主動懸架用非均勻齒圓筒型永磁直線電機多目標分層優化設計
2023-02-27 13:19:00顏建虎李彪時巖張凌宇衡培然
兵工學報 2023年1期
顏建虎,李彪,時巖,張凌宇,衡培然
(1.南京理工大學 自動化學院,江蘇 南京 210094;2.南京理工大學 機械工程學院,江蘇 南京 210094)
0 引言
對于特種車輛而言,在作業過程中常會遇到惡劣的路面環境。在此情形下,車輛懸架系統高強度的振動會嚴重影響車輛的壽命和性能。懸架作為車輛的一個重要系統,可實現在車橋和車架之間力和轉矩的傳遞和由不平路面傳給車架或車身沖擊力的緩沖,并減少由此引起的振動,保證車輛平順行駛。傳統的懸架為被動式,該類懸架的剛度、阻尼系數在設計時就已確定,因此無法在不同車輛載荷、行駛速度和路面狀況等復雜多變的情況下作出快速、準確的響應[1-3]。為了解決上述問題,國內外學者和研究機構開展了主動懸架研究,現有的主動懸架主要有液壓、電磁等多種方式[4-7]。根據車輛行駛狀況,主動懸架必須實時、快速、準確地調整其阻尼和剛度,這就需要其有優越的響應性能。其中,電磁式相比于液壓式,具有結構緊湊、精度高、可控等優點,成為重要研究方向。
電磁式主動懸架的作動器主要為電機,現有的電機形式主要有旋轉電機和直線電機,前者因需要中間傳動機構而結構相對復雜,響應速度較慢,效率較低[8-9]。因此,采用具有更高效率的直驅式直線電機主動懸架成為電磁式的研究熱點。文獻[10]提出了一種雙定子無槽的懸架結構,將作動器直線電機的繞組與背鐵分離,由于動子不存在端部效應,且無背鐵質量,該電機具有推力波動小、加速度高等良好的動態響應和伺服特性。為進一步提高直線電機作動器的推力密度,國內外眾多學者對永磁直線電機拓撲結構開展了優化。文獻[11]分別針對內永磁動子和外永磁動子兩種不同的拓撲結構開展了比較分析,結果表明外永磁動子結構直線電機在軸向、徑向、Halbach 3 種充磁情況下的推力水平整體比內永磁動子電機的更高,但也伴隨著高溫升、高制造成本等不足。文獻[12]將容錯電機與主動懸架結合,提出了適用于車輛主動懸架的新型五相容錯電機,該電機定子的相鄰相位繞組本質上是獨立的,當其中一個相繞組出現故障時,剩余的相繞組仍可以持續運行,保證了車輛的可靠性和安全性。除了懸架的作動器結構,也可從優化控制算法出發,利用模糊控制算法、天棚控制算法、線性最優控制算法等有效降低車輛在路面上的車身加速度和懸架動撓度,從而減小作動器推力波動[13-16]。
由于圓筒型永磁直線電機(TPLM) 結構的特殊性,初級鐵心兩邊開斷使磁導率發生突變,從而產生邊端力,而鐵心的開槽又會產生齒槽力,從而引起推力波動,導致電機產生較大的振動、噪音和損耗,此外還會提升電機控制的難度,對主動懸架的性能產生不利影響[17-19]。針對直線電機推力波動大的問題,文獻[20]將電機進行初級分段,引入額外氣隙,并比較不同的極槽與不同的鐵心結構配合,研究表明當選擇合適的額外氣隙高度時可使電機的推力波動和損耗減小,并提升電機的輸出推力。文獻[21]通過對左右邊端力的頻譜分析和迭代,提出在初級兩個端部增加傾斜的輔助鐵,該結構會消除邊端力的二次諧波,同時降低其他高階諧波,由此減小波動。除了從初級結構入手外,通過改變永磁體的形狀也可改善電機波動。主流的永磁體拓撲結構有V 型、U 型等,文獻[22]在V 型結構的基礎上設計了一種截面類似于凸字形的Halbach 永磁體,該結構的感應電動勢幅值有所減小,但可明顯減弱其高次諧波和改善諧波畸變率,從而降低波動。
針對上述問題,本文基于車輛電磁主動懸架提出了一種非均勻齒結構的Halbach TPLM,對該電機的電磁尺寸開展了設計,分析了非均勻邊端齒結構對于電機性能的影響。將永磁體高度、徑向充磁長度、內部齒長以及邊端齒的削短高度和軸向長度作為優化因子,通過田口法觀察5 個參數對電機性能的影響程度。用響應面法進行多目標優化設計,構建一個連續的預測模型,并從該模型中選出一個最佳的設計方案。最后用此方案試制原理樣機并搭建了實驗平臺,驗證了本文所提拓撲結構及其優化設計方法的有效性。
1 TPLM 基本結構設計
車輛電磁主動懸架示意圖如圖1(a) 所示,主要包括上下端蓋、氣彈簧、軸承、動子連桿、墊圈、電機等部件。其中上端蓋與車身連接,動子連桿與車輪連接。TPLM 采用短初級、長次級的結構,圖1(b)給出了該電機的參數示意圖,其中,Hb為邊端齒徑向高度,He為邊端齒削短高度,Lb為邊端齒軸向長度,Lt為內部齒長度,Lp為定子長度,Ls為動子長度,δ 為氣隙高度,τp為一個極距長度,Lm為Halbach 徑向充磁長度,Hm為永磁體高度;Dδ為氣隙平均直徑。
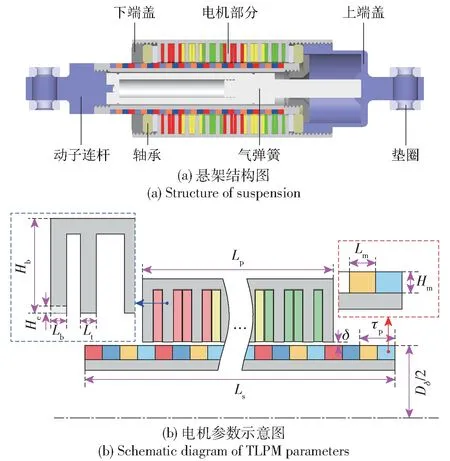
圖1 主動懸架示意圖Fig.1 Diagram of active suspension
通過對線控底盤動力學建模,并對懸架行程和減振器阻尼力進行有限元仿真,最終確定TPLM 設計目標如表1 所示。
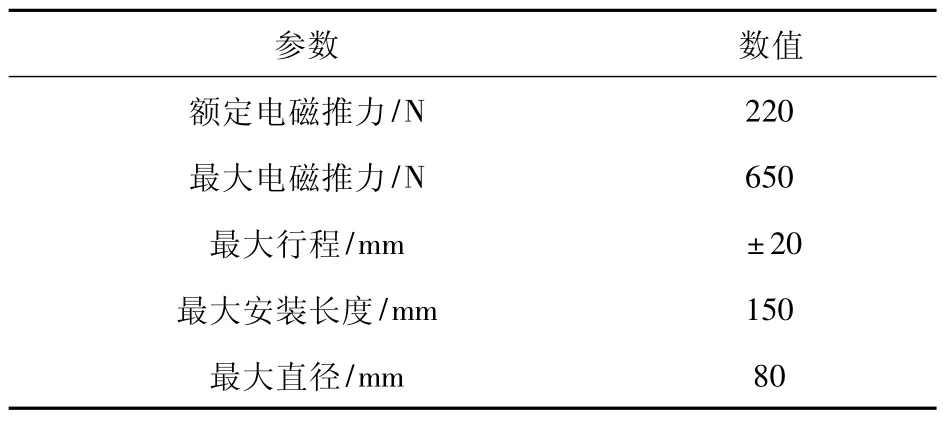
表1 TPLM 設計目標Table 1 Design objectives of TPLM
1.1 關鍵尺寸設計
TPLM 的關鍵尺寸通常是指初級內徑和初級縱向長度。對于直線電機,電負荷定義為
式中:m 為電機相數;Nc為電機每相繞組匝數;I1為定子相電流;p 為極對數。電機電負荷的選取一般由繞組的散熱情況和工作制決定,對于TPLM,一般可取30 000~80 000 A/m。
同理,磁負荷的定義為
式中:E1為感應電動勢;f 為電源頻率;Kdp1為繞組系數。磁負荷由永磁材料的剩磁和電機的磁路結構決定,根據經驗一般取值0.6~0.9 T。
由旋轉電機的功率公式可以類比得到直線電機的功率表達式:
式中:Fe為電機電磁推力;v 為電機速度;η 為電機效率;U1為電機相電壓;cosφ 為功率因數,φ 為功率因數角。
一般感應電動勢和相電壓會存在如下關系:
式中:(1 -ξL) 為壓降系數。
聯立式(1)~式(5),可得氣隙平均直徑的計算公式為
初級縱向長度Lp為
考慮到行程,次級軸向長度Ls的條件為
適合的極槽配合可減小氣隙磁密諧波,改善感應電勢波形,從而減小推力波動。相比于傳統的整數槽結構,分數槽可提高槽滿率、減小高次諧波。此外,分數槽還能與集中繞組相配合,進一步減少銅耗、降低成本和提高效率。本文設計采用12 槽10 極繞組結構,其示意圖如圖2 所示。
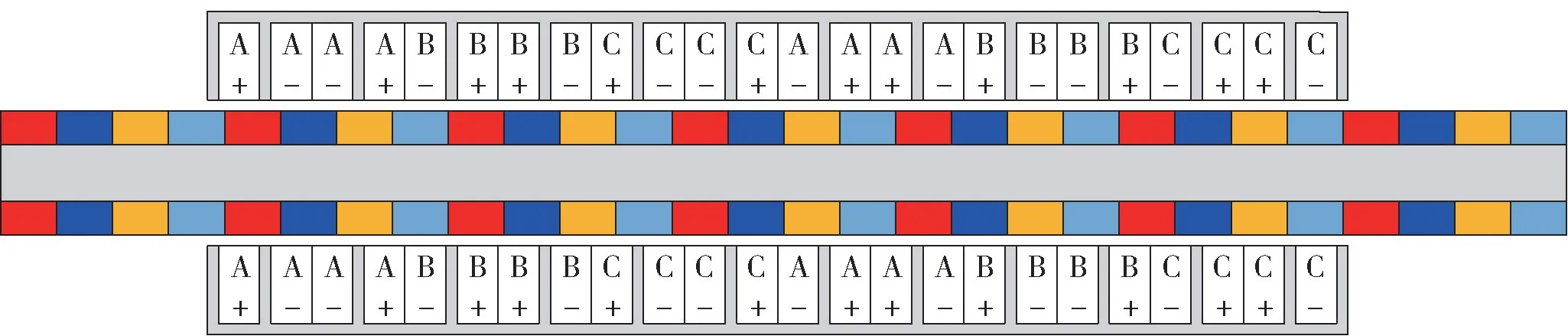
圖2 繞組配置示意圖Fig.2 Winding configuration modes
1.2 永磁體設計
為了提升主動懸架永磁直線電機的推力密度,需要永磁體具有較高的磁能積,從而提升電機的氣隙磁密,本設計選用N48SH 的永磁體材料,永磁體高度的計算公式為
式中:μr為相對回復磁導率;Br為永磁體剩磁密度;Bδ為氣隙磁密,且Br/Bδ一般取1.1~1.35。
永磁體的充磁方式有徑向、軸向和Halbach 充磁,Halbach 充磁相比于前兩個充磁方式具有較高氣隙磁密和較低的諧波,因此本文設計采用Halbach充磁結構。基于上述分析,初始電機電磁設計參數如表2 所示。
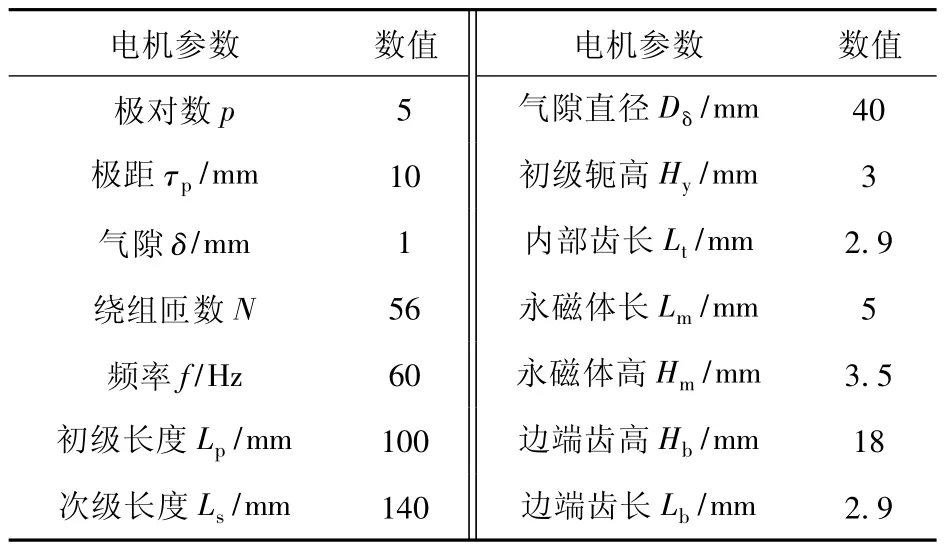
表2 初始模型的主要參數Table 2 Main parameters of the preliminary design model
2 初始模型分析
2.1 初始模型仿真
根據初始設計參數,利用ANSYS Maxwell 軟件搭建Halbach TPLM 電機的1/2 徑向切面二維有限元仿真模型。給定動子運動速度為0.6 m/s,分別對電機進行空載和負載仿真。圖3(a) 和圖3(b) 分別給出了電機空載時的磁密分布云圖和以最外側A 相繞組中心為坐標原點的氣隙磁密波形。從圖3中可以看出:電機定子齒和定子軛部磁密飽和程度設計合理;電機空載時的氣隙磁密幅值為1.24 T,有效值為0.72 T,滿足設計要求。
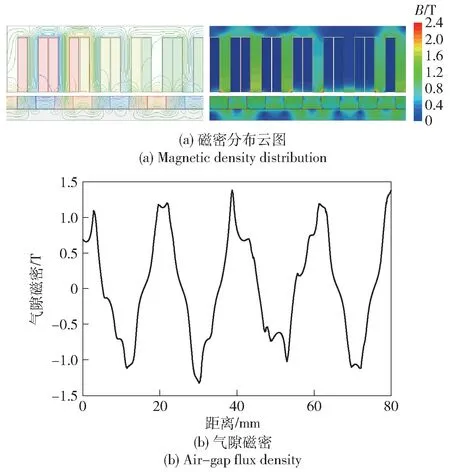
圖3 初始模型空載仿真結果Fig.3 No-load simulation results of the preliminary model
圖4 給出了電機直軸電流id=0 A 控制下的負載仿真波形,通過給定電流值12 A 來模擬電機的過載運行狀態。在實際運行情況中電機一般是變速運動,而在本文仿真中采用勻速運動對電機的運行狀態進行仿真,由此得到電機的平均推力Fe為604.5 N,最大推力達到658.7 N,最小推力為542.8 N,推力波動Fa為19.2%。
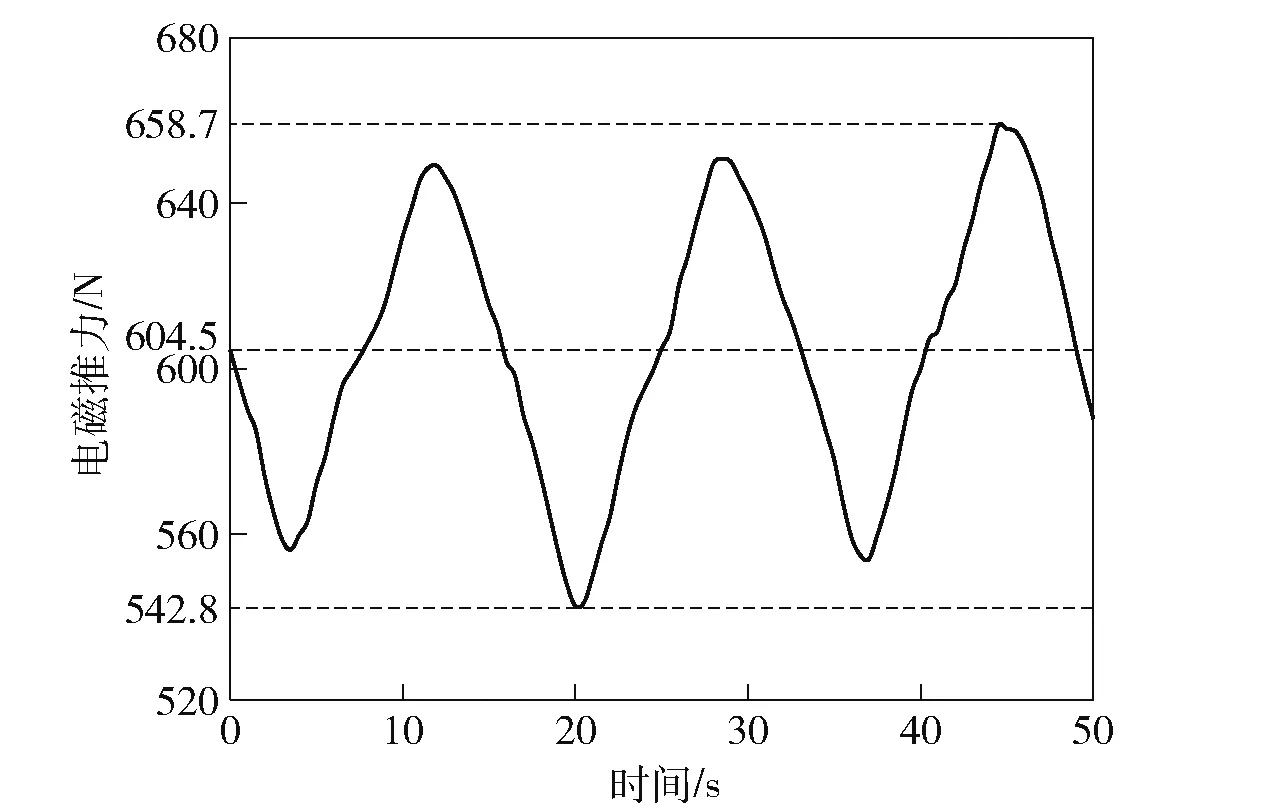
圖4 負載電磁推力仿真結果Fig.4 Simulation results of loaded electromagnetic force
2.2 邊端齒參數分析
TPLM 是橫向不開斷、軸向對稱的結構,電機縱向上的邊端效應是推力波動的一個主要影響因素。圖5 為電機定子的水平推力積分路徑。
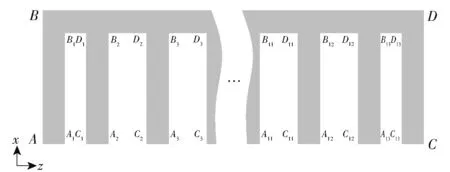
圖5 電機推力積分路徑示意圖Fig.5 Schematic diagram of motor force integration paths
則電機水平推力的表達式為
式中:ω 為TPLM 的圓周長度;μ0空氣磁導率;Bx、Bz分別為x 軸、z 軸方向上的磁感應強度。
定子上表面的積分路徑BD 磁通密度接近0 T,且齒部積分路徑CnAn+1(n 為小于齒數的任意正整數) 的磁通密度只存在徑向分量,因此有∫DBBxBzdz=,則
電機在空載時,邊端力的表達式為
由式(12) 可以看出,邊端力與電機的端部結構及其端部磁場分布有關,將邊端齒的削短高度He和軸向長度Lb作為要點,通過參數化分析不同He和Lb下電機的推力及其波動,結果如圖6 所示。從圖6中可以看出:隨著邊端齒的高度減少,推力先增加后減小,而推力波動則相反;邊端齒的長度增加后,推力略微減小,波動則先減小后增加。
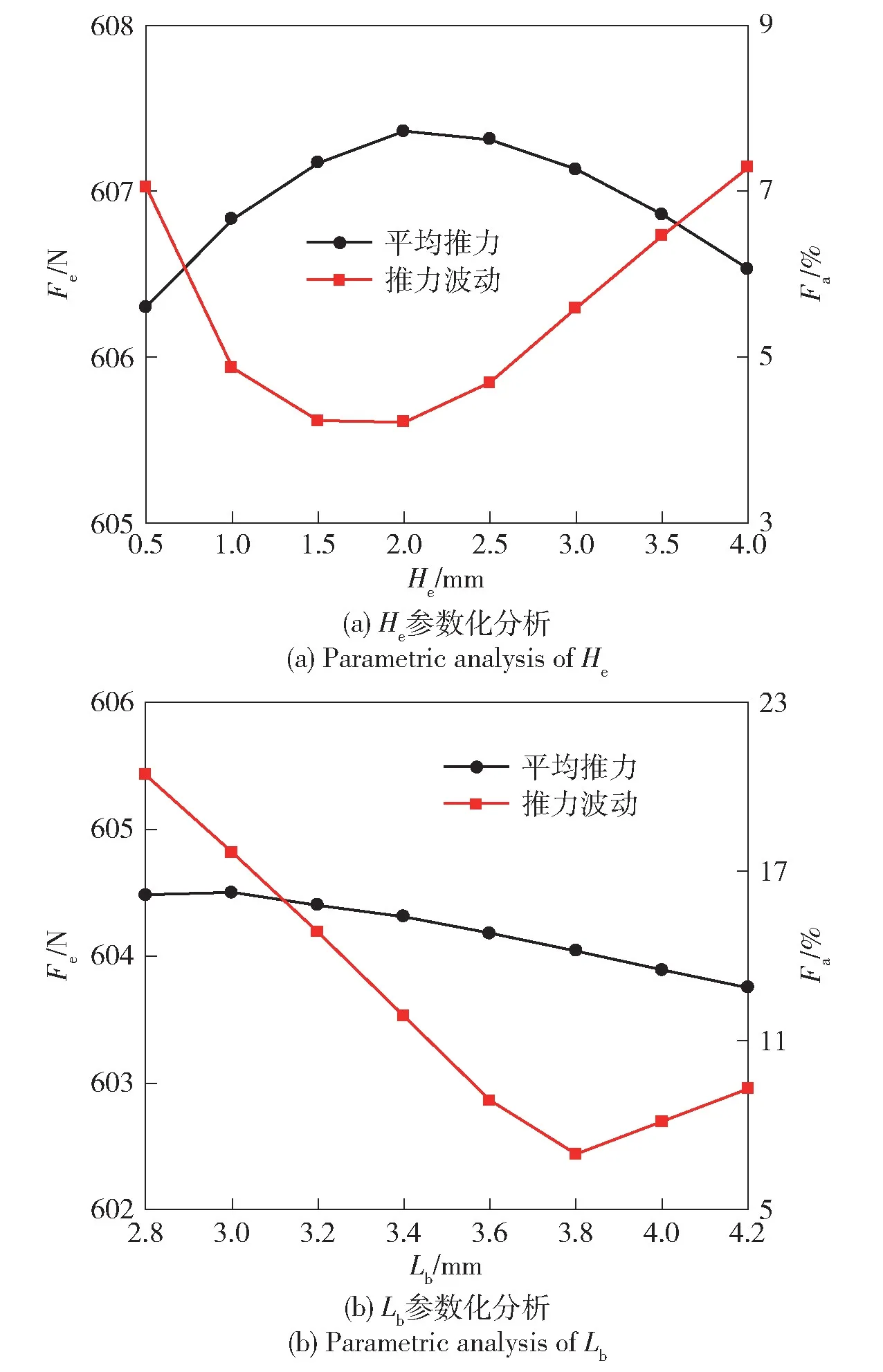
圖6 He和Lb的參數化分析Fig.6 Parametric analysis of He and Lb
將He、Lb兩個參數進行聯合分析,結果如圖7所示。從圖7 中可以看出: He和Lb變化時推力有先升后降的趨勢,但是變化較小;推力波動存在最小范圍,表明合理選取He和Lb兩個參數可提升電機性能,但僅僅通過這兩個參數難以得到電機性能最優值,因此需配合其他參數綜合優化分析。
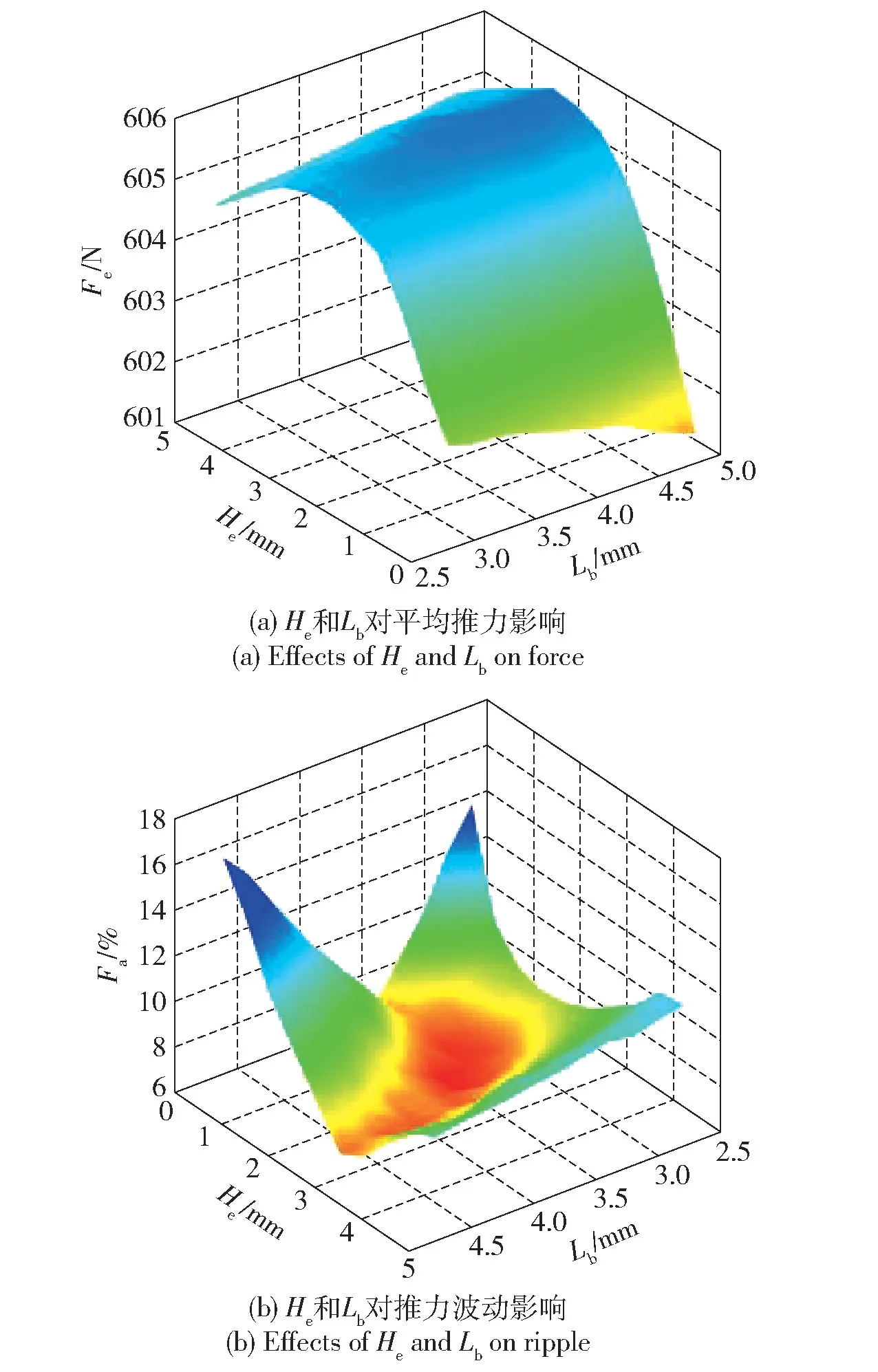
圖7 邊端齒對推力特性的影響Fig.7 Effects of end teeth on force characteristics
3 多目標優化設計
將2.2 節分析的He和Lb與內部齒長度Lt、永磁體高度Hm、徑向充磁長度Lm進行多目標分層優化,確定優化目標為平均推力Fe和推力波動Fa,要求在施加相同電流且永磁體、鐵心等材料用量變化較小的情況下平均推力最大且推力波動最小,優化目標函數如下:
為提高優化速度,采取田口法和響應面法,具體優化流程如圖8 所示。

圖8 優化流程圖Fig.8 Optimization flow chart
3.1 田口法
通過在田口法實驗中查看各個電機參數對電機性能的影響比例,在四水平中找出電機性能最佳時的水平,作為響應面法水平0 的參考值,用于建立響應面法模型。田口法因子水平如表3 所示,由此確定16 組實驗與結果,具體如表4 所示。
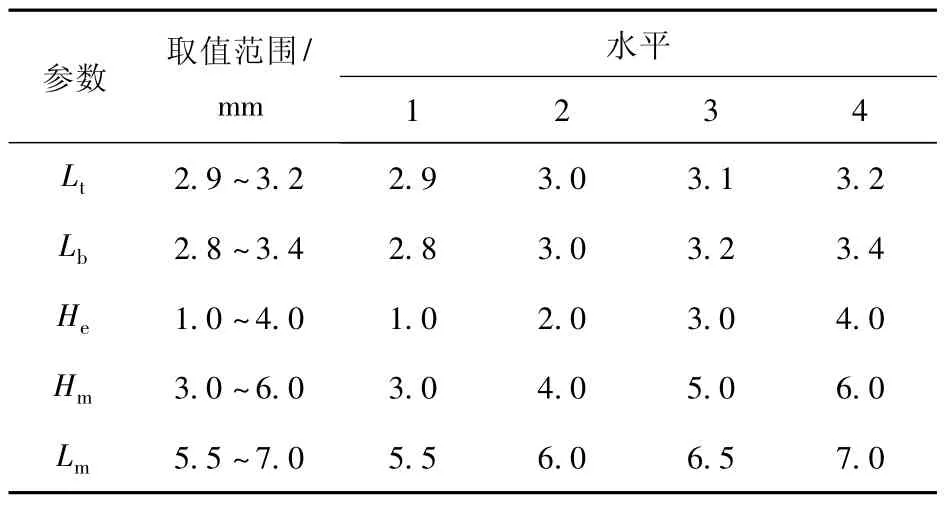
表3 田口法參數及水平Table 3 Parameters and levels of Taguchi method
為直觀地分析各因子水平對電機性能的影響情況,將表4 中各參數水平的平均值繪制成圖9 所示的分析圖。由圖9 可以看出: 隨著內部齒長度Lt增加,電機推力增大,在水平2 時推力波動最小,因此取水平2;邊端齒的軸向長度Lb對于平均推力沒有多大影響,但隨著水平數的增加,波動先減小后增加,在水平3 處推力波動達到最小,因此取水平3;邊端齒削短的高度He情況與軸向長度類似,且在5 個因子中對優化目標的影響最顯著,水平2 處波動最小,因此取水平2;隨著永磁體厚度Hm的增加,平均推力增大,在水平2 時平均推力已達到設計目標,但永磁體厚度增加會導致推力波動增大,并且也會導致電機體積增大,綜合考慮取水平2;永磁體的軸向充磁長度Lm對平均推力變化不大,波動先減小后增大,在水平3 處波動達到最小,因此取水平3。綜合上述分析,可得出各參數在性能最好時的取值為:Lt=3 mm;Lb=3.2 mm;He=2 mm;Hm=4 mm;Lm=6.5 mm。
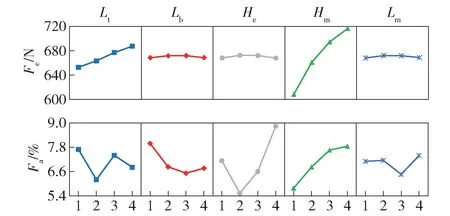
圖9 不同參數水平的平均值Fig.9 Average values of different parameter levels
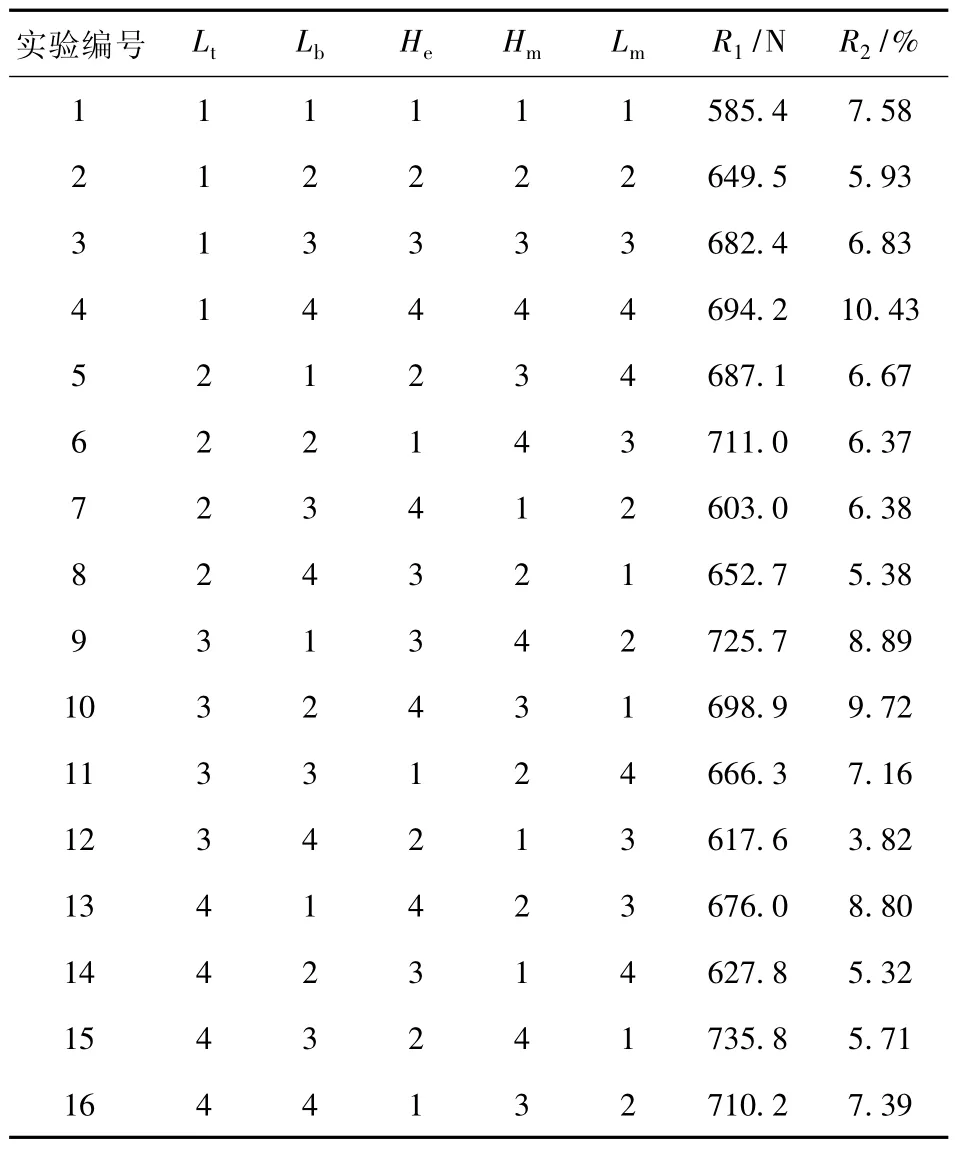
表4 田口法實驗及其結果Table 4 Taguchi experiments and results
表5 為各參數在R1和R2兩個優化目標中的方差及其比重,可以看出在影響推力的因子中,最大的是永磁體高度,比重達到90%;在推力波動的影響因子中,邊端齒的削短高度比重最大,其余4 個因子最小的也超過了10%。綜合考慮,選取該5 個因子繼續作為響應面優化因子。
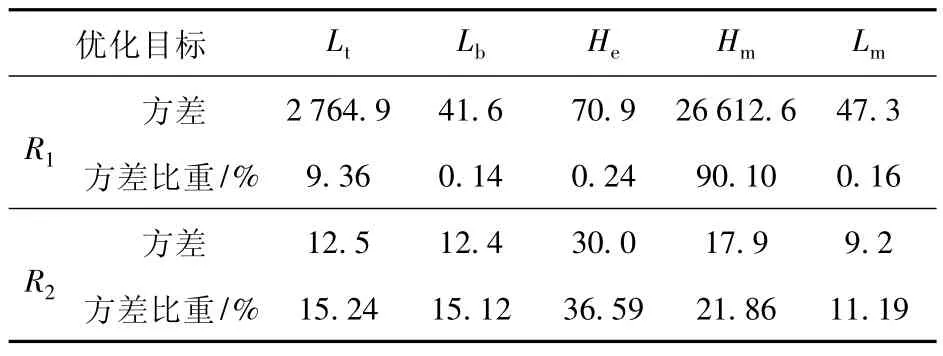
表5 田口法實驗結果分析Table 5 Experimental results using Taguchi method
3.2 響應面
本文選用響應面法中最常用的Box-Behnken 設計(BBD) 法。綜合3.1 節試驗所得的結果,繼續以Lt、Lb、He、Hm和Lm為響應面因子,以Fe和Fa為評價指標,根據田口法得出的最佳水平建立因子和三水平及實驗結果如表6 和表7 所示。
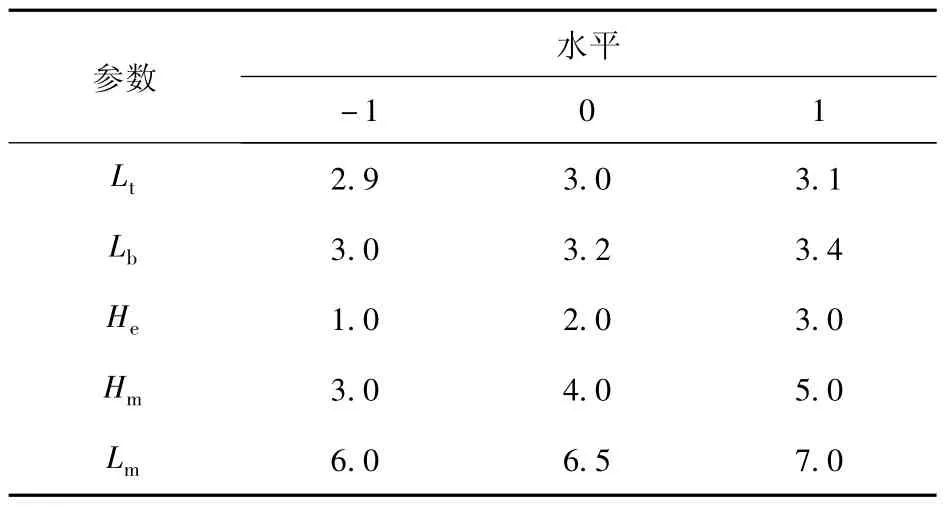
表6 響應面法參數及水平Table 6 Parameters and levels of RSM
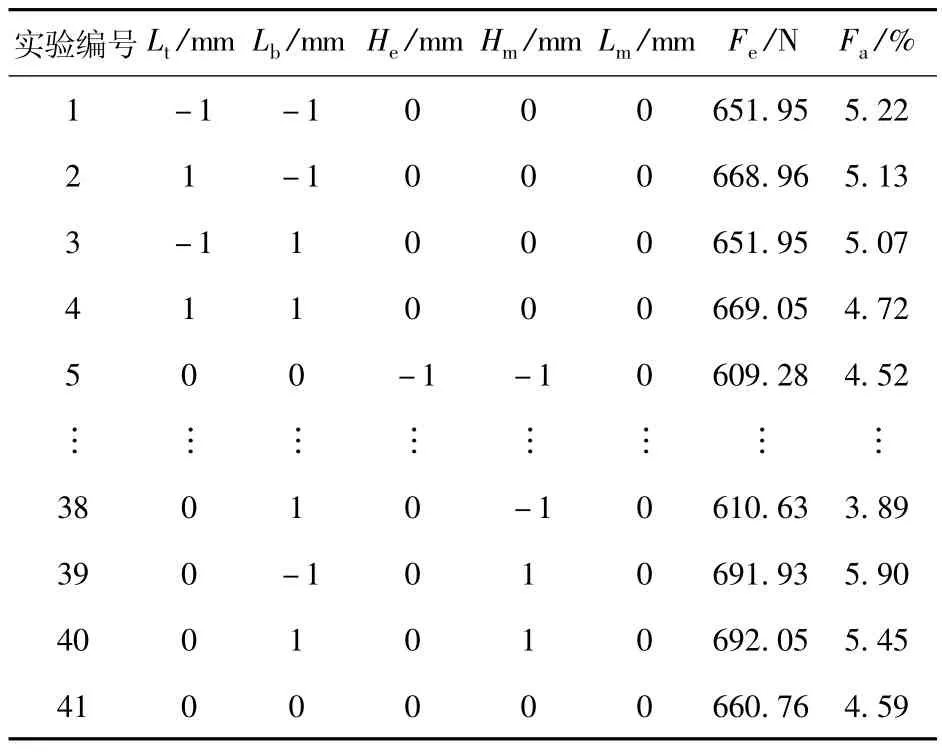
表7 響應面法實驗及其結果Table 7 RSM experiments and results
在響應面實驗中,為確定模型的可行性,需要先確定多元相關系數R2、模型P 值是否符合要求,在該模型中,R2分別為0.99、0.97,均接近于1,且P 值皆小于0.000 1,由此可知由BBD 法構建的模型可行。采用最小二乘法進行回歸模擬,得出Fe、Fa的二次多項式回歸方程式(14)、式(15),各參數之間交互情況如圖10(a) 和圖10(b) 所示,各參數交互較為顯著,該響應面模型具有合理性。分析可知,平均推力和波動在優化的過程中,當一個目標取得最優值時,另一個無法獲得最優值,表明各參數之間存在強耦合關系,在選取各參數值時需要結合電機情況進行權衡。
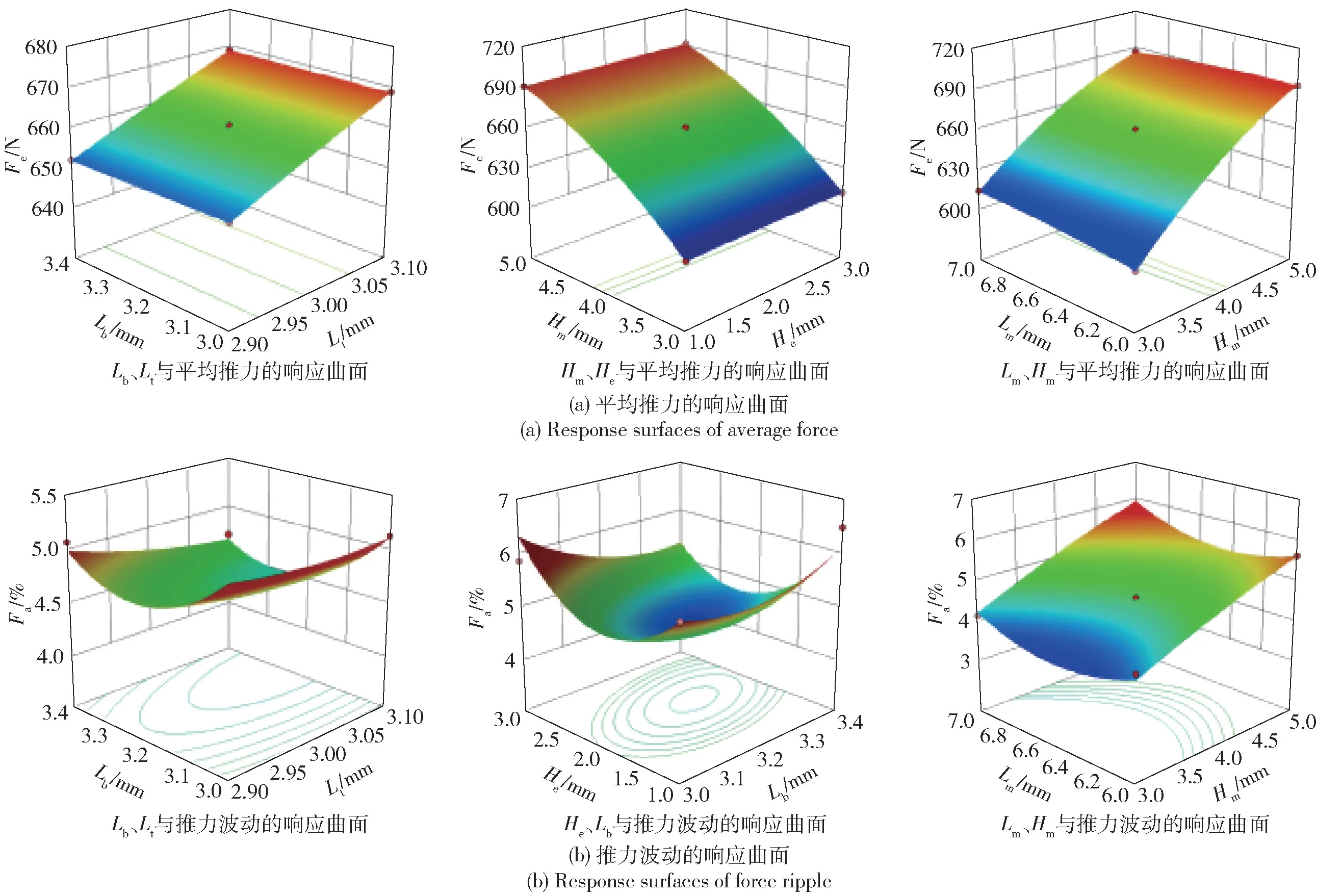
圖10 平均推力及推力波動的響應曲面Fig.10 Response surfaces of average force and ripple
3.3 優化結果與仿真
根據響應面法推薦的優化解決方案,結合表1的設計要求,在考慮加工精度、漆包線規格、最大可安裝空間等約束下,綜合選取出滿足要求、經濟性好的優化方案,如表8 所示。由圖8 可見,與最初設計方案相比,永磁體采用了徑向充磁長度6.4 mm、高度4.2 mm 的Halbach 結構,并將邊端齒加長0.4 mm,高度削短2 mm。
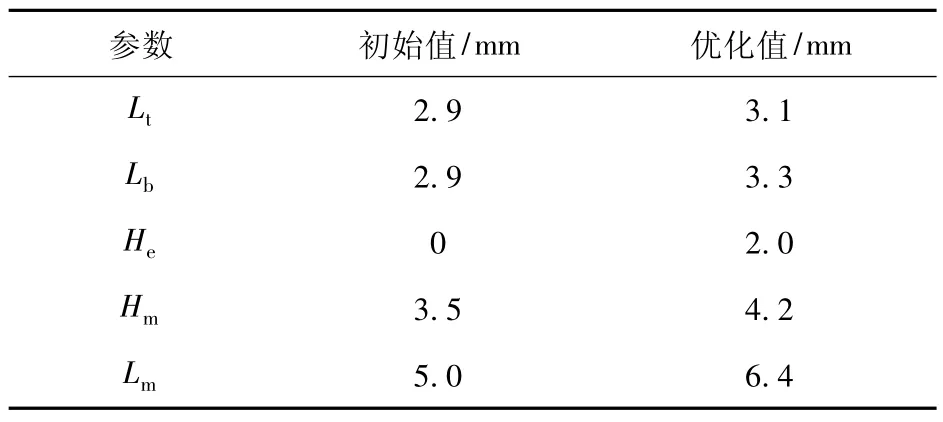
表8 優化前后參數對比Table 8 Comparison of parameters before and after optimization
根據上述優化參數搭建有限元仿真模型,對電機進行空載和負載仿真,圖11(a) 和圖11(b) 分別為空載和負載時與初始模型的定位力、電磁推力波形對比。由圖11 可看出,優化后的定位力最大值為30.8 N,平均推力為676.6 N,推力波動為4.5%,與初始模型的仿真結果對比,平均推力增加了11.9%,波動減少了76.6%,極大保證了電磁推力的穩定輸出,提高了懸架的輸出精度。
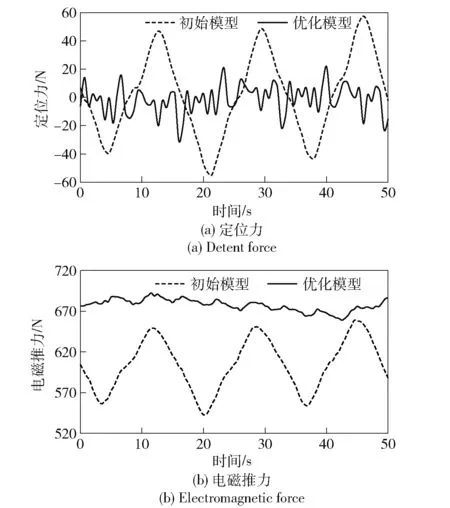
圖11 優化前后結果對比Fig.11 Results before and after optimization
4 樣機實驗
為了驗證本文所提電機結構及其優化設計方法的有效性,加工并制作了原理樣機,如圖12 所示。圖12(a) 為電機的定子部分,為了便于加工,定子采用模塊化鐵心進行疊裝。圖12(b) 為電機的動子部分,動子表面套有不銹鋼護套防止永磁體損壞。圖12(c) 為組裝后的電磁懸架,其中為了減小總體積,將霍爾位置傳感器裝在懸架內部,懸架的總質量為5 kg。圖13 給出了電機測試平臺,實驗設備除了樣機之外,還包括直流電源、驅動控制器、壓力傳感器、伺服電機及其控制器和示波器。其中,驅動控制器接直流電源,可向電機提供三相電流并實現電機定位功能;樣機、壓力傳感器、伺服電機固定在同一條軸上,伺服電機可間接給電機一個拖動的力使其勻速運動或固定不動;示波器用于顯示電機的空載感應電動勢、壓力傳感器的輸出值等。
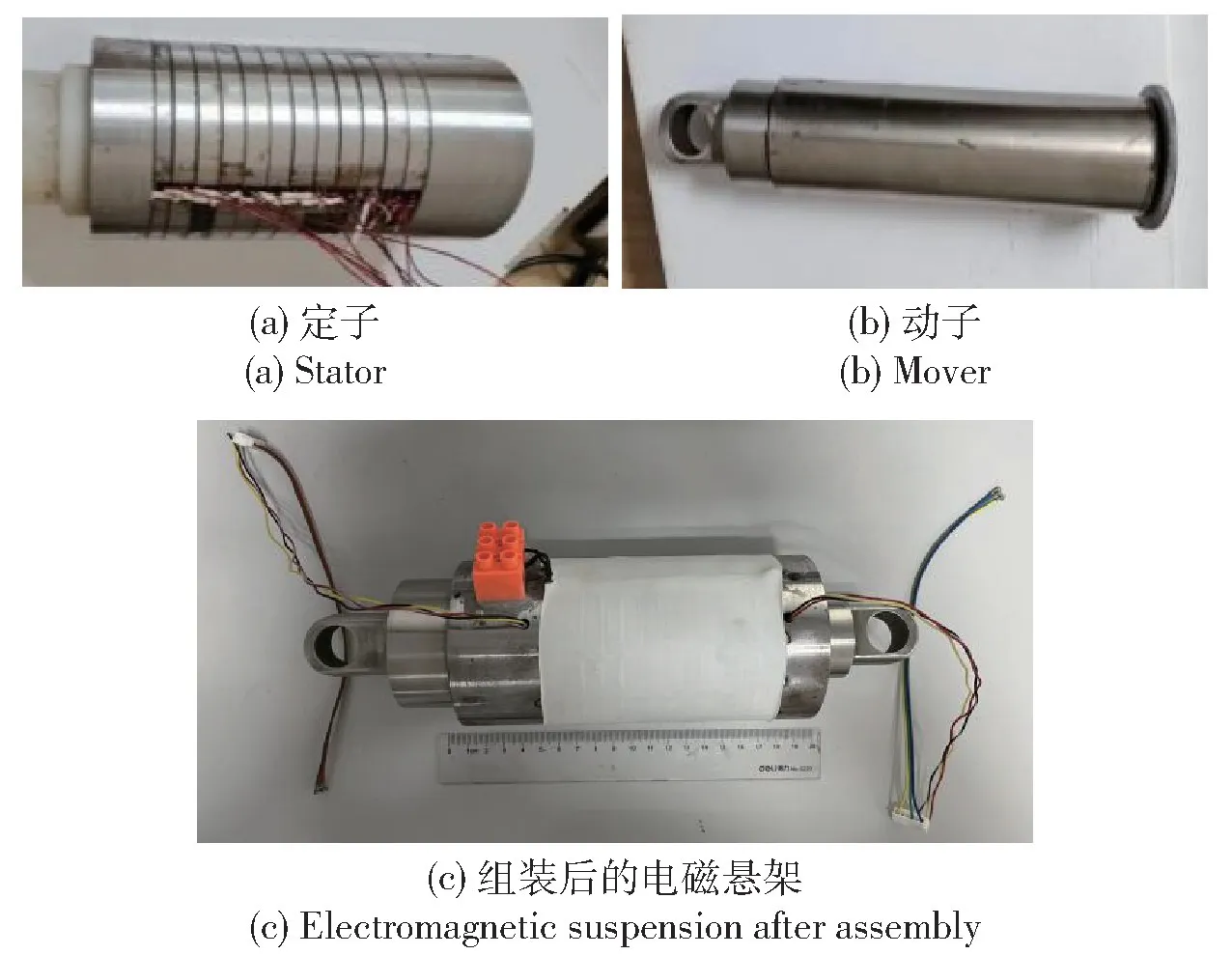
圖12 TPLM 樣機Fig.12 TPLM prototype
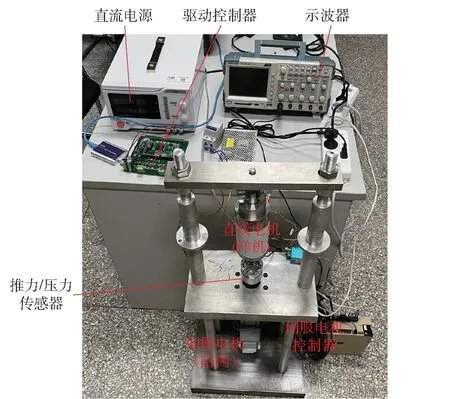
圖13 測試平臺Fig.13 Experiment platform
當測量電機空載感應電動勢時,控制伺服電機拖動TPLM 做往復運動,測得電機在不同速度下的空載感應電動勢。圖14(a) 為電機在0.6 m/s 時A、B、C 三相的空載感應電動勢及其諧波,圖14(b) 為不同速度下的空載感應電動勢。由圖14 可見:隨著速度增大,感應電動勢基本呈線性增加,在0.6 m/s 時值為15.8 V,與仿真的誤差為4.2%,感應電動勢波形諧波幅值均在0.4 V 以下。
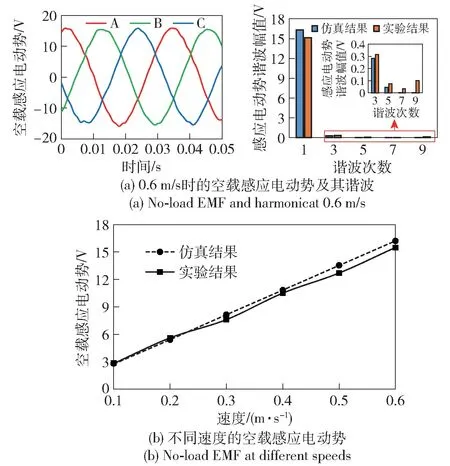
圖14 空載感應電動勢Fig.14 No-load EMF
當測試電機的靜態推力時,控制伺服電機不動,使整個裝置處于靜止狀態,此時壓力傳感器所受的力為電機動子的重力和電機的電磁推力,可通過壓力傳感器輸出值來間接測得電機在不同電流下產生的靜態電磁推力,結果如圖15 所示。由圖15 可見:隨著輸入電流的增加,電機的推力基本呈線性增大,與仿真結果有較好的一致性;當通入q 軸電流有效值12 A 時,電磁推力達到654 N,與仿真誤差為3.3%;當q 軸電流為4.05 A 時,電機達到額定推力,此時電機額定輸出功率為132 W,效率約為80%,符合最初設計指標。
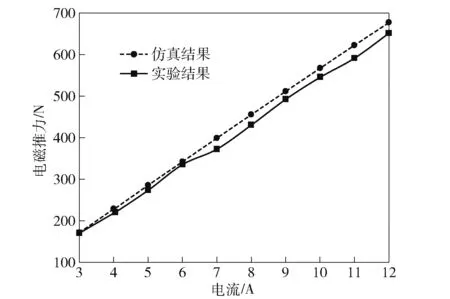
圖15 不同q 軸電流下的電磁推力Fig.15 Electromagnetic force under different q-axial currents
5 結論
本文針對直線電機式電磁主動懸架推力波動大、推力密度低的問題提出了一種非均勻齒結構的Halbach TPLM。通過對初級內徑、初級縱向長度、極槽配合、永磁體尺寸等開展電磁設計,并選取邊端齒的軸向長度和削短高度、永磁體高度和徑向充磁長度、內部齒的長度5 個參數作為優化因子,以推力最大、波動最小為優化目標開展多目標分層優化。根據優化結果選取最優參數,通過ANSYS Maxwell 建立二維有限元模型分別對電機進行空載和負載仿真。仿真結果表明,與優化前相比,電機的平均推力提高了11.9%,波動下降76.6%,驗證了本文設計的非均勻齒Halbach TPLM 的正確性和優化方案的有效性。在此基礎上,加工原理樣機一臺,并搭建實驗平臺對樣機開展空載和負載實驗,實驗結果與仿真結果基本一致,且電機的效率約為80%,符合設計要求。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
