球磨機自動加球控制系統設計
2023-04-04 08:12:18姚宇
科技創新與應用 2023年9期
姚 宇
(深圳市中金嶺南有色金屬股份有限公司,廣東 韶關 512325)
目前某礦山大型球磨機仍然采用的是人工分批添加一定量的磨球的方式,這種加球方式使操作人員的勞動強度加大,且加球效率低。因此,采用自動加球控制系統來代替人工加球是必然的選擇。通過研究球磨機的生產工況,球磨機在正常生產運行狀態下,磨礦量不發生大的變動,鋼球的損耗率基本穩定。為了保證球磨機磨球裝載量和不同球徑的球的最佳比例分布,筆者決定改變以往的定期一次性添加適量磨球的辦法,通過自動加球系統實現連續加球,保證球磨機運行在最佳狀態,從而提高磨礦效率。
目前市場上常用的自動加球設備主要采用滾筒式、轉盤式、吸盤式和U 型添加等方式,這些加球方式由于受磨球重力擠壓會導致球爪或者取球機構變形,從而導致卡球、堵球的現象發生。而且由于生產技術的不斷改進,磨球的大小或者材料可能會作出改變,常用自動加球設備無法滿足自適應,針對不同的磨球會出現無法精準抓取的現象。針對上述種種問題,本系統提出了采用先進而且廣泛應用于工業現場的工業機械臂,結合3D 視覺系統定位磨球位置,通過專門設計的針對不同尺寸磨球的海綿真空吸盤來實現精準抓取,所抓取的磨球運送到平臺邊的下料漏斗中,下料漏斗中安裝有紅外傳感器來檢測過球情況,同時達到精確計數的目的。自動加球機控制原理圖如圖1 所示。

圖1 自動加球機控制原理圖
1 硬件結構

圖2 硬件結構圖
1.1 主控部分
本文主控制器采用工業計算機,主控制器主要負責對三維激光掃描儀測量的數據進行處理,將磨球的位置坐標信息轉換為以機械臂為基點的坐標數據,同時計算出最適合抓取的磨球分布模型。等待機械臂準備就緒,主控制器發送指令到運動控制器,運動控制器控制機械臂根據磨球具體坐標位置進行抓球,并將磨球傳送至下料漏斗,安裝于下料漏斗上的紅外傳感器檢測有磨球通過代表一次抓球過程完成,主控制器根據傳感器檢測磨球通過次數記錄加球數,如果在一定時間內紅外傳感器沒有檢測到磨球通過視為抓球失敗,需要重新執行一次抓球過程。
1.2 執行機構
工業機械臂在工業生產中應用廣泛,以其結構簡單、緊湊、操作容易、安全可靠和經濟適用等特點在國內得到普遍推廣。球磨機添加磨球從抓取到傳輸至卸料斗的過程是連續且重復不斷的,因此使用工業機械臂代替人工手動操作是不二之選。本系統中采用四軸機械臂作為執行機構,目的是從球倉中抓取磨球并將磨球輸送到卸料漏斗中,磨球在球倉中呈不規則分布,三維激光掃描儀通過掃描球倉表面來獲取磨球的分布狀態,并獲得表面磨球的三維坐標,通過計算得出最佳抓取的磨球分布個數,機械臂需要從上層依次抓取磨球,抓取完后三維掃描儀進行下一次掃描。本系統中四軸機械臂主要由電控系統、人機交互和伺服驅動等構成。
1.2.1 電控系統
電控系統除了給機械臂各部件提供電源,作為整個機械臂的控制機構,控制著整個機械臂的各項動作執行。電控系統中以運動控制器為控制核心,主要控制機械臂在工作空間的運動位置、姿態和軌跡、操作順序及動作時間等。同時運動控制器還集成有TCP/IP/Modbus-TCP、CAN 和ProfibusDP 等通信接口,方便連接PC、伺服驅動單元、示教器和其他外部控制設備。運動控制器還支持IO 端口擴展,可以通過數字量輸入IO 模塊讀取外部信號狀態,數字量輸出IO 模塊發送控制指令,模擬量輸入模塊讀取各傳感器檢測模擬數值以及通過模擬量輸出模塊傳輸模擬數值給顯示終端。
工業機械臂在運行過程中由于不規范的操作或者設備故障可能會導致機械臂不正常動作,存在極大的安全風險,因此電控系統中必須要設置安全回路。安全回路包括電柜急停、外部急停、示教器急停、安全繼電器、安全繼電器模塊和接觸器等。安全回路采用雙回路冗余設計,且雙回路為高低電平防錯設計,RT6 安全繼電器分別采用一對24 V 和0 V 回路,安全回路中示教器急停、機柜急停、外部急停和安全繼電器串聯連接實現多點聯控。輸出采用軟硬兼顧的雙回路設計,硬件方面安全繼電器輸出控制接觸器的線圈,當接收到急停信號,直接切斷動力源,發出急停指令讓機械臂報錯停止,同時關閉電機抱閘。
1.2.2 人機交互
操作人員可以通過示教器與機械臂完成良好的交互,操作人員通過示教器可以完成機械臂運動指令編程、機械臂零位標定、手動單步執行和遠程控制等功能。示教器相當于一塊可移動的多功能手操器,具有觸摸功能,面板上集成有功能齊全的薄膜面板和雙回路急停開關,均采用薄膜覆蓋,具有良好的防水性能。為了防止誤操作,面板抓手位置還設置三段式手壓開關,手壓開關只有在正確的位置才能允許伺服驅動動作。
示教器界面友好,操作人員能夠很快熟練掌握。操作界面首頁第一欄為狀態欄,可以通過圖標的顏色和明暗度來判斷程序運行狀態、伺服狀態、急停狀態、運行模式、坐標系選擇及通信狀態等。狀態欄下面就是任務欄,操作人員可以選擇查找文件、運行程序、監控畫面和IO 接口設置等任務。任務欄下面是工作區,工作區內有各種功能圖標,通過點擊圖標就可以跳轉到相應功能界面,工作區內可以完成工具坐標系與用戶坐標系的切換,在設置里完成機器人各個參數的設置,包括軸參數、總線協議參數和零點標定參數。
1.2.3 伺服驅動
MRI組MRI檢查損傷總診斷率為89.58%,關節鏡診斷率為91.67%,兩種診斷方式診斷結果無顯著差異(P>0.05),見表1。
機械臂4 個軸是由伺服驅動單元控制伺服電機運動,機械臂一軸、二軸采用1.5 kW 伺服驅動器,三軸為750 W 伺服驅動器,四軸為400 W 伺服驅動器。伺服驅動具有調速范圍寬、定位精度高、傳動剛性好、響應速度快、過載能力強和可靠性高等特點。伺服電機從最低速到最高速加速都能平穩運轉,轉矩波動小,尤其在低速時仍保持平穩而無爬行現象。伺服電機具有較大的過載能力,能夠滿足低速大轉矩的要求,正常情況下過載4~6 倍而不損壞。伺服電機能夠承受頻繁啟動、制動和反轉,具有較小的轉動慣量和較大的堵轉轉矩,較小的時間常數和啟動電壓能夠滿足快速響應的要求。
1.3 視覺系統
本系統中采用三維激光掃描儀作為視覺檢測機構,三維激光掃描儀主要由激光發射器、接收器、時間計數器和馬達控制可旋轉的濾光鏡、控制電路板、微電腦、CCD 機及軟件等組成。三維激光掃描儀突破了傳統單點測量方法的局限,具有高效率、高精度的獨特優勢。三維激光掃描儀可快速測得物體的輪廓集合數據,能夠提供掃描物體表面的三維點云數據,并加以建構、編輯和修改,生成通用輸出格式的曲面數字化模型。
1.4 抓取裝置
要從球倉中將磨球抓取并運送到球磨機卸料斗中,必須要選用一套能夠穩穩抓住磨球的裝置。電磁吸盤在磨球抓取領域中應用廣泛,但電磁吸盤只針對鋼球有效,目前球磨機磨球除了鋼球外還有非金屬球的氧化鋁球、氧化鋯球和陶瓷球,使用電磁吸盤具有一定的局限性。本系統中選用海綿真空吸盤來作為抓球裝置,海綿真空吸盤屬于真空吸盤的一種,相較于普通真空吸盤,其功能更強大,主要是由海綿(密封件)、真空發生器、儲能器、獨立閥體和氣管接口組成。真空吸盤上的海綿并不是普通的海綿,而是一種EPDM 橡膠發泡海綿,這種海綿具有耐高溫、柔軟及回彈性能好等特點,作為海綿真空吸盤的密封材料。吸盤底部是由無數個小孔組成的,每一個小孔都充當吸盤的作用,在吸附非平面的物體時具有一定的優勢。當海綿真空吸盤接觸物體表面時這些小孔會自動感應到是否接觸到物體,而那些沒有接觸到物體的小孔會自動關閉閥門,這就讓整套海綿真空吸盤具有很好的密封性。
工藝現場磨球尺寸有3 種規格,分別是Φ120 mm、Φ100 mm、Φ60 mm。為了讓海綿真空吸盤能夠精準抓取磨球,吸盤設計尺寸要合理,接觸面太大容易吸附旁邊的鋼球,太小則吸力不夠無法抓取磨球,因此吸盤尺寸要略小于磨球直徑,吸盤表面要設計成凹面以能夠與磨球表面更貼合。針對3 種磨球尺寸設計3 種尺寸的海綿真空吸盤,3 個吸盤安裝于機械臂末端旋轉軸上,可以通過指令切換吸盤。
2 程序設計
2.1 主程序
主程序負責完成與視覺系統的數據通信和協調調用其他子程序,主程序循環掃描執行。程序執行前先初始化串口、定時器和計數器,開始執行掃描程序并讀取視覺系統傳輸的數據,然后將視覺系統坐標數據轉換為機械臂坐標數據,并分析計算出最適合抓取的磨球坐標數據。接下來執行抓球子程序,機械臂運動至要抓取的磨球上方,海綿真空吸盤動作抓住磨球,機械臂繼續運行至下料漏斗上方,海綿真空吸盤釋放磨球,漏斗壁上的紅外傳感器檢測到磨球落下就代表完成一次抓球過程。當機械臂抓完本次掃描到的磨球后才繼續下一次的掃描動作(如圖3 所示)。
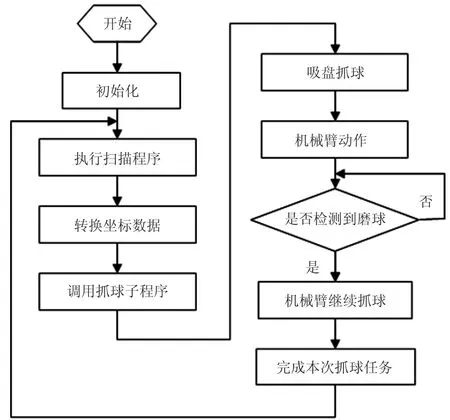
圖3 主程序流程圖
2.2 坐標轉換
機械臂要精確抓取磨球就必須要有磨球的坐標參數,機械臂末端的三維激光掃描儀獲取的磨球的坐標信息是基于掃描儀坐標系的,并不能直接使用。那么,要得到磨球在機械臂坐標系下的正確坐標位置信息,系統必須對掃描儀坐標下的位置與機器人坐標下的位置進行標定,這個過程就是手眼標定。本系統中使用Tsai-Lenz 算法進行手眼標定,標定過程需要采用標定板,我們需要得到機械臂坐標系到基礎坐標系的轉換關系baseHtool、掃描儀坐標系到機械臂坐標系的轉換關系toolHcam 和掃描儀坐標系到標定板坐標系的轉換關系calHcam,最終求得標定板坐標系到基礎坐標系轉換關系。
2.3 抓球程序
主控制器接收到視覺系統傳輸的磨球數據并進行數據運算處理、格式轉換和篩選后,得到一定數量的磨球坐標,主控制器給這些磨球坐標隨機編號,然后主控制器依編號發送抓球命令和給機械臂控制系統,機械臂控制系統控制伺服驅動器執行抓球命令。機械臂將末端移動到等待抓取的磨球正上方坐標處,海綿真空吸盤動作抓住磨球,機械臂接著將末端移動到下料漏斗正上方坐標處,海綿真空吸盤釋放磨球,磨球落入下料漏斗,紅外傳感器檢測到磨球通過,發送信號給主控制器代表完成一次抓球動作,機械臂繼續抓取下一編號磨球。機械臂抓球過程中,如果磨球因為外力或者其他原因脫落,導致傳感器沒有檢測到磨球,則視為本次抓球過程失敗,機械臂返回重新抓取下一個磨球。
3 運行調試
球磨機的磨球添加是從入料端加入的,加球機的安裝應該盡量靠近入料口,要考慮土建結構的承重,并保證加球機參數的精確,機械臂安裝底座需要與球倉底座在同一水平面。設備安裝完成就可以上電運行調試了,調試之前需要對機械臂的參數進行設置。示教器進入設置菜單配置文件中設置球倉長、寬、高的參數和虛擬手爪數量,為了機械臂能夠更快速、準確地抓取目標,還需要設置抓取路徑和釋放路徑。示教器置于手動狀態下抓取路徑以機械臂原點為準備點,示教器手動移動機械臂至球倉中央略高于球倉的位置作為抓取路徑的進入點和后撤點,示教器移動至下料漏斗正上方10 cm 作為釋放路徑的進入點和后撤點,在參數配置中記錄這些點的坐標位置。參數設置完畢就可以將示教器置于自動狀態,待球倉裝滿磨球后就可以開始自動加球,加球過程中逐步優化控制程序和控制參數,直到系統穩定運行。
4 結束語
本系統可以針對不同尺寸、不同材質的磨球進行添加,而且可以給多臺球磨機同時加球,實現了磨球添加的精確計量,更有利于改善球磨機磨礦效率。本系統通過改變以往的人工手動加球方式,實現機械化自動加球,提高了磨球添加效率,減輕了操作人員的勞動強度,具有一定的經濟效益和社會效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45