電力推進船舶低電壓故障穿越技術研究
2023-03-17 00:18:40殷進軍
船電技術 2023年2期
汪 敏,殷進軍
應用研究
電力推進船舶低電壓故障穿越技術研究
汪 敏,殷進軍
(武漢船用電力推進裝置研究所,武漢 430064)
低電壓故障穿越技術是電力推進船舶的重要功能。本文以中海油某型雙燃料電推PSV為例,通過分析不同短路點,歸納短路試驗試驗點選取方法。隨后,針對欠壓引起的非故障母排發電機電壓超調,指出需通過勵磁調節器的正確配置予以限制。最后,對各關聯系統的設計原則進行了總結。依照本文方法,可有效避免短路故障造成的全船失電。
電力推進 低電壓穿越 短路 自動電壓調節
0 引言
對于船舶電網設計,低電壓故障穿越是一個較新的概念。隨著電推船的日益增多,低電壓穿越技術的重要性日益凸顯。
不同于陸上電網,船舶電網設計中對低電壓故障穿越暫時沒有明確的國家標準。
借鑒陸上電網,可對船舶電網的低電壓故障穿越做如下定義:當電力系統中出現短路故障時,針對母線電壓的快速跌落,電網中的重要設備需持續保持運行狀態,直到電網中的故障被準確定位并切斷隔離[1]。
當前各主要船級社規范中僅對采用Close Bus-Tie或Close Ring電網設計的動力定位船舶提出電網低電壓故障穿越功能的要求。但是,對于非閉環電網電力推進船舶,低電壓故障穿越的意義同樣重要[2-3]。
短路故障發生后,通過選擇性保護,一般都能通過母聯開關將故障母排切除,但是,非故障母排成功進行低電壓穿越后,又會因為發電機強勵,引發過壓故障,仍然使全船失電或失去動力,影響航行安全[5]。
因此,需要對電力推進船舶低電壓故障穿越功能進行針對性設計,選取合適的短路點進行仿真,有條件時可進行實船驗證[4]。
本文以中海油某型雙燃料電推PSV為例,對短路試驗的短路點的選取進行分析,對影響低電壓故障穿越的各因素進行歸納。
1 短路試驗方案
1.1 基本配置
該船主要負載單線圖見圖1。機組為3臺920 kW雙燃料機組。主推進設備為2臺1030 kW電機,由變頻器驅動。側推為2臺500 kW定距槳。
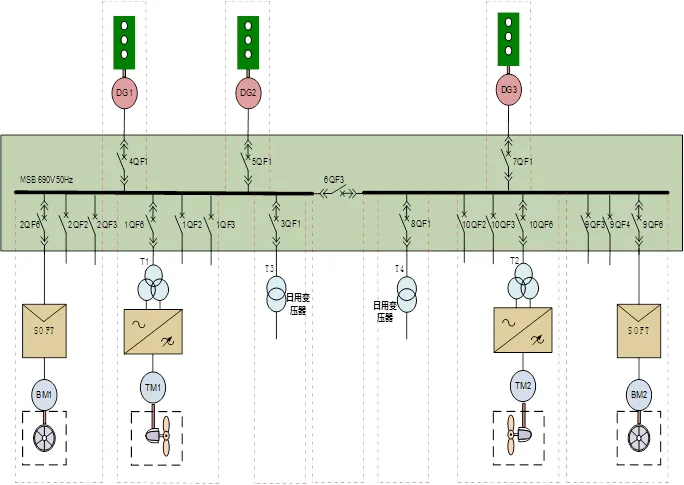
圖1 主要負載單線圖
為使短路試驗對整個電力系統影響最小,短路試驗在母聯開關斷開時模擬,只針對右舷。右舷1臺發電機組在網時,右舷主推進支路處于工作狀態。于右舷選取一開關作為試驗開關,對母聯開關進行模擬。另引入一短接開關,作為短路點。進行短路試驗時,試驗開關應先于短接開關跳開,確保發電機不因為欠壓或者過壓分閘。
短接開關采用施耐德NW直流系列斷路器,額定電流4000 A,額定短時耐受電流85kA(1s)(DC)。該直流斷路器應用在本交流系統中作為短接開關,短時耐受電流能力可滿足要求。
1.2 方案1
選取右側推控制屏內的9QF3開關為試驗開關。試驗方案分別見圖2。
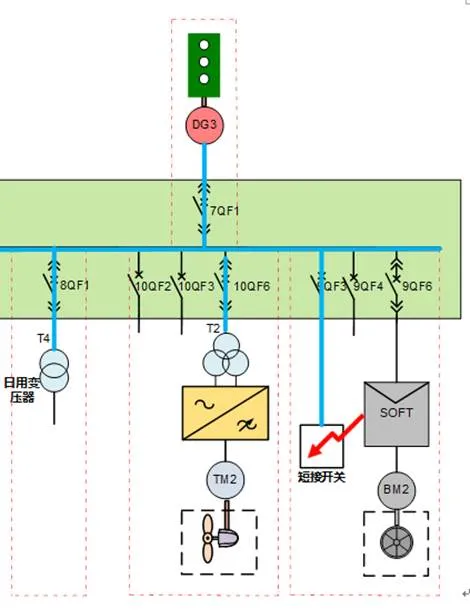
圖2 試驗方案1
各開關之間的協調性曲線如圖3所示。在試驗過程中,發生短路時,試驗開關瞬時分斷,短接開關和發電機開關不分斷。
根據該船短路計算報告,1臺機組在網時,當690 V配電支路開關9QF3短路,對稱短路電流I值為6.78 kA,峰值短路電流i值為17.29 kA。此時支路開關9QF3瞬時分斷,發電機開關不分斷。
由分析可知,短接開關短路后,支路開關9QF3瞬時分斷,此時母線電壓波動情況不明顯,可能還未降低就重新恢復。故需考慮采用較大的支路開關作為試驗開關。
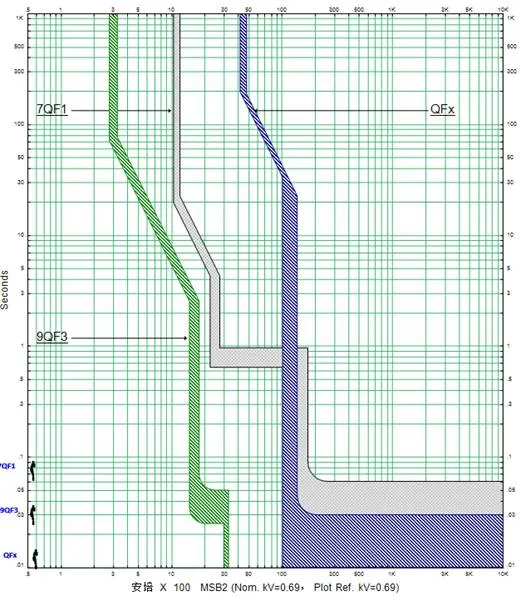
圖3 方案1協調性曲線
1.3 方案2
選擇右舷艏側推主電機啟動柜開關9QF6為試驗開關,試驗方案見圖4。
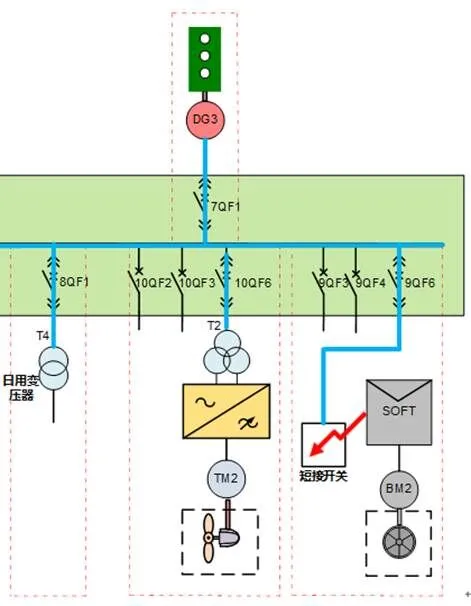
圖4 試驗方案2
各開關之間的協調性曲線如圖5所示。
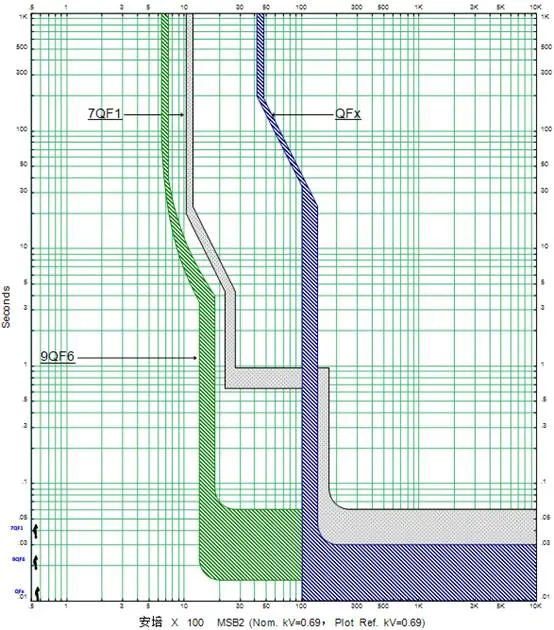
圖5 方案2協調性曲線
根據圖5,發生短路時,試驗開關瞬時分斷,短接開關和發電機開關不分斷。另由短路計算報告可知,當1臺機組在網,690 V配電支路開關9QF6短路,對稱短路電流I值為6.78 kA,峰值短路電流i值為17.29 kA。短路情況下9QF6的分斷時間20 ms左右。
由分析可知,選擇配電板上現有的開關作為試驗開關,短路持續的時間很短,為保證試驗效果,短路持續時間需達到200 ms,應該重新選取短路接入開關。
1.4 方案3
設計短路試驗柜,將短接開關與新的試驗開關均裝入試驗柜內。方案見圖6。
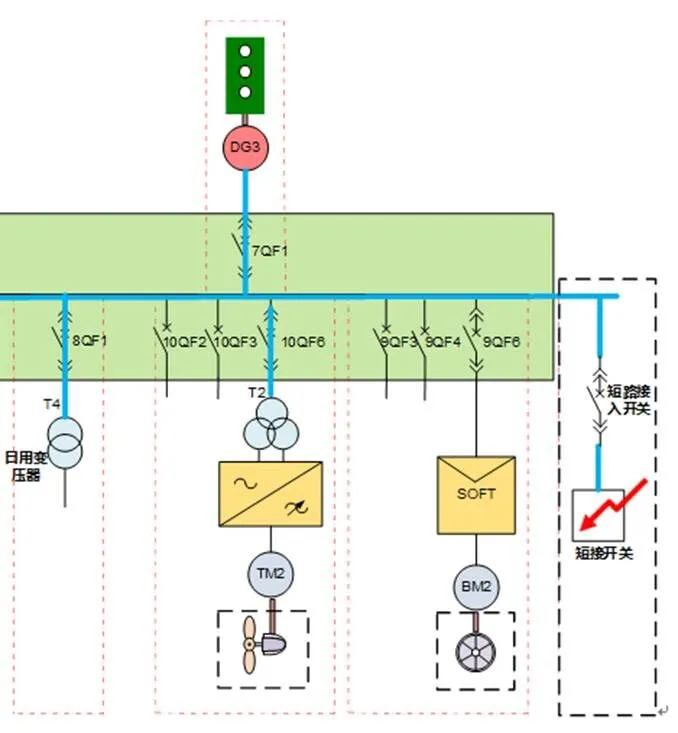
圖6 方案3協調性曲線
各開關之間的協調性曲線如圖7所示
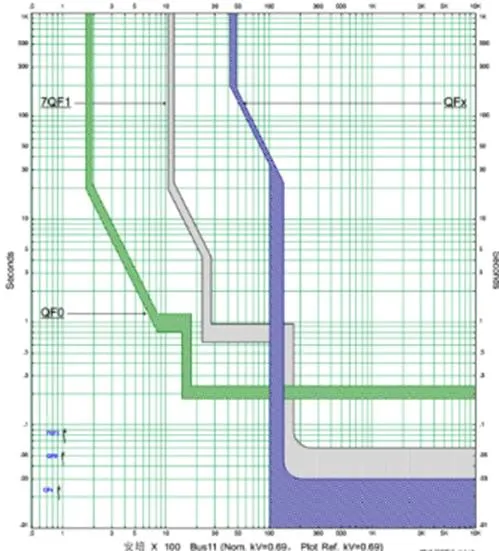
圖7 方案3協調性曲線
根據圖7,發生短路時,試驗開關短延時分斷,短接開關和發電機開關不分斷。由短路計算報告可知,當1臺機組在網,690 V配電支路開關短路,對稱短路電流I值為6.78 kA,峰值短路電流i值為17.29 kA。短路時QF0的分斷時間約200 ms。
綜上,應選擇方案3為實船短路試驗點。
2 勵磁調節器參數
短路故障發生后,整個母排均處于欠壓狀態,故障母排被切除后,非故障段母排仍處于欠壓狀態。此時發電機的自動調壓裝置(AVR)進入強勵狀態,迅速將電壓拉回可接受的范圍之內。如果強勵參數設置不當,則非故障母排設備,尤其是推進設備有可能因為欠壓故障停止運行[5]。
但是進入強勵過程,電壓會迅速升高,當故障母排被切除后,非故障母排在網機組有可能會因超調使電壓繼續升高,導致推進變頻器觸發過壓故障停機,使船舶失去航行動力;或者因為并車單元(如PPU)觸發過壓保護,使發電機分閘,仍然造成全船失電。
為了確保低電壓穿越后,電網能同時進行過電壓穿越,需要對勵磁調節器進行合理的設置。根據勵磁調節器設置值,正確設置并車單元(PPU保護值)
2.1 AVR過壓參數設置
發電機的AVR采用巴斯勒DECS-150數字式勵磁調節器。發電機過壓一般分為兩級,第一級過壓保護設置為1.25倍額定電壓,延時0.5 s,第二級過壓保護設置為1.15倍額定電壓,延時2~5 s。
按照《旋轉電機定額和性能》(GB/T755-2019/IEC 60034-1:2017)的標準要求,發電機可在1.08倍額定電壓情況下持續工作,如圖8所示。

圖8 發電機電壓和頻率的限值
2.2 AVR過勵參數設置
為減小強勵造成的過壓,可適當調整OEL過勵值,減小AVR的強勵程度,電壓上升值會相應減小。但是,減小OEL過勵值會減小到短路時饋送的短路電流大小,影響到開關的短路跳閘和電力系統保護定值的調整,需要綜合考慮。
2.3 AVR調節參數設置
AVR一般采用PID控制,不同的PID控制參數電壓的調節曲線不同,可適當調整PID參數,如減小比例參數K值,減小電網電壓的超調量,從而避免觸發過壓保護。但是,調整PID參數值會影響到發電機組的加載特性,需要綜合考慮。
3 關聯系統設計
實現故障穿越,不但要求機組控制及開關保護裝置正確選取和配置,對于各關聯系統也提出了更高的要求。
1)推進變頻器需要開啟動能緩沖功能,當電源電壓跌落時將推進電機作為發電機向變頻器直流母排回饋能量,以保證在故障穿越期間變頻驅動系統始終保持合閘狀態[1]。
2)推進變頻器在設計時,需要保證風冷、水冷等輔助裝置在短暫停止工作時,不會立即發出故障停止信號,并且保證各輔助裝置在電力恢復工作后,自動恢復工作。延時時間至少大于故障穿越時間[6]。
3)發電機輔助系統參照第(2)條設計。
4)關聯系統的供電開關不設欠壓保護或需設置合理的欠壓時間。控制系統采用冗余供電。
4 結論
在低電壓穿越的整個過程中,短路故障未切除時會產生欠壓,短路故障切除后會產生過壓。欠壓和過壓是同一故障的兩個階段,需要以仿真結合實船短路試驗的方式予以設計與驗證。
為確保全船在低電壓故障穿越時不失去航行動力,各關聯系統也必須參照低電壓故障穿越的需求進行設計。
[1] 龐路, 宋依群. 動力定位船閉環電網故障穿越功能實現方法探究[J]. 船舶, 2020, 31(4): 1-6.
[2] 劉一星, 蔡梅園, 陳寶剛, 等. 雙饋風力發電機組低電壓穿越電氣模型[J]. 船舶工程, 2019, 41(S1): 272-275, 278.
[3] 黃少青. DP2自升式平臺環網電站關鍵技術[J]. 船舶工程, 2020, 42(S1): 468-472.
[4] 劉雄航. 基于超級電容儲能的船用光伏并網系統研究[D]. 武漢: 武漢理工大學, 2020.
[5] 呂世家. 船舶電力推進系統直流母線穩定控制及低電壓穿越技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2013.
[6] 陶正敏. 變頻器的防低電壓穿越技術應用[J]. 集成電路應用, 2022, 39(3): 108-109.
Research on low voltage ride through strategy of electrical propulsion marine
Wang Min, Yin Jinjun
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.14
A
1003-4862(2023)02-0024-04
2022-04-25
汪敏(1984-),男,高級工程師。研究方向:船舶電力系統。E-mail: wangminhbhs@163.com
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
電力工程技術(2014年1期)2014-03-20 14:19:06
