融合一維卷積神經網絡和雙向門控循環單元的APM車輛輪胎徑向載荷識別方法
2023-02-20 12:54:44曾俊瑋季元進任利惠葛方順孫澤良黃章行
中國機械工程 2023年3期
曾俊瑋 季元進 任利惠 葛方順 孫澤良 黃章行
同濟大學鐵道與城市軌道交通研究院,上海,201804
0 引言
輪胎載荷是車輛設計、安全性評估的基礎數據,是車輛研發所必須知道的邊界條件。測量輪胎載荷是進一步優化車輛設計、提高車輛機械強度和運行性能所必需的基礎工作。車輛系統的狀態檢測對行車安全起著至關重要的作用,輪胎動態載荷作為車輛與道路相互作用的直接結果,是數據監測的重點。特別是在曲線工況行車的情況下,左右側走行輪出現增載與減載現象,嚴重時可能導致車輪傾覆,輪胎動態載荷對行車安全性的影響進一步加大。其中,對車輛行車安全性和平穩性影響最大的輪胎動態載荷主要為徑向載荷,其頻率范圍大致在0~40 Hz。
輪胎載荷的監測方法包括直接測量法與間接識別法。直接測量法原理簡單,但具有很大的局限性:由于輪胎-路面之間的高速相對運動及各個方向載荷的相互影響,運行狀態下的激勵載荷通常難以測量,且車輛系統結構設計大多沒有考慮傳感器的安裝位置,傳感器的引入往往會阻礙系統的正常運行甚至改變原有結構的固有特性。如今常用的車輪六分力計[1]可實現車輪所受六分力的實時動態同步精密測量,但需要根據車輪輪轂定制生產,成本極高,不易推廣。
國內外很多學者也提出了一些間接的載荷求解方法。LAW等[2]通過時域算法利用橋梁彎矩和振動加速度辨識出列車以恒速通過橋梁時的垂向移動載荷,并利用最優狀態估計方法在頻域建立了移動載荷識別模型,識別出移動載荷功率譜,再通過逆傅立葉變換求得移動載荷的時程曲線,形成了移動載荷識別系統[3],該系統在實際工程應用中具有一定的精度和穩定性,但仍然存在許多不足之處。YU等[4]利用時-頻域辨識法由響應識別移動載荷,并重點比較了偽逆解法和奇異值解法的識別結果,討論了載荷間距與移動速度以及測量噪聲等參數對載荷識別結果的影響。XIA等[5]提出了鐵路貨車輪軌接觸力的反演模型,利用貨車車體動態響應數據反演出輪軌接觸力,但由于懸掛裝置的隔離作用,輪軌接觸力的高頻分量不能很好地被預測。BAFFET等[6]提出了一種考慮道路摩擦變化的自適應輪胎力模型,將車輛模型和輪胎力模型相結合,構造了自適應觀測器,用以計算輪胎側向力、車輛側滑角和路面摩擦力。DAKHLALLAH等[7]提出了利用擴展卡爾曼濾波器來估計車輛動態狀態和輪胎-路面力的方法,并使用摩擦模型根據估計的縱向和橫向力來評估摩擦因數和側滑角。上述方法均基于物理模型,在建模時對一些復雜的非線性系統進行簡化,從而造成識別精度降低,識別效果不佳,且識別條件較為苛刻,難以真正應用于工程實踐。
近年來,隨著計算機水平的提高以及車輛系統感知能力的增強,基于數據驅動的載荷識別模型被越來越多的學者研究。LI等[8]提出一種基于徑向基函數網絡的連續測量輪軌接觸力的方法,為載荷識別提供了新的思路,但受限于徑向基神經網絡的性能,該模型未能達到較好的結果。張冉佳[9]將BP神經網絡應用于輪軌載荷的識別上,并用遺傳算法對模型進行優化,完成載荷的識別,但誤差較大。羅金屯等[10]建立了卷積神經網絡模型來對輪軌力進行反演,對輪軸橫向力反演結果進行對比分析,發現該模型在直線和曲線軌道行車條件下均能有效擬合趨勢變化和數據指標。目前相關研究多為簡單的神經網絡模型的應用,識別精度仍有很大提升空間,且研究對象大多為既定的數據集,缺乏對不同質量數據適用性的考量,模型應對噪聲情況較為惡劣的數據時,其預測效果不佳,缺乏一定的現實應用意義。
本文提出一種基于一維卷積神經網絡和雙向門控循環單元混合的神經網絡的載荷識別方法。卷積神經網絡(convolutional neural networks,CNN) 可以有效地提取信號的多維度空間特征;門控循環單元(gate recurrent unit,GRU)作為循環神經網絡的變體,在處理時序數據時性能表現優異;而雙向門控循環單元(bi-directional gated recurrent unit,BiGRU)可雙向捕獲特征,能更好地提取時序數據隱含信息,兩者的結合大大增強了對多維度時序數據的空間、時序特征提取能力。該方法充分考慮輪胎徑向載荷數據的先驗信息,以車輛振動響應、車體位姿、運行狀態等信息構建的特征集作為輸入,利用1D CNN提取特征在高維空間的聯系形成高維預測特征向量,再輸入BiGRU中提取時序特征,最終輸出載荷預測的結果。以APM300型車輛為例,采用該方法建立其走行輪和導向輪徑向力的預測模型。
1 基本原理
1.1 一維卷積神經網絡1D CNN
卷積神經網絡是一類包含卷積計算且具有深度結構的前饋神經網絡,主要由輸入層、卷積層、池化層、全連接層和輸出層構成。對單維時序信號的處理常采用1D CNN,其基本架構如圖1所示,整個網絡共計l層。對于輸入的時間序列x=[x1x2…xn]T,首先通過卷積層進行特征提取。不同的一維卷積核通過對局部區域卷積可提取出不同的特征信號。第i層的輸出結果xi可由上一層的輸出xi-1得到:
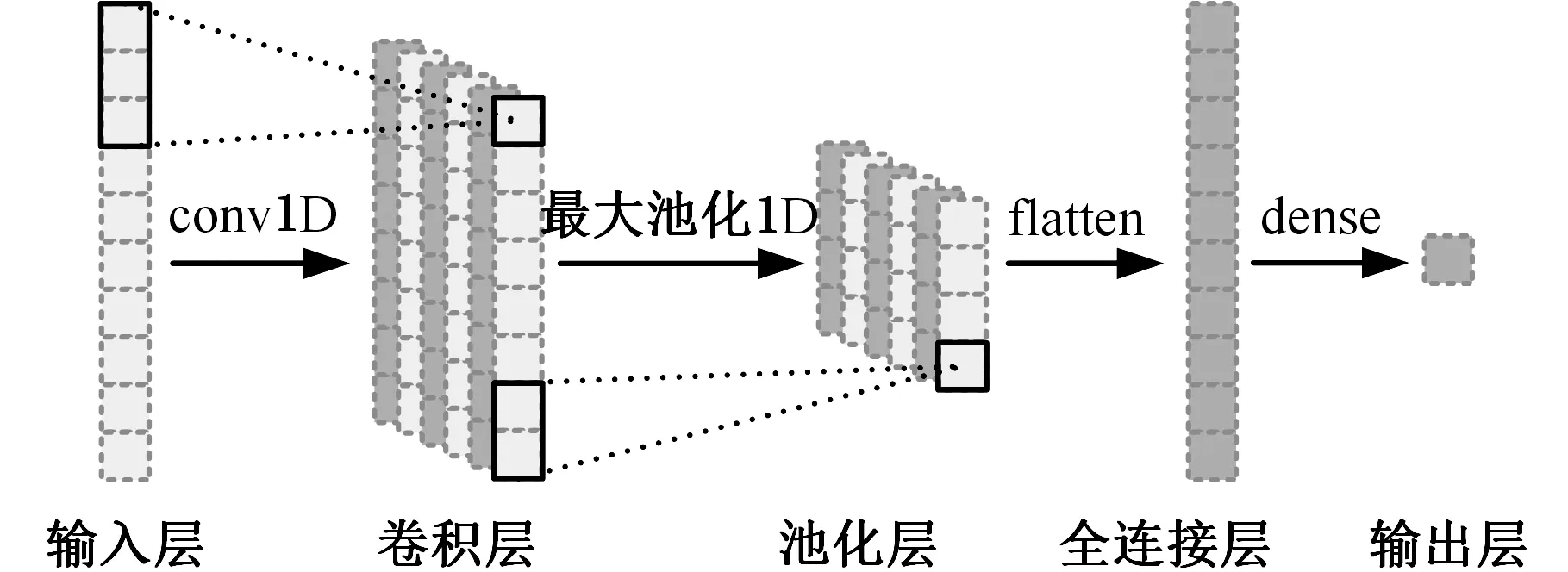
圖1 1D CNN基本架構
xi=fi(wi?xi-1+bi)
(1)
其中,wi為第i層權值矩陣;bi為第i層偏置矩陣;fi為第i層激活函數。本文卷積層及全連接層的激活函數均選用LeakyReLU函數,其形式如下:

(2)
LeakyReLU函數在繼承ReLU函數優點的同時,解決了ReLU的局部神經元死亡問題,在負區域具有小的正斜率,因此,即使對于負輸入值,它也可以進行反向傳播。
隨后將卷積層提取的特征信號輸入池化層。池化運算用于選擇卷積層序列最重要的特征并實現特征降維,簡化網絡計算復雜度。本文的池化運算選取最大值池化。根據實際需要設計多層卷積層與池化層,將最后一層池化層的輸出作為輸入傳遞給全連接層。全連接層最終輸出結果為
y=fl(wl?xl-1+bl)
(3)
式中,wl為第l層權值矩陣;bl為第l層偏置矩陣;fl為第l層激活函數。
將輸出層結果與實際值的誤差反向傳遞,計算誤差梯度并更新權值及閾值,直至誤差滿足條件,完成訓練。表征均方誤差的損失函數如下:
(4)

1.2 雙向門控循環單元BiGRU
門控循環單元是循環神經網絡(recurrent neural network, RNN)的一種。循環神經網絡具有記憶能力,能夠有效保存歷史信息,是專門用以處理序列信息的具有時間依賴的網絡。長短期記憶網絡(long short-term memory,LSTM)是一種特殊的RNN,通過門控機制使循環神經網絡記憶歷史信息并選擇性忘記一些不重要信息,且能夠保留長期依賴的信息。GRU是LSTM的一種變體,參數相對少更容易收斂,訓練效率高,能降低過擬合的風險,可有效解決RNN梯度消失的問題,適合構建較大的網絡。
GRU引用重置門(reset gate)與更新門(update gate)的門控機制來控制梯度信息傳播,緩解梯度消失現象,其結構如圖2所示。重置門與更新門分別用于捕捉時間序列里短期的依賴關系和長期的依賴關系,當前時間步輸入xt和上一時間步的隱藏狀態ht-1作為重置門與更新門的輸入,經由激活函數為sigmoid的全連接層計算得到輸出。

圖2 GRU結構原理圖
重置門輸出rt為
rt=σ(wr?[ht-1,xt]+br)
(5)
更新門輸出zt為
zt=σ(wz?[ht-1,xt]+bz)
(6)

(7)
式中,wr、wz、wh為權值矩陣;br、bz、bh為偏差矩陣。
ht-1包含時間序列從前端某時刻至上一時間步的全部歷史信息,由式(7)可知,重置門的輸出rt控制了上一時間步的隱藏狀態ht-1到當前時間步的傳遞,因此,重置門可以用來丟棄無意義的歷史信息。
(8)
雙向門控循環單元(BiGRU)由一個前向的GRU和一個反向的GRU網絡構成,其框架如圖3所示。BiGRU網絡可以提取時序信號在時間順序及時間逆序上的特征,記憶時間片段起點及終點至當前時間步的前向及反向歷史信息。其隱藏狀態ht由前向傳播層的輸出hLt與反向傳播層的輸出hRt計算得到:

圖3 BiGRU總體框架
ht=m(wLhLt+wRhRt)
(9)
其中,wL、wR分別為hLt、hRt的權值矩陣;m為拼接函數。BiGRU充分利用了單時刻前后時段的信息,使特征提取更加全面,提高了預測的精度。
2 輪胎徑向載荷識別模型
本文模型理論框架如圖4所示。軌道不平順產生的載荷激勵輸入至車輛系統激發相應的振動響應,結合車體位姿、運行狀態等多源信息,經數據預處理,特征選擇后保留有效的特征子集,作為一個樣本的輸入,而載荷值則作為該樣本的標簽。構造“多時間步輸入-單時間步輸出”形式的樣本集,用于訓練基于1D CNN和BiGRU的輪胎徑向載荷識別模型。該模型聯合應用一維卷積神經網絡和雙向門控循環單元,可充分提取信號的時間空間特征,且具有較強的抗噪能力。采用均方誤差MSE、可決系數R2score等指標評判模型的識別誤差及精度,并分析模型在不同運行工況下的泛化性能,應對不同噪聲級別和異常程度的輸入數據的魯棒性能,不斷改進,得到最終模型。
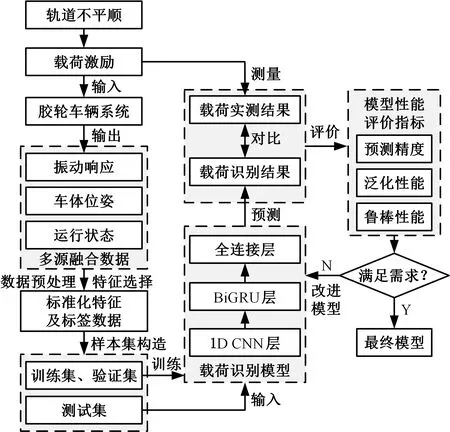
圖4 模型理論框架
2.1 數據處理與特征選擇
由于多源輸入數據具有不同的量綱,為了提高訓練效果,需將原始數據轉換為量綱一指標測評值,故對數據進行歸一化或標準化處理。由于車輛系統運行工況繁多且復雜,數據可能存在較多異常沖擊值,而極端值會對歸一化效果產生很大影響,故本文采用Z-Score標準化方法,計算公式如下:
(10)
式中,x為原始數據;μ為平均數;σ為標準差。
在車輛系統布置雷達、加速度計、位移傳感器、陀螺儀等傳感器,可采集多個通道的信號,每個通道的信號為樣本的一種特征。由于傳感器種類繁多及測點布置位置多樣,每個樣本的原始特征很多,為提高模型的效率和泛化性能,避免維度災難,需對輸入數據進行特征選擇,去除無關特征及冗余特征。本文采用過濾法(Filter)和包裹法(Wrapper)組合式算法,先使用Filter剔除無關特征,降低特征維度;然后利用Wrapper進行特征選擇,去掉冗余特征。其中,Filter采用互信息法,捕捉每個特征和標簽之間的任意關系(包括線性和非線性),進行相關性的計算,其公式為
(11)
其返回值在0~1之間,0表示完全不相關,1表示完全相關。Wrapper則是結合后續回歸模型,根據評估結果進行選擇,它包含4個主要過程:①候選特征子集的生成;②特征子集優度的評價;③終止條件的判定;④特征子集有效性的驗證。
2.2 樣本集構造與網絡設計
特征選擇后的多源時間序列數據構成特征集,將標準化后的m個通道的數據進行拼接、截取、滑動取樣。每一時刻的載荷值作為一個樣本的標簽,該時刻前后共l個時間步長的振動響應、車體位姿、運行狀態信息作為一個樣本的特征,構造出形式為l×m個輸入、1個輸出的樣本,如圖5所示。相比單時刻輸入輸出對應的樣本,本文的樣本構造方式充分考慮了研究對象是時序信號而非普通數據的現實,以時間片段取樣使得每個樣本的輸入充分保留了時間維度上的特征信息,由時間切段而非單個時刻的特征預測輸出,可有效克服各傳感器測點存在相位差、動力學系統輸入輸出存在時間滯后、單個時刻數據可能損壞或異常、信號含噪聲過多等情況帶來的識別不準問題,使模型更穩定,魯棒性更強。
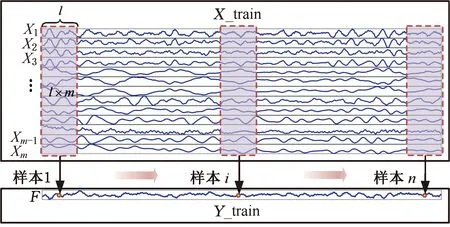
圖5 樣本集的構造
本文將1D CNN 和BiGRU集成并改進后應用到膠輪車輛徑向載荷識別模型中,充分發揮CNN的空間特征提取能力和BiGRU的時序特征提取能力。在CNN 中加入BN 層,用來規范數據分布,增強模型泛化性能和魯棒性能;在全連接層加入Dropout 層來隨機屏蔽部分神經元輸出,防止模型過擬合。采用學習率可以自適應的ADAM優化算法來訓練模型,實現車輛徑向載荷的識別。
以下節具體使用到的1D CNN-BiGRU模型為例,其網絡結構如圖6所示。單個樣本的輸入為14個通道100個時間步的時序數據,輸出為中間時刻的載荷值。對樣本的輸入再次進行滑動取樣,取樣窗大小為10×14,步長為1,共取得按照時間順序的91組10×14的小片段。對以上小片段經過兩次卷積、最大池化操作提取數據空間特征,一維卷積核的大小為[1,1],步長為1,兩次卷積深度分別為14和128,卷積核個數分別為128和64,激活函數采用LeakyReLU;卷積和池化過程中不進行填充,最終得到64個通道的特征數據。
將91組64通道的特征數據輸入至BiGRU層中,雙向提取時序數據的隱含信息,BiGRU的隱含單元數設置為20。將BiGRU層的輸出經Flatten層展平后輸入至全連接網絡,其兩個隱藏層的神經元數量分別為64和8,Dropout 率設為0.2,最終輸出載荷預測值。
網絡訓練過程中的損失函數(loss function)選用均方誤差(mean square error,MSE),其計算方式如下:
(12)
同時,采用可決系數R2score評估模型的精度,其定義如下:
(13)

在工程應用中,對輪胎載荷的識別具有實時性要求,故引入平均推理時間用以量化模型的載荷識別效率,并作為模型應用價值的考核指標之一。本文定義平均推理時間為100 Hz的采樣頻率下,模型對測試集每1 s的輸入數據完成載荷識別的平均時間。
3 實例分析
3.1 模型預測結果及誤差分析
選擇龐巴迪公司生產的Innovia APM 300車型對本文方法進行驗證。APM車輛也稱為自動旅客捷運系統,是一種以無人駕駛膠輪車輛為主導的、在專用線路的運行道與導向軌上全自動運行的城市軌道交通系統制式。APM 300采用高壓充氣輪胎走行,實心橡膠輪胎導向,走行部的結構如圖7a所示[11]。輪胎動態載荷對APM車輛的運行安全性和平穩性十分重要,而其中徑向載荷的影響尤為重要。因此,本文主要研究對象為走行輪徑向力和導向輪徑向力,兩者分別為走行輪-走行面及導向輪-導向軌之間的法向作用力,如圖7b所示[12]。

(a)走行部結構
利用滾動試驗臺測得輪胎物理參數,通過標準實驗測得車輛系統質量、慣量及其他懸掛的物理參數,建立車輛動力學模型,并以實際線路動力學實驗對模型進行驗證。利用該仿真模型在多種工況下進行實驗,并構造仿真數據集。本節數據原始信噪比為6 dB,運行工況為時速20 km/h下直線工況,數據信號的采樣頻率為100 Hz。走行面不平順為ISO 8608A級公路譜,導向軌不平順為美國五級譜。
以一位車體、一位軸及左側走行輪、左前側導向輪為例進行研究,結合實際工程應用中的采集可行性與便捷性初步選取車輛系統的諸多狀態參數特征,并采用Filter-Wrapper組合式算法進行特征選擇,去除無關特征與冗余特征;最終保留車輛系統的14個易測得且有意義的狀態參數特征作為預測模型的輸入,如表1中x1~x14。走行輪徑向力和導向輪徑向力作為模型輸出,如表1中Fw和Fg。在實際應用中,車體及軸橋的加速度由加速度計測得,車體-軸橋的相對位移由激光位移傳感器測得,車體點頭、側滾、搖頭角速度由陀螺儀測得,一系、二系懸掛轉向角度由拉線位移傳感器測量計算得出。
采用圖6所示的1D CNN-BiGRU模型對走行輪徑向力進行識別。為了驗證本文方法的有效性,構建了不同的載荷預測神經網絡模型作為對比模型,包含常用的ANN、LSTM、CNN等,并根據數據特點選取合適的模型參數。在訓練過程中,各模型訓練誤差及訓練精度的變化情況如圖8a所示,測試誤差及測試精度的變化情況如圖8b所示,其中一個訓練周期指所有的數據送入網絡中完成一次前向計算及反向傳播的過程。

(a)訓練集
各模型最后一個訓練周期訓練集和測試集的MSE值和R2指標及測試集平均推理時間見表2。可以看出,各模型測試誤差與訓練誤差相差不大。由于原始樣本數據包含大量噪聲,導致ANN與LSTM模型的誤差較大,而多時間步輸入的樣本形式及CNN的使用,可以有效地提取時間片段上的特征信息,避免了單時刻異常數據的負面影響,起到抗噪的作用。在該噪聲等級的數據環境下,本文模型最終測試集MSE值達0.0623,相比其他模型降低了31.8%~78.7%;R2值達0.9002,相比其他模型提高5.4%~69.4%;平均推理時間為17.40 ms,略長于其他模型,但絕對值仍保持在很低的水平,具有很高的效率和實時性,滿足工程需求。上述結果證明了本文模型應對實際含噪信號時識別誤差小,精度高于其他模型,實時性保持在較高水平,具有較高的工程應用價值。
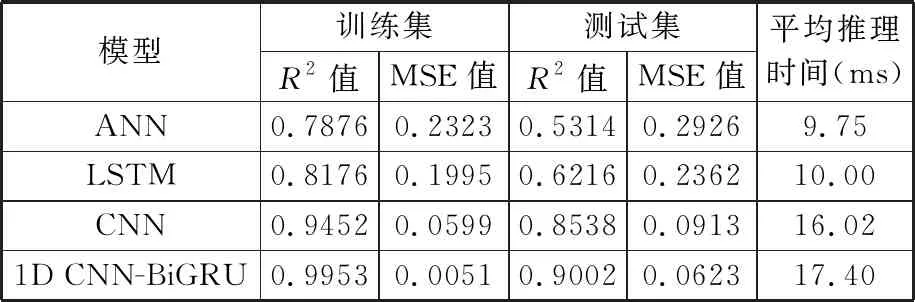
表2 不同模型誤差與精度對比(走行輪)
一組測試集的實際走行輪徑向力與各模型預測值的對比結果如圖9所示,該測試集為該工況下車輛連續運行3 s內的數據,采樣頻率100 Hz,共計300條樣本數據。由圖9可以看出本文模型對走行輪徑向力的預測結果和實際值最為接近,誤差最小。

圖9 不同模型預測結果對比(走行輪)
信號的實質是不同頻率波的疊加,信號在頻域上比在時域上有著更加簡單直觀的特性和更加明確的物理意義,因此,大部分信號分析工作是在頻域中進行的。本模型預測結果在時域上很好地貼合了真實值,但它是否具備更高的應用價值,還需通過頻譜對比進行評判。不同模型預測結果的頻譜與真實值頻譜的對比如圖10所示,可以看出本文模型預測值的頻譜和真實值頻譜最為接近,很好地還原了原載荷信號的頻域特性。
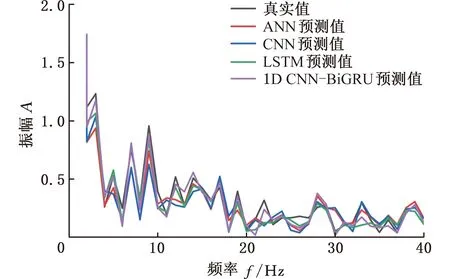
圖10 不同模型預測結果的頻譜對比(走行輪)
同理,將本文模型應用于導向輪徑向力的識別中。訓練過程中各模型訓練集和測試集誤差及精度的變化情況如圖11所示。

(a)訓練集
各模型最后一個訓練周期訓練集和測試集的MSE值和R2指標及測試集平均推理時間見表3。可知,各模型測試誤差與訓練誤差相差不大。在導向輪徑向力的識別上,本文模型最終測試集MSE值達0.1012,相比其他模型降低47.8%~70.1%;R2值達0.8088,相比其他模型提高27.5%~124.8%;平均推理時間為17.25 ms,略長于其他模型,但仍具有較強的實時性。相比走行輪徑向力,導向輪徑向力的預測精度較低,但仍處于較高水平,優于其他對比模型。
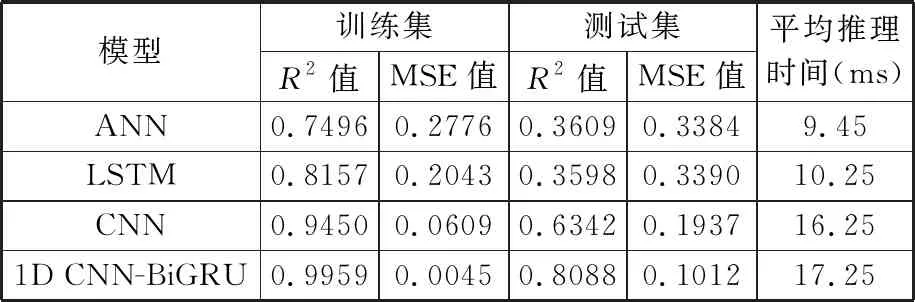
表3 不同模型誤差與精度對比(導向輪)
一組測試集的實際導向輪徑向力與各模型預測值的對比結果如圖12所示,可以看出本文模型對導向輪徑向力的預測結果和實際值最為接近,誤差最小。
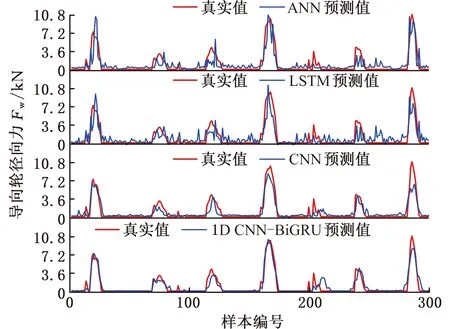
圖12 不同模型預測結果對比(導向輪)
上述測試集各模型預測值與真實值的頻譜對比結果如圖13所示,可知本文模型預測值的頻譜和真實值頻譜最為接近,很好地還原了原載荷信號的頻域特性。

圖13 不同模型預測結果的頻譜對比(導向輪)
3.2 模型泛化性能評估
設置運行速度20 km/h、30 km/h、40 km/h下的直線線路及曲率半徑300 m、200 m、100 m的曲線線路共12種工況,以走行輪為例,在同樣的噪聲環境及軌道不平順激勵下本文模型在上述12種工況下連續2 s內的載荷識別效果如圖14所示。圖中R為曲率半徑,v為車速。

(a)直線 (b)R=300 m (c)R=200 m (d)R=100 m
不同工況測試集的MSE值和R2值見表4。可知,本文模型在不同運行速度及不同半徑的曲線工況下R2值均達到0.9以上,MSE值均在0.1以下,識別精度較高,適用于不同工況,具有很強的泛化能力。

表4 不同工況的識別誤差與精度
3.3 模型魯棒性能評估
在車輛系統實際運行中,各傳感器采集的信號必然存在噪聲,尤其當路況不好時,信號中噪聲成分很大,這可能導致原本理想環境下預測效果很好的載荷識別模型在實際應用中效果很差。因此,所建立的載荷識別模型必須具有對不同程度的噪聲的抗干擾能力,即具備較好的魯棒性能,方能具有較大的工程應用價值和現實意義。
當原始輸入數據依次為1 dB至1000 dB信噪比的含噪信號時,各模型的MSE值如圖15a所示,R2值如圖15b所示。可知,當信噪比在100 dB以上時,4種模型均呈現出極好的識別效果,MSE值均在0.06以下,R2值均超過0.92,此時各模型效果差別很小。當噪聲程度加大,信噪比小于100 dB時,ANN和LSTM模型的識別效果迅速下降,最終降至很低的水平;而CNN和本文模型1D CNN-BiGRU也有所下降,但降幅很小,仍一直保持著較高水平的識別精度。當信噪比達到1 dB時,4種模型的R2值依次為0.1873、0.1902、0.7013和0.7759。由此可見,本文模型具有優異的魯棒性,能很好地適用于惡劣噪聲環境下的載荷識別。

(a)MSE值
4 結論
(1)本文充分發揮CNN的數據挖掘優勢,提取非連續數據在高維空間中的潛在聯系。使用BiGRU雙向捕獲特征,更好地提取時序數據隱含信息。兩者的結合大大增強了對多維度時序數據的空間、時序特征提取能力。
(2)本文構造了多時間步輸入-單時間步輸出形式的樣本,以時間片段取樣使每個樣本充分保留了時間維度上的特征信息。利用時間切段而非單個時刻的特征預測輸出,有效預防了各測點之間實際存在相位差、單個時刻數據可能損壞或異常等情況,使得模型魯棒性更強。
(3)本文提出了評價模型應用價值的指標,包含模型預測精度、表征模型對不同運行工況適用性的泛化性能,以及表征模型對不同信噪比輸入數據適用性的魯棒性能。實例結果顯示,與其他模型相比,本文方法有更高的預測精度及更好的泛化性能和魯棒性能,適用于多種工況及惡劣噪聲環境下的載荷識別,具有較強的現實應用價值。
(4)本文模型在設計與建立過程中并不包含對車輛結構及輪胎參數的限制與要求,故理論上也適用于其他車型車輛的載荷識別,如單軌列車、膠輪地鐵、膠輪導軌有軌電車、虛擬軌道列車等輪胎走行部軌道交通車輛,乃至公路汽車、鐵道車輛等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
