可穿戴外骨骼機器人研究現狀
2023-03-11 06:29:24陳迎年
科技創新與應用 2023年6期
郭 慶,陳迎年
(華東理工大學 機械與動力工程學院,上海 200030)
近年來,中國老齡化社會程度不斷加深,老年人出行及病后健康訓練均需要大量可穿戴外骨骼機器人的協助,同時在軍事領域也存在提高單兵裝備優勢、保持軍隊戰斗力和節約能源的需求,而在民用領域也存在輔助人類托舉重物、提高殘疾人行走能力的需要,因此,可穿戴外骨骼機器人的發展無疑對經濟、社會和國防均有著重要的意義。
可穿戴外骨骼機器人是通過仿生學、機構學和控制學等學科的交叉融合發展而來的,其中包含了機械結構、信息傳感和自動控制等關鍵技術,近年來已經成為國內外的研究熱點[1]。本文從不同角度闡述了當前國內外可穿戴外骨骼機器人的發展現狀,并對相關應用與關鍵技術進行了介紹,討論當前制約可穿戴外骨骼機器人發展的難點,最后對可穿戴外骨骼機器人的發展進行展望。
1 國外可穿戴外骨骼機器人研究現狀
20世紀60年代末期,美國及前南斯拉夫對外骨骼機器人的研究便已經開展,美國進行外骨骼機器人研究的目的是增強單兵能力,以更好地服務軍事,前南斯拉夫的目的則是用于輔助殘障人士的日常行走[2]。隨后,下肢外骨骼機器人得到了世界各國的關注,日本、俄羅斯、法國、加拿大和以色列等國家也紛紛加入下肢外骨骼機器人的研究之中。
1.1 歐美
2004年,在美國國防部高級研究計劃局(DARPA)的資助下,加州大學伯克利分校推出了其第一代單兵下肢外骨骼助力系統BLEEX[3]。該系統擁有2個擬人腿,單腿包括髖關節、膝關節、踝關節和彈簧等共同控制的7個自由度。該系統的質量大約為45 kg,可載荷32 kg的重物,采用液壓驅動關節運動,在這款下肢外骨骼機器人上創新性地大量集成各種傳感器,以實時獲取人體運動信息,最大限度貼合人體運動規律[4]。該款下肢外骨骼機器人不僅可以幫助士兵搬運重物,也可以輔助醫療人員轉移傷員或者輔助消防員攜帶消防設備。在此基礎上,Kazerooni教授及其團隊又開發出了“ExoHiker”和“ExoClimber”2款下肢助力外骨骼機器人。前者設計的目的是長時間執行任務攜帶重物,質量14 kg,額定負荷680 N,采用液壓驅動[5];后者主要用于上樓梯和爬山,質量約22.7 kg,額定負荷680 N,采用液壓驅動[6]。
2007年,美國Sarcos公司研制出一款外骨骼機器人XOS,該型外骨骼機器人采用液壓驅動,質量70 kg,可以在背負重物的情況下保持正常速度行走。而且該公司于2010年研發出XOS-2型全身外骨骼機器人,大幅提高負荷能力,采用外部電源供能[7]。2019年,該公司又推出一款用于快速搬運貨物的外骨骼機器人GuardianXO,可以將佩戴者的力量放大近20倍,并可以實時準確反映佩戴者的運動操作[8]。
2010年,伯克利仿生科技公司推出HULC下肢外骨骼助力系統,該系統擁有提高佩戴者的最大承重能力介于68~91 kg之間、降低佩戴者的代謝成本2大優勢,采用電池驅動,通過可以選擇配置的承載部件搭載約91 kg的負載,把重量均勻分布在承載系統上,使得不需要穿戴者來承重[9]。2017年,洛克希德·馬丁公司又推出一款下半身可穿戴膝關節助力外骨骼ONYX,該系統可以有效減輕佩戴者背部及腿部的負荷,采用電機驅動,可以有效協助佩戴者托舉重物或者在斜坡行走[10]。幾種外骨骼機器人如圖1至圖5所示。
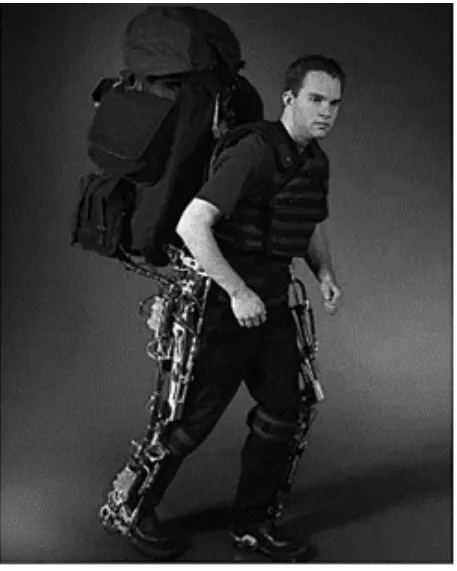
圖1 BLEEX

圖2 ExoHiker
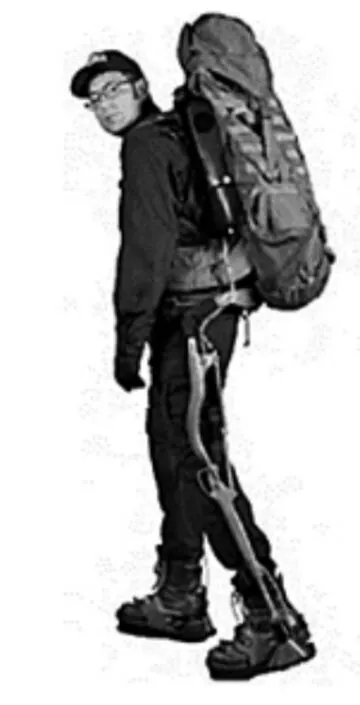
圖3 ExoClimber
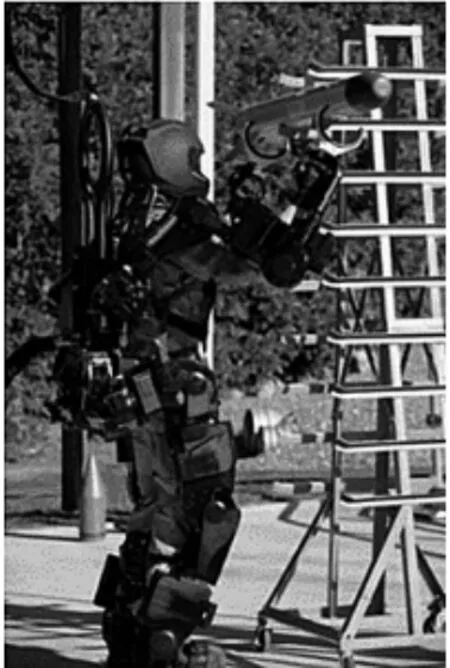
圖4 XOS-2
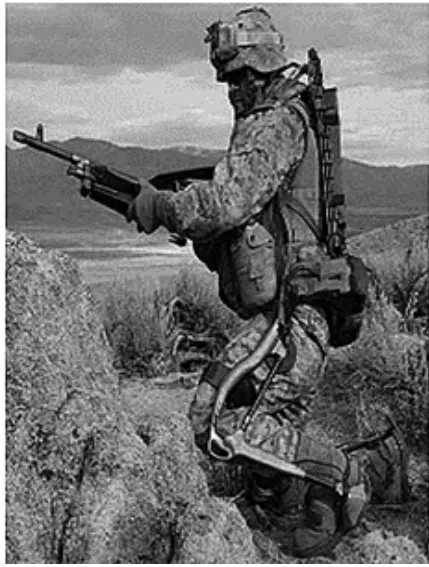
圖5 HULC
2011年,法國RB3D公司研發的“大力神”外骨骼裝置質量約17 kg,能夠托起60 kg的重物,系統采用動力電池組供電,“大力神”突出的特點就是沒有采用任何傳感器記錄人體的運動信息,而是基于控制算法,使其了解佩戴者所表達的意圖并完成相應的動作[11]。2015年,加拿大仿生動力公司研制出一種被動式可穿戴外骨骼裝置PowerWalk,其最大的特點為能夠吸收膝關節彎曲的能量來進行發電,極大地節省了進行任務時的能源消耗[12]。2019年,加拿大渥太華大學開發了一種被動步行輔助外骨骼機器人(PWAE),該系統由2個支撐腿及座椅框架組成,質量約為5.68 kg,根據實際測試,佩戴者在站立及行走時可以獲得較大的外骨骼額外支撐[13]。2020年,德國仿生學公司German Bionics推出第四代Cray X外骨骼機器人,并采用碳纖維設計與電池驅動,通過在工人背上提供支撐使得工人在舉起重物時免受重物過度的壓力,進而提高工人安全性與工作效率,在這款外骨骼機器人身上還創新性地運用了集成云接口、物聯網等智能技術[14]。
1.2 日韓
2009年,日本筑波大學基于幫助健康人增強力量,開發出一種下肢運動輔助外骨骼(HAL)[15]。經過多年發展,HAL外骨骼已經發展至HAL-5版本,HAL-5的質量約23 kg,其擁有8個可控關節,包括下肢關節與上肢關節,由電機驅動,值得注意的是該型號外骨骼采用肌電信號作為穿戴者運動信息的輸入控制信號,并通過電機控制關節運動[16]。此外,近年日本還研究了幾款優秀的外骨骼機器人,包括W.W.H-KH、Musclesuit等。
2014年,韓國漢陽大學開發出一款外骨骼輔助機器人HEXAR,用于協助個人承擔重物,在髖關節利用恒力機制承擔上部外骨骼系統的重量,在踝關節承擔外骨骼系統的總重量,通過利用自身的彈性勢能為行走提供動力[17]。2018年。韓國漢陽大學提出了負重型下肢膝關節外骨骼機器人,可以在膝關節伸展過程中進行機械鎖定,并將載荷轉移到地面,并且還可以在膝關節處于擺動階段時松開鎖扣,隨佩戴者運動[18]。幾種外骨骼機器人如圖6至圖10所示。
圖6 大力神

圖10 HEXAR
2 國內可穿戴外骨骼機器人研究現狀
我國在可穿戴外骨骼機器人技術研究方面起步較晚、投入較少,與美國、日本仍存在較大差距,目前國內研究仍處于關鍵技術突破與試制樣機階段,許多諸如機械、傳動、傳感和控制等關鍵技術仍在研究與驗證中,在外骨骼商業化應用上發展緩慢。
2007年,海軍航空工程學院設計的NAEIES外骨骼采用電機和氣動彈簧驅動,并多次仿真研究裝置控制方法,當前該型外骨骼機器人已發展三代,第三代由空氣彈簧和電纜電機驅動,部分結構由碳纖維制成,載重量較大,設計優秀,可以完成上、下和蹲等動作[19]。2008年,華東理工大學研制出ELEBOT外骨骼機器人,采用液壓驅動,通過足底壓力傳輸信息和識別動力傳感器信息獲取佩戴者行動意圖[20]。2016年,北京工業大學的第三代負重外骨骼,由液壓驅動,采用電池供電,可以在負載情況下完成上下樓梯、爬坡等動作[21]。2016年哈爾濱工業大學開發了HIT-LEX外骨骼機器人,其與人體運動的協調性較為出色[22]。2020年北京航空航天大學設計了一款輔助下肢運動功能障礙患者的被動下肢外骨骼,其有著較為出色的重力補償性能[23]。此外,還有中國兵器工業第二〇二研究所、航天18所等單位也在進行著相關研究。
圖7 PWAE
圖8 Cray X
圖9 HAL-5
3 可穿戴外骨骼機器人發展難點
在軍事領域,針對提高單兵作戰需求,目前現有的軍用外骨骼系統綜合助力效果不明顯,單兵體能消耗并沒有得到有效減少,而且當前可穿戴外骨骼機器人大多十分笨重,難以在較為復雜的地形環境下進行有效移動。另外,人機交互機制的不成熟造成穿戴舒適性、人機協同控制性較差。在民用領域,當前外骨骼機器人有著難以完成較復雜的動作、對于患者的主動適應性較差、實際應用中信息提取與交互能力較弱、成本高昂和難以大范圍推廣等缺陷[24]。因此,當前可穿戴外骨骼機器人面臨的挑戰與難點可以概括為安全可靠的控制、穿戴者與裝備間的有效交互、裝置的主動適應性、裝備的輕量化、長時間續航及智能化等問題。
4 結束語
可穿戴外骨骼機器人要求系統具有高度的人機相容性與交互性,從科學研究的角度看,針對當前可穿戴外骨骼機器人研究的技術難點與瓶頸,包括人機耦合、人體運動信息識別、自適應性和安全控制等技術點仍需不斷突破,科研人員在新材料、新傳感和新驅動等方面仍需展開深入研究,以完善外骨骼機器人的短板。從發展趨勢來看,可穿戴外骨骼機器人的輕量化、集成化、高效驅動與同步控制具有非常廣闊的前景,目前在能源技術尚未突破的基礎上,完善控制系統與驅動系統,使之更加擬人化與高效,對提高人機交互水平與適應性有著良好的促進作用,相信在社會多方努力下,定能推動外骨骼機器人的產學研合作,加快外骨骼機器人在軍事、民生等領域的應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
