一種輪腿復合型機器人的步態研究與越障性能分析
2023-02-27 13:20:32姜祎王挺邵沛瑤徐瑤邵士亮
兵工學報 2023年1期
關鍵詞:結構
姜祎,王挺,邵沛瑤,徐瑤,邵士亮
(1.中國科學院 沈陽自動化研究所機器人學國家重點實驗室,遼寧 沈陽 110016;2.中國科學院 機器人與智能制造創新研究院,遼寧 沈陽 110169;3.中國科學院大學,北京 100049;4.沈陽航天新光集團有限公司,遼寧 沈陽 110041;5.中煤科工集團沈陽研究院有限公司 煤礦安全技術國家重點實驗室,遼寧 撫順 113122)
0 引言
隨著機器人技術的不斷發展,機器人越來越多地代替人類來完成一些危險作業任務,各類特種機器人不斷發展,對性能的需求也在日益增長。現階段,地面移動機器人按照運動機構構型主要可以分為輪式、履帶式、足式、蛇形和復合型等[1]。通過研究發現,使用單一結構的傳統移動機器人難以滿足復雜地形下的高效運行,復合型移動機器人已然成為移動機器人技術研究的一個熱點方向。輪式機器人具有運動速度快、效率高、控制簡單等優勢,但越障能力較差,對地形環境的適應性不好[2]。相比之下,足式機器人具有較強的地形適應性和越障能力,但是控制復雜、承載能力不強,在非結構性環境中行走效率很低[3-4]。輪腿復合型機器人兼顧輪式機器人的快速性和足式機器人的強越障能力,在復雜地形中表現較好,在野外勘探、急救、安保等任務中有著較好的應用前景,具有較高的研究價值[5-15]。
根據復合方式可將輪腿復合型機器人大體劃分為以下4 種,如圖1 所示。
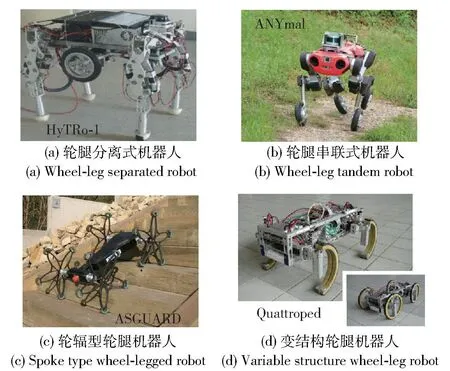
圖1 4 種輪腿復合型機器人Fig.1 Four kinds wheel-leg hybrid robots
1) 輪腿分離式:機器人同時具備輪結構與腿結構,兩種結構相互獨立,通過主動切換來適應地形環境。例如,中國科學技術大學HyTRo-I[6]就有四輪四腿,平坦地面時輪結構著地,實現高速運動,跨越障礙時使用腿結構將機器人主體支起。
2) 輪腿串聯式:輪結構通過機械腿和機器人主體相連。該類機器人通常將輪結構安裝在腿結構的末端或中間,通過控制電機來調整行進模式。例如,瑞士蘇黎世聯邦理工學院的四足機器人ANYmal[7]、騰訊Robotics X 實驗室的輪腿機器人Ollie[8]等。
3) 輪幅型輪腿:其結構由多個均勻分布的桿組成,通過軸部旋轉實現腿結構周期性接地[11]。單輪幅機器人近似足式機器人,當輪幅無限增加時則近似為輪式機器人。例如,美國凱斯西儲大學的Whegs 機器人[12]為三輪幅,越障能力較強但穩定性較差;德國人工智能研究中心的ASGARD 機器人[13]為五輪幅,犧牲了一定的越障性能但穩定性較好。
4) 變結構輪腿:該類機器人的輪腿結構能夠依靠自身結構的收縮和展開來切換行進機構,通常為輪結構與輪幅型輪腿結構間的切換。例如,臺灣大學提出的四輪變結構輪腿機器人Quattroped[15]以及韓國首爾科技大學提出的Wheel Transformer[16]等。
考慮到野外作業任務需求,需要機器人在兼顧運行快速穩定性和越障能力的條件下,盡可能保證機器人結構緊湊、控制簡便。輪腿復合式機器人與足式機器人相同,為保證機器人主體在行進過程中的穩定性應對其步態進行規劃,常見步態有對角步態、同側步態、跳躍步態等[17-18]。所使用的機構不同相應的步態也不同,機構的自由度越多步態的實現越復雜[19-21]。輪腿分離式和輪腿串聯式機器人的自由度較多,控制較為復雜;變結構輪腿需要主動切換來適應地形環境;輪幅型輪腿簡化了行進機構的自由度,通過驅動輪腿電機旋轉來實現各輪幅周期性交替著地,能夠被動適應地形環境,結構簡單更易控制。通過對前人所提輪幅型輪腿機器人的研究,發現輪幅數少時機器人行進效率較低越障能力強,輪幅數多時機器人的行進效率提高但越障能力減弱[11]。
針對戶外復雜環境中的探索需求,本文提出一種新的輪幅型輪腿復合機器人,主體采用四個六輪幅輪腿機構和全對稱結構,輪腿結構使用彈簧減震。與目前常見的三輪幅、五輪幅輪腿復合機器人相比,同樣具備一般戶外樓梯障礙的跨越能力,且運動時更為平穩,高速運動時性能更優。由于機器人的運動步態對其運行效率和越障能力也有較大影響,本文還進行了直行、轉向和越障等典型運動狀態下的力學分析和步態研究,并通過軟件仿真和樣機實驗測試了機器人的性能。
1 機器人結構設計
本文研究主要針對地面移動機器人在戶外復雜地形下的環境探索問題。為平衡機器人行進和越障的性能,本文選擇使用六輪幅輪腿結構。機器人整體結構如圖2 所示,4 個相同尺寸的輪腿結構對稱安裝在機器人機身兩側,通過大扭矩直流無刷電機進行驅動。機器人機身采用碳纖維材料,輪腿結構采用超硬鋁合金材料制成。單個輪腿結構如圖3 所示,1為輪轂結構,2為上部腿,3為套筒帽,4為下部腿,5 為彈簧,6 為橡膠墊,相鄰腿之間相位相差60°,電機帶動輪轂旋轉使得腿結構依次循環交替接觸地面。腿結構分為上、下兩個部分,上部直接固定在輪轂上,下部則通過套筒帽與上部相連。上部腿的行程腔體內設置減震彈簧,彈簧能夠起到緩沖吸振的作用,從而減弱機器人本體受到振動破壞的風險。下部腿直接著地的部分安裝了橡膠墊,增大與地面之間的摩擦力,同時避免金屬直接與地面接觸造成損傷。機器人基本參數如表1 所示。

圖2 六輪幅輪腿機器人整體結構圖Fig.2 Overall structure diagram of a six-spoke wheel-leg robot
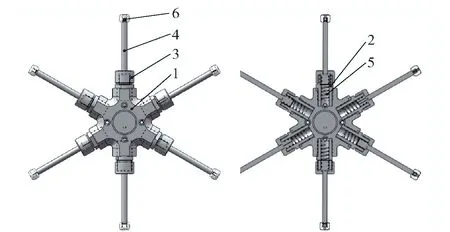
圖3 六輪幅輪腿結構圖Fig.3 Structure diagram of the six-spoke wheel-leg
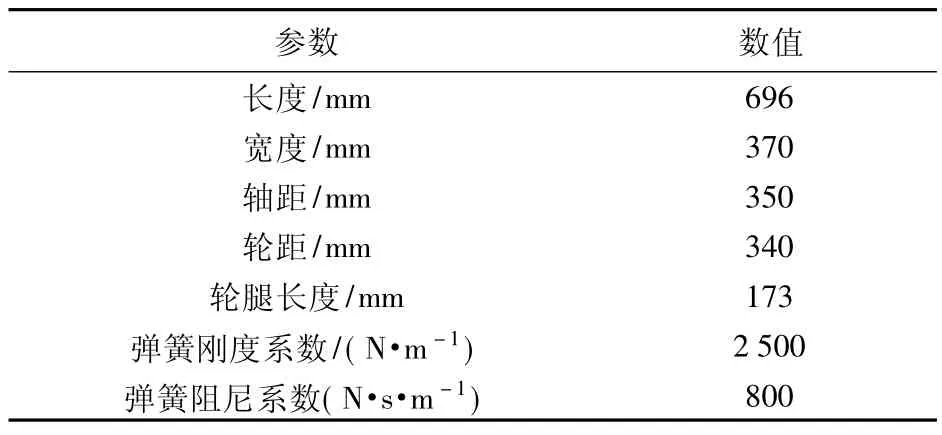
表1 六輪幅輪腿機器人基本參數Table 1 Parameters of the six-spoke wheel-leg robot
2 機器人步態分析
多足動物在運動過程中腿部以一定規律擺動并交替支撐身體完成運動過程,這一周期性現象被稱作步態。為了提升運動效率或節約能耗,多足動物在不同運動狀態下呈現出不同的運動步態。以四足哺乳動物為例,隨著運動環境和運動速度的不同,會切換不同的運動步態。如圖4 所示,步行時循環保持三條腿著地支撐身體緩慢移動;踱步時一側的兩條腿為一組交替支撐地面,速度提升;對角小跑狀態下對角線上的腳來回切換,速度和穩定性兼備;奔跑狀態下前側兩條腿為一組后側兩條腿為一組,交替著地高速前行,腿部騰空時間占比增加,出現空中飛行狀態。

圖4 四足動物步態Fig.4 Quadruped gait
類比四足哺乳類動物,輪幅型輪腿機器人也具備類似步態,大致可分為滾動步態、對角步態、同側步態和前后步態4 種,每種步態特性如表2 所示。如圖5 所示,對角步態下處于對角線上的輪腿為一組相位一致,同軸輪腿間有相位差;同側步態下機器人同側的兩輪腿為一組相位一致,同軸的輪腿間有相位差;前后步態下同軸的兩輪腿為一組相位一致,同側輪腿間有相位差;滾動步態則可看作是同側輪腿相位差為零狀態下的前后步態,四輪腿相位始終保持一致。
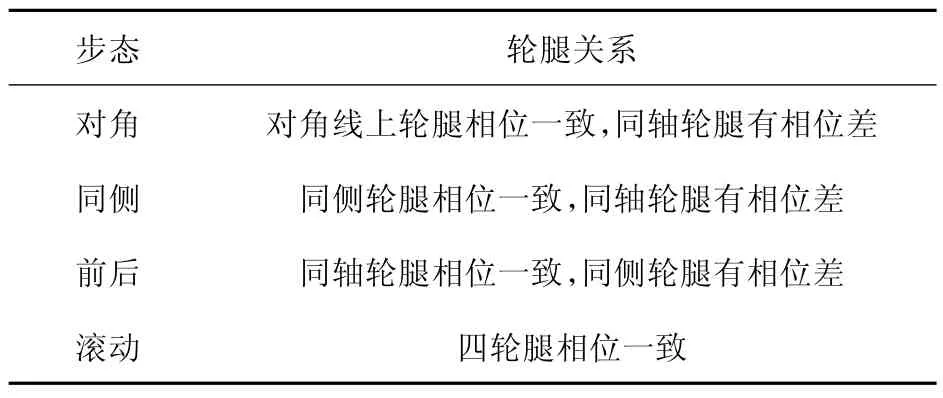
表2 機器人步態特征Table 2 Gait characteristics of the robot

圖5 機器人運動步態Fig.5 Robot gaits
進行步態的研究與規劃是保證機器人穩定運動的基礎,使得機器人在不同地形環境中實現前進、后退、定點轉向、奔跑、越障等功能。選擇合適的步態能夠在一定程度上提升機器人在運行過程中的穩定性,保護其內部各部分器件免受損傷,提升能源利用效率、降低內耗。在后文中,圍繞上述4 種步態進行研究,分析在不同任務狀態下的各步態的運動特性。
3 機器人直行和轉向性能分析
在對機器人進行直行和轉向分析時,主要考慮機器人的行進效率和穩定性,盡可能減輕運動過程中機器人振動帶來的影響。本節首先對單輪腿結構進行受力分析,討論本文提出的輪腿結構在一個運動周期內的狀態變化,隨后分別對機器人在直行和轉向任務中機器人4 種步態的特性進行分析討論,并選取合適的步態。
3.1 單輪腿結構受力分析
對于單個輪腿結構,其受力狀態是周期性變化的。輪腿著地時的狀態可以分為單腿著地和雙腿著地兩類,其中單腿著地又可以分為3 個階段。圖6所示為單輪腿結構接地的4 種情況下的受力分析。圖6 中,O 為輪腿中心,A 為輪腿OA 的末端,B 為輪腿OB 的末端,θA和θB分別為輪腿OA 和輪腿OB與豎直方向的夾角,MN和Mf分別為輪腿收到的支持力矩和摩擦力矩,T 為電機提供的驅動力矩;P和F 分別表示機器人主體對輪腿的作用力在水平方向和豎直方向上的分量;NA和fA為腿OA 與地面接觸點處地面對其的支持力的摩擦力,MNA和MfA分別為對應的支持力矩和摩擦力矩;NB和fB為腿OB 與地面接觸點處地面對其的支持力的摩擦力,MNB和MfB分別為對應的支持力矩和摩擦力矩。要保證機器人能夠正常的前進,則輪腿結構受力平衡時電機提供的驅動力矩為保證機器人能夠正常前進所需的最小力矩。
由于輪腿結構上部腿和下部腿間裝有減震彈簧,支撐腿的長度會隨著輪腿受力的變化而變化。彈簧主要為了滿足機器人高速狀態下的減震需求,剛度系數較高;在低速越障過程中,彈簧的實際變化范圍較小。因此在后續的理論分析過程中忽略彈簧形變導致的輪腿長度變化造成的影響,僅在仿真實驗中對其進行模擬。
狀態1:如圖6(a) 所示。輪腿結構同一時間僅有一條腿接地起支撐作用,當前的力平衡和力矩平衡公式如下:

圖6 單輪腿結構受力分析(左為輪腿受力模型圖,右為輪腿力和力矩平衡圖)Fig.6 Force analysis of a single wheel-leg (lift: the model diagram of wheel-leg force,right: the balance diagram of wheel-leg force and moment)
式中:lOA為接地腿OA 的長度。由式(2) 可知,該情況下輪腿結構所需的驅動力矩較大,進而會導致較大的瞬時電流,因此在機器人運動時應盡量避免出現所有輪腿同時處于該狀態的情況。
狀態2:如圖6(b) 所示,此時的腿結構直立著地,為狀態1 的接續狀態,也是狀態1 和狀態3 中間的一個臨界狀態。該狀態所需的平衡力矩相對較小,力矩平衡公式為
狀態3:如圖6(c) 所示,此時腿結構已經過狀態1 和狀態2 兩個狀態,擺動到輪腿結構重心偏后位置,此時的力矩平衡公式為
從式(4) 中可以看出,機器人在該狀態下前進時所需的力矩較小,因此可以考慮使用該狀態與狀態1 相結合的步態。
狀態4:如圖6(d) 所示,該狀態下輪腿結構有兩條腿同時著地,力平衡和力矩平衡公式如下:
相比于單腿著地情況,雙腿著地的狀態較為穩定,也更易于達成平衡。
3.2 直行步態分析
由于在不同的步態下機器人輪腿的著地狀態不同,機器人在一個周期內的姿態變化規律也不同。本節對于機器人直線行走時不同步態下的運動過程進行分析,忽略運動中輪腿結構旋轉造成的質心變化,定義機器人幾何中心為機器人質心位置。規定世界坐標系采用右手坐標系,x 軸朝向機器人前進方向,z 軸朝向豎直向上,坐標系原點O 位于機器人質心豎直下方地平面上,機器人初始位姿下左前輪腿處于圖6(b) 所示狀態。
機器人以滾動步態行進時,其運動周期內包含四個輪腿的受力均處于圖6(a) 的狀態,輪腿的瞬時電流峰值過大且變化范圍較寬。將輪腿電機旋轉角度和角速度表示為θ(rad) 和ω(rad/s),機器人質心在z 軸方向上的變化可表示為
式中:θ 為輪腿電機旋轉角度;k 為常數系數;l 為輪腿長度;z 為機器人質心在z 軸方向上的變化。對角步態、前后步態和同側步態將輪腿兩兩分為一組,兩組輪腿間相位相差30°,能夠避免所有輪腿同時處于圖6(a) 的狀態,從而有效減小輪腿瞬時電流的峰值。對角步態下,機器人質心在z 軸方向上的變化可表示為
前后步態下,機器人前后兩組輪腿中心到地面的距離交替變化,進而導致機器人主體存在繞y 軸轉動的情況。此時機器人質心在z 軸方向上的變化以及車身繞y 軸的轉動α 可表示為
式中:n 為常數系數;d1為前后輪間距;α'為特殊狀態下的機器人姿態角度,
同側步態與前后步態相似,機器人左右兩組輪腿中心到地面的距離交替變化,因而在行進過程中會繞x 軸方向轉動。此時,令左右輪間距為d2,機器人質心在z 軸方向上的變化以及車身繞x 軸的轉動β 可表示為
相比于其余3 種步態,滾動步態下機器人質心變化較為劇烈,質心變化的范圍較大。在以前后步態和同側步態前進時,機器人主體又分別繞y 軸和x 軸呈周期性轉動。綜合考慮下,在直行時選取對角步態機器人的性能表現更好。
3.3 轉向步態分析
本文提出的輪腿機器人不具備單獨的轉向機構,只能通過差速控制方式完成轉向。差速轉向時同軸的兩輪腿相位差始終在變化,不存在滾動步態,而對角步態和前后步態無法保證同組相位差始終為零。在差速轉向過程中,對角步態和前后步態無法維持,過程中會出現奇異步態,機器人質心變化和姿態變化幅度均會增加,轉向時輪腿著地的狀態不受控制,橫向摩擦力會造成輪腿電機電流增加,使損耗增大。綜上所述,本文提出的輪幅型輪腿機器人適合采用同側步態實現差速轉向,轉向過程中同側的兩輪腿狀態始終保持一致。
對于輪幅型輪腿機器人來說,控制輪腿驅動電機的轉速就是控制腿的速度。如圖7 所示,機器人采用同側步態,vL和vR為兩側輪腿速度,d2為機器人左右輪腿間距,x'、y'為機器人在P1位置處的機體坐標,x″、y″為機器人在P2位置處的機體坐標,機器人線速度和角速度可表示為
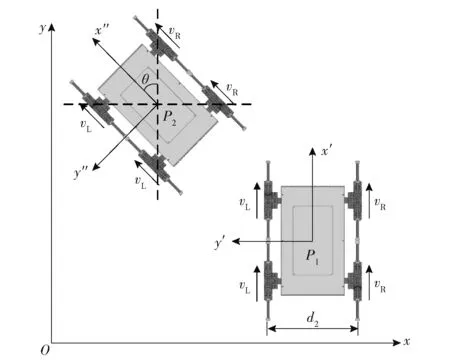
圖7 機器人差速轉向模型示意圖Fig.7 Schematic diagram of the differential steering model of the robot
將運動軌跡按照時間微分為多段直線,從位置P1運動到位置P2過程中,任意時刻i 的機器人位姿可使用線速度和角速度表示為
式中:xi、yi分別為機器人在i 時刻x 軸方向和y 軸方向上的坐標位置;θi為機器人在i 時刻的機身角度;Δt 為i 時刻和i-1 時刻間的時間間隔。
4 機器人越障性能分析
輪腿機器人的越障性能主要取決于輪腿的尺寸參數和路面的物理特性,本文將攀爬樓梯作為主要越障任務目標,先對單輪腿爬臺階情況進行受力分析,隨后對機器人爬梯采取的步態進行研究,并分析本文提出的輪幅型輪腿機器人的越障性能。
4.1 單輪腿結構受力分析
輪輻型輪腿結構在攀爬臺階時,其姿態是由輪腿的尺寸與臺階尺寸之間的關系決定的。對于本文提出的六輪幅輪腿機器人,攀爬臺階時的狀態可能為圖8 所示的4 種情況,圖8 中輪腿結構的狀態為剛開始執行爬臺階任務的臨界狀態,NC、fC分別為腿OC 與臺階接觸點C'處受到的支持力和摩擦力。
圖8(a) 狀態和圖8(b) 狀態均為腿OC 驅動爬臺階,圖8(a) 狀態中由于臺階較高在該臨界狀態下時腿OB 處于懸空狀態,此時力矩平衡公式為
在圖8(b) 狀態中的臺階高度下,腿OB 接地起到支撐作用,此時力矩平衡公式為
式中:lOC'為輪腿中心到腿OC 與臺階邊沿接觸點的長度。相比于圖8(b),圖8(a) 中的腿OC 受到的阻力更大,在臨界狀態時所需要的驅動力更大。
在圖8(c) 狀態和圖8(d) 狀態中腿OB 為爬臺階任務的驅動腿。由于臺階尺寸的不同導致腿OA狀態不同,圖8(c) 中腿OA 所受支持力起到阻礙輪腿前進的作用,此時力矩平衡公式為

圖8 單輪腿結構爬梯受力分析Fig.8 Force analysis of a single wheel-leg climbing steps
然而,在圖8(d) 中腿OA 所受支持力則起到促進輪腿前進的作用,此時力矩平衡公式為
臺階尺寸的不同導致了腿OA 狀態的不同,圖8(c) 中腿OA 所受支持力起到阻礙輪腿前進的作用,而在圖8(d) 中則起到促進輪腿前進的作用。
考慮攀爬臺階過程中的后續狀態,圖8(a) 和圖8(b)中腿OC 先是腿中部與臺階邊沿接觸,待到腿OC 將輪腿支撐起來后,才進入圖8(c) 和圖8(d) 中腿OB 的狀態,腿末端與臺階上平面接觸。綜上所述,目標臺階越高,單腿支撐前進所需的力矩越大、持續的時間越長,攀爬難度越高。當臺階高度大到一定程度時,則會超出輪腿攀爬能力范圍。圖9 所示為本文提出輪腿結構越障的極限狀態,通過計算得出忽略彈簧壓縮時其越障極限高度為1.5 倍腿長。在不考慮機器人車身與臺階之間的干涉情況時,高度低于該閾值的臺階可以通過,而高于該閾值的即使經過滑移也無法成功攀爬。
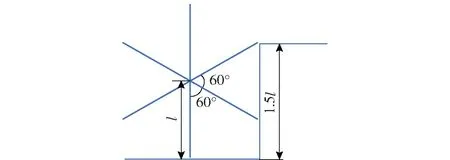
圖9 輪腿越障高度分析Fig.9 Analysis of obstacle-surmounting height of the wheel-leg
4.2 機器人爬梯過程分析
輪幅型輪腿結構與輪結構不同,輪腿爬臺階的狀態與臺階尺寸、輪腿與臺階間的位置關系以及輪腿當前的姿態都有關系。對角步態和同側步態在攀爬臺階時同軸的兩個輪腿存在一定的相位差,在其中一個輪腿開始執行爬臺階任務時另一輪腿仍處于其他狀態,機器人主體的姿態變化較為劇烈,對于攀爬臺階的穩定性存在不利影響。前后步態與滾動步態同為同軸輪腿相位相同的步態,然而在前后步態下前側輪腿和后側輪腿通常不會同時開始執行爬臺階任務。若一組輪腿能夠正常執行爬臺階任務或已經登上下一級臺階,而另一組輪腿進入了滑移狀態,則處于正常狀態下的輪腿組會因位置約束而產生滑移,進而導致其爬臺階任務的接續狀態發生變化或從已攀爬的臺階上跌落。這意味著機器人在前后步態下爬梯發生滑移的次數可能會增多,機器人能源損耗更大。因此,相較于其余步態,選取滾動步態來執行爬梯任務更為合適。
接下來對機器人采用滾動步態爬梯的過程進行分析。如圖10 所示,滾動步態下機器人爬梯狀態可以大體劃分為4 種。圖10(a) 和圖10(b) 狀態分別為前輪攀爬第一個臺階和后輪攀爬最后一個臺階。圖10(c) 狀態則是在樓梯中段,前后輪同時進行攀爬。在這3 種狀態下本文提出的輪幅型輪腿機器人均可順利爬上下一級臺階。然而在圖10(d) 狀態中,后側輪腿受到臺階豎直面的阻擋,進而導致機器人整體產生滑移,但在發生滑移之后機器人又恢復到圖10(c) 狀態繼續完成任務臺階的攀爬。
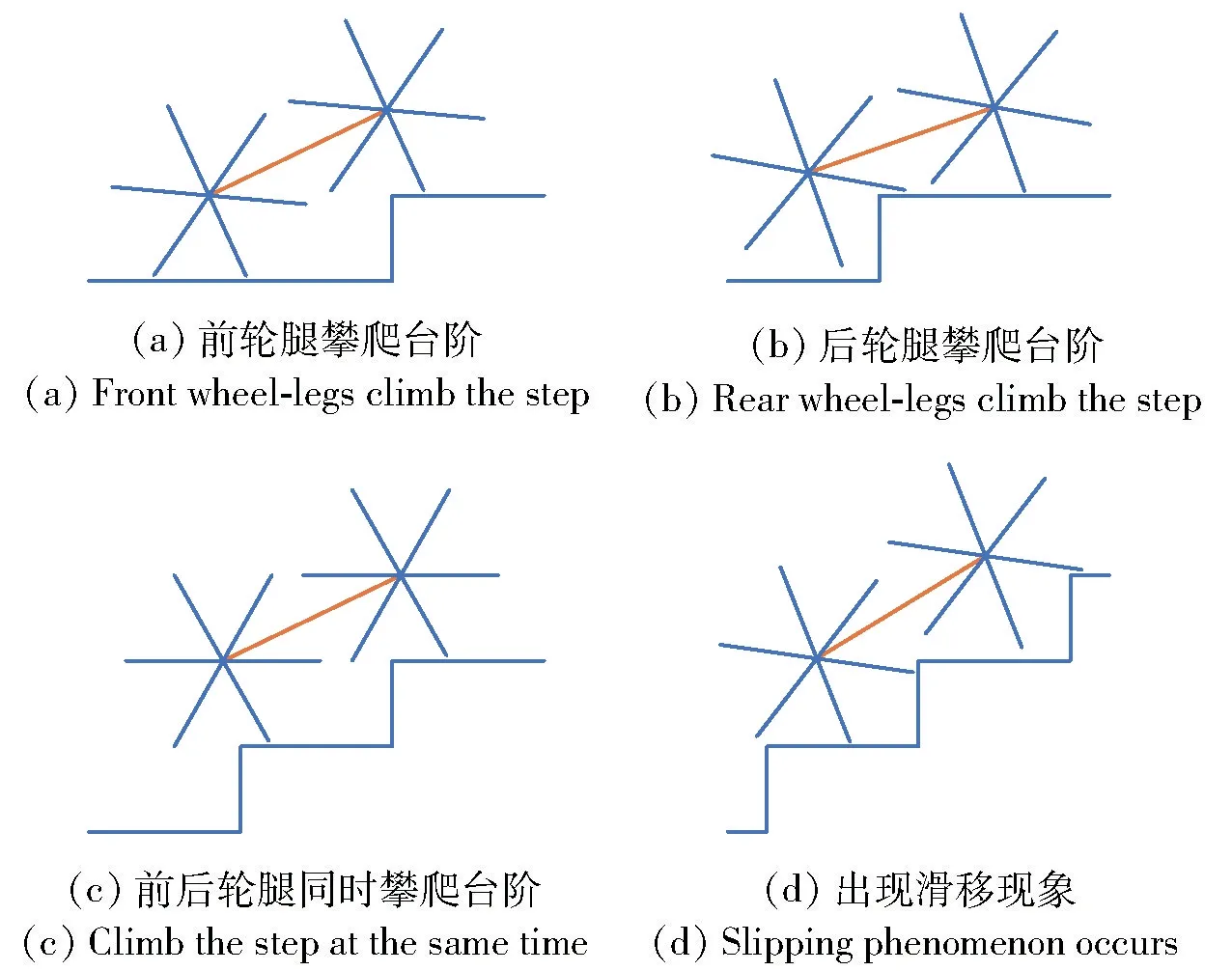
圖10 滾動步態下機器人爬臺階過程Fig.10 Robot stair climbing process under rolling gait
5 仿真和系統實驗
為說明上述研究分析結果的有效性,使用ADAMS 仿真軟件對機器人在水平地面上的運動以及臺階攀爬進行仿真,并搭建實物樣機進行實驗驗證。
5.1 不同輪幅數機器人水平地面仿真
為證實六輪幅的優勢,對三輪幅、五輪幅和六輪幅機器人進行仿真建模,分別測試機器人在對角步態下的直線行走,并繪制機器人的質心變化曲線。從圖11 中可以看出,隨著輪幅數的增加機器人的質心變化幅度逐漸減小,六輪幅在直線行走中的穩定性要優于三輪幅和五輪幅。后續的爬梯實驗則能證明本文提出的六輪幅能夠滿足常見規格臺階的攀爬。

圖11 對角步態下機器人直行質心變化曲線Fig.11 Robot centroid change curve of straight ahead under diagonal gait
5.2 機器人水平地面直行步態仿真實驗
采用ADAMS 仿真軟件對機器人在水平地面上的直行運動進行建模,并繪制出機器人在4 種步態下行進時的質心變化曲線和姿態變化曲線。由于在仿真實驗中模擬了輪腿彈簧,以及機器人受到慣性影響,仿真結果曲線與理論分析所得公式不完全一致,但結果趨勢和對比關系均保持一致。
從圖12 所示質心變化曲線中可以看出,滾動步態下機器人質心變化較為劇烈,對角步態、前后步態和同側步態相比于滾動步態機器人質心變化的范圍較小,該實驗結果與3.2 節中分析結論一致。

圖12 機器人直行質心變化曲線Fig.12 Cuve of the robot’s centroid change under straight walking condition
通過軟件仿真測量機器人在對角、前后、同側步態下的實時姿態,并如圖13 所示繪制機器人姿態變化曲線。在測量角度時,將坐標系人為規定為:車的前進方向為x 軸正方向,車體左側方向為y 軸正方向。由于在機器人前進過程中,輪腿狀態呈周期性變化,機器人受到慣性作用,在3 種步態下車身的俯仰角均具有一定波動。但從仿真結果來看,對角步態的姿態變化要小于前后步態和同側步態,機器人主體相對穩定,與3.2 節中分析結論一致。

圖13 機器人直行姿態變化曲線Fig.13 Curve of the robot’s attitude change under straight walking condition
5.3 機器人爬梯過程仿真實驗
使用ADAMS 軟件搭建機器人模型和樓梯模型進行仿真測試,驗證該輪幅型輪腿機器人攀爬樓梯的能力和穩定性。機器人模型的ADAMS 軟件仿真如圖14 所示,仿真實驗中輪腿與臺階表面的靜摩擦系數均設置為0.6。

圖14 機器人ADAMS 軟件仿真圖Fig.14 Simulation of the robot based on ADAMS software
首先,針對于滾動步態和前后步態進行爬梯性能比較,擬攀爬目標選取寬和高分別為W=270 mm和H=150 mm 的五級臺階。以滾動步態為例,機器人攀爬樓梯的過程如圖15 所示。圖16 為機器人在滾動步態下和前后步態下爬臺階過程中的質心變化曲線,其中前后步態的兩組輪腿相位差為7°。圖16中用虛線框出的兩處曲線抖動為4 個輪腿一同攀爬臺階所致,在這種情況下滾動步態質心軌跡與樓梯的輪廓間所夾面積較小,重合度較高,說明該步態下機器攀爬臺階的穩定性較好。此外,兩種步態下機器人在臺階上時都發生了幾次滑移,前后步態下機器人發生滑移時車身姿態變化較大,當前側輪腿與后側輪腿相位差較大時滑移次數增多攀爬難度增加,還可能會出現車身后翻的情況,能夠完成臺階攀爬的相位差范圍與臺階尺寸和機器人尺寸相關。

圖15 機器人爬臺階仿真圖Fig.15 Simulation of the robot climbing stairs

圖16 機器人爬臺階質心變化曲線Fig.16 Curve of the robot’s centroid change when climbing stairs
隨后,對本文提出的輪腿機器人越障能力進行進一步驗證,通過軟件仿真模擬出不同尺寸的樓梯環境,使用滾動步態進行可通過性測試。室外臺階高度通常不超過175 mm,寬度在260~350 mm 之間,且高寬比不宜大于1∶2.5,在該范圍條件內選取幾組臺階尺寸組合進行測試,測試數據見表3。
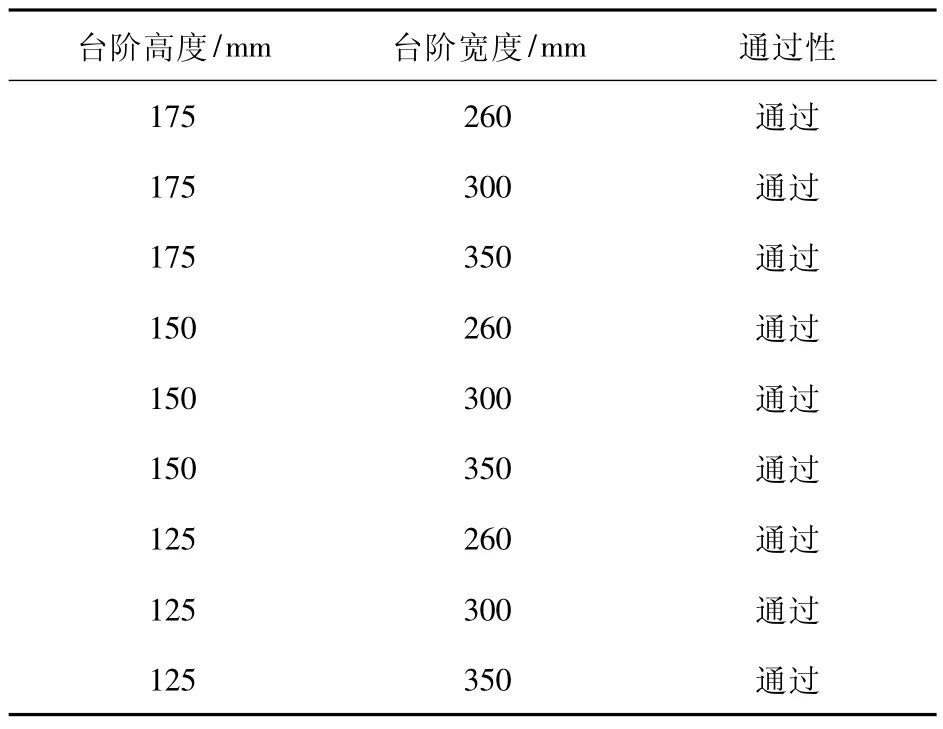
表3 臺階實驗結果Table 3 Stairs experiment results
5.4 實物實驗
在軟件仿真的基礎上,參照表1 所示參數搭建物理樣機。機器人控制系統基于STM32 單片機實現,各輪腿電機具有一個獨立的PID 控制回路,電機編碼器將電機轉速和相位回傳,控制器根據當前規劃速度和采用的步態來控制電機,電機輸出轉矩經減速器傳至輪腿,通過速度閉環以及相位差調節來實現機器人行進速度和步態的控制。如圖17 所示在一些復雜地形環境中進行了通過性測試。實驗證明本文研究中步態選擇的合理性,且機器人具備較好的行進效率和越障能力。

圖17 機器人復雜地面環境實驗Fig.17 Experiment of the robot in complex terrain
此外,如圖18 所示,于室外樓梯環境中使用物理樣機測試輪腿機器人的越障性能,實驗驗證本輪幅型輪腿復合機器人具備較好的越障能力,在滾動步態下可穩定高效的完成臺階攀爬。

圖18 機器人爬臺階實驗Fig.18 Experiment of the robot climbing stairs
6 結論
本文對于一種輪腿復合型機器人進行了步態研究與越障性能分析,在步態選擇時應當綜合考慮機器人在運動過程中的質心變化、受力情況以及主體穩定性等,以減輕在機器人在運動中的振動和能源損耗,對直行、轉彎以及攀爬臺階等任務中機器人的各種步態進行理論分析和實驗測試。得出主要結論如下:
1) 在直行任務中,為提升機器人在運動過程中的穩定性,選取振動和姿態變化較小的對角步態。
2) 在轉向任務中,由于采用差速控制方式,其余步態并不適用,只能選取同側步態。
3) 在滾動步態和前后步態中選取滾動步態時機器人對樓梯的適應性更強,爬梯時效率更高、穩定性更好。
4) 最終通過實驗驗證,證實了本文提出的輪腿復合型機器人結合步態控制方法在復雜地形環境中具有較好的行進效率和越障能力。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
