UWB定位應(yīng)用綜述
2023-03-16 10:24:54貴州健康職業(yè)學(xué)院郭永強(qiáng)于喜志黃曉芬田太權(quán)楊俊
數(shù)字技術(shù)與應(yīng)用 2023年2期
貴州健康職業(yè)學(xué)院 郭永強(qiáng) 于喜志 黃曉芬 田太權(quán) 楊俊
本文根據(jù)UWB通信基礎(chǔ)介紹了常規(guī)TOA、TDOA、AOA等算法的理論基礎(chǔ)以及定位原理和方法,以及算法的優(yōu)勢(shì)和不足;同時(shí)介紹了影響算法的視距和非視距鑒別問題和影響因素。根據(jù)研究文獻(xiàn)資料介紹了幾種鑒別視距和非視距問題的模型,同時(shí)闡述了非視距模型的測量指標(biāo),而后對(duì)于定位的擴(kuò)展應(yīng)用的三維定位問題進(jìn)行研究介紹,最后對(duì)UWB應(yīng)用進(jìn)行了闡述。
隨著家居智能化以及自動(dòng)化智慧工廠的建立,室內(nèi)定位精確度要求提高。為滿足定位精度室內(nèi)定位的研究,主要著手點(diǎn)在利用Wi-Fi、ZigBee、Bluetooth、RFID等來實(shí)現(xiàn)室內(nèi)無線定位;隨著超帶寬(Ultra-wideband, UWB)無線載波技術(shù)的發(fā)展,UWB定位的研究方法增多。UWB在2002年應(yīng)用于民用規(guī)范[1],其應(yīng)用頻率寬,相對(duì)帶寬較大,發(fā)射功率低于1mW[2]。同時(shí)定位精度高,抗干擾能力及穿透能力強(qiáng),能耗低而受到關(guān)注[3]。
UWB[4]的應(yīng)用源于Scholtz的脈沖調(diào)制的論文[5],UWB具有抗多徑和時(shí)間分辨敏感的特性[6]。因兼具定位和信息傳遞功能應(yīng)用得以擴(kuò)展[7]。應(yīng)用的研究主要集中在解決多徑和非視距問題,Lee等[8]提出的基于直射路徑的信號(hào)首次接收時(shí)間確定問題,依據(jù)UWB信號(hào)的特點(diǎn)反映出在視距情況下直射路徑的信號(hào)強(qiáng)度最強(qiáng),該方法易于接受和理解,得到了推廣應(yīng)用。Cassioli等[9]研究關(guān)于復(fù)雜環(huán)境下的非視距問題支出在非視距環(huán)境下直徑距離測量值不再是最強(qiáng)路徑,這增大了直徑測量的難度。因Guvenc等[10]提出此針對(duì)非視距環(huán)境下的路徑問題需要特殊的加以甄別。
1 UWB超帶寬算法簡述
超帶寬定位算法在獲取信息時(shí)主要是根據(jù)時(shí)間信號(hào)來確定,依據(jù)時(shí)間和信號(hào)角度等可以劃分為:接收到標(biāo)簽信息的時(shí)間(Time of Arrival,TOA)、接收到信息的時(shí)間差(Time Difference of Arrival,TDOA)、信號(hào)的往返時(shí)間(Time of Flight,TOF)以及接收到信號(hào)的角度(Direction of Arrival,DOA)或(Angle of Arrival,AOA)等[11,12]。
(1)TOA算法:TOA算法是利用基站接收到標(biāo)簽的信息時(shí)間進(jìn)行計(jì)算[13]。該算法在應(yīng)用時(shí)至少需要3個(gè)基站協(xié)同工作,同時(shí)也要保證標(biāo)簽和各基站之間的時(shí)間同步。
在進(jìn)行距離測量時(shí),依據(jù)算法公式(1)和公式(2)求解得出標(biāo)簽的坐標(biāo)位置(x,y):
其中基站設(shè)備坐標(biāo)分別為(xi,yi),被測量標(biāo)簽的坐標(biāo)為(x,y)。R為標(biāo)簽到基站的距離半徑。
從算法的測量參量分析可知該算法的定位精度嚴(yán)格依賴于距離R,與此同時(shí)標(biāo)簽和各個(gè)基站之間的時(shí)間保持高度同步,而面對(duì)不同的環(huán)境和硬件設(shè)備有不同的影響程度;同時(shí)也有時(shí)間建立方程固有的非線性問題[14]。
(2)TDOA算法:TDOA算法是以標(biāo)簽信號(hào)到達(dá)基站的時(shí)間差來進(jìn)行計(jì)算,該算法相比TOA主要在于標(biāo)簽不必與各基站保持時(shí)間的同步,各個(gè)基站時(shí)間必須是保持同步。標(biāo)簽到達(dá)主基站和參考基站兩基站的時(shí)間差為Δt,標(biāo)簽到達(dá)兩基站的距離差D=Δt×C為定值。基站坐標(biāo)為(xi,yi);設(shè)標(biāo)簽節(jié)點(diǎn)的坐標(biāo)為(x,y);D為標(biāo)簽到基站的距離。建立方程組如式(3)所示:
由此可以解算出標(biāo)簽坐標(biāo),同樣該算法的測量精度依賴于基站之間的時(shí)間同步,要保證測量數(shù)據(jù)的精確度就要保證基站間時(shí)間的同步問題。
(3)TOF定位算法:TOF(Time of Flight)定位算法即計(jì)算信號(hào)從標(biāo)簽到基站之間的往返時(shí)間的計(jì)算方法,該方法是一種測距的方法需要結(jié)合其他模型方法(例如三邊定位算法)來進(jìn)行輔助計(jì)算。該算法特點(diǎn)在于對(duì)于基站和標(biāo)簽之間的時(shí)間同步問題未作要求。基站經(jīng)過Ttat的時(shí)間處理信息,定位標(biāo)簽從發(fā)送信號(hào)到接收到應(yīng)答信號(hào)經(jīng)歷了Ttot的時(shí)間,那么定位信號(hào)往返定位標(biāo)簽和基站之間的時(shí)間為T=(Ttot-Ttat)/2,則標(biāo)簽和基站之間的距離D=C×T(C為電磁波在空氣中的傳播速度)。該方法的測量精度也依賴于時(shí)間測量的精度[15,16],由于基站和標(biāo)簽之間不必嚴(yán)格時(shí)間同步,因此算法的應(yīng)用進(jìn)一步擴(kuò)展。
(4)AOA定位算法:AOA(Angle of Arrival)算法是信號(hào)到達(dá)角度進(jìn)行定位算法,算法是利用基站的天線陣列或者明確方向的天線來進(jìn)行測量標(biāo)簽信號(hào)到達(dá)基站的角度和距離信息,求解幾何信息來計(jì)算標(biāo)簽的位置坐標(biāo),角度θ1,θ2為標(biāo)簽信號(hào)到達(dá)基站的角度,設(shè)基站坐標(biāo)為(xi,yi);標(biāo)簽的坐標(biāo)為(x,y)。根據(jù)幾何關(guān)系可得如式(4)所示:
即可求得標(biāo)簽的位置坐標(biāo)(x,y)。由于涉及到角度和時(shí)間的兩種數(shù)據(jù)的測量,所以信號(hào)也容易受到環(huán)境因素(例如環(huán)境復(fù)雜度和非視距因素)的干擾[17],因此在測量時(shí)需要高精度的天線陣列或者方向天線。
綜上所述UWB定位中算法的基本原理和方法,目前研究資料可知,在實(shí)際應(yīng)用中受復(fù)雜環(huán)境因素的影響、硬件設(shè)備性能限制、算法本身局限性等因素,僅憑單一的算法無法實(shí)現(xiàn)精確定位。因此研究者們想通過一種或多種基本模型算法的優(yōu)勢(shì)互補(bǔ)來進(jìn)行嘗試以提高精度,減小干擾因素的影響。依據(jù)時(shí)間的依賴性分析是否要求嚴(yán)格同步總結(jié)如表1所示。
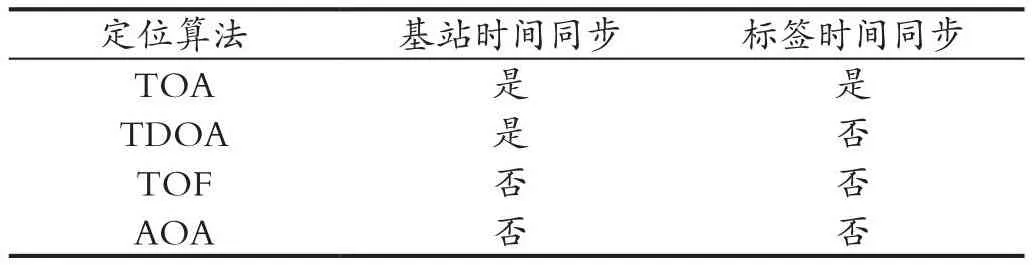
表1 時(shí)間同步關(guān)系Tab.1 Time synchronization relationship
閆雷兵等[18]提出了結(jié)合TDOA和AOA算法的定位研究,該方法主要針對(duì)當(dāng)測量到的距離到個(gè)基站相等或近似的情況下的計(jì)算求解問題,由于測量距離相等或相近在求解時(shí)利用兩步加權(quán)最小二乘算法和約束加權(quán)最小二乘算法會(huì)出現(xiàn)測量矩陣的奇異性,解決了圓形陣列中的移動(dòng)標(biāo)簽定位時(shí)出現(xiàn)測量矩陣的奇異性問題。提出利用約束加權(quán)最小二乘法的基礎(chǔ)上加以分離變量進(jìn)行避免求解困難的問題,同時(shí)本身的價(jià)值函數(shù)的重構(gòu)也表現(xiàn)出特殊的重要性。該方法不僅優(yōu)化了TDOA和AOA的測量數(shù)據(jù),也可優(yōu)化引入的附加變量中的定位數(shù)據(jù)。高健等[19]采用三次通信的TDOA和TOF結(jié)合的方法有效地提高了測量精度弱化測量時(shí)雙曲線抖動(dòng)的問題。張怡等[20]利用兩次卡爾曼濾波進(jìn)行非視距情況下的TDOA/AOA的混合定位研究。利用類正態(tài)分布在最小二乘法下的擬合建立TDOA的誤差模型處理非視距的問題,而后利用卡爾曼濾波方法對(duì)混合定位。同時(shí)對(duì)比了利用TDOA算法和靜態(tài)下泰勒級(jí)數(shù)展開下的TDOA和TDOA/AOA的預(yù)算結(jié)果,表現(xiàn)出一定的優(yōu)勢(shì)[21]。
UWB測量算法模型:以上定位算法的測量過程中涉及時(shí)間和路徑的問題,主要是基于能量或者是信號(hào)的多徑和非視距問題。信號(hào)的監(jiān)測有基于信號(hào)強(qiáng)度(Signal Strength Indicator,RSSI)的測量和利用UWB時(shí)間分辨率的TOA/TDOA等兩種類型。
RSSI是基于能量信號(hào)傳播衰減模型的測量模型,本質(zhì)上是距離的定位方法[22]RSSI模型的設(shè)計(jì)定位時(shí)要求距離滿足條件,如式(5)所示:
其中節(jié)點(diǎn)距離d,路徑損耗np,σsh零均值高斯隨機(jī)變量標(biāo)準(zhǔn)差,對(duì)數(shù)表示正態(tài)的衰落,該模型適用于參考基站和目標(biāo)比較接近的環(huán)境下,因受實(shí)際應(yīng)用環(huán)境的限制,算法的魯棒性不強(qiáng),具體體現(xiàn)在式中的距離關(guān)系。
TOA/TDOA的UWB時(shí)分辨的信號(hào)測量在視距和非視距環(huán)境下遵從電磁波信號(hào)的直達(dá)和多徑問題。多徑信號(hào)是電磁波信號(hào)在傳輸路徑上經(jīng)過周圍物體的反射或者散射形成的信號(hào)疊加現(xiàn)象。在視距情況下直達(dá)DP成分容易監(jiān)測,復(fù)雜環(huán)境下的DP信號(hào)難以檢測,進(jìn)而引起非視距環(huán)境下的非視距(NLOS)檢測的誤差。如式(6)所示為常規(guī)TOA信號(hào)檢測模型。
其中C為光速,PRN、PUN為節(jié)點(diǎn)位,||PRN-PUN||表示節(jié)點(diǎn)間距離,ηMP徑誤差,eNLOS為非視距誤差。
建模應(yīng)用過程中對(duì)誤差有不同的模型建立,在UWB信號(hào)的接收過程中多徑的影響造成DP成分的延遲或者誤檢。該模型建立的多徑誤差模型ηMP為高斯模型,如式(7)所示:
μMP、σMP為ηMP的均值和標(biāo)準(zhǔn)差,ηMP有正負(fù)偏差,假設(shè)μMP→0,引入?yún)?shù)λd對(duì)數(shù)距離,改寫ηMP如式(8)、式(9)所示:
而實(shí)際環(huán)境中UWB信號(hào)在復(fù)雜環(huán)境中的傳播有不同的特性,信號(hào)的傳播路徑是非視距的,DP衰減很快,造成接收信號(hào)的延時(shí),對(duì)于NLOS環(huán)境下的信號(hào)測量引起NLOS誤差。其誤差模型選用指數(shù)模型較為理想,如式(10)所示:
其中μN(yùn)LOS為指數(shù)分布均值,則ηMP的改寫描述定位誤差如式(11)所示:
其中w為權(quán)重因子。
從現(xiàn)有文獻(xiàn)資料分析在不同模型中建模誤差,模型有所不同,非視距的延時(shí)檢測,誤差通常表現(xiàn)為正誤差,符合高斯分布的特征,表現(xiàn)為正均值。根據(jù)以上的分析可知非視距的情況下會(huì)引起TOA估計(jì)的誤差,在實(shí)際的應(yīng)用環(huán)境中找到適當(dāng)?shù)姆椒ㄨb別視距和非視距就顯得尤為重要。
2 視距鑒別方法
在NLOS環(huán)境下的TOA誤差較大,鑒別非視距用于修正誤差提高精度是很重要的,在移動(dòng)互聯(lián)網(wǎng)中鑒別時(shí)NLOS常用來以二元假設(shè)來進(jìn)行判斷。在UWB的應(yīng)用過程中通過分析信噪比來鑒別視距和非視距的情況,分析TOA的誤差也是同樣可以做到的。那么在視距環(huán)境下的直接路徑和最強(qiáng)路徑是統(tǒng)一的,定義直接路徑的幅度值。在視距環(huán)境下的直達(dá)路徑和最強(qiáng)路徑相同歸一化其值[10]為如公式(12)所示:
在非視距環(huán)境下直達(dá)路徑有時(shí)不表現(xiàn)為最強(qiáng)路徑或者最強(qiáng)路徑測量指標(biāo)不明顯。在視距和非視距環(huán)境下的幅度值不同,肖竹等[23]的仿真實(shí)驗(yàn)結(jié)果也表明了該研究的觀點(diǎn),說明多徑分量的幅度值可以用來鑒別視距和非視距的情況。
2.1 最強(qiáng)路徑模型
在視距和非視距的情況下,直達(dá)路徑能量和多徑信道能量分布的不同,可以依據(jù)能量分布情況進(jìn)行視距和非視距的鑒別,定義最強(qiáng)路徑的能量與信道能量值的比值如式(14)所示:
其中ξ是最強(qiáng)路徑的歸一化值,λSP與ξ的大小關(guān)系表明是視距或者非視距的情況。視距情況下的直達(dá)路徑和最強(qiáng)路徑相同,表現(xiàn)為主要能量集中,在非視距情況下主要路徑能量不集中,表現(xiàn)不明顯的最強(qiáng)路徑,而區(qū)分的界限值歸一化值也是影響判斷的重要因素。
2.2 峭度
峭度反映的是隨機(jī)變量分布的數(shù)值統(tǒng)計(jì)特征,是數(shù)據(jù)集合歸一化的四階中心矩,反應(yīng)數(shù)據(jù)的峰度值大小狀況,四階距表示峰度,二階矩表示方差,陡峭度實(shí)際上反映的是數(shù)據(jù)的集中凹凸的程度,如果數(shù)據(jù)越是集中K值就越突出,表明其有更突出的峰值。那么在UWB通信的過程中依據(jù)其特性,如果K值越大則表示其為視距的概率就越大,K值越小表示為在非視距環(huán)境下的概率就越大。對(duì)于特定的信道峰度κ如式(15)所示:
其中μ|h|、σ|h|是|h(t)|的均值和標(biāo)準(zhǔn)差,h(t)是信道,κ的表現(xiàn)能夠體現(xiàn)在LOS/NLOS的信道特征,通過建立正態(tài)分布模型檢測κ值有不同的置信度值[24],如式(16)所示。
其中μκ、σκ是κ的均值和標(biāo)準(zhǔn)差。
表明無論是在實(shí)驗(yàn)室還是在實(shí)際環(huán)境下,在視距環(huán)境下的K值都明顯大于非視距下的值κ。
2.3 延時(shí)測量指標(biāo)
依據(jù)上文的分析,從能量的角度出發(fā)顯示并未體現(xiàn)UWB的時(shí)間分辨特性,從平均超量延時(shí)(MED,Mean Excess Delay)和均方根延時(shí)擴(kuò)展(RMS Delay Spread)表現(xiàn)了多徑分量的時(shí)間分辨特性。通常情況下的MED和RMS在NLOS環(huán)境下和LOS環(huán)境下有著明顯的區(qū)別,兩個(gè)測量指標(biāo)可表示為如式(17)所示:
其中τMED,τRMS也符合對(duì)數(shù)正態(tài)分布,在相同的環(huán)境下不同的τMED,τRMS值用于鑒別視距和非視距。結(jié)合通信標(biāo)準(zhǔn)數(shù)據(jù)分析[24]實(shí)驗(yàn)數(shù)據(jù)表明這點(diǎn)。
結(jié)合以上分析:在LOS環(huán)境下的能量SP最大可以認(rèn)定為DP。在延時(shí)測量指標(biāo)方面依據(jù)UWB的傳播特性,非視距環(huán)境下的MEN和RMS比視距下的限量要大,符合信號(hào)最強(qiáng)路徑直接傳播時(shí)間最快,反射和散射接收到的信號(hào)必定帶有延時(shí)特性,并且依據(jù)延時(shí)量和均方根有直接的反應(yīng)。陡峭度的概念更契合與四階距的峰度定義,也符合正態(tài)分布中的越是集中概率越大的概念。
3 數(shù)據(jù)融合UWB定位算法
定位環(huán)境的復(fù)雜性逐漸應(yīng)用于三維的定位中。單一的UWB定位表現(xiàn)出了一定的局限性。因此逐漸將傳統(tǒng)的定位數(shù)據(jù)與UWB相結(jié)合,實(shí)現(xiàn)硬件設(shè)備的互聯(lián)復(fù)用,同時(shí)加強(qiáng)了數(shù)據(jù)融合的研究。
三維UWB室內(nèi)定位中孫建強(qiáng)等[25]使用氣壓計(jì)輔助UWB進(jìn)行室內(nèi)定位方法的定位精度可以控制。定位方法應(yīng)用三邊定位法,利用三個(gè)基站一個(gè)移動(dòng)標(biāo)簽;測距運(yùn)用雙邊雙向時(shí)間差,基站和移動(dòng)標(biāo)簽無需時(shí)間同步,減少了時(shí)間不同步造成的誤差。但是要實(shí)現(xiàn)三維測量在每個(gè)樓層之間還是需要三個(gè)基站。該方法特點(diǎn)在于實(shí)現(xiàn)3D定位的方法,三維依賴的是氣壓計(jì)來處理三維問題,給處理三維問題帶來了一個(gè)新的思路,是具體到每個(gè)層次的定位依然依靠的是三點(diǎn)定位,同時(shí)在基站的應(yīng)用方面實(shí)現(xiàn)準(zhǔn)確的定位也避免不了多基站的應(yīng)用問題,也未考慮在應(yīng)用過程中信號(hào)衰減和非視距鑒別等數(shù)據(jù)問題。
李世銀等[26]基于SAE-RF的三維UWB室內(nèi)定位方法研究運(yùn)用指紋定位算法進(jìn)行3D定位,具體定位方法為以UWB的測距作為指紋采集方式,利用稀疏自編碼器(SAE)提取指紋的相關(guān)特征,而后利用隨機(jī)森林(RF)進(jìn)行誤差修正,特別是在構(gòu)建SAE-RF時(shí)為了避免SAE在低維度數(shù)據(jù)輸入時(shí)隱含層神經(jīng)單元過多導(dǎo)致的精度下降問題引入了對(duì)隱含層數(shù)據(jù)單元的稀疏性限制。對(duì)于多余的數(shù)據(jù)進(jìn)行Dropout方法[27]處理。該算法的特點(diǎn)在于運(yùn)用系數(shù)矩陣和RF回歸模型修正誤差數(shù)據(jù),高度精確的準(zhǔn)確性來源于指紋定位數(shù)據(jù)的建立和指紋匹配,所以只是利用了UWB作為指紋數(shù)據(jù)的采集,沒有利用UWB信號(hào)的信息多樣性,數(shù)據(jù)處理方面的非視距和多徑問題未做說明性的研究。
張寶軍等[28]基于DL-LSTM的UWB /INS室內(nèi)定位算法的研究中利用慣性導(dǎo)航和UWB結(jié)合的方法進(jìn)行定位研究。鑒于長短期記憶神經(jīng)網(wǎng)絡(luò)[29-31](LSTM)根據(jù)設(shè)置不同的振幅和相位數(shù)據(jù)可以學(xué)習(xí)到更加深層次的特征而提高預(yù)測定位的精度。雙層LSTM模型可以抑制UWB定位中的非視距誤差[32]。該方法運(yùn)用的慣性導(dǎo)航結(jié)合UWB的算法,用比較常規(guī)的技術(shù)手段解決UWB的非視距誤差修正,為處理過程的歸一化提出了較大誤差,從數(shù)據(jù)表示來看仿真效果較為理想。在處理室慣性導(dǎo)航數(shù)據(jù)的誤差積累和隨時(shí)間的漂移問題[33]未得到嚴(yán)格的控制,進(jìn)而影響到慣性導(dǎo)航數(shù)據(jù)的準(zhǔn)確性,而在數(shù)據(jù)融合層,主要依據(jù)的還是距離的測量值,鑒于最小二乘法數(shù)據(jù)標(biāo)定模型本身的線性問題,其數(shù)據(jù)值選取和前期處理如何得以保障可靠性需要深入處理才能夠得以應(yīng)用,確保數(shù)據(jù)模型的準(zhǔn)確性。
基于通信技術(shù)的無線傳感網(wǎng)絡(luò)技術(shù)[34]轉(zhuǎn)而對(duì)其帶寬特性的定位研究,研究對(duì)象多在于NLOS的誤差處理;盛坤鵬等[35]非視距誤差改正的超寬帶定位模型研究。曾玲等[36]研究表明非視距對(duì)移動(dòng)標(biāo)簽的影響問題有助于解決室內(nèi)移動(dòng)定位的研究。閆雷兵等[20]研究了移動(dòng)標(biāo)簽位于矩陣中心時(shí)的求解奇異矩陣的情況。基于以上分析,重點(diǎn)的研究目前還是在尋找合理的數(shù)據(jù)處理方法來解決非視距現(xiàn)象帶來的干擾問題,總體思路還是鑒別估計(jì)運(yùn)算和多徑問題。
4 結(jié)論
本文介紹了UWB通信的理論基礎(chǔ)和方法,分析了TOA、TDOA、TOF和AOA的基本算法,以及兩者或者多種定位基礎(chǔ)算法相結(jié)合的定位原理和定位方法,介紹其影響的主要因素。闡明了TOA、TDOA的嚴(yán)格要求基站時(shí)間同步的問題,以及雙向時(shí)間監(jiān)測TOF及算法的進(jìn)一步擴(kuò)展和標(biāo)簽與基站的時(shí)間同步。在模型確定時(shí)分析RSSI模型,陡峭度模型,超量延時(shí)的數(shù)據(jù)信號(hào)的分析問題,鑒別視距和非視距的信息處理,重點(diǎn)在非視距的鑒別和數(shù)據(jù)運(yùn)用,同時(shí)介紹了多數(shù)據(jù)融合的定位應(yīng)用。基于氣壓計(jì)的三維UWB定位擴(kuò)展應(yīng)用,利用氣壓計(jì)減少三維定位中的多基站的問題,減少了相對(duì)成本,但是具體定位時(shí)的非視距問題和信號(hào)損耗,基站時(shí)間同步等數(shù)據(jù)問題未做詳細(xì)的處理;以及記憶神經(jīng)網(wǎng)絡(luò)的問題,對(duì)非視距做闡述運(yùn)用慣性導(dǎo)航修正數(shù)據(jù)解決誤差問題,慣性導(dǎo)航的本身數(shù)據(jù)的誤差積累和漂移問題值得注意;以及數(shù)據(jù)標(biāo)定的最小二乘法本身模型的線性關(guān)系在實(shí)際應(yīng)用中并不適用。指紋定位的方法,將前言經(jīng)驗(yàn)方法運(yùn)用到UWB的過程中利用稀疏編碼建立指紋庫,同時(shí)考慮到非視距環(huán)境的非線性關(guān)系進(jìn)行回歸修正,表明效果較好,但是指紋庫的模型建立以及UWB信號(hào)的采集需要更加關(guān)注,能夠運(yùn)用到準(zhǔn)確的測距信息。UWB定位技術(shù)已經(jīng)應(yīng)用到室內(nèi)定位、空天相機(jī)位置追蹤[37]、無線網(wǎng)絡(luò)通信應(yīng)用、感知物體信息[38]、醫(yī)療成像研究[39]、深井和惡劣環(huán)境便攜設(shè)備等現(xiàn)實(shí)應(yīng)用領(lǐng)域[40,41]。因其具有良好的通信特帶寬,時(shí)分辨特性,結(jié)合硬件輔助設(shè)備實(shí)現(xiàn)便捷低功耗,同時(shí)降低應(yīng)用成本問題,表明今后的實(shí)際前景更加廣泛。
引用
[1]趙亮,劉雙平,金梁,等.超寬帶系統(tǒng)的功率譜密度限制問題研究[J].電信科學(xué),2011,27(2):34-39.
[2]王一強(qiáng),孫罡,侯祥博.UWB 超寬帶技術(shù)研究及應(yīng)用[J].通信技術(shù),2009,42(3):70-72+75.
[3]許波,賀鵬飛,段嗣妍.無線體域網(wǎng)信道特性研究[J].電信科學(xué),2011,27(3):78-84.
[4]WIN M Z.SCHOLTZ R A.Hnpulse Radio:How it Works[J].IEE Commun Lett,1998,2(2):36-38.
[5]SCHOLTZ R.Multiple Access with Time-hopping Impulse Modulation[C]// Military Communications Conference.IEEE,1993.
[6]ROY S,FOERSTER J R,SOMAYAZULU V S,et al.Ultrawideband Radio Design:the Promise of High-speed,Shortrange Wireless Connectivity[J].Proceedings of the IEEE,2004,92(2):295-311.
[7]PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[8]LEE J Y,SCHOLTA R A.Ranging in a Dense Multipath Environment Using an UWB Radio Link[J].Proc.ieee J.sel.areas Commun,2002,20(9):1677-1683.
[9]CASSIOLI D,WIN M Z,VATALARO F,et al.Low Complexity Rake Receivers in Ultra-Wideband Channels[J].IEEE Transactions on Wireless Communications,2007,6(4):1265-1275.
[10]GUVENC I,CHONG C C,WATANABE F.NLOS Identification and Mitigation for UWB Location Systems[C]//IEEE Wireless Communications &Networking Conference.IEEE,2007.
[11]ZHAO G,NIU H.Research and Application of Indoor Positioning Based on UWB[C]//Third International Conference on Cyberspace Technology (CCT 2015).IET,2015.
[12]李曉龍.基于UWB的移動(dòng)定位算法研究[D].呼和浩特:內(nèi)蒙古大學(xué),2016.
[13]HONG J M,KIM S H,LEE J G,et al.Indoor Position Monitoring System Using UWB Module[A].Advanced Science and Industry Research Center.Proceedings of 2018 3rd International Conference on Control,Automation and Artificial Intelligence (CAAI 2018)[C]//Advanced Science and Industry Research Center:Science and Engineering Research Center,2018:3.
[14]朱國輝,馮大政,向平葉,等.傳感器誤差情況下的線性校正TOA定位算法[J].系統(tǒng)工程與電子技術(shù),2015,37(3):498-502.
[15]游小榮,裴浩,霍振龍.一種基于UWB的三邊定位改進(jìn)算法[J].工礦自動(dòng)化,2019,45(11):19-23.
[16]王錦濤,皇甫一鳴,李哲舟,等.基于 UWB 測距技術(shù)的室內(nèi)定位研究[J].通信電源技術(shù),2018,35(5):50-53+56.
[17]馬婧.基于UWB信號(hào)的單基站定位算法研究及AOA定位研究[D].青島:中國海洋大學(xué),2013.
[18]閆雷兵,陸音,張業(yè)榮.基于改進(jìn)最小二乘算法的TDOA/AOA定位方法[J].電波科學(xué)學(xué)報(bào),2016,31(2):394-400.
[19]高健,陸陽,李慶巧,等.采用三次通信的TOF與TDOA聯(lián)合定位算法[J].電子測量與儀器學(xué)報(bào),2020,34(3):66-73.
[20]張怡,席彥彪,李剛偉,等.基于卡爾曼濾波的TDOA/AOA混合定位算法[J].計(jì)算機(jī)工程與應(yīng)用,2015,51(20):62-66.
[21]孔維炯,丁志中,方福柱.基于TDOA的高精度無線定位算法分析與實(shí)現(xiàn)[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2019,42(6):756-762.
[22]劉洋,楊樂,郭福成,等.基于定位誤差修正的運(yùn)動(dòng)目標(biāo)TDOA/FDOA無源定位方法[J].航空學(xué)報(bào),2015,36(5):1617-1626.
[23]肖竹,黑永強(qiáng),于全,等.脈沖超寬帶定位技術(shù)綜述[J].中國科學(xué)(信息科學(xué)),2009(10):1112-1124.
[24]GUVENC I,CHONG C C,WATANABE S,et al.NLOSIdentification and Weighted Least-Squares Localization for UWB Systems Using Multipath Channel Statistics[J].EURASIP Journal on Advances in Signal Processing,2008(6):1-14.
[25]孫建強(qiáng),尚俊娜,劉新華,等.氣壓計(jì)輔助的UWB室內(nèi)定位方法[J].傳感器與微系統(tǒng),2021,40(6):30-33.
[26]李世銀,朱媛,劉江,等.基于SAE-RF的三維UWB室內(nèi)定位方法研究[J].傳感器與微系統(tǒng),2021,40(8):46-49.
[27]SRIVASTAVA N,HINTON G,KRIZHEVSKY A,et al.Dropout:A Simple Way to Prevent Neural Networks from Overfitting[J]Journal of Machine Learning Research,2014,15(1):1929-1958.
[28]張寶軍,陳曦,廖延娜,等.基于DL-LSTM的UWB/INS室內(nèi)定位算法[J].傳感器與微系統(tǒng),2021,40(10):147-150.
[29]姚順宇,王志武,顏國正.雙層雙向長短期記憶應(yīng)用于云軌精確定位[J].光學(xué)精密工程,2020,28(1):166-173.
[30]李明曉,張恒才,仇培元,等.一種基于模糊長短期神經(jīng)網(wǎng)絡(luò)的移動(dòng)對(duì)象軌跡預(yù)測算法[J].測繪學(xué)報(bào),2018,47(12):1660-1669.
[31]段曉磊,劉翔,陳強(qiáng),等.基于粒子濾波與LSTM網(wǎng)絡(luò)對(duì)未標(biāo)記AGV的追蹤方法[J].傳感器與微系統(tǒng),2020,39(2):37-39.
[32]鮑小雨,王慶,陽媛,等.一種抑制NLOS誤差的UWB定位方法[J].傳感器與微系統(tǒng),2019,38(9):9-12.
[33]李賀龍,于海波,何嬌蘭,等.基于數(shù)據(jù)融合方法的智能表運(yùn)行剩余壽命[J].電測與儀表,2019,56(18):126-133.
[34]GEZICI S,TIAN Z,GIANNKIS G B,et al.Location Via Ultrawideband Radios-a look at Positioning Aspect of Future Sensor Network[J].IEEE Signal Process Mag,2005,22(2):70-84.
[35]盛坤鵬,王堅(jiān),李晨輝,等.非視距誤差改正的超寬帶定位模型研究[J].測繪科學(xué),2021,46(3):40-47.
[36]曾玲,彭程,劉垣.基于非視距鑒別的超帶寬室內(nèi)定位算法[J].計(jì)算機(jī)應(yīng)用,2018,38(S1):131-134+139.
[37]NI J,ARNDT D,NGO P,et al.UWB Tracking System Design for Free-flyers[J].In:Proceeding of Space 2004 Conference and Exhibit AIAA.San Diego,2004:1-9.
[38]HUSSAIN M G M.Ultra-wideband Impluse Radar-an Overview of the Principles[J].IEEE Aerosp Electron Syst Mag,1988,13(9):9-14.
[39]CHEN Y F,GUNUWAN E,KIM Y,et al.UWB Microwave Imaging for Breast Cancer Detection:Tumor/Clutter Identification Using a Time of Arrival Data Fusion Method[C]//IEEE Antennas&Propagation Society International Symposium.IEEE,2006:255-258.
[40]陳新科,喻川,文智力.UWB定位技術(shù)在煤礦井下的應(yīng)用[J].煤炭科學(xué)技術(shù),2018,46(S1):187-189.
[41]高思琪,孫建平.UWB定位技術(shù)的應(yīng)用研究[J].儀器儀表用戶,2019,26(3):77-82.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
