基于目標一致算法的導彈編隊控制與仿真
2023-02-28 05:48:12許山山史涯晴韓敬利簡開宇
測控技術 2023年2期
許山山, 史涯晴, 韓敬利, 簡開宇
(陸軍工程大學 指揮控制工程學院,江蘇 南京 210007)
隨著信息技術的發展和各國反導防御系統的演進,單枚導彈的突防效率已經遠遠不滿足理想的作戰效能,如何提高導彈的突防性能是亟須解決的一個重要問題。導彈編隊協同作戰是采用密集臨空飽和攻擊的方式間接實現導彈突防能力的提升,為了達到這一目的,需要應用導彈編隊飛行控制技術實現導彈的集群化和協同化。導彈編隊飛行控制是在導彈飛向特定目標或方向的過程中,保持導彈之間預定的幾何形狀(編隊),同時適應環境約束(例如避開障礙物)[1]。現有的集群飛行控制研究主要集中在各種無人機或機器人的集群控制方面,與之對應的一些技術在軍事和民用領域都得到了很好的驗證與應用。考慮到導彈編隊飛行控制與無人機群編隊控制在軌跡、姿態控制、動力學方面具有相似性,所以利用無人機群相關理論和控制算法解決導彈編隊隊形和控制是可行的,很大程度上可以提高集群導彈的整體作戰效能,尤其是在導彈的突防方面。
集群導彈編隊飛行是由多枚導彈組成,采用一定結構編隊攻擊特定目標的作戰方式,可確保導彈與導彈之間在飛行過程中保持一定的恒定距離[2]。編隊控制方法大多集中于解決集群導彈系統的幾何問題,采用的方法主要有領彈-從彈法、虛擬結構法、基于行為法等[3]。基于虛擬結構編隊控制方式最主要的缺點是外部環境需要具有較高的計算能力和較強的通信能力;而基于行為法的缺點是無法進行系統的穩定性分析。但是采取領彈-從彈法,不僅可以降低計算機處理數據的能力,而且控制效果較好。目前國內外對編隊控制器的研究主要集中在航天器和無人機飛行方面[2,4],對導彈方面的研究還比較少。劉高旗等[5]將無人機隊形重構的連續時間最優控制問題離散化為非線性規劃問題進行求解,但是對計算性能要求較高[5]。基于以上方法的優缺點,本文采用基于目標一致算法[6]研究集群導彈系統的編隊協同控制問題,其具有查找合適控制器的簡單性和集群導彈系統網絡結構的靈活性。首先,對導彈編隊控制系統[7]進行建模,提出系統的編隊控制算法;其次,在控制律中應用一種領彈-從彈結構,使領彈可以向從彈提供其期望狀態等命令以降低計算機對數據的處理能力,如圖1所示。在滿足多導彈組成的網絡基本假設的情況下,所提出的控制算法能精確地保持編隊。最后,根據模型在MATLAB中進行仿真實驗,驗證了算法的有效性。

圖1 導彈編隊控制系統
1 集群導彈系統描述
下面介紹將導彈建模為四階系統[6],利用圖論建模集群導彈之間信息傳遞的網絡結構,并定義控制目標。
1.1 導彈建模
假設存在運動特性相同的導彈,每個導彈具有4個噴管和1個控制器,每個噴管可以單獨從控制器獲取命令。為簡化模型,做如下假設:首先,導彈忽略外部空氣動力;其次,噴管對命令響應足夠快,可以忽略從控制器給噴管命令到噴管實際產生改變的時間延遲;再次,導彈飛行的高度不變,并且不發生偏航;最后,控制器不給導彈偏航力矩命令。在此假設下,給出導彈縱向和橫向的線性化模型。

(1)
式中:x和y分別為導彈在x軸、y軸的位置;u和v分別為導彈在x軸、y軸的速度(m/s);φ和θ分別為橫搖姿態角、俯仰姿態角(rad);p和q分別為橫搖角速度、俯仰角速度(rad/s);Mφ和Mθ分別為橫搖控制力矩、俯仰控制力矩(N·m);Ixx和Iyy分別為橫搖慣性矩、俯仰慣性矩(kg·m2);g為引力常量(m/s2)。
導彈平衡點是導彈在飛行高度和飛行速度不變的狀態。
定義新的導彈狀態變量為
(2)
(3)
利用式(1)~式(3)將新的導彈狀態空間運動方程寫為
(4)
繼續定義新的導彈狀態變量為
(5)
(6)
上標表示變量的順序。利用式(4)~式(6)將新的導彈狀態空間運動方程寫為
(7)
結合具有相同順序的縱向變量和橫向變量,定義新的狀態變量為
(8)
(9)
式中:下標i為導彈i。
利用式(7)~式(9)得到以下導彈模型四階系統:
(10)
1.2 面向用戶的網絡結構建模
將導彈系統模型創建為一組信息交互的動力系統,利用圖論描述集群導彈組成的信息網絡[6]。
利用圖G=(V,A)建模導彈之間的信息交互,其中V={v1,v2,…,vN}是一組節點,A∈V×V是一組邊。圖G中的邊(vi,vj)為一條從導彈i到導彈j的網絡路徑,表示導彈j可以從導彈i中獲取信息。
設A∈RN×N,D∈RN×N和L∈RN×N分別是與圖G相關的鄰接矩陣、度矩陣和圖拉普拉斯矩陣。鄰接矩陣A=[aij]的分量歸納為
(11)
如果導彈j通過網絡從導彈i獲取信息,aij設置為1,否則aij設置為0。
度矩陣是一個入度矩陣,定義為
D=diag[deg(v1),deg(v2),…,deg(vN)]
(12)
式中:deg(vi)為到達節點的通信鏈接數量。
圖拉普拉斯矩陣為
L=D-A
(13)
1.3 控制目標
從彈和領彈編隊飛行的理想狀態如圖2所示[6],圖2中顯示了3個從彈跟隨領彈列隊飛行。
為實現從彈跟隨領彈的飛行任務,將控制目標[6]定義為:每個從彈跟隨領彈,并且從彈位置漸近收斂到從彈和領彈之間的一個期望相對位置,可表示為

圖2 理想編隊隊形
(14)
式中:ri為從彈i的位置;rL為領彈的位置;di為從彈i與領彈之間的期望相對位置。相關符號定義如圖3所示。需要注意的是,從彈的期望相對位置i與任何其他從彈位置不同。

圖3 相關符號定義
為實現控制目標,做如下假設。
假設1:每個從彈必須通過網絡上的領彈進行連接,但并非所有從彈都必須通過領彈進行直接連接。此外,每一對不同的從彈之間必須有一個交互式通信鏈路。
假設2:領彈的運動必須獨立于任何導彈,即領彈的運動不受任何導彈的影響。
2 隊形控制器設計
筆者提出一種基于目標一致算法來實現1.3節中的控制目標。
2.1 基本思路
編隊控制主要是控制率設計,使導彈編隊中的從彈能夠到達期望位置,跟隨領彈遂行完成作戰任務,采用的控制結構[3]如圖4所示。

圖4 編隊控制框圖
基于目標一致算法的主要功能步驟如下。
① 確定作戰任務目標,算法將此目標認定為所有單一智能體的共同目標。
② 根據領彈參考軌跡確定從彈飛行軌跡,通過計算獲得從彈距離領彈的期望位置。
③ 領彈在計算處理完數據后,將信息傳遞給連接的從彈,從彈實現軌跡修正,將修正信息反饋給領彈。
④ 算法將反饋信息數據進行處理后,正向傳遞給從彈進行驗證并且繼續修正飛行軌跡。
2.2 編隊控制律設計
為實現控制目標,分別考慮一組導彈的共同目標和每個導彈的單獨目標,前者采用基于目標一致的合作控制算法實現共同目標,后者采用領彈-從彈結構實現單獨目標。領彈提供位置給與自己直接連接的從彈并將理想的位置作為命令傳遞給從彈。該控制算法的優點是所有從彈不必直接與領彈連接,滿足假設1和假設2的最小網絡結構就足以實現控制目標。
適用于導彈飛行器的控制律[6]為
(15)
(16)
(17)
式中:Mi(t)為控制力矩;αij為導彈j是否從導彈i獲取信息;βk為控制增益。

設由N個(≥1)從彈(表示為式(10))和一個領彈組成的集群導彈系統滿足假設1和假設2。設由從彈和領彈組成的網絡的圖拉普拉斯算子的非零最小特征值為λmin。將控制律式(15)應用于每個導彈,當控制器增益為βk時,對k∈{0,1,2,3},使其滿足以下一個條件,則漸近達到控制目標(式(14))。
βk>0, ?k∈{0,1,2,3}
(18)
(19)
β1β2>β0β3
(20)
3 編隊仿真模型
滾動、俯仰和速度是影響導彈飛行過程中的重要參數,通過仿真實驗修改相關參數并分析結果,驗證算法的有效性。需要說明的是,本文主要以導彈為研究背景,采用的仿真實驗算法均來自開源項目,得到的實驗數據均是模擬數據,與實際導彈參數無直接關聯,研究的意義在于為導彈編隊提供技術參考。
3.1 仿真設置
考慮一個單一的網絡,且在每一對不同的從彈之間有交互通信鏈路,如圖5所示。其主要特點是只有中繼從彈直接從領彈獲取信息,其他從彈間接從領彈獲取信息。該網絡的圖拉普拉斯算子的非零最小特征值為λmin= 0.2。

圖5 通信網絡示意圖

假設一組導彈編隊分別由4個從彈和1個領彈組成,控制器β=[β0,β1,β2,β3],設置兩組實驗分別調整β1、β2,每組實驗設定4個仿真方案,具體如表1所示。

表1 兩組實驗的數值模擬條件
3.2 仿真結果
3.2.1 調整β2實現對導彈方向(滾動、俯仰)的控制
按照方案一設定參數進行60 s仿真,模擬領彈(紅色)和從彈的運動軌跡并得出結果,如圖6所示。方案二、方案三和方案四的仿真結果分別如圖7、圖8和圖9所示。
① 使用默認值,得到所需的行為(與一些可能的路徑沖突)如圖6所示,頻繁的滾動和傾斜的系統將會導致更高的碰撞概率。
② 減小β2值,仍然滿足方程中給定的約束條件,但使收斂速度更快,轉彎更快(避免了與領彈的路徑沖突)。
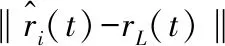
③ 模擬最小約束條件下的β2=3,導致導彈的飛行軌跡會發生振蕩,一定時間內會趨于穩定,但是如果β2進一步變小,會導致軌跡不穩定。
④ 如果β2進一步變小,會導致軌跡不穩定。
3.2.2 調整β1實現對導彈速度的控制
① 當β1=0,破壞最小約束,導致從彈繞著領彈飛行的半徑越來越大,一旦領彈飛行停止,編隊永遠不會聚合,如圖10所示。
② 當β1≤4時,跟隨領彈飛行的從彈移動速度加快,穿越特定距離前會出現減速,這樣領彈就可以趕上從彈,從而導致導彈運動軌跡出現振蕩,也同時增加了收斂時間,如圖11所示。
③ 當4≤β1≤17時,從彈可以正常跟隨領彈編隊飛行,如圖12所示。
④ 當β1>17時,從彈不會跟隨領彈編隊飛行,從實驗結果來看,超出這個范圍都會造成軌跡的不穩定或者不聚合,如圖13所示。

圖6 方案一:β=[1,5,15,3]

圖7 方案二:β=[1,5,7.5,3]
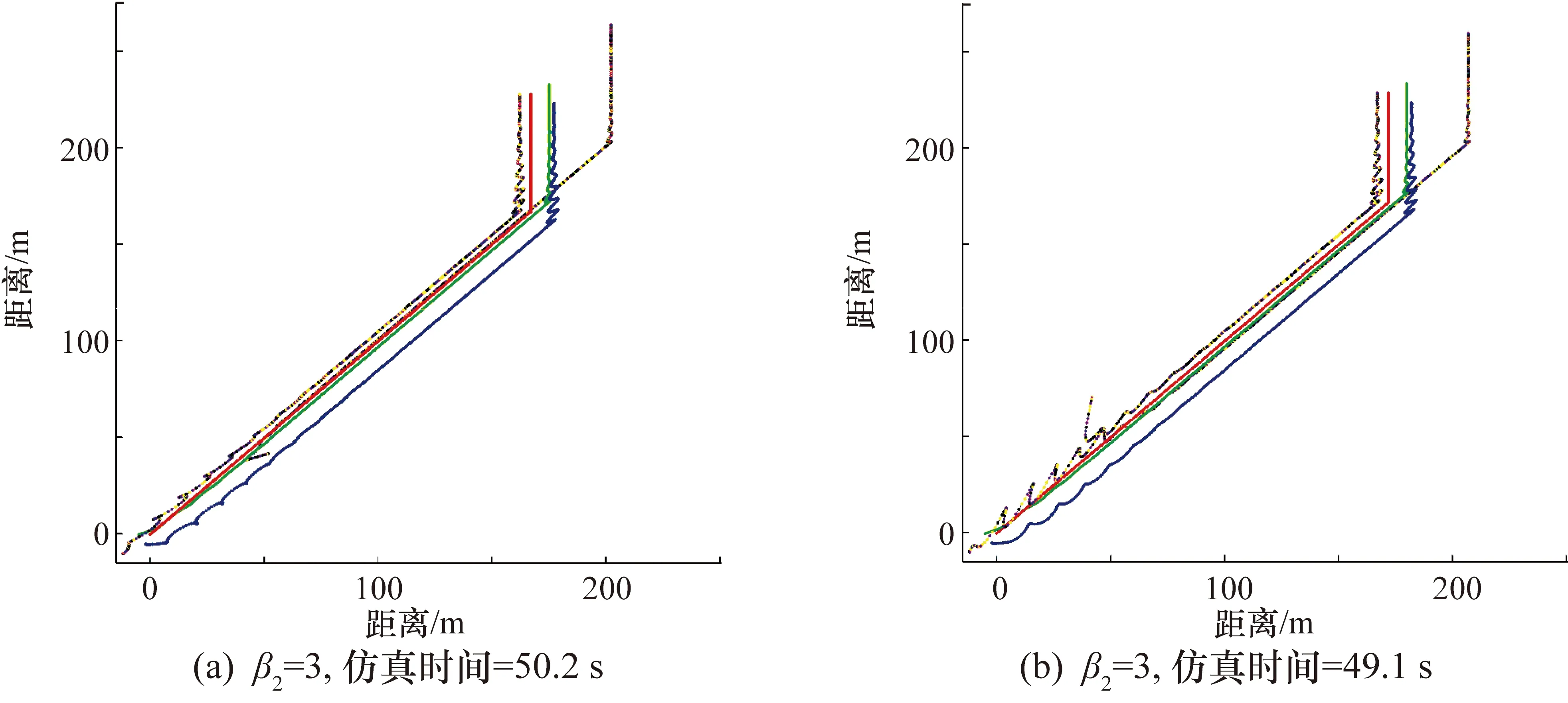
圖8 方案三:β= [1,5,3,3]

圖9 方案四:β=[1,5,1.5,3]

圖10 方案一:β1=0,β=[1,β1,15,3]
圖11 方案二:β1<4,β=[1,1,15,3]

圖12 方案三:4<β1≤17,β=[1,β1,15,3]
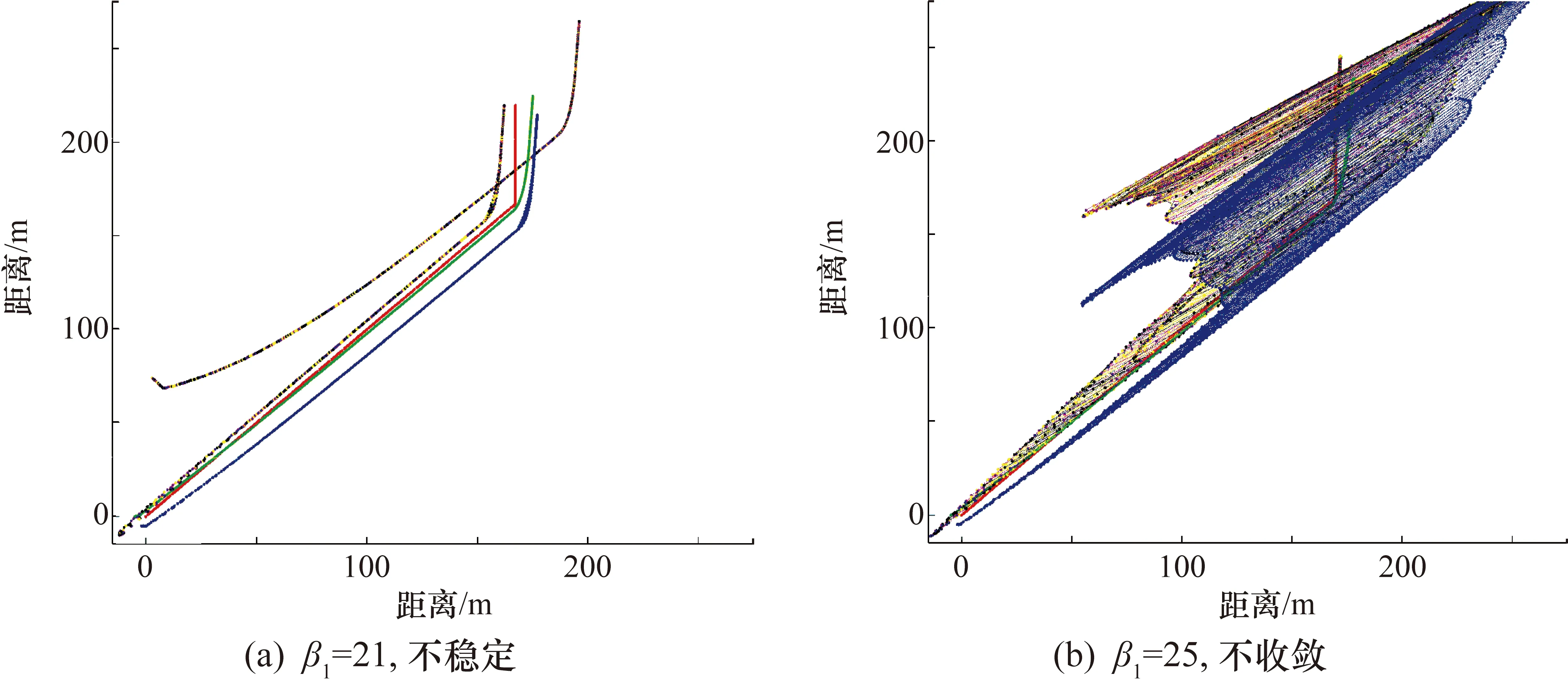
圖13 方案四:β1>17,β=[1,β1,15,3]
3.3 小結
實驗1結果表明,隨著β2的減小,導彈編隊模擬結果趨于發散,其值越大,導彈編隊狀態越穩定。這表明通過合理調整控制器增益參數β2,能夠實現控制導彈編隊的穩定性。實驗2結果表明,當β1時處于[4,17]這個區間時,從彈可以正常跟隨領彈編隊飛行,這表明通過合理調整控制器增益參數β1,也能夠實現控制導彈編隊的穩定性。
4 結束語
為實現導彈編隊控制,提高導彈編隊協同作戰的穩定性,實現密集臨空飽和攻擊,從而提升導彈突防作戰效能,本文將導彈的線性化模型表示為四階系統,利用圖論方法對編隊導彈之間的信息網絡結構進行建模,提出了四階系統的編隊控制算法。針對一階不考慮動力學特性的編隊控制問題,直接將編隊控制算法推廣到四階不考慮動力學特性的編隊控制系統,并采用了領彈-從彈結構,使領彈可以為從彈提供編隊的幾何配置指令。由領彈和從彈組成的編隊必須滿足一個從彈直接獲取領彈指令,以及每一對不同從彈之間具有交互式通信鏈路的要求。編隊控制算法通過確定控制器的增益以實現控制目標。根據相關假設和要求進行仿真實驗,結果表明,該算法對于具有四階動力學的導彈編隊飛行是有效的。