帶式輸送機托輥故障檢測方法
2023-03-18 09:24:44武國平
工礦自動化 2023年2期
武國平
(國家能源集團準能集團有限責任公司,內蒙古 鄂爾多斯 017000)
0 引言
帶式輸送機作為煤炭運輸過程中的重要設備,具有長距離運輸、大體量運輸、持續作業等優點[1]。托輥作為帶式輸送機最重要的部件,長期運行時但極易產生損壞。如果不能及時發現并更換損壞的托輥,會使輸送帶產生磨損、斷裂等問題,增加運行維護費用,降低工作效率。傳統托輥故障檢測一般采用人工巡檢方式,但由于個人經驗水平不同、主觀意愿偏差,導致效率低,易引起誤判和漏檢。因此,實現高精度故障托輥自動化巡檢,具有重大意義。
近年來,智能巡檢機器人逐漸應用于帶式輸送機故障檢測領域[2-4]。朱劍鋒[5]設計了基于紅外檢測技術撕裂事故在線檢測系統,通過色溫圖像進行帶式輸送機健康狀態判定,但易受氣溫和陽光照射干擾,導致識別精度不穩定,且成本較高。韓濤等[6]將信息融合技術引入礦用輸送機托輥軸承故障診斷中, 通過對托輥軸承故障特征信息的提取,利用神經網絡技術和Dempster-Shafer 證據理論對其進行數據融合,實現對托輥軸承故障的融合診斷,但該方法工程應用難度極大。孫維等[7]提出了利用相干脈沖光的后向瑞利散射來實現托輥振動信號檢測,從而實現故障診斷,但故障托輥定位誤差較大。曹貫強[8]提出了一種基于小波去噪和反向傳播?徑向基函數(back propagation-Radial Basis Function,BP-RBF)神經網絡的托輥檢測方法,但識別精度仍不高。郝洪濤等[9]提出了基于完全噪聲輔助集合經驗模態分解、主成分分析和魯棒性獨立分量分析方法,以實現音頻信號的去噪,采用支持向量機(Support Vector Machine,SVM)實現分類,但該方法未充分利用信號中的特征。伊鑫等[10]采用梅爾頻率倒譜系數(Mel Frequency Cepstrum Coefficient, MFCC)對聲音信號提取,并采用K 鄰近方法(K-Nearest Neighbor,KNN)實現一級健康指標,采用SVM 實現二級健康指標,但托輥故障類型識別精度仍較低,且一級健康指標還需人為復查。蔡安江等[11]提出了基于特征級與決策級的雙層融合故障準確診斷方法,故障識別率達97%,但該方法的信號采集難度大,托輥故障種類識別單一。葛江華等[12]利用多傳感器信息融合的二階張量特征作為輸入,構建了一個支持張量機和集成矩 陣 距 離 測 度(Assembled Matrix Distance Metrix,AMDM)的KNN 分類器決策融合診斷模型,由概率分配值決策6 類托輥狀態,但太過依賴融合傳感器數目和參數,工程應用難度大。
現有托輥故障大多通過聲音、可見光、紅外和振動等信號進行檢測,其中大多存在信號采集難度大、識別精度低和穩定性較差等問題,很難投入工程應用。針對上述問題,本文提出了一種基于融合信號(Time-Frequency-MFCC,TFM)及多輸入一維卷積神經 網 絡(Multi-Input One-Dimensional Convolutional Neural Network,MI?1DCNN)的帶式輸送機托輥故障檢測方法。首先對采集的音頻信號進行小波閾值降噪,然后基于時域、頻域、MFCC 及其一階二階差分系數進行拼接,得到TFM,并作為特征參數,最后采用MI?1DCNN 進行特征提取,并采用Softmax 函數實現正常托輥和故障托輥的分類識別。
1 故障檢測方法
基于TFM 及MI?1DCNN 的帶式輸送機托輥故障診斷流程如圖1 所示。首先,通過拾音器采集帶式輸送機沿線托輥運行的音頻信號,采用dB4 小波無偏風險估計閾值降噪法對信號進行預處理,消除背景噪聲,提高信噪比。然后,對降噪音頻信號的時域、頻域和MFCC 及其一階二階差分系數進行歸一化處理,最后進行拼接,得到TFM。最后,將TFM 輸入到多尺度卷積核的MI?1DCNN 模型,在CNN 末端進行特征融合,通過Softmax 函數完成對正常托輥和故障托輥的分類識別,實現通過音頻信號對帶式輸送機托輥的故障診斷,并根據編碼器識別的托輥編號進行故障定位。
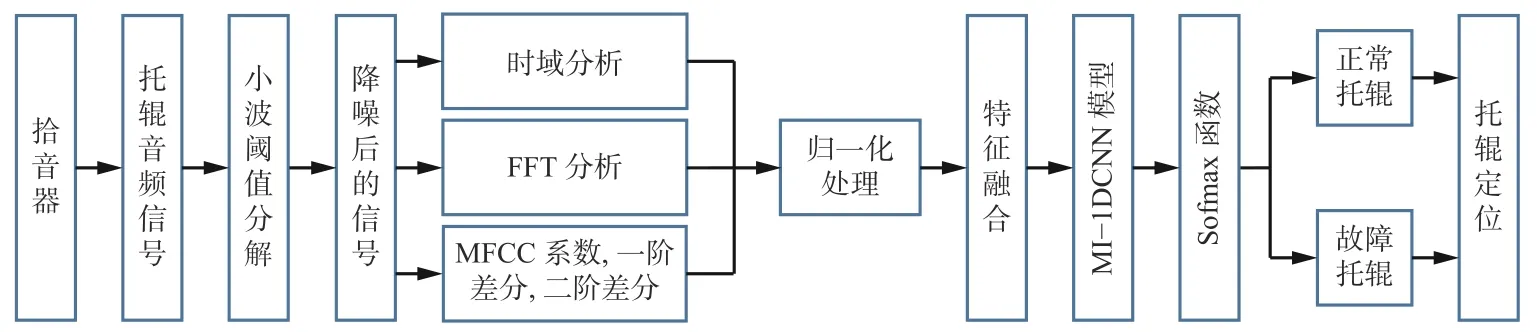
圖1 基于TFM 及MI?1DCNN 的輸煤傳送機托輥故障診斷流程Fig. 1 Fault diagnosis process of belt conveyor idle based on time-frequency-MFCC and multi-input one-dimensional convolutional neural network
1.1 小波閾值降噪
小波分析是一種多尺度的時頻域分析方法[13],將信號分解成近似分量與細節分量。近似分量表征信號的高尺度,即低頻分量;細節分量表征信號的低尺度,即高頻分量。對于含有噪聲的信號,其噪聲成分主要集中在細節分量中。
小波閾值降噪是通過選取一個合適的閾值,來有效地保留有用信號并去除噪聲信號。小波閾值降噪過程如圖2 所示。首先設置一個臨界閾值 λ,對信號進行離散小波變換,得到低頻分量A1和高頻分量D1; 然后對高頻分量D1進 行閾值分解,大于閾值 λ的小波系數為有用信號分量,小于閾值 λ的小波系數為噪聲信號,保留有用信號分量并將噪聲信號分量置零;最后將低頻分量A1繼 續分解為A2和D2,以此類推,對閾值處理后的高頻分量D′1,D′2,···,D′N(N為小波分解層數)和最后一層低頻分量AN進行離散小波逆變換,得到過濾掉噪聲信號分量并保留了有用信號分量的音頻信號。
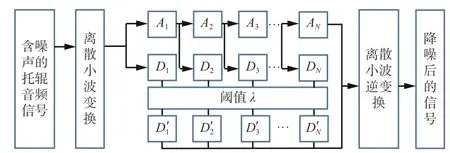
圖2 小波閾值降噪過程Fig. 2 The wavelet threshold denoising process
本文選用dB4 小波無偏風險估計閾值對托輥音頻信號進行3 層分解[14-15],在盡可能保留有用信號的情況下,提升信號信噪比,為后續多維度TFM 做準備。
1.2 TFM
為了充分體現托輥聲音的故障信息,對降噪音頻信號的時域、頻域和MFCC 及其一階二階差分系數各自進行歸一化處理和拼接,作為模型的輸入參數,從不同映射域中體現故障音頻信號特征。
1.2.1 時域信號
時域信號的關鍵就是選取最佳樣本點數,樣本太少,無法有效反映托輥故障特征,樣本太多,容易增大硬件運算成本。以采樣頻率、輸送帶運行速度、托輥半徑、機器人運行速度為研究對象,保證巡檢機器人運行在托輥最短垂直距離前后50 mm 范圍內,托輥能完整運行1 圈,最終得出樣本點數為1 000。
1.2.2 頻域信號
采用帶通濾波器對音頻信號進行濾波處理,并通過快速傅里葉變換(Fast Fourier Transform,FFT)得到頻域信號。選取頻段為28~3 800 Hz 的信號作為頻域信號。
1.2.3 MFCC 及其一階二階差分系數
MFCC 是聲音識別相關研究中常用的聲音特性分析方法,MFCC 特征提取主要由預處理、離散傅里葉 變 換(Discrete Fourier Transform,DFT)、梅 爾 濾波、離散余弦變換、差分計算等組成[16-17],其流程如圖3 所示。
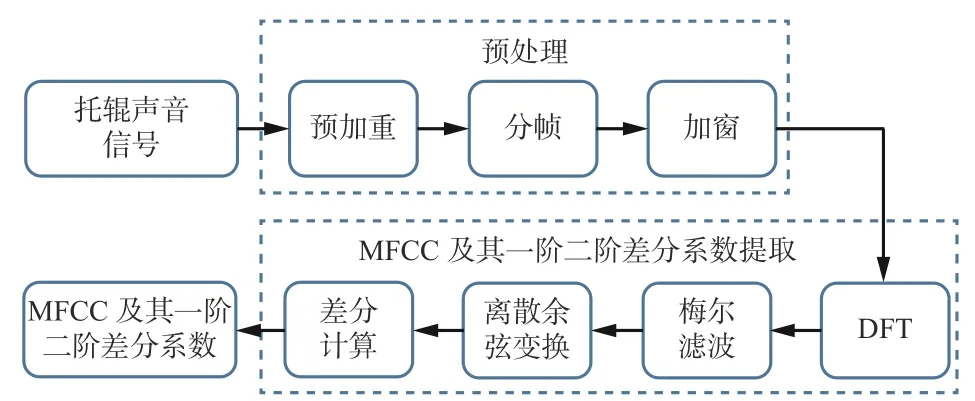
圖3 MFCC 特征提取流程Fig. 3 MFCC feature extraction process
1) 對原始信號進行預加重、分幀、加窗處理。
式中l(i)為采樣點i的窗函數值,i=1,2,…,n,n為采樣點總數。
2) 將預處理后的時域信號經過DFT,得到頻域信號:
式中r(i)為短時幀信號。
3) 將頻域信號R(i)取模平方后,得到離散的功率譜,再通過Mel 三角帶通濾波器進行濾波。濾波器的傳遞函數為
式 中g(m?1),g(m),g(m+1)分 別 為 第m?1,m,m+1 個濾波器的中心頻率。
4) 第m個濾波器的輸出能量為
5) 離散余弦變換后得到的第n+1 維MFCC 可表示為
式中M為濾波器個數。
6) 為了提取更多特征,還需獲取托輥的動態特性,因此需要對MFCC 進行一階二階差分系數的計算。
式中:dα(p)′為一階差分系數;dα(p)′′為二階差分系數。
1.3 MI?1DCNN
卷積神經網絡(Convolution Neural Network,CNN)是一種多層監督學習前饋神經網絡,主要由輸入層、卷積層、池化層與全連接層構成。1DCNN[18-19]是指在一維數據上進行卷積和池化等操作,1DCNN 在提取特征過程中,卷積層和池化層交替組合,逐步提取信號特征。在網絡結構中,卷積核可直接應用于輸入參數完成特征提取,利用激活函數輸出特征矢量。池化層是對卷積之后的數據進行降維操作,可進一步提取不同范圍的特征,并減小計算量。全連接層通常用于CNN 的末端,將學習到的特征映射到樣本空間,再將輸出數據傳遞到最終的分類器中。
CNN 模型雖然有較強的特征提取能力,但對于同一尺寸的卷積核,只能提取單一特征。為了提取托輥音頻信號不同維度的故障音頻,本文提出了多尺度卷積核的MI?1DCNN 模型[20-21]。該模型由3 個輸入通道和3 層不同尺寸卷積核構成,如圖4 所示。其中不同輸入端的第1 層卷積核的尺寸相同(64×1),同一輸入端的第2 層和第3 層卷積核的尺寸相同,分別為7×1,5×1,2×1;不同輸入端的前面2 層池化層相同且尺寸為3×1,第3 層為2×1。對3 個輸入端網絡中學習到的不同信號特征進行融合,通過全連接層連接,并采用Softmax 函數對托輥的2 類狀態進行識別,輸出結果。

圖4 MI?1DCNN 模型結構Fig. 4 MI-1DCNN model structure
2 試驗驗證
為了驗證本文方法的有效性,針對內蒙古伊金霍洛旗黑岱溝選煤廠實際采集的帶式輸送機托輥音頻信號進行故障識別精度驗證。
2.1 信號降噪和TFM
對托輥音頻信號進行小波閾值降噪處理,采用dB4 小波的無偏風險估計閾值對故障托輥和正常托輥音頻信號進行3 層分解,結果如圖5 所示。可看出通過對故障托輥和正常托輥的音頻信號進行降噪 均去除了一定的高幅值噪聲,提升了信噪比。
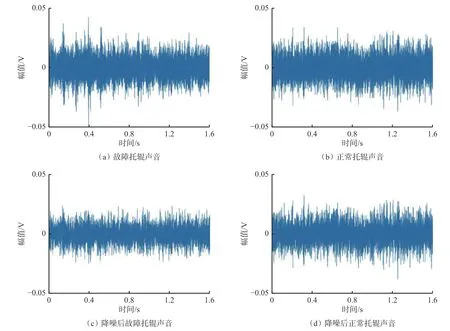
圖5 小波閾值降噪結果Fig. 5 Wavelet threshold denoising results
對降噪后的信號進行MFCC 及其一階二階差分系數提取,結果如圖6 和圖7 所示。可看出故障托輥的MFCC 及其差分系數明顯比正常托輥的高,尤其在MFCC 的高維度處,具有明顯的差異。這是因為故障托輥易產生階次頻率,在高頻處能量占比較高,因此后期使用此特征值進行分類,能取得較好識別效果。
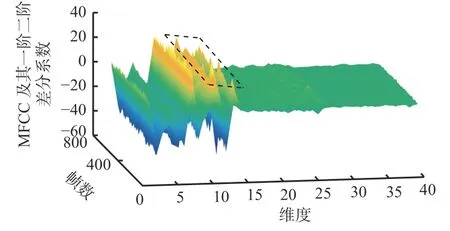
圖6 故障托輥幀數、維度與MFCC 關系Fig. 6 Relationship among frame number,dimension and MFCC of fault idler
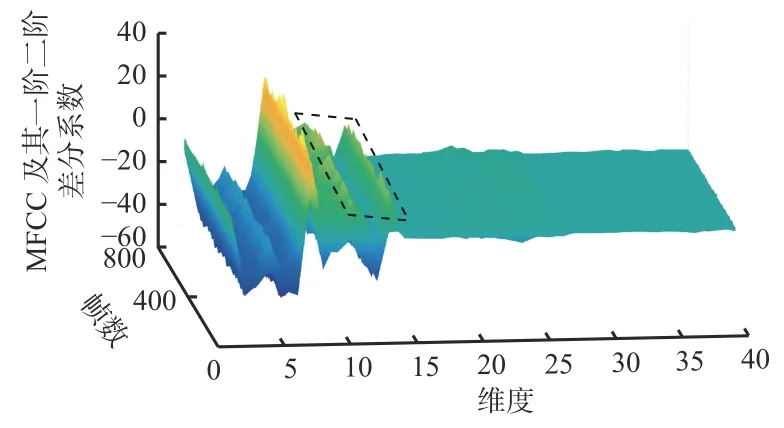
圖7 正常托輥幀數、維度與MFCC 關系Fig. 7 Relationship among frame number,dimension and MFCC of normal idler
對提取的各維度信號進行歸一化處理,將數據投影到[0,1]內,并對數據進行拼接,得到多維度特征TFM,如圖8 所示。可看出故障托輥和正常托輥在頻域維度具有明顯差異。
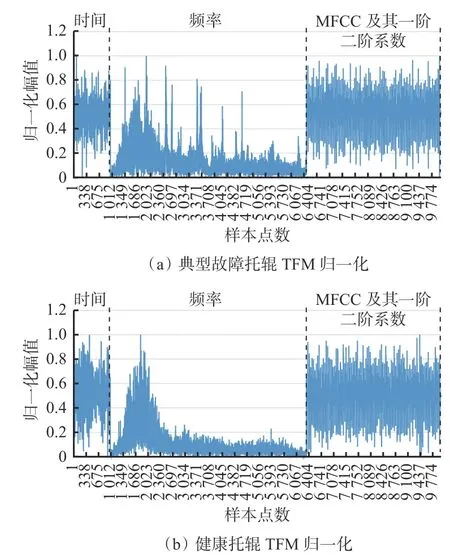
圖8 TFMFig. 8 Time-Frequency-MFCC
2.2 方法對比
故障托輥在工程中想要獲取足夠樣本量十分困難,因此,本文采用重疊采樣的方式對現有故障聲音和正常聲音(各300 組)進行處理,生成3 000 組樣本,2 類信號共計6 000 組樣本;并按照6∶4 的比例得到訓練集和測試集,即3 600 組樣本用于訓練,2 400 組樣本用于測試。
使用相同的托輥音頻信號樣本庫,對改進小波閾值降噪?BP?RBF[8]和MFCC?KNN?SVM[10]進行代碼復現。不同方法的識別結果見表1。可看出采用本文方法對正常托輥和故障托輥的識別準確率均為最高,分別為99.93%和97.38%,平均識別準確率為98.65%,較改進小波閾值降噪?BP?RBF、MFCC?KNN?SVM 方法的平均識別準確率分別提高了1.50%和1.03%,這是由于TFM 能更全面體現托輥故障特征,且MI?1DCNN 具有強大的特征提取能力。

表1 不同方法識別結果Table 1 Identification results of different methods
2.3 應用測試
為了能更好地實現工程化應用,本文對信號的前處理Matlab 代碼轉C++,MI?1DCNN 采用libtorch框架部署在機器人工控機上,在黑岱溝選煤廠進行托輥故障檢測應用測試。測試周期為5 周,巡檢機器人每天穩定巡檢2 趟,巡檢單向里程為4.2 km。拾音器型號為MPA201,機器人本體質量為60 kg,尺寸(長×寬×高)為760 mm×390 mm×1 195 mm,運行速度為0~1.2 m/s,可調速,最大爬坡角度為30°,最小轉彎半徑為10 m,單組托輥識別時長為110 ms,對每組托輥預先進行編號和標定。具體測試流程如圖9 所示。巡檢機器人在輸煤傳送線路上進行音頻信號采集,通過交換機和無線AP 把采集的音頻信號傳輸到上位機系統,再通過上位機所部署好的方法進行托輥故障診斷,并根據編碼器給出的編號,對報警的故障托輥進行定位,之后選煤廠的巡檢工人就可以直接抵達指定故障托輥處,進行故障托輥的復查和更換。
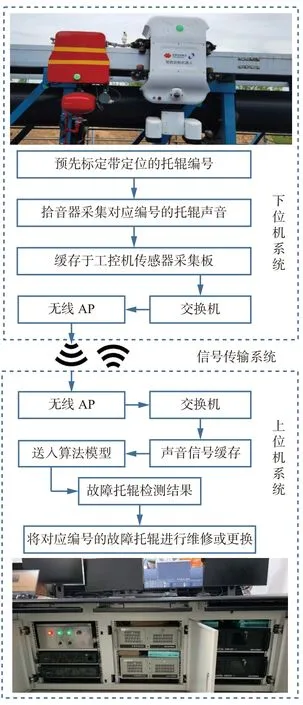
圖9 現場測試流程Fig. 9 Field test process
機器人現場巡檢測試結果見表2。可看出測試時故障托輥識別準確率有時較低,有時能達到100%,這是由于機器人現場巡檢時,存在很多環境噪聲。故障托輥平均識別準確率為98.4%,說明本文方法適用于現場應用。
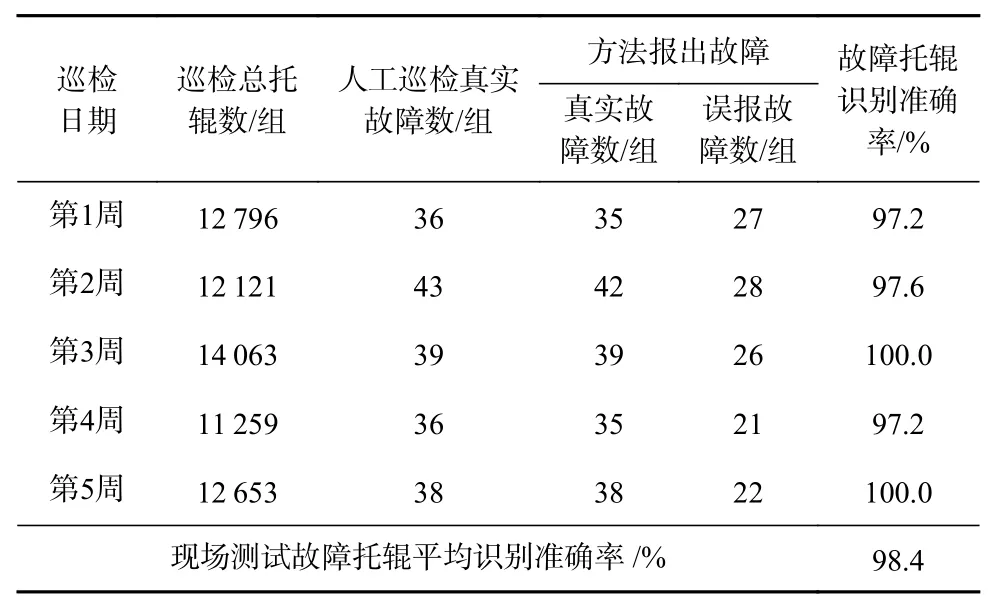
表2 機器人現場巡檢測試結果Table 2 Test results of robot on-site inspection
3 結語
提出了一種基于TFM?MI?1DCNN 的帶式輸送機托輥故障檢測方法,利用巡檢機器人的拾音器采集對應編號托輥的音頻信號,經過預處理得到時域、頻域、MFCC 及其一階二階差分系數的TFM 作為特征參數,采用MI?1DCNN 進行故障托輥檢測。該方法能夠根據預先標定的托輥編號進行復合驗證和維修更換。實驗結果表明,該方法下故障托輥的平均識別準確率為98.65%,較改進小波閾值降噪?BP?RBF、MFCC?KNN?SVM 的平均識別準確率分別提高了1.50%和1.03%。應用測試結果表明,該方法下故障托輥的平均識別準確率為98.4%,說明該方法適用于現場應用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
