基于多源數據融合的復雜區域文物三維重建應用
2023-02-23 11:20:16黃北生王云凱
北京測繪 2023年1期
黃北生 王云凱
(江蘇省地質測繪院, 江蘇 南京 211102)
0 引言
文物作為人類歷史文化遺產,是人類創造的且不可重新創造的人類社會活動的遺物、遺跡[1]。隨著時間的推移,許多處于室外的文物受到了自然侵蝕或人為破壞[2]。文物數字化數據作為文物存檔重要的基礎數據,在文物的管理和修繕中有著重要的支撐作用[3]。傳統的利用全站儀、測距儀等文物數字化方法,雖然能夠精確地測量文物圖件數據,但也存在著工作量大、文物表面細化程度不夠、復雜區域采集困難等問題。
隨著科技的發展,新的技術如傾斜攝影、貼近攝影測量、三維點云等技術被應用到文物數字化工作中。文獻[4]通過制定不同的數據采集方案,將傾斜攝影測量應用到了古橋、古村落數據采集的中;文獻[5]將貼近攝影測量技術應用到巖畫的高精度、三維數字化工作;文獻[6]基于點云數據實現了文物復雜表面的高精度表達。然而,各種新技術也有其一定的局限性,傾斜攝影在復雜區域或帶檐文物數據采集時,往往存在視角盲區,導致模型出現拉花、扭曲等現象[7-8];貼近攝影測量具有航線規劃復雜、飛行操控要求較高等問題;三維點云技術存在著文物上部點云獲取困難、無紋理信息等問題[9]。
本文以南京市棲霞寺舍利塔為例,提出一種結合傾斜攝影、貼近攝影測量和地面三維點云的多源數據復雜區域文物三維模型建設方法。該方法以傾斜攝影為控制基礎,結合貼近攝影測量和地面三維點云數據融合處理,以得到更為精細、美觀的文物三維模型。
1 多源數據融合及關鍵技術
1.1 多源數據融合技術
多源數據融合是起源于軍事應用角度的一種數據處理技術[10]。該技術通過多角度、多層次的處理過程,運用多源數據檢測、關聯、組合等操作,實現狀態判斷、身份辨識、態勢評估等高精度評價。多源數據的融合過程主要包括多傳感數據獲取、數據預處理、特征提取、融合計算、融合數據輸出等過程[11]。數據融合層次分為數據級融合、決策級融合和特征級融合[12-13]。本文采用傾斜攝影、貼近攝影測量和地面三維點云數據融合,依據各融合層次分類特點,采用數據級融合的方式進行,數據級融合流程見圖1。
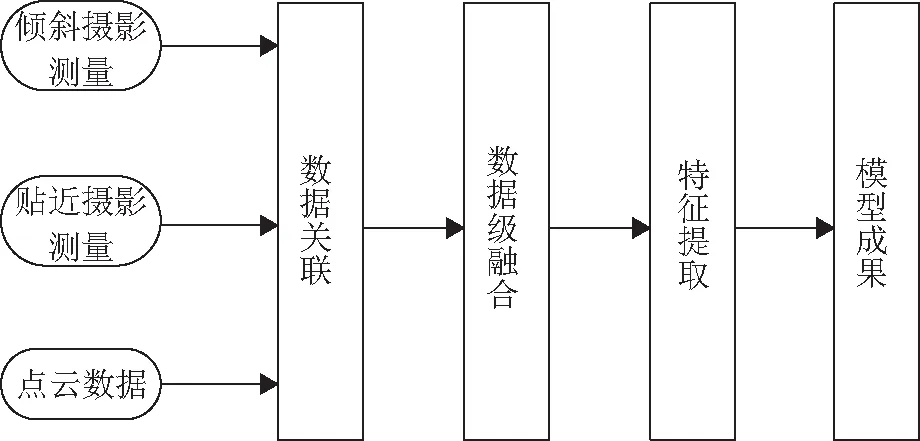
圖1 數據級融合流程
1.2 多源數據三維建模關鍵技術
基于1.1 的分析,基于多源數據融合的三維模型建設主要包括數據采集、數據預處理、空間融合、數據信息融合、成果輸出等。其中數據預處理是對各單一數據源進行的常規數據處理,為數據融合做準備;空間融合是對各數據源進行統一的空間配準,形成位置信息的融合;數據信息融合是對空間融合后的數據進行建模,生成完整的、精細的三維模型。
1.2.1 空間融合
多源數據空間融合最主要的方法是將各數據進行坐標系的統一[14]。本文涉及的坐標系統一包括傾斜攝影與貼近攝影測量的坐標統一和攝影測量與點云數據坐標系統一兩個方面。
相對于傾斜攝影測量貼近攝影測量主要具有沿被攝物體的表面進行數據采集和相機角度隨物體表面調整的特點[15]。因此,為保證傾斜攝影和貼近攝影測量能夠進行坐標系的統一,本文從兩個方面進行設計:
(1)統一數據采集系統。選用帶有云臺的攝影相機為影像數據采集設備,數據采集具有相同的相機、相同的全球導航衛星系統(global navigation satellite system,GNSS)接收設備、相同的慣性測量單元(inertial measurement unit,IMU)設備和相同的數據采集坐標系。
(2)像控點布設。通過在采集區域布設像控點的方式,實現兩者在進行建模時的統一。

(1)
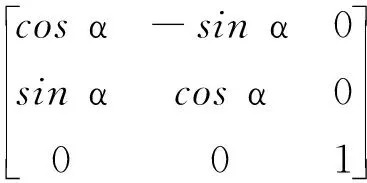
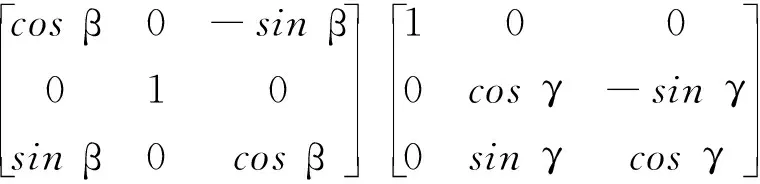
式中,R為旋轉矩陣;T為平移矩陣;α、β、γ為各旋轉軸旋轉角。
1.2.2 信息融合
基于多源數據的信息融合如圖2所示。

圖2 多源數據信息融合
首先對傾斜攝影、貼近攝影和地面三維點云數據進行初步處理,分別得到影像數據和點云數據。其中,傾斜攝影與貼近攝影通過控制點進行融合空三計算,進一步得到密集點云。地面三維原始點云通過預處理,并結合控制點進行點云配準。然后,將配準后的點云數據進行去噪、裁切等得到融合區域點云。將生成的密集點云與地面三維點云數據進行精配準,得到融合后的點云數據,然后進行不規則三角網(triangulated irregular network,TIN)的構建、紋理映射和三維重建。
2 應用實例
2.1 環境概況
棲霞寺舍利塔位于南京市棲霞山中峰西麓棲霞禪寺東,是中國最大的舍利塔,該石塔為五代南唐(937—975年)重建。舍利塔為密檐式,五級八面,自下而上分為塔座、塔身和塔剎3部分,通高18 m。該塔周圍環境較為復雜,北面臨近高約12 m的建筑;東面為山體,帶有較高樹木;西側為院門;南面較為開闊,但臨近樹木枝葉較為繁茂[16]。同時,該區域游客絡繹不絕,較狹窄范圍內聚集了大量人員,不利于數據的采集。舍利塔周圍環境見圖3。

圖3 舍利塔環境圖
2.2 傾斜攝影采集
本文傾斜攝影測量既作為舍利塔上部信息采集數據,也兼有區域控制的作用。本文采用大疆精靈4實時動態載波相位差分技術(real time kinematic,RTK)無人機進行傾斜攝影測量的數據采集。采用“#”字型飛行設計,航向重疊度和旁向重疊度都設置為80%,基于周圍環境因素,云臺傾角設置為“-60°”,航攝高度為50 m。傾斜攝影航線如圖4所示。

圖4 傾斜攝影航線
2.3 貼近攝影測量
由于環境限制,此次貼近攝影測量無法采用環形航線規劃的形式進行。因此,本文貼近攝影測量采用手動控制無人機進行拍攝的方式進行。為保證飛行安全,將飛行自上而下分為兩個部分進行。數據采集上半部分,定位系統信號影響較弱,且對地面人員安全影響較小,數據采集沿著舍利塔八個角從上到下每隔1 m拍攝照片,拍攝角度分別為30°、15°、0°、-15°、-30°或者根據實際情況更改拍攝角度。數據采集下半部分,既要考慮信號影響,又要注意人員安全,因此,數據采集沿著舍利塔八個角從上到下每隔2 m拍攝照片,拍攝角度分別為30°、15°、0°、-15°、-30°或者根據實際情況更改拍攝角度。同時,依據部分可能出現漏洞的地方進行了補拍。貼近攝影測量數據采集見圖5。

圖5 貼近攝影測量
2.4 三維點云數據采集
本文三維點云數據采集采用徠卡RTC360 LT掃描儀,該設備采用波形數字化技術(wave form digitizer,WFD),掃描范圍0.5~130 m,掃描速率100萬點/s。同時,在舍利塔周圍布設了8個控制點,即為點云拼接的公共點,也是多源數據融合的控制點。
3 模型建設結果與分析
3.1 單一數據源模型效果分析
基于傾斜攝影技術進行模型建設,對舍利塔頂部構造表達較好。但對于舍利塔底部構造和雕刻分辨率較低,同時對于舍利塔檐下細節無法進行模型建設,出現檐下扭曲變形等現象。
貼近攝影測量能夠獲取分辨率較高的舍利塔側面和檐下構造紋理信息。但由于數據采集環境的限制,導致部分區域照片重疊度不夠,模型部分細節紋理信息較弱、模型有粘連現象。
點云數據采集中,由于數據采集方式的限制和舍利塔本身結構的遮擋,導致舍利塔部分區域無法采集到點云數據,出現模型空洞。
3.2 多源數據融合的精細化模型建設
本文采用Contextcaptur軟件進行多源融合的精細化模型建設任務。首先將采集的傾斜攝影照片和貼近攝影測量照片通過控制點進行融合空三技術得到密集點云,然后導入地面點云數據,通過構建和優化TIN網,進而生產三維模型白模和進行紋理映射,得到多源融合的精細三維模型。
3.3 模型效果對比分析
為對比分析多源融合精細化模型的效果, 本文從模型完整性、檐下模型、模型空洞、模型紋理細節等方面進行對比,模型完整性對比如圖6~圖9所示。

(a)傾斜模型

(a)傾斜模型

(a)傾斜模型

(a)傾斜模型
由以上對比可知,多源融合精細化模型能夠完整地建設出舍利塔完整的模型,對于檐下扭曲變形、模型粘連、模型空洞等問題也能很好地解決,同時該方法能夠更好地表達文物紋理信息。
4 結束語
本文采用了基于傾斜攝影數據、貼近攝影測量數據和地面三維點云數據的空地多源數據融合精細建模技術進行復雜區域文物三維模型建設。試驗結果表明,多源融合精細化模型可有效解決單一數據源模型存在的扭曲變形、模型粘連、模型空洞等問題,同時能夠更為精細地表達文物表面紋理,能夠為文物數字化提供更為詳細的數據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45