
水平井輪式牽引器推靠機(jī)構(gòu)液壓系統(tǒng)研究與仿真
2023-02-24 05:21:32王金超張建偉白保鑫
機(jī)電工程技術(shù) 2023年1期
王金超,吳 偉,張建偉,白保鑫,邢 鑫
(西安石油大學(xué)機(jī)械工程學(xué)院,西安 710065)
0 引言
水平井技術(shù)誕生于20世紀(jì)后期并成功應(yīng)用于油氣工業(yè)中,成為油氣開采的主要施工方案。到2012年,我國已經(jīng)成功鉆探了2 300多口水平井[1]。水平井鉆井、測井過程中所需的儀器設(shè)備無法依靠重力下放到工作位置,需要依靠具有動力源的工具將鉆井、測井等儀器設(shè)備送到設(shè)定位置[2]。因此先后出現(xiàn)輪式牽引器、伸縮式牽引器、履帶式牽引器[3],根據(jù)動力源又可分為液壓驅(qū)動、電機(jī)驅(qū)動。液壓輪式牽引器兼具液壓式和輪式的優(yōu)點(diǎn),具有可靠性好、效率高、能夠適應(yīng)復(fù)雜的井下工況等顯著特點(diǎn)而被廣泛應(yīng)用。輪式牽引器為了增大牽引力、提高牽引器的越障能力,設(shè)計為帶有齒的驅(qū)動輪。齒形狀驅(qū)動輪的齒形磨損和壓潰導(dǎo)致牽引性能下降[4-5],因此需要對牽引器的牽引器力與外界負(fù)載相匹配合理的接觸正壓力值,驅(qū)動輪接觸正壓力源于液壓系統(tǒng)液壓缸的輸出特性。范強(qiáng)等[6]利用AMEsim對輪式牽引器的液壓系統(tǒng)進(jìn)行了定量分析,研究了不同流量下擺臂的運(yùn)動速度,但擺臂的穩(wěn)定時有較大速度波動大和沖擊。洪詩益等[7]利用AMEsim和Simulink聯(lián)合仿真對輪式牽引器推靠裝置的液壓系統(tǒng)進(jìn)行研究,得到模糊PID控制液壓缸的輸出具有更好的控制效果。但均未建立完整的機(jī)電液聯(lián)合仿真模型,對液壓系統(tǒng)輸出和驅(qū)動輪接觸正壓力之間的關(guān)系及結(jié)構(gòu)運(yùn)動學(xué)進(jìn)行研究。
針對此問題,本文根據(jù)液壓輪式牽引器的工作原理,建立液壓缸活塞桿位置和正壓力之間的數(shù)學(xué)關(guān)系,建立推靠裝置機(jī)電液聯(lián)合仿真模型,通過液壓系統(tǒng)的控制,研究分析牽引器的推靠機(jī)構(gòu)工作特性,驗證了液壓系統(tǒng)控制推靠機(jī)構(gòu)的合理性。
1 輪式牽引器驅(qū)動機(jī)構(gòu)原理
輪式牽引器驅(qū)動機(jī)構(gòu)如圖1所示,主要由驅(qū)動臂、推靠臂、鏈輪傳動、驅(qū)動輪、復(fù)位彈簧、壓力彈簧、錐齒輪組等部件組成。

圖1 輪式牽引器結(jié)構(gòu)組成
牽引器以液壓系統(tǒng)為驅(qū)動,液壓缸活塞桿移動壓縮壓力彈簧推動推桿軸向移動壓縮復(fù)位彈簧,推桿推動推靠臂傳遞動力給驅(qū)動臂,使得驅(qū)動臂繞固定點(diǎn)轉(zhuǎn)動直至驅(qū)動臂上驅(qū)動輪和套管接觸產(chǎn)生接觸力,通過控制液壓缸活塞壓縮位置對壓力彈簧的壓縮量控制接觸力大小。驅(qū)動輪接觸套管壁產(chǎn)生接觸力后液壓馬達(dá)工作,帶動錐齒輪組將驅(qū)動扭矩轉(zhuǎn)換到兩個驅(qū)動臂,驅(qū)動臂用鏈輪傳動傳遞扭矩到驅(qū)動輪,控制液壓馬達(dá)輸出轉(zhuǎn)向?qū)崿F(xiàn)牽引器前進(jìn)和后退。結(jié)束工作時,液壓馬達(dá)停止工作,液壓缸活塞桿收回,在復(fù)位彈簧的作用下收回驅(qū)動輪到初始位置。
驅(qū)動機(jī)構(gòu)液壓系統(tǒng)主要包含液壓缸、液壓馬達(dá)的控制,兩者為不同的回路且相互協(xié)同、獨(dú)立工作。本文對推靠機(jī)構(gòu)液壓系統(tǒng)進(jìn)行研究,研究液壓缸活塞桿位置控制下的推靠機(jī)構(gòu)特性和液壓系統(tǒng)輸出特性。
2 推靠機(jī)構(gòu)液壓系統(tǒng)力學(xué)建模
2.1 力學(xué)建模
構(gòu)建液壓系統(tǒng)的核心在于研究液壓系統(tǒng)的理論輸出特性,首要建立輪式牽引器驅(qū)動機(jī)構(gòu)的力學(xué)模型。根據(jù)圖1的推靠機(jī)構(gòu)原理,對模型進(jìn)行簡化以降低模型復(fù)雜程度,本文主要對驅(qū)動臂、推靠臂、復(fù)位彈簧、壓力彈簧進(jìn)行研究,建立力學(xué)分析如圖2所示。以驅(qū)動臂固定鉸鏈點(diǎn)為坐標(biāo)原點(diǎn)O建立x O y坐標(biāo)系,根據(jù)力學(xué)分析可以運(yùn)用虛功原理進(jìn)行計算。虛功原理:即對于具有理想約束的質(zhì)點(diǎn)系,平衡的充分條件是作用于質(zhì)點(diǎn)系的主動力在任何方向上的和等于零。
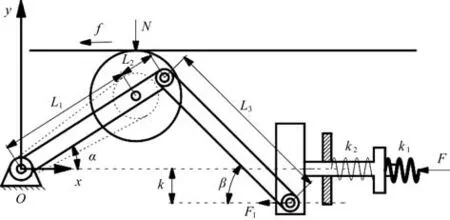
圖2 輪式牽引器驅(qū)動機(jī)構(gòu)力學(xué)分析
一組驅(qū)動機(jī)構(gòu)有兩組驅(qū)動輪,在力學(xué)建模時建立液壓缸輸出力和單個輪之間的關(guān)系。根據(jù)圖2中機(jī)構(gòu)的幾何關(guān)系,建立關(guān)系為:
式(1)中:
對式(1)兩邊求導(dǎo)可得:
根據(jù)虛功原理,N的方向與y軸方向相反,F(xiàn)1與x軸方向相反;可以得:
聯(lián)立式(3)(4)可得:
上述式(1)~(5)和圖2中,L1為驅(qū)動輪中心到O點(diǎn)的距離;L2為驅(qū)動輪中心到支撐臂和推靠臂鉸點(diǎn)的距離,L3為推靠臂的長度,α為驅(qū)動臂與x軸的夾角,β為推靠臂與x軸的夾角,h為推靠臂上彈簧偏離軸心的位置,k1為壓力彈簧的彈性系數(shù),k2為復(fù)位彈簧的彈性系數(shù),N為驅(qū)動輪和套管間的正壓力,F(xiàn)1為推靠臂的推力,f為單節(jié)驅(qū)動機(jī)構(gòu)的牽引力,F(xiàn)為液壓缸活塞桿推力。
2.2 液壓缸參數(shù)匹配
根據(jù)驅(qū)動機(jī)構(gòu)的工作原理可知,牽引器推靠機(jī)構(gòu)的行程確定包含兩部分:爬行器工作的管徑和爬行器施加的推靠力。工作管道確定的行程也就是復(fù)位彈簧的壓縮距離Δx2,即驅(qū)動輪在原始位置到接觸套管壁時的行程;爬行器施加推靠力的行程為Δx1,即產(chǎn)生最大接觸力時壓力彈簧的壓縮量,因此液壓缸活塞的理論行程為:
設(shè)爬行器停止工作時的驅(qū)動臂和水平方向的夾角為α′,則根據(jù)幾何關(guān)系可知:
主要由套管直徑、驅(qū)動機(jī)構(gòu)各構(gòu)建參數(shù)決定。液壓缸活塞桿的推力計算公式為:
聯(lián)立式(5)可以得到液壓缸活塞桿位置和接觸正壓力的關(guān)系為:
表1所示為牽引器驅(qū)動機(jī)構(gòu)參數(shù)[8]。本文設(shè)置推靠臂初始位置的夾角α′=15°。在理論分析的基礎(chǔ)上,利用Matlab數(shù)值分析對數(shù)學(xué)模型進(jìn)行求解,確定驅(qū)動輪和管道壁接觸時液壓缸的位移關(guān)系如表2所示。
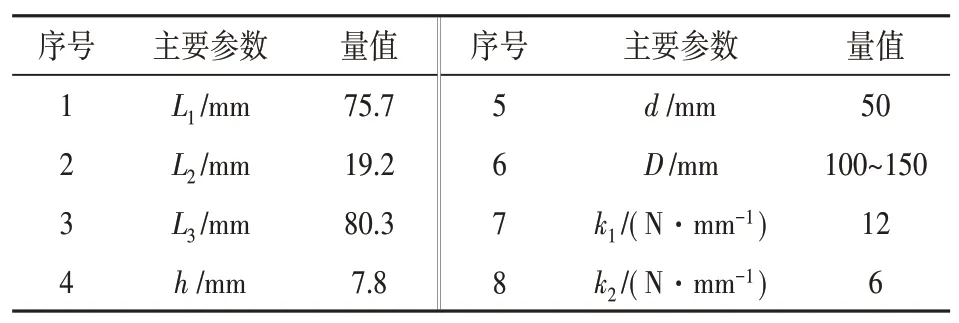
表1 輪式牽引器驅(qū)動機(jī)構(gòu)參數(shù)
表2 驅(qū)動輪接觸時相關(guān)位移關(guān)系mm
液壓缸活塞桿位置和接觸正壓力之間的關(guān)系如圖3所示。由圖可知,隨著管道直徑從100 mm增大到150 mm的過程中,爬行輪接觸管道壁開始產(chǎn)生正壓力的液壓缸活塞桿位移增加。100~150 mm管徑接觸套管壁后的直線斜率分別為:6.834、8.407、10.521、12.527、15.587、20.413,說明在套管直徑增大的情況下,壓力彈簧的作用力得到更好地放大。

圖3 液壓缸活塞位移與爬行輪正壓關(guān)系
國內(nèi)兩組驅(qū)動四輪牽引器最大牽引力大于4 000 N,因此單輪產(chǎn)生的牽引力大于1 000 N,驅(qū)動輪和管道間的摩擦因數(shù)μ=1.046[7],因此單輪和管道間產(chǎn)生的正壓力應(yīng)大于956 N。
根據(jù)圖3可知,在管道直徑為100 mm時,產(chǎn)生956 N的正壓力需要液壓缸活塞桿的壓力為1 712.8 N,取安全值2 000 N,則液壓缸有效工作面積為:
活塞桿受壓,液壓活塞桿受壓,取d′=0.6。得到D=22.6 mm。根據(jù)液壓缸內(nèi)徑系列選取規(guī)則取D=32 mm,液壓缸活塞桿直徑為10 mm,長度210 mm。
3 AMEsim-Simulik的推靠機(jī)構(gòu)機(jī)電液聯(lián)合仿真
為了分析液壓系統(tǒng)的輸出動態(tài)特性、提高系統(tǒng)的穩(wěn)定、研究牽引器的推靠機(jī)構(gòu)特性,本文對輪式牽引器進(jìn)行機(jī)電液聯(lián)合仿真分析。在AMEsim軟件中設(shè)置Simulink聯(lián)合仿真環(huán)境,Simulink中建立模糊PID控制模型,通過S-function函數(shù)調(diào)用AMEsim中的仿真模型進(jìn)行聯(lián)合仿真。
3.1 AMEsim機(jī)電夜仿真模型建立
在AMEsim軟件中,根據(jù)圖1牽引器推靠機(jī)構(gòu)的原理和表1中的參數(shù),運(yùn)用2D Mechanical庫搭建套管、驅(qū)動臂、推靠臂、推桿,利用移動副、旋轉(zhuǎn)副連接各構(gòu)件,設(shè)置驅(qū)動和套管間的接觸模型,在1D Mechanical中構(gòu)建壓力彈簧、復(fù)位彈簧;機(jī)電液聯(lián)合仿真模型如圖4所示[9-11],二維機(jī)械模型如圖5所示,為初始位置。液壓元件參數(shù)如表3所示。

表3 液壓元件參數(shù)
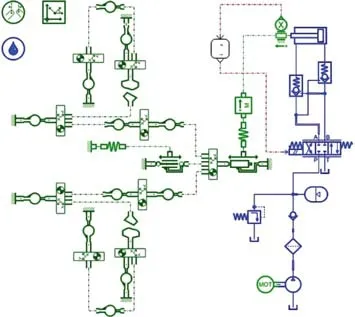
圖4 AMEsim軟件推靠機(jī)構(gòu)機(jī)電液仿真模型
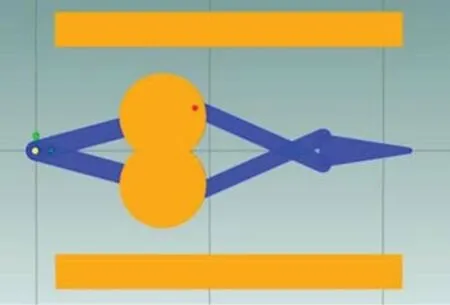
圖5 AMEsim推靠機(jī)構(gòu)二維機(jī)械模型
3.2 液壓系統(tǒng)模糊PID控制
(1)控制原理
如圖6所示,液壓缸活塞桿位置控制過程中,首先通過位移傳感器檢測液壓缸活塞桿的實際位置,實際位置和給定期望位置比較得到偏差信號,將偏差信號輸入到模糊控制器中,模糊控制器對PID控制參數(shù)進(jìn)行優(yōu)化,得到三位四通電磁閥的控制量,進(jìn)而調(diào)節(jié)液壓缸活塞桿的輸出位置[12-13]。
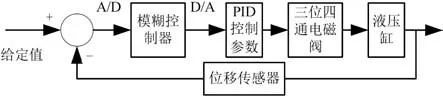
圖6 液壓系統(tǒng)控制原理
(2)液壓缸活塞桿位置模糊PID控制
模糊控制是以模糊理論、模糊語言變量和模糊邏輯推理的一種智能控制方法,核心部分為模糊控制器,控制規(guī)律由計算機(jī)的程序?qū)崿F(xiàn)。模糊控制器輸入變量為e(誤差)和ec(誤差變化),e的論域為[-1 1],ec的論域為[-1 1]。控制量ΔKp、ΔKi、ΔKd的論域為[-10 10]、[-5 5]、[-5 5]。當(dāng)液壓缸活塞桿位置發(fā)生變化時,模糊控制器可以實時監(jiān)測系統(tǒng)偏差e與偏差的變化率ec并持續(xù)修正Kp、Ki、Kd三個參數(shù),因此模糊PID控制具有良好的控制性能[14-16]。圖7為Simulink模糊PID控制模型。
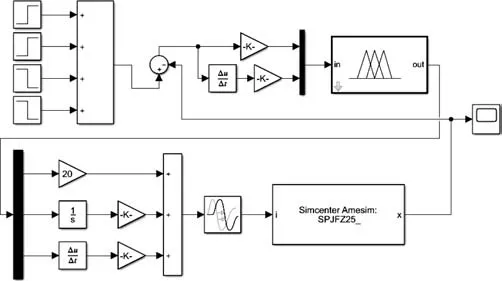
圖7 Simulink模糊PID控制模型
4 仿真結(jié)果分析
本文以直徑為120 mm的套管為例,驗證液壓缸活塞桿位置,通過控制液壓缸活塞桿的位置控驅(qū)動輪的接觸性能,液壓缸活塞桿理論輸出位置如圖8理論輸出所示。仿真結(jié)果如下。
(1)液壓缸活塞桿位置驗證
液壓缸活塞桿位置如圖8所示。由圖可知,通過對比理論輸出和實際輸出,模糊PID控制可以合理地控制液壓缸活塞桿的輸出位置,控制的核心在于盡可能地控制液壓缸活塞輸出的精度和穩(wěn)定性,適當(dāng)?shù)卣{(diào)節(jié)系統(tǒng)的響應(yīng)時間,避免驅(qū)動輪和套管產(chǎn)生過大的沖擊碰撞。通過圖8可知模糊PID控制下系統(tǒng)的響應(yīng)時間大約為7 s左右,穩(wěn)定后控制精度誤差為0.5 mm,符合控制要求。
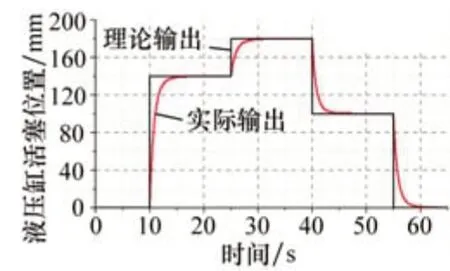
圖8 模糊PID控制液壓缸活塞桿位置
(2)驅(qū)動輪接觸正壓力驗證
驅(qū)動輪接觸套管的接觸正壓力如圖9所示。通過圖9并參考圖8可以看出,液缸10 s開始工作,經(jīng)過0.75 s驅(qū)動輪和管道壁產(chǎn)生接觸力,在17.5 s活塞桿處于140 mm位置對應(yīng)的正壓力為1 133.77 N,在32.7 s活塞桿處于180 mm對應(yīng)的接觸正壓力為1 548.34 N,在48.2 s活塞桿處于100 mm對應(yīng)正壓力為729.62 N,55 s開始活塞桿收回經(jīng)過1.04 s接觸正壓力為0 N。根據(jù)式(9)計算140 mm、180 mm、100 mm的理論接觸正壓力分別為:1 134.41 N、1 544.43 N、724.38 N,誤差分別為:0.64 N、3.91 N、5.24 N,驗證了通過控制液壓缸活塞桿位置控制接觸壓力的合理性。
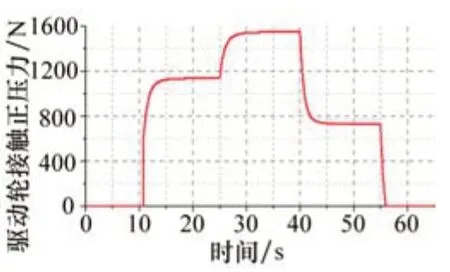
圖9 驅(qū)動輪接觸正壓力
(3)驅(qū)動臂、推靠臂運(yùn)動特性
驅(qū)動機(jī)構(gòu)驅(qū)動輪仿真過程中接觸套管壁如圖10所示,驅(qū)動臂相對轉(zhuǎn)角、轉(zhuǎn)速如圖11所示。從圖11中可以看出是上方位驅(qū)動臂,在10 s液壓缸開始工作后相對轉(zhuǎn)角逆時針轉(zhuǎn)動12.544°并持續(xù)保持穩(wěn)定,直至55 s后液壓缸活塞桿收回到0 mm時,由于復(fù)位彈簧的作用,驅(qū)動臂收回過程中,隨著復(fù)位彈簧彈力減小,收回速度降低。在此過程中驅(qū)動臂的最大轉(zhuǎn)速為-4.56 r/min。
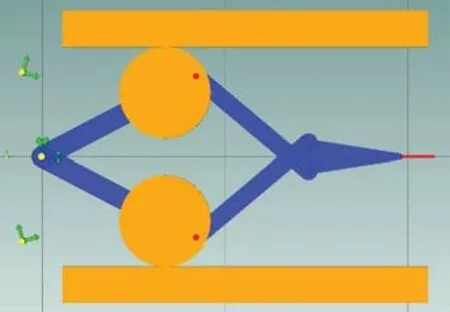
圖10 驅(qū)動輪套管產(chǎn)生接觸

圖11 驅(qū)動臂運(yùn)動特性
推靠臂相對轉(zhuǎn)速、轉(zhuǎn)速如圖12所示。從圖中可以看出是上方位推靠臂,在10 s液壓缸開始工作后推靠臂相對轉(zhuǎn)角順時針轉(zhuǎn)動16.3°保持穩(wěn)定值,直至55 s后液壓缸活塞桿收回到0 mm時,驅(qū)動臂的最大轉(zhuǎn)速為6.13 r/min,也不會出現(xiàn)過大的沖擊。
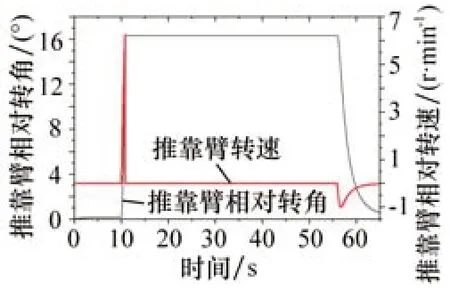
圖12 推靠臂運(yùn)動特性
5 結(jié)束語
本文針對水平井牽引器推靠機(jī)構(gòu),建立了驅(qū)動輪接觸正壓力和液壓缸活塞位置的數(shù)學(xué)模型,利用AMEsim和Simulink建立牽引器推靠機(jī)構(gòu)機(jī)電液聯(lián)合仿真模型,設(shè)計了模糊PID控制,對120 mm套管的工況進(jìn)行仿真分析,對比理論和仿真驗證了數(shù)學(xué)模型、控制模型和液壓系統(tǒng)的合理性并得到如下結(jié)論。
(1)根據(jù)驅(qū)動機(jī)構(gòu)的原理,建立100~150 mm管道下驅(qū)動輪接觸正壓力和液壓缸活塞桿位置之間的關(guān)系,在100 mm時要達(dá)到牽引力不小于4 000 N時液壓缸的最小輸入壓力為1 712.8 N,且驅(qū)動輪接觸正壓力隨著套管直徑的增大而增大,即在較大的套管中會產(chǎn)生更大的牽引力。
(2)通過AMEsim/Simulink建立了推靠機(jī)構(gòu)機(jī)電液聯(lián)合仿真模型,通過模糊PID可以準(zhǔn)確穩(wěn)定地控制液壓缸活塞桿位置,得到活塞桿輸出穩(wěn)定時位置誤差為0.5 mm左右,響應(yīng)時間大約為7 s。驅(qū)動輪接觸正壓力穩(wěn)定時最大誤差為5.24 N,驗證了通過控制活塞桿位置控制接觸壓力的可行性。
(3)通過對驅(qū)動臂、推靠臂的相對轉(zhuǎn)角和轉(zhuǎn)速分析,在液壓系統(tǒng)的驅(qū)動下驅(qū)動臂和推靠臂平穩(wěn)可靠,轉(zhuǎn)速較小,因此不會產(chǎn)生沖擊碰撞,驗證了控制的可行性。
