轉移概率部分未知下Markov跳變系統的滑模控制
2023-04-29 00:44:03李媛譚旭峰董知非于忠鑫
沈陽工業大學學報 2023年2期
李媛 譚旭峰 董知非 于忠鑫

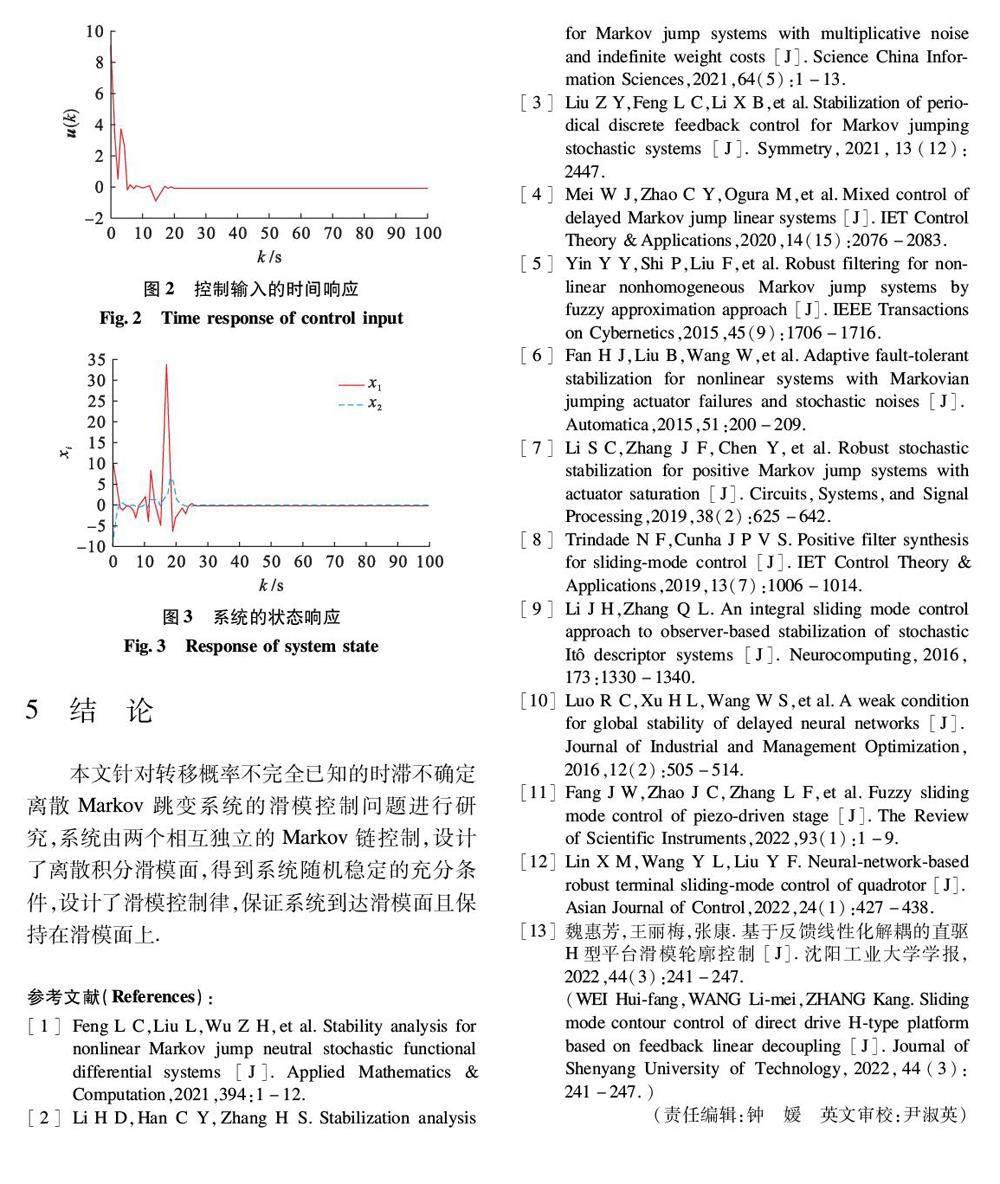

摘 要:針對系統中含有兩個相互獨立的Markov鏈,且轉移概率不完全已知的時滯不確定離散Markov跳變系統的滑模控制(SMC)問題,通過考慮參數不確定性的匹配條件,設計離散積分型滑模面.利用時滯分割技術構造含加權參數的LyapunovKrasovskii函數,得到系統隨機穩定的充分條件,根據指數趨近律的到達條件設計滑模控制律,使得系統的狀態軌跡能夠到達所設計的滑模面.數值仿真結果表明,該方法具有一定的有效性.
關 鍵 詞:Markov跳變系統;隨機穩定;時變時滯;轉移概率;時滯分割法;滑模控制;LyapunovKrasovskii函數;積分型滑模面
中圖分類號:TP273 文獻標志碼:A 文章編號:1000-1646(2023)02-0214-07
隨著工業生產的快速發展,現代控制領域的大量動態系統都呈現出復雜化和大型化的特點.任何實際系統中都可能存在隨機不確定性因素,例如環境噪聲、組件故障、隨機損耗、參數的不確定性以及系統輸入或輸出存在的隨機誤差等.如果隨機系統的統計特性是具有無后效性的,可以描述為Markov跳變系統(MJSs).大多化學過程、經濟系統、制造系統、運輸系統和網絡控制系統等都存在Markov跳變現象,也是近年來控制領域研究的熱點.針對Markov跳變系統,在穩定性和鎮定性[1-3]、H∞控制[4]和濾波設計[5]等方面取得了大量成果.目前,大多關于MJSs的研究是基于一種模態,且轉移概率是完全已知的,但在某些實際系統中的突變可能由兩個或多個相互獨立的Markov過程控制,且轉移概率的全部信息可能難以得到或者獲取代價很高.例如,在網絡控制系統中,控制器執行器延遲和傳感器控制器延遲通常是兩個獨立的Markov鏈.高超聲速飛行器的控制系統有多個執行器,當受到電磁波干擾時,控制回路部分有效或者無效是隨機的,每個執行器在任何采樣時間都可能發生故障,所以不同執行器的故障由不同的Markov鏈描述[6-7].因此,研究具有兩個Markov鏈的Markov跳變系統且轉移概率不完全已知的情況是很有必要的.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50