長距離地面三維激光掃描儀在礦山勘測中的應用研究*
2023-02-24 09:32:56孫勇廖沖斌羅陽鄧濤
現代礦業 2023年1期
孫勇 廖沖斌 羅陽 鄧濤
(1.四川省地質礦產勘查開發局區域地質調查隊;2.四川省天府容大信息科技有限公司)
三維激光掃描技術是一種能夠實現全自動、快速性、非接觸、高密度、高精度獲取反映物體表面真實三維空間形態的三維空間信息獲取技術,數據獲取結果為海量的點云(Point Cloud),逼近三維原型,突破了傳統測繪儀器(全站儀、GPS-RTK 等)的單點測量模式,近年來在測繪地理信息領域實現了應用拓展[1-2]。基于三維激光掃描技術,文獻[3]采用六段解析法對徠卡C10 三維激光掃描儀在測距50 和100 m 處進行試驗;文獻[4]利用比長基線場在測距72 和192 m 處對RIEGL-VZ1000 進行測距精度評定;文獻[5]利用試驗場地在最遠距離150 m 處開展試驗,研究結果顯示測距精度隨距離的變長呈下降趨勢;童魁等[6-7]以三維激光掃描儀入射角、點云拼接影響因素為研究對象開展試驗研究。地面三維激光掃描儀的標稱精度由儀器廠商提供,實際應用精度能否達到出廠標準是未知的;受試驗條件限制,學者對掃描距離評定研究主要是短程(200 m 以內),無法滿足中遠程三維激光掃描儀對掃描結果的質量控制需求。
為驗證長距離地面三維激光掃描儀數據獲取結果的可靠性,以三維激光掃描系統的點云坐標測量和坐標轉換為基礎,設計了RIEGL-VZ2000i(掃描距離達2.0 km)三維激光掃描儀在礦山勘測中的精度檢測試驗。采用在試驗礦區設定固定標靶,利用RIEGL-VZ2000i 三維激光掃描儀開展掃描測量,同時使用徠卡TS60高精度全站儀以無棱鏡模式對標靶進行坐標測量,經數據處理后對2種不同方法的測量結果進行比較,從內符合性和外符合性兩方面對RIEGL-VZ2000i 單站掃描測量精度進行評定,并對多站間點云拼接(配準)精度進行評價。
1 三維激光掃描系統
1.1 點云坐標測量
三維激光掃描儀是一部精確的激光測距儀,核心工作原理是激光測距和激光束電子測角系統的自動化集成,工作效果類似于將傳統全站儀的點測量模式轉化為線、面測量模式,掃描儀通過掃描即可獲取目標體的大量三維坐標數據。測量用三維激光掃描儀主要是基于脈沖測距法進行激光測距,即激光測距儀通過主動發射激光,接收由自然物表面反射的信號而進行測距,測距實則為測量激光脈沖的飛行時間。
設激光脈沖的飛行時間為t,則掃描站的激光發射幾何中心至掃描點的斜距S可表達為
式中,cg是激光脈沖在光透明介質中傳播的光速,與大氣溫度、壓力和濕度有關。
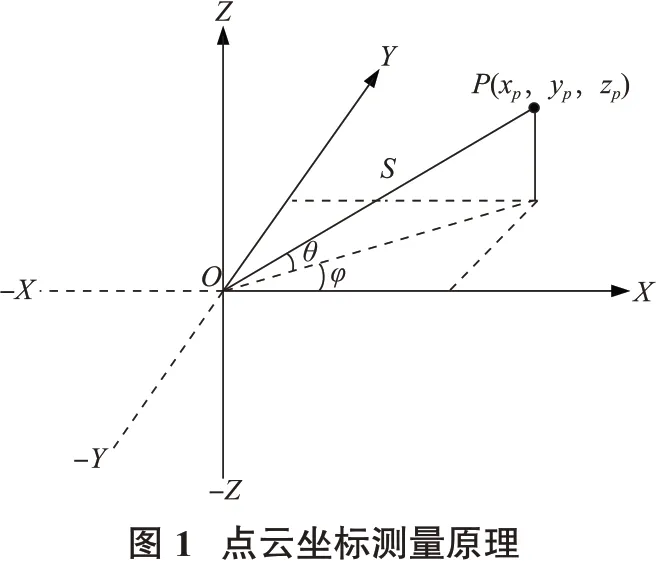
三維激光掃描儀在激光測距的同時,通過控制系統可獲得掃描時激光束的水平方向角度φ和垂直方向角度θ,從而可得到每一個掃描點與激光發射中心的空間相對位置(圖1)。
設儀器坐標系為O-XYZ,X軸平行于儀器掃描平面,Y軸在掃描平面內垂直X軸,Z軸垂直于掃描平面,為儀器的豎軸方向,根據極坐標測量原理,可以得到掃描點P(xp,yp,zp)的空間相對位置為
1.2 點云坐標轉換
三維激光掃描儀的坐標系統主要涉及掃描儀自身坐標系(SOCS)、項目坐標系(PRCS)、全局坐標系(GLCS)以及相機坐標系(CMCS)。掃描儀自身坐標系是以儀器中心為坐標原點的站心坐標系,三維激光掃描所獲取原始點云數據的幾何信息(笛卡爾x、y、z坐標及極坐標S、θ、φ),以此坐標系為基準建立;項目坐標系是一個局部坐標系,用于將所有的掃描站點云數據拼接在一起,為工程獨立坐標系;全局坐標系是嵌入項目坐標系的坐標系,可將工程獨立坐標系數據轉換到項目所需要的正確坐標系統中,如轉換至2000國家大地坐標系。
地面激光掃描儀配備有方向傳感器,能夠獲得掃描儀測量平面(SOCS)和水平面之間的傾斜角度。安置地面三維激光掃描儀時,無需嚴格整平,此時掃描儀自身坐標系(SOCS)的XY平面不是標準的水平面(傾斜狀態);基于SOCS,通過圍繞掃描儀的X、Y、Z軸分別旋轉一定角度(r、p、y)形成變換矩陣,即可將SOCS 中的測量點云PSOCS轉換為XY平面為標準水平面的地理定向坐標系下的PENU(East-North-Up),PSOCS到點PENU的總轉換:
式中,RX(r)為圍繞X軸旋轉r角度為坐標轉換矩陣;RY(p)為圍繞Y軸旋轉p角度的坐標轉換矩陣;RZ(y)圍繞Z軸旋轉y角度的坐標轉換矩陣。
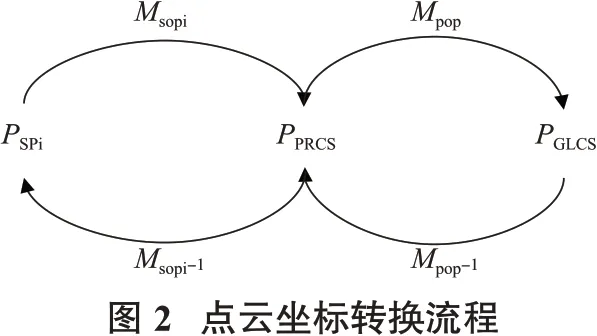
為獲得完整的數據集,掃描儀會基于多個不同位置開展掃描,每個掃描站都會記錄傳感器方向和位置信息(SOP),則PSPi轉換至PPRCS、PGLCS,只需要與其相對應的轉換矩陣(Msopi、Mpop)相乘即可,轉換流程如圖2所示。
1.3 影響精度的主要誤差
影響三維激光點云精度除了儀器誤差外,主要還有外界環境、目標反射物以及人為誤差。儀器誤差直接表現結果為距離測量和角度測量(水平角、垂直角)誤差;外界環境包括氣象條件(氣壓、溫度、濕度)、激光掃描不同的入射角等,不同材質、不同顏色和不同粗糙程度的目標反射物的反射率不一樣,直接影響測距;人為誤差主要包括數據獲取掃描設站的合理性所引起的點云拼接(配準)誤差。
2 RIEGL-VZ2000i掃描測量的精度試驗
2.1 RIEGL-VZ2000i技術參數
RIEGL-VZ2000i 為長距離地面三維激光掃描儀,系奧地利RIEGL 公司產品。RIEGL 公司采用獨特的全波形處理技術(回波數據化、實時波形處理、多波束收發處理),使得RIEGL-VZ2000i 可以在沙塵、霧、雨、雪等能見度較低的天氣也能進行快速、高精度、長距離地測量,在地形和礦山測量領域能夠得到很好地應用。RIEGL-VZ2000i 的主要技術參數如表1所示。

根據產品資料介紹,假設激光垂直入射目標物、激光亮度均勻、目標物表面平坦且面積大于激光束光斑以及大氣環境能見度為8 km(輕微霾)的情況下,RIEGL-VZ2000i 不同激光發射頻率的最大測量距離與目標反射率的關系見圖3。

2.2 試驗設計
試驗場地選擇位于位于四川西南的某露天金屬礦,礦區平均海拔3 730~4 100 m,開采區高差大、視野開闊,呈環形多級階梯式開發,場區滿足本次試驗對掃描距離和掃描俯仰角的設計需要。試驗設計了2 種型號的標靶,分別為60 mm×60 mm、180 mm×180 mm的正方形反射片,a型標靶粘貼在反射片支架并釘立在礦區實地或直接粘貼在墻壁使用,b 型標靶粘貼在500 mm×500 mm的正方形PVC板表面,作為移動標靶安置在礦區。標靶布設按照激光垂直、俯視、仰視3 種入射方式到標靶反射面的試驗需要,主要分布于礦山中、下、上層開采平臺。具體方案如下:
(1)根據標靶分布,利用RIEGL-VZ2000i 在設計的掃描站開展掃描,掃描模式選擇反射片,每一個掃描站獨立掃描3次。
(2)使用徠卡TS60高精度全站儀,以無棱鏡模式對標靶進行坐標測量(TS60 的測角精度0.5″,測距精度最高可達1 mm+1 ppm),每個標靶獨立測量3 次;為降低大氣溫度、壓力和濕度對全站儀測距結果的影響,將RIEGL-VZ2000i 自動獲取的氣象數據直接引入TS60,以保持氣象改正的一致性。
(3)采用華測i70(GPS-RTK)動態測量(標稱平面精度8 mm+1 ppm,高程精度15 mm+1 ppm)對掃描站點進行測量,以用于點云成果的坐標轉換。
(4)對三維激光掃描點云數據和全站儀測量數據進行整理,提取標靶中心點位信息[8],采用RiSCAN PRO軟件自動提取。
(5)將基于標靶提取的掃描儀觀測值和全站儀實測值進行比較,分別計算距離、平面、高程的中誤差,從內符合和外符合角度綜合評定RIEGLVZ2000i的單站掃描精度[9]。
(6)利用RIEGL-VZ2000i 和RTK 2 種不同測量方式對礦區地貌進行數據采集和土石方量計算,驗證RIEGL-VZ2000i 服務于礦區土石方量計算的可行性。
2.3 標靶掃描數據獲取和整理
掃描步驟為先粗掃描、再精掃描(水平角速度設置為0.004°),進而開展反射片的收縮掃描(水平角速度設置為0.001°)。反射片掃描在反射片上包含的點比全景掃描更多,采用RISCAN PRO 軟件可以對標靶中心(反射片中心)進行準確的模型估計,在基于SOCS 的TPL 中能夠獲得單站下的反射片識別數據(包括反射片類型、質量狀況、振幅、反射率、反射片中心至掃描中心的距離、反射片中心的平面坐標和極坐標信息)。反射片中心的檢核數據采用徠卡TS60高精度全站儀,以無棱鏡模式經3次測量取平均值作為最終結果,相較于三維激光掃描儀掃描精度而言,徠卡TS60 無棱鏡測量結果能夠滿足對三維激光掃描儀掃描精度的驗證。
2.4 三維激光點云精度
2.4.1 單站掃描測量精度
2.4.1.1 內符合精度評定
掃描儀在每一個掃描站測量多個測回,其內符合精度評定中誤差公式為
式中,lij為i標靶第j次的觀測結果,ˉ為i點n個測回掃描測量結果的平均值。
根據式(6)計算各標靶在單站測量下的內符合中誤差,同時對其測量距離比較接近的計算結果進行了平均值處理。本次試驗,三維激光掃描儀到目標標靶的有效掃描測量中,距離、平面、高程的內符合中誤差的精度統計結果見圖4。從圖4 中可以看出,在各種因素的綜合下,掃描距離500 m內,RIEGL-VZ2000i 三維激光掃描測量距離(S)的內符合中誤差位于0.005 m 左右(與儀器標稱的測距中誤差較為一致),平面分量(X、Y)的內符合中誤差位于0.010 m 左右,高程(Z)的內符合中誤差近0.020 m,隨距離變長,距離、平面、高程的內符合中誤差呈同步增大趨勢。

2.4.1.2 外符合精度評定。
基于三維激光掃描儀所布設標靶的掃描結果,將其直接測量的斜距折算為水平距離后與全站儀實測得到的水平距離進行比較(掃描儀激光中心和全站儀中心不一致,不能直接比較斜距),發現部分標靶的掃描距離和全站儀實測距離差值很大(表2),分析主要原因:①激光束非垂直射入標靶的反射面;②目標物表面不平坦且面積小于激光束的面積,從而導致三維激光掃描結果產生“彗尾”現象。如表2 中的Sp1-a6掃描,其標靶尺寸為60 mm× 60 mm,雖然通過增大掃描分辨率,三維激光掃描儀正確識別了標靶(反射片),但激光束在580 m 處的直徑約為156 mm(激光發散度0.27 mrad),標靶面積已經遠小于激光束光斑的面積,同時激光非垂直射入,光斑到達目標反射面為非圓形光斑,在投射至目標物時存有激光束部分截面提前到達礦山巖壁表面直接返回或延遲碰觸到其他表面才開始返回,激光測距的最終值則變成了多個截面測距的平均值,掃描測量結果就比真實值要小或大,故Sp1-a6 掃描結果的水平距離較全站儀實測差值達0.546 m。

表2中,標靶a6、a7、a8、b2、b5由于俯仰角過大,同時掃描站到標靶距離較遠,致使掃描結果和全站儀實測值比較差值很大。基于上述分析,試驗時進行了改進,即對a4(激光垂直入射至標靶表面)、a5(激光非垂直入射至標靶表面)2 個標靶在激光入射的標靶后方向設置擋板(采用500 mm×500 mm 的PVC板,較標靶距離0.1 m左右),然后對設置擋板前后分別掃描,結果見表3。

表3中,基于a4、a5標靶驗證目標反射面的大小和激光是否垂直入射對掃描結果的影響。試驗結果表明,在不考慮其他因素情況下,設置擋板和激光垂直入射對掃描結果更接近真值,即反射面的平整度、面積大小和激光是否垂直入射至目標反射面直接影響掃描結果的精度。
本次試驗標靶中,在排除激光束非垂直入射、標靶面積較激光束光斑過小的情況下,對標靶的正常掃描結果進行外符合精度評價,評定公式為
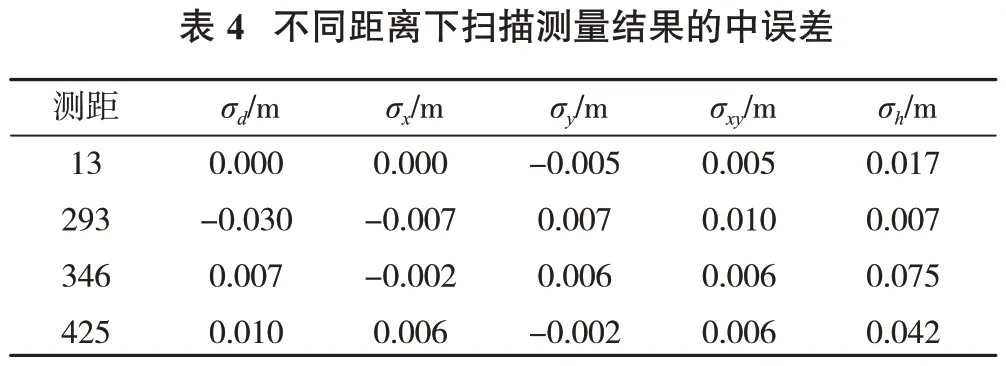
將各個標靶通過全站儀測量的結果視為真值,對掃描結果進行校驗,校驗前先將掃描儀基于PSOCS的點云坐標轉換為PENU,然后轉換至基于全站儀測量的坐標系[10-11]。通過對各標靶多測回數據取均值后,按照式(5)對水平距離、平面和高程進行外符合精度評定,結果見表4。根據表4在良好的觀測環境(激光束垂直入射、目標反射面積大于激光束光斑面積等)和測距500 m內,距離(d)、平面分量(x、y)的外符合中誤差位于0.010 m,高程的外符合中誤差位于0.050 m左右,具有較高的精度。
2.4.2 多站掃描點云拼接(配準)精度
多站掃描完成后,開展點云拼接(配準),點云拼接分為粗拼和精拼,粗拼主要有基于標靶的點云數據配準、基于幾何特征的點云數據配準和基于測站后視的點云配準處理[12]。在GNSS、慣性導航、陀螺儀等技術輔助下,三維激光掃描儀可以基于形狀匹配進行自動拼接,但這對站與站之間的三維激光掃描點云數據要求較高(提供更多的共面點云)。粗拼完成后開展精拼以改進掃描位置的配準,精拼主要采用迭代最近點算法(ICP 算法)[13]自動搜索對應點,在多次迭代中修改每個掃描位置的方向和位置,達到最佳整體擬合。
本次試驗在采礦區(面積0.7 km2,高差350 m)共完成了16站數據采集,覆蓋礦區整體范圍,粗拼基于形狀匹配并結合人工調整進行拼接,精拼后的誤差為0.009 m。大量經驗表明,若設站合理,一般拼接誤差能夠控制在毫米級。
2.4.3 點云轉換至全局坐標系(GLCS)
不同掃描位置所獲取的三維激光點云,經點云拼接(配準)后得到項目坐標系(PRCS)下的整體點云成果。針對測量需求,數學基礎一般為國家標準坐標系統或地方獨立坐標系,故基于PRCS 下的三維激光點云成果需要進行相應的空間轉換,以獲得所需求的全局坐標系下的成果。
掃描儀在不同位置數據采集完成后,可采用常規測量手段同步測量掃描儀激光對中地面點的坐標和高程(測站控制點),然后將地面點測量結果轉換至三維激光掃描儀器中心的坐標,利用各個測站點作為2 套不同坐標系下的公共點開展空間轉換。點云成果轉換至全局坐標系(GLCS)實則為約束平差,平差結果殘差的大小與所測站控制點的精度直接相關,如高海拔地區采用國家標準投影,利用RTK 所采集的數據經坐標反算所得距離與全站儀測量距離偏差很大(投影變形所致),坐標轉換將會發生較大的變形。實際工作中,應根據工作需求和規范要求,選擇合適的數學基礎,保證投影變形在允許誤差范圍內。
3 RIEGL-VZ2000i 在礦山土石方量勘測中的應用
三維激光掃描技術已廣泛應用于礦山開發的全過程管理中[14-16],將三維激光掃描測量應用于礦山土石收方是礦山勘測的進一步探索。傳統土石方量計算在數據獲取上主要采用RTK 均勻采點,為了保證土石方量計算結果的準確性,RTK 數據采集應滿足采點相應的精度和密度。隨著測繪新技術的應用,文獻[17]研究顯示基于無人機傾斜攝影測量的露采礦區土石方量計算結果較傳統RTK 實測的土石方量計算結果的相對誤差為6.1%,文獻[18]利用地面三維激光掃描儀和機載激光掃描儀分別獲取點云開展土方量計算,結果顯示二者相對誤差為7.2%。為進一步探究RIEGL-VZ2000i 服務于礦山開發土石方量驗收工作的適宜性和可行性,試驗中利用RIEGLVZ2000i 和RTK 2 種不同測量方式對礦區地貌進行數據采集和土石方量計算,并就計算結果開展方量比較,核定2種數據采集方法對方量結果的一致性。
掃描測站布設時,充分考慮掃描站至目標反射面的距離、激光較目標反射面的入射角、掃描站之間的共面重疊和三維激光掃描點云數據的可拼接性等,讓目標面至少有2 站的點云數據覆蓋,以保證點云數據的精度。掃描應保證所獲取的點云覆蓋全地表,避免空洞區域(如避免具有凹槽車道的開采平臺無點云數據),以避免所建立的不規則三角網地表模型不符合真實地表。原始掃描點云經拼接和配準后獲得礦山全局坐標系(GLCS)下的成果點云,通過對點云中的浮塵、車輛、行人等噪點信息進行過濾,利用Octree方法進行點云數據過濾和重采樣,創建數字高程模型,開展土石方計算,計算方法分別采用方格網法和三角網法進行驗證。
土石方計算的礦區范圍共選擇了2個礦區,分別是1#和2#,1#礦區面積215 302.00 m2,2#礦區面積44 751.70 m2,土方計算初期使用同一數據,方格網計算法的格網間距均采用2 m×2 m,2 個礦區的計算結果分別見表5。

通過三維激光掃描測量獲取礦區地表數據用于土石方量計算,計算結果與傳統RTK 測量方法的相對誤差在1.00%左右,三維激光掃描所采集的點云數據密度更高、更均勻,所建立的DEM 更符合真實地表。較RTK 實測而言,三維激光掃描工作效率高,作業勞動強度低,安全有保障,其精度能滿足礦山土石方測量的需要,三維激光掃描應用于礦山土石方量計算工作具有非常大的優勢。
4 結論
基于三維激光點云坐標測量和點云坐標轉換,以RIEGL-VZ2000i 長距離地面三維激光掃描儀為試驗設備開展了礦山勘測中的應用研究,本次試驗可以得出如下結論:
(1)RIEGL-VZ2000i 在良好的觀測環境和測距500 m內,單站掃描距離、平面位置、高程的內符合中誤差分別為0.005,0.010,0.020 m左右,隨距離變長其內符合中誤差呈同步增大趨勢;單站掃描距離、平面、高程的外符合中誤差分別為0.010,0.010,0.050 m左右,具有較高的精度,能夠滿足常規測量需求;若設站合理,多站掃描點云拼接(配準)精度能夠控制在毫米級。
(2)三維激光掃描測量的精度受多種因素影響,與激光的入射角、目標反射面的平整度和面積具有較大關系,主要表現在:①激光束非垂直射入目標反射面;②目標物表面不平坦且面積小于激光束的面積,導致三維激光掃描結果產生“彗尾”現象,產生很大的誤差。
(3)利用RIEGL-VZ2000i 進行三維激光掃描和RTK 實測2 種不同的方式進行礦山數據采集和土石方量計算,結果顯示二者的相對誤差為1.00%左右,其精度能夠滿足礦山土石方測量的需要,將三維激光掃描應用于礦山土石方量計算工作具有工作效率高、勞動強度低、安全有保障等優勢。
(4)應用長距離地面三維激光掃描儀開展數據獲取,應充分考慮掃描站至目標反射面的距離、激光較目標反射面的入射角、掃描站之間的共面重疊和三維激光點云數據的可拼接性等,建議將掃描距離控制在標稱測程的1/3~1/2,通過增加設站的方式讓掃描儀激光入射光盡量垂直照射至目標面,并且讓目標面至少有2站的點云數據覆蓋,以保證點云數據的精度。
(5)研究結果對長距離地面三維激光掃描儀的精度評定和項目生產應用提供了一定的參考價值,不足之處表現在受礦山生產的影響,試驗數據上稍顯有限,后續工作上應進一步改善研究條件對不同的目標反射面進行試驗,同時根據標靶在水平方向、垂直方向偏轉角度的不同,以及不同大小標靶對掃描測量結果的影響作定量研究。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
