基于超寬帶和無線傳感網絡技術的夜間輔助系統
2023-03-13 15:26:08魏建兵黨進才通信作者馬秦靖
信息記錄材料 2023年1期
關鍵詞:系統
魏建兵,黨進才(通信作者),馬秦靖
(甘肅林業職業技術學院 甘肅 天水 741020)
0 引言
隨著老齡化進程加劇,越來越多的研究人員將目光投向了養老領域[1]。商無冬[2]利用藍牙Mesh無線通信技術,設計基于藍牙Mesh的手環用以對老人實時健康狀況數據進行采集。賀進[3]使用Oracle數據庫和RFID定位技術實現了系統管理、人事管理、日照服務管理等功能,以達到養老院管理人員借助現代化技術手段,為老年人提供高質量的服務。鄔淵[4]基于RFID技術與定位算法,構建了養老院人員實時定位系統,再通過上傳的定位信息數據展現老年人的活動信息。沈夢琦[5]采用RFID射頻識別技術和ZigBee通信技術實現了老人身體狀況監控與警報、廣播通信等功能模塊。上述研究利用各種無線傳感網技術手段,基于不同側重點對老人身體狀況、老人所處位置等進行實時管理、監控,有效提升了養老院管理水平與效率。但利用藍牙以及ZigBee技術作為室內定位技術具有一定的局限性,因此本文將利用在穿透性、抗干擾以及功耗性能等方面均優于藍牙以及ZigBee的超寬帶(ultra wide band,UWB)技術作為人員定位的主要技術依據。
為了進一步提升夜間監管能力,將無線傳感網絡(wireless sensor networks, WSN)技術與UWB技術相結合,打造智能化的夜間看護系統。老人在夜間出現異常行為或者停留在非休息區域超過閾值時間時系統自動告警,值班人員趕往該房間進行查看或是利用室內電話聯系該老人。該系統極大提升了老人在夜間的居住安全感,也減少了夜間值班人員巡夜的頻次,并且維護了老人的隱私。
1 相關技術
1.1 UWB技術
UWB技術屬于無線載波通信范疇,工作頻段區間范圍為3.1~10.6 GHz,通過極高的射頻頻率進而達到高帶寬的效果。利用能夠產生極短脈沖的信號發生源,在短時間內以極低的功率將數據進行高速傳播[6]。
目前,成熟的室內定位技術包括藍牙、WiFi、ZigBee、超聲波以及UWB等。這些室內定位技術基于各自的優缺點,其應用領域也各不相同。表1給出了各種技術的主要技術指標對比結果。

表1 常用室內定位技術主要參數對比
由常用室內定位技術主要參數對比表可以看出,UWB定位技術在穿透性和抗干擾能力綜合能力方面均優于其他技術。由于自身傳播特性,所需功耗低,延長了無線節點的待機時長。便宜的部署成本使得其在實際應用中得到商家的廣泛使用。UWB技術現已成為室內定位領域的研究熱點。
UWB定位技術是直接通過收發窄脈沖信號進行信息傳輸,無須正弦載波作為傳輸媒介。UWB定位技術的出現提升了室內定位的精準度,并且它具有對信道衰落不敏感、發射信號功率譜密度低、低截獲能力、系統復雜度低、能提供厘米級的定位精度等優點。
1.2 WSN技術
WSN是通過無線通信技術和協議,以自組織的形式將眾多傳感器節點構建在一張通信網絡中,主要實現了數據的采集、處理和傳輸三大功能。本文采用三層體系架構構建WSN,分別為數據采集層、數據傳輸層以及綜合應用層。圖1為利用ZigBee構建的無線傳感網絡示意圖。基于Z-Stack協議棧,數據采集區域內的傳感器節點依據協議將數據傳輸到網關節點,再由網關節點上傳至上位機進行數據的存儲以及顯示等。其中,傳感器節點包含數據采集模塊、數據處理模塊、無線收發模塊和電源模塊,其主要完成采集數據、處理數據以及中轉數據等操作。圖2為傳感器節點結構圖。

圖1 基于ZigBee的WSN構建示意圖

圖2 傳感器節點結構圖
ZigBee是一種可靠的無線數傳網絡,類似于CDMA和GSM網絡。ZigBee數傳模塊類似于移動網絡基站。通信距離從標準的75 m到幾百米、幾公里,并且支持無限擴展。與移動通信的CDMA網或GSM網不同的是,ZigBee網絡主要是為工業現場自動化控制數據傳輸而建立,因此,它必須具有簡單、使用方便、工作可靠、價格低的特點。每個ZigBee網絡節點不僅本身可以作為監控對象,例如其所連接的傳感器直接進行數據采集和監控,還可以自動中轉別的網絡節點傳輸的數據資料。除此之外,每一個ZigBee網絡節點還可在自己信號覆蓋的范圍內,和多個不承擔網絡信息中轉任務的孤立的子節點無線連接。
2 系統方案設計
根據實際調研過程中養老院老人住所的勘察,以及符合智能家居物聯網可擴展性、安全性、實用性等原則,并參考物聯網三層體系結構,基于兩大模塊和三層架構進行系統的整體方案設計,系統整體結構如圖3所示。
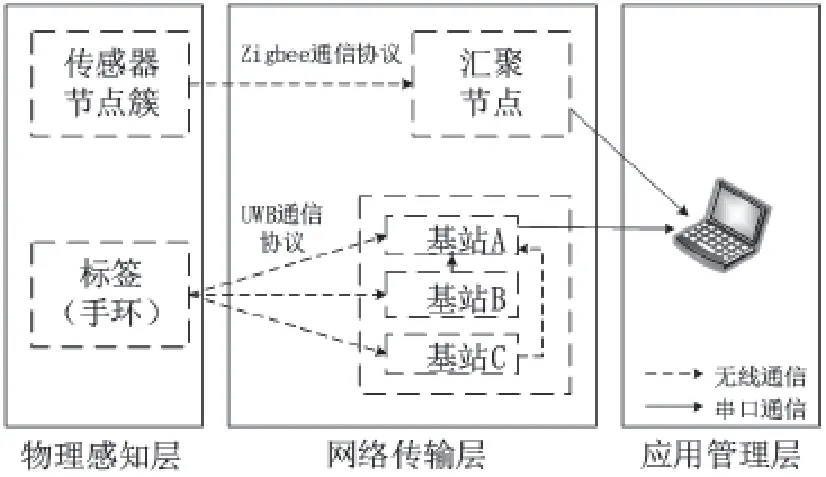
圖3 系統結構圖
(1)利用WSN技術,構建基于Z-Stack協議的ZigBee傳感網,感知老人夜間在房內所處大致位置,是否在床,是否在如廁等,傳感器布設如圖4所示。通過在床鋪布設壓力傳感器,門框處布設紅外對射傳感器,無線傳感網系統即可感知老人身處房間中的區域。

圖4 傳感器布設圖
(2)利用UWB技術,構建“一標簽+三基站”的老人夜間活動軌跡監測系統。如圖5所示,其中標簽以腕帶或胸牌的形式被老人隨身攜帶,三個基站放置在房間不同角落(不能處于空間中的同一條直線上)。在(1)的基礎上刻畫老人行動軌跡,幫助值班人員進一步研判老人情況,也為后續刻畫老人夜間活動規律提供數據支撐。

圖5 “一標簽+三基站”布設圖
3 人員定位方法及實現
(1)對于ZigBee傳感網而言,只需判斷三組傳感器之間的信號即可確定人員所處房間位置,假設布設在床鋪上的壓力傳感器稱為床感,布設在臥室與客廳相通門框上的紅外對射傳感器稱為臥客門感,布設在客廳與洗手間相通門框上的紅外對射傳感器稱為客廁門感。相關傳感器感受到人體重量以及人體散發的熱紅外,給系統反饋高電平1(表明有人),否則為低電平0(表明無人),并設置相應的時間閾值,當在某處停留時間超過閾值時,系統告警。那么系統判別條件及結果如表1所示。

表1 停留超時異常告警系統判別條件及結果
(2)利用“一標簽+三基站”的UWB技術構建的人員運動軌跡識別系統,采用基于信號到達時差測距算法(TDOA測距算法)進行當前位置定位。TDOA測距算法是利用定位標簽發出的信號到達三處不處于同一條直線上的基站時,其到達任意兩個基站的時間差值與光速相乘的結果,進而計算該標簽到各基站間的距離差[7]。基于TDOA的定位方法又稱為雙曲線定位,其原理是通過測量UWB信號從標簽到兩個基站之間傳播時間的差值,得到標簽到兩個基站之間的固定距離差。它并不是直接利用信號到達時間,而是利用多個基站接收到信號的時間差來確定移動目標的位置。
目前主要有兩種時間差的獲取方式:
(1)利用移動臺到達2個基站的時間TOA,取其差值來獲得,這時仍需要基站時間的嚴格同步,但是當兩基站間移動信道傳輸特性相似時,可減少由多徑效應帶來的誤差。
(2)將一個基站接收到的信號與另一個基站同時接收到的信號進行相關運算,從而得到TDOA的值,這種算法可以在基站和移動平臺不同步時,估計出TDOA的值。對于蜂窩網中的移動平臺定位而言,TDOA更具有實際意義,這種方法對網絡的要求相對較低,且定位精度較高。
本文選用第二種方法進行測距計算。若“一標簽+三基站”布局如圖6所示,三個基站坐標分別為A1(x1,y1)、A2(x2,y2)和A3(x3,y3),標簽坐標為P(x0,y0),標簽P到基站A1、A2和A3的距離分別為d1,d2以及d3,由下式可計算得到標簽的坐標。

圖6 TDOA測距原理圖
(3)依據上述定位方法,利用C#語言構建上位機軟件,最終軟件可視化展示截圖如圖7和圖8所示。

圖7 夜間活動超時告警系統上位機界面圖

圖8 TDOA測距算法可視化界面圖
4 結語
綜上所述,本文利用無線傳感網與超寬帶技術,針對養老院夜間巡查盲區,構建了養老院夜間看護輔助系統,從系統架構、軟硬件搭建以及相關算法詳細闡述了本系統的實現過程。該系統具有較高實用性和較強的系統穩定性,能夠解決由于養老院夜間值班人員巡查不到位,造成養老院存在潛在的管理風險和安全隱患的問題。后期將會從該系統收集到的老年人夜間活動數據入手,利用現有的數據處理方法,挖掘出隱藏在數據背后的規律,以期指導養老院提升夜間管理能力,進一步提升獨居老人的安全性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
