信標數量不固定的聲學定位組合導航方法及仿真
2023-03-16 10:24:52海軍潛艇學院航海觀通系高大遠
數字技術與應用 2023年2期
海軍潛艇學院航海觀通系 高大遠
中圖分類號:TN967.2文獻標識碼:A文章編號:1007-9416(2023)02-0008-04
DOI:10.19695/j.cnki.cn12-1369.2023.02.02
收稿日期:2022-11-01
作者簡介:高大遠(1978—),男,甘肅民勤人,工學博士,副教授,研究方向:水下導航與組合導航。
針對水下航行器利用聲學定位時可能出現無法收到足夠數量信標測距信息的問題,提出一種基于單聲信標測距和推算定位的組合導航方法。以航行器航速、航向信息為輸入,位置為狀態,信標測距信息為輸出,建立組合導航濾波模型,采用擴展卡爾曼濾波器進行組合導航信息濾波。通過仿真對本方法應用特性進行驗證分析。研究表明,本方法可以有效應對信標數量較少或航行器有效接收信標應答信號數量不固定的情況,具有良好的水下定位效果。
水下平臺航行或工作常采用水聲定位方法獲取位置信息。由于水聲定位方法其具有可控性好、精度高等特點,在海洋工程和科學考察活動中得到廣泛應用,目前已有較多貨架產品。其中長基線定位系統(Long Base Location, LBL)具有定位范圍大、精度高的特點[1,2]。LBL定位原理與衛星定位原理類似,在海底布設至少3個聲信標(一般4-6個),精確測量其位置作為空間基準。在定位時,航行器安裝的聲學問答機發射信號,海底聲信標發射應答信號,航行器根據信號往返的延時,算出距離信息,根據航行器到多個聲信標的距離,即可解算其位置,實現導航定位。
但由于海底環境的制約,有時難以布設足夠數量的信標;海洋環境的復雜性使得水下航行器也難以接收到所有信標的應答信號。在實際定位時,航行器與各信標距離不同,也無法同時接收到所有應答信號,考慮到航行器的動態航行特性,此時利用應答信號進行解算帶來定位誤差。
針對上述情況,需要一種利用較少數量信標的水聲定位方法,同時此方法還應能適應多個信標以及信標應答信號不同時到達的情況。
對于此類問題,已有利用較少數量聲信標(1或2個)進行定位方法的研究[3,4],基本思想是航行器通過在聲信標周圍航行,獲取航跡上多個點上聲信標的距離,利用幾何方法解算航跡相對聲信標的相對關系,從而計算航行器位置。這一方法,類似匹配定位,是一種非實時的方法,對航跡約束較多,目前并未廣泛使用。
本文研究一種利用航行器推算定位信息與單聲信標測距信息的組合導航定位方法。采用此方法,航行器在只接收到一個聲信標應答信號的情況下仍然可以進行定位,在多個信標組成的聲學定位基陣內,可以根據所接接收的應答信號分別進行定位計算,不再要求接收到所有信號后才進行定位計算,放松了對聲信標數量的要求。這一方法對工程應用具有一定的實用價值。
1 單信標測距/推算定位組合導航建模
一般水聲定位方法利用航行器到多個信標的測距信息,通過幾何解算計算航行器位置。當信標數量較少、測距信息存在誤差時,位置解算無法進行或存在較大誤差。考慮到水下航行器一般帶有羅經和計程儀等測向、測速設備,可進行推算定位,因此通過建模可將二者結合實現定位。
1.1 推算定位模型
航行器水下航行,深度固定且已知,測量航速V和航向C,則可建立一般推算定位模型如式(1)、式(2)所示:
其中,λ、φ為航行器經緯度,R為地球半徑,vN,vE分別為載體的北向速度和東向速度,如式(3)所示:
水聲定位時,問答/應答信號作用距離一般不超過十幾公里,在此局部范圍內,可以建立平面直角坐標系,航向定義為航行器與坐標系y軸之間的夾角,則模型轉化如式(4)、式(5)所示::
在考慮航速和航向測量誤差,并對方程離散化后,可得推算定位方程如下:
其中,ωv和ωc表示航行器速度和航向測量過程中的測量誤差,狀態(xk+1,yk+1)表示航行器當前在直角坐標系中的位置,(xk,yk)表示上一時刻航行器位置,ΔT為推算時間步長。由于航速和航向誤差的存在,推算定位的誤差不斷增大,需要利用水聲定位信息校正。
1.2 水聲測距與定位模型
以4個信標的水聲定位為例,仍然考慮平面直角坐標系。假設海底信標的位置坐標為(xbk,ybk,zbk),k=1,2,3,4,航行器的位置坐標為(x,y,z),測量得到的航行器到信標距離為Lk,則可建立距離方程如式(8)所示:
進行水聲定位時,利用多個信標的測距信息,即可計算航行器位置[2],進而對推算定位信息進行校正。
當聲學定位系統信標數量較多時,公式(8)中的方程數量增多,可充分利用冗余信息,得到精度較高的定位解;但當可測距信標數量較少時,方程的個數少于待求變量個數,則無法計算得到定位信息。此時需將推算定位模型公式(6)和公式(7)與水聲測距模型公式(8)結合,利用卡爾曼濾波等方法進行組合導航對位置進行最優估計。
2 單信標測距/推算定位組合導航濾波方法
如圖1所示,航行器利用航速、航向信息對位置進行推算,由于存在測量誤差(常值誤差和隨機干擾),其定位誤差隨時間累積而不斷增加,導致位置信息不可信。當其接近信標,能夠測得信標的距離時,若只能接收一個或較少數量的信標信息,則無法單獨完成定位計算。此時,考慮推算定位已經給出了部分位置信息,將其充分利用,則可實現利用單信標測距信息進行定位。
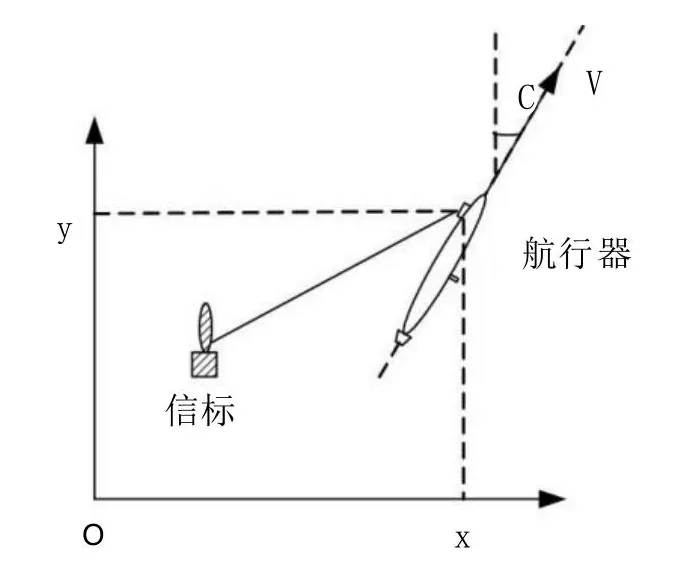
圖1 單信標測距/推算定位組合導航示意圖Fig.1 Combined navigation method based on single beacon/dead reckon
將公式(6)、公式(7)、公式(8)進行結合,構成組合導航模型,利用擴展卡爾曼濾波方法可實現組合導航定位,方法如下。
首先將模型進行重寫,對某一時刻k,令狀態和輸入如式(9)所示:
輸出如式(10)所示:
其中(xb,yb,zb)是單信標的位置坐標。
則過程模型如式(11)、式(12)所示:
對于式(11)、式(12)來說,需在實際航跡附近線性化,計算雅可比(Jacob)矩陣。
對于輸入,雅可比矩陣計算公式如式(13)所示:
對于測量方程,其雅可比矩陣可寫為如式(14)所示:
對于上述模型,利用擴展卡爾曼濾波進行信息處理。
假設在第k時刻,已得到對當前狀態的估計值,估計方差陣為Pk,當測量到航向、航速后,則利用過程模型公式(11)進行狀態的一步預測,得到如式(15)所示:
方差的一步預測如式(16)所示:
其中,Qk是隨機干擾[ωVkωCk]的方差。
然后,基于狀態的一步預測,利用公式(10)對時延測量信息進行預測,記為Zk+1。
當水聲定位系統檢測到應答信號,給出實測距離信息,則可進行信息修正,對本時刻狀態和方差進行估計,公式如式(17)、式(18)所示:
其中,Kk+1是增益矩陣,如式(19)所示:
其中Rk+1是距離測量誤差的方差。
這樣公式(15)-公式(19)即單聲信標的組合導航卡爾曼濾波處理過程,實現航行位置及其誤差方差的估計。
當有多個信標時,既可以將公式(12)和公式(14)改造為多維表達式(維數等于信標個數),同樣采用卡爾曼濾波計算;也可以仍然采用單信標組合導航方法,在每一次測量得到某一信標的距離信息時,即與實時推算定位信息進行組合導航計算,而不用等到所有信標距離信息均獲得以后再進行計算,這樣放松了水聲定位對信標數量的要求,實現了可用信標數量不固定情況下的水聲定位。
從此過程可以看出,通過將推算定位模型與單信標測距模型相結合,采用卡爾曼濾波的預測-校正體制信息處理方法,實現了推算定位信息與單信標測距信息的耦合,達到了僅使用單信標距離測量信息也可實現水聲定位的功能。
3 仿真分析
對上述過程進行仿真分析,考慮如下兩種情況。
(1)單信標情況,仿真條件如下:信標位置為(-2000,-3000,-1000),單位為米(m,下同),稱為信標1。航行器初始位置為(-3000,-1000,-300),航行器水平航行,航速2m/s(約3.9節),航向120度。航行推算定位,初始位置誤差設置為x,y方向具為方差為500m的高斯白噪聲,航向測量誤差包括1度的常值誤差和方差為0.5度的高斯白噪聲;航速測量誤差包括0.1m/s的常值誤差和方差為0.1m/s的高斯白噪聲。信標距離測量誤差為方差5m的白噪聲。仿真結果如圖2、圖3所示。
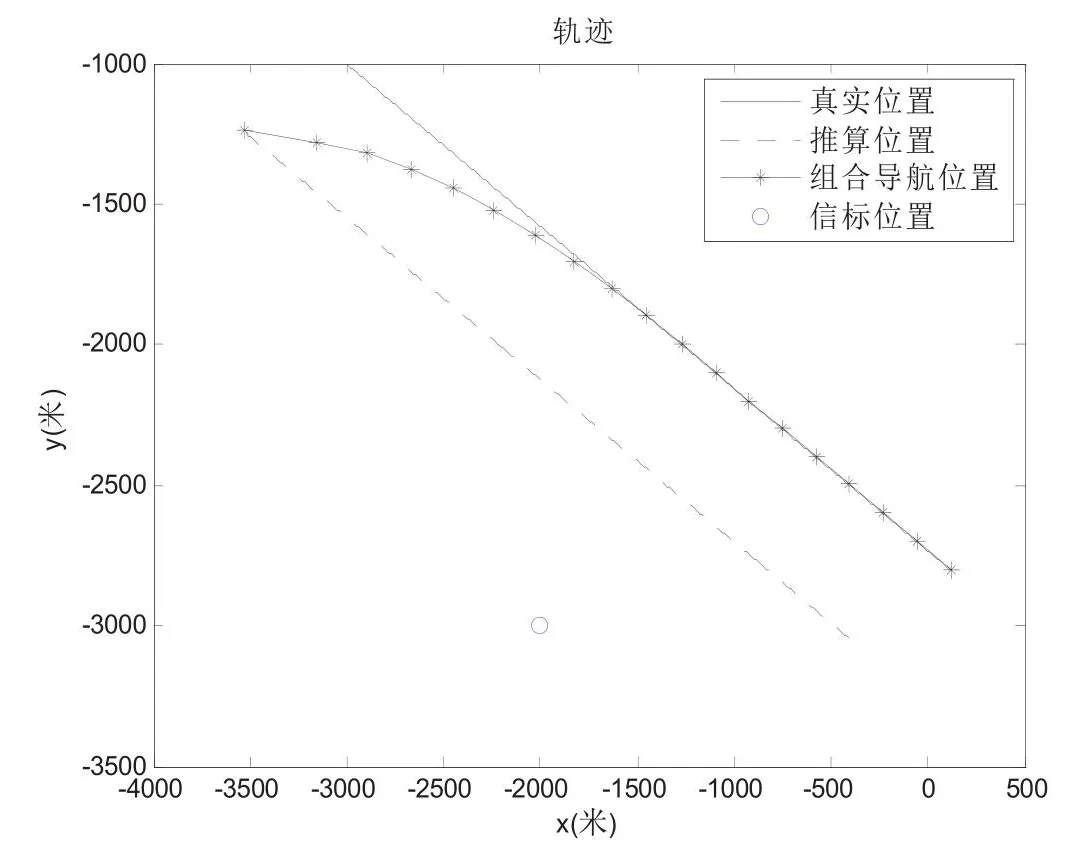
圖2 航行器定位軌跡(單信標情況)Fig.2 Positioning trajectory of UUV(single beacon)
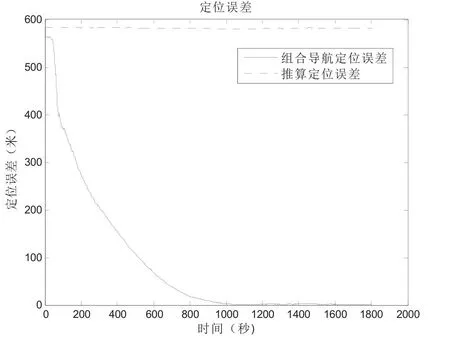
圖3 導航定位誤差曲線(單信標情況)Fig.3 Error of position(single beacon)
從仿真圖可以看出,對于近600m的初始位置誤差,在推算定位中,定位誤差緩慢增加,而組合導航可使位置誤差迅速減小,隨著測量不斷進行,組合導航定位誤差不斷減小,最終定位誤差穩定小于5m。
(2)有多個信標的情況,假設有2個信標(多于2個信標的水聲定位效果比較理想,這里不考慮),另一信標位置為(-2500,-1000,-800),稱為信標2。航行器航向135度,速度2m/s。假設在航行前600s和后600s,分別只接收信標1和信標2的信號,在航行過程中間600s,受海洋環境的影響,航行器以等概率隨機接收信號1、信號2或2個信標的信號,仿真結果如圖4-圖6所示。
從圖4和圖5可以看出,在可接收信號的信標數量不固定的情況下,利用單信標測距和推算定位組合導航方法,仍然能夠有效地對航行器進行定位,定位誤差逐漸收斂。
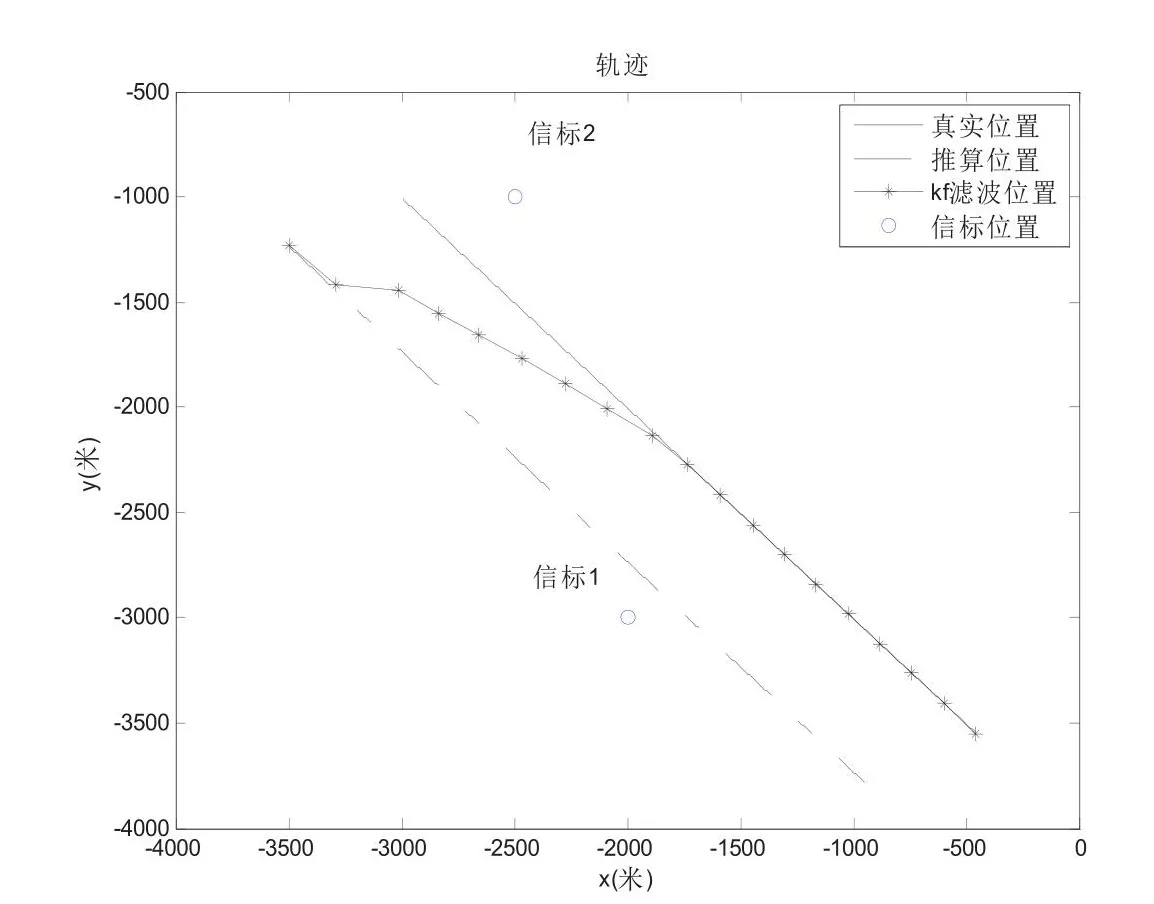
圖4 航行器定位軌跡圖Fig.4 Positioning trajectory of UUV
從圖6可以看出,航行中間階段,航行器接收信標信號的情況具有隨機性,對照圖5中相應時間段的誤差曲線,可以看出,采用本文方法,在接收信標信號具有隨機性、可用信標數量不固定的情況下,定位誤差依然能夠較好的收斂。
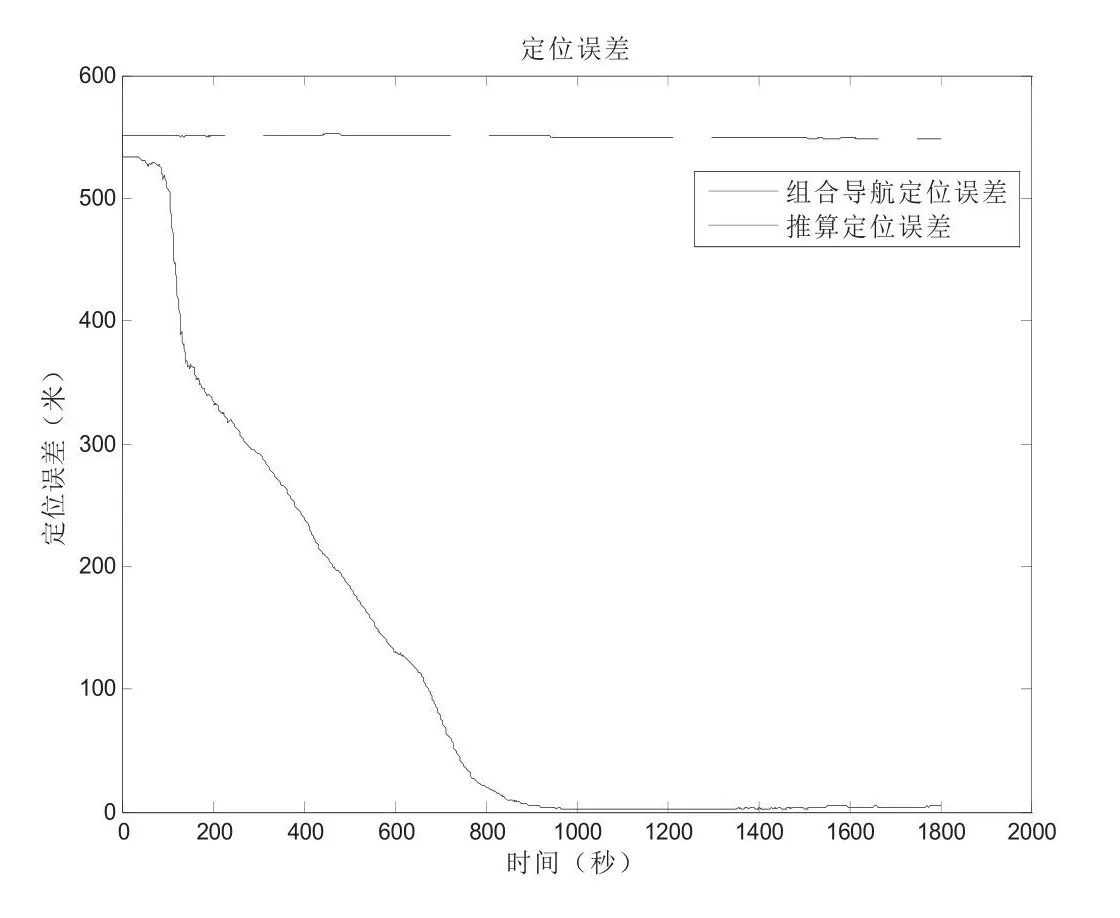
圖5 導航定位誤差曲線Fig.5 Error of position
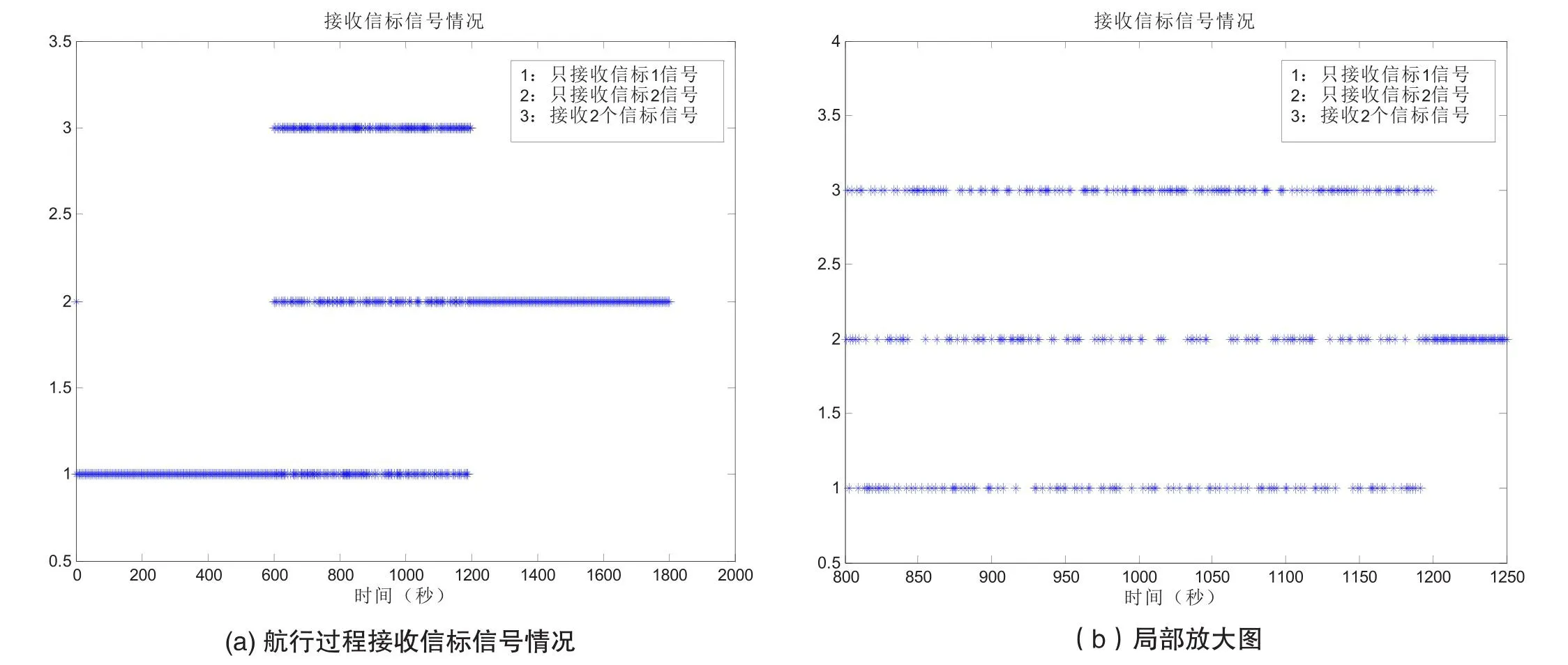
圖6 航行器接收信標信號的情況Fig.6 Beacon receive condition of UUV
在多次仿真中還發現,航行器的航跡對組合導航定位結果有一定影響,特別是當只能接收一個信標信號時。對照圖3和圖5的初始階段,可以看出第二情況仿真時,由于航跡更靠近信標1,導致定位誤差收斂相對較慢。這一現象可從控制理論對其進行解釋[5],是因為在此航跡情況下,系統的可觀測性較弱,因此組合導航定位誤差收斂較慢,在進入第二階段后,可收到不同信標信號或可收到2個信標的信號時,收斂速度加快,效果改善。
4 結語
本文所提出基于單信標測距信息/推算定位的組合導航方法,對于單信標聲學定位具有較好效果。在實際水下聲學定位的應用過程中,受海水聲波傳輸特性復雜的影響,聲信號接收具有較大的不確定性,容易導致可接收信號的信標數量不夠、信號接收不同步等情況。本文的方法具有一定的通用性,可以有效應對這些情況,具有較大的應用價值。
引用
[1]付進.長基線定位信號處理若干關鍵技術研究[D].哈爾濱:哈爾濱工程大學,2007.
[2]田坦.水下定位與導航技術[M].北京:國防工業出版社,2007.
[3]張福斌,張永清.一種利用單信標修正AUV定位誤差的方法[J].魚雷技術,2012,20(1):38-41.
[4]曹俊.基于單信標測距的水下載體定位研究[D].哈爾濱:哈爾濱工程大學,2017.
[5]嚴衛生,房新鵬,崔榮鑫.單信標測距AUV水下定位系統觀測性分析[J].中南大學學報(自然科學版),2012,43(8):3085-3090.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
