智能優化技術在艦船電力系統諧波抑制中的應用
2023-05-05 00:53:18劉偉
艦船科學技術 2023年6期
劉 偉
(沈陽城市建設學院 信息與控制工程學院,遼寧 沈陽 110167)
0 引 言
諧波的出現,會降低艦船電力系統電能生產、傳輸以及應用效率[1-3]。當艦船電力系統出現諧波,電氣設備會出現異常升溫、振動等問題,此時絕緣老化率提升,可用時間也會逐漸變少。除此之外,還會導致艦船電力系統的繼電保護與自動裝置出現誤動,從而導致電力系統的穩定性受到負面影響。
目前艦船電力系統中核心應用為大功率變流裝置,此類裝置的使用會導致電力系統出現大量諧波電流,如果這些諧波不能被有效抑制,便會導致艦船電氣設備運行狀態受到威脅。所以,艦船電力系統諧波抑制方法,是艦船電力系統研究的一項核心內容。
分析已有研究資料可知,周祎隆等[4]使用并聯有源濾波器,抑制艦船電力設備所用的大功率變頻設備諧波,但此類裝置的參數設定具有固定性,不具有自適應調整能力,在艦船運行時,電力設備出現的諧波問題,會存在隨機性和無規律性,此類裝置的應用效果還需優化。齊坤等[5]在抑制艦船電力系統諧波問題時,使用下垂控制方。此方法雖然能夠以功率合理分配的方式,保證艦船電力系統正常運行,從而避免出現諧波問題,但屬于間接抑波方式,缺乏直接性,不具備針對性的電力系統諧波抑制能力。
結合前人研究成果和存在的不足,本文提出基于智能優化技術的艦船電力系統諧波抑制方法。此方法在解決諧波抑制問題時,將模糊PID 控制器和智能優化算法相結合,根據已知諧波分量,調節電力系統電流,完成諧波的智能優化抑制。
1 艦船電力系統諧波抑制
1.1 基于p-q 檢測的艦船電力系統諧波檢測方法
設置艦船電力系統的三相電壓(uA,uB,uC)、電流()依次為:
式中:Un,In分別為各次諧波電壓、電流有效值;?,t分別為角頻率與時間變量;?為電壓相角的瞬時值。
獲取有功功率q和無功功率p,q和p屬于瞬時變量,則
式(4)的有功功率q、無功功率p均存在基波電流分量、諧波分量,此時三相基波電流分量iAg,iBg,iCg為:
每相電流里諧波分量iAx,iBx,iCx,即為線路各相電流和基波分量之間的差值,則艦船電力系統諧波總值是iO=iAx+iBx+iCx。
1.2 基于模糊PID 智能優化的諧波抑制方法
1.2.1 用于抑制諧波的模糊PID 控制器設計
圖1 為基于模糊PID 智能優化的諧波抑制方法中,用于抑制諧波的模糊PID 控制器結構示意圖。

圖1 模糊PID 控制器結構示意圖Fig.1 Structure diagram of fuzzy PID controller
圖中,KP(比例系數)、KI(積分系數)、KD(微分系數)和i′與iO之間的關聯性為:
調整KP,KI,KD大小,保證模糊PID 控制器的輸出滿足期望,便可調節艦船電力系統的電流諧波,完成諧波抑制,所以KP,KI,KD大小的合理設置,直接影響控制器對諧波的抑制效果。
1.2.2 基于改進遺傳算法的控制器智能優化方法
改進遺傳算法使用時,會將可行解集合比喻為種群,各個可行解即為種群里的多個個體,個體基因是可行解的詳細信息。在本文研究中,個體基因是控制器智能優化時,KP,KI,KD的具體數值。使用改進遺傳算法對模糊PID 控制器參數進行智能優化時,要結合KP,KI,KD的特點,以特殊的編碼模式,把控制參數編碼為個體基因,再引入改進遺傳算法,將個體執行迭代尋優,迭代停止后,便輸出種群里適應度最大的個體,把此個體基因執行解碼,便可獲取KP,KI,KD的最佳組合。圖2 為控制器智能優化流程。
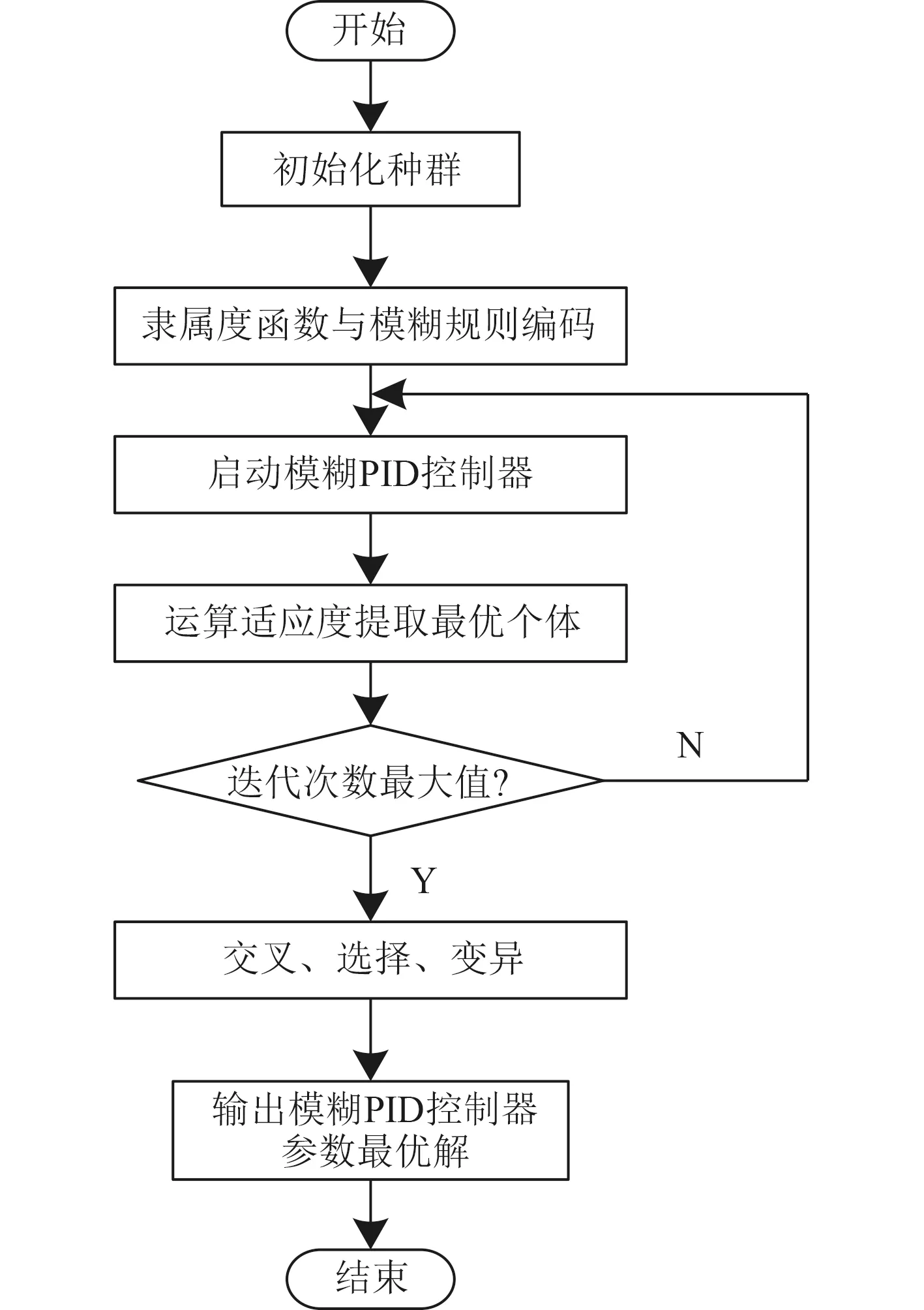
圖2 控制器智能優化流程Fig.2 Intelligent optimization process of controller
圖2 中的核心操作內容如下:
1)初始化種群。遺傳處理前必須設定初始種群,引入隨機模式構建初始種群,種群基因變化范圍設為1~5。
2)編碼和解碼。實數編碼操作難度小,所以引入此編碼模式,將模糊PID 控制器的控制參數編碼為個體基因。
3)適應度函數設置。將模糊PID 控制器對諧波抑制的理想值 ?i、諧波值iO之間偏差的絕對值的積分I?,作為適應度函數的計算參量。適應度函數值較高,則模糊PID 控制器的質量較好,此時諧波抑制后電流畸變值為最小值,改進遺傳算法尋優目的即為適應度最大值,則
4)交叉、選擇、變異處理。交叉處理主要結合自適應交叉概率、目前迭代過程中種群適應度值均值Gavr、最大值Gmax,自適應調節交叉概率。設置交叉概率后,根據交叉概率在種群里篩選個體(控制參數可行解)執行交叉處理,應用算術交叉算法執行交叉計算,若將交叉后個體的第j個基因執行變異。
2 仿真實驗
2.1 實驗環境設計
艦船電力系統中,使用4 臺分布式電源,功率因數為0.98,此電力系統屬于艦船電力推進系統,其結構主要分為主推進器、側推進器,具體結構簡圖如圖3 所示。電力推進系統屬于獨立性的電力系統,因為發電容量存在有限性,且遭到非線性負荷的負面影響,便會出現大量諧波電流,影響艦船電力推進系統正常運行。
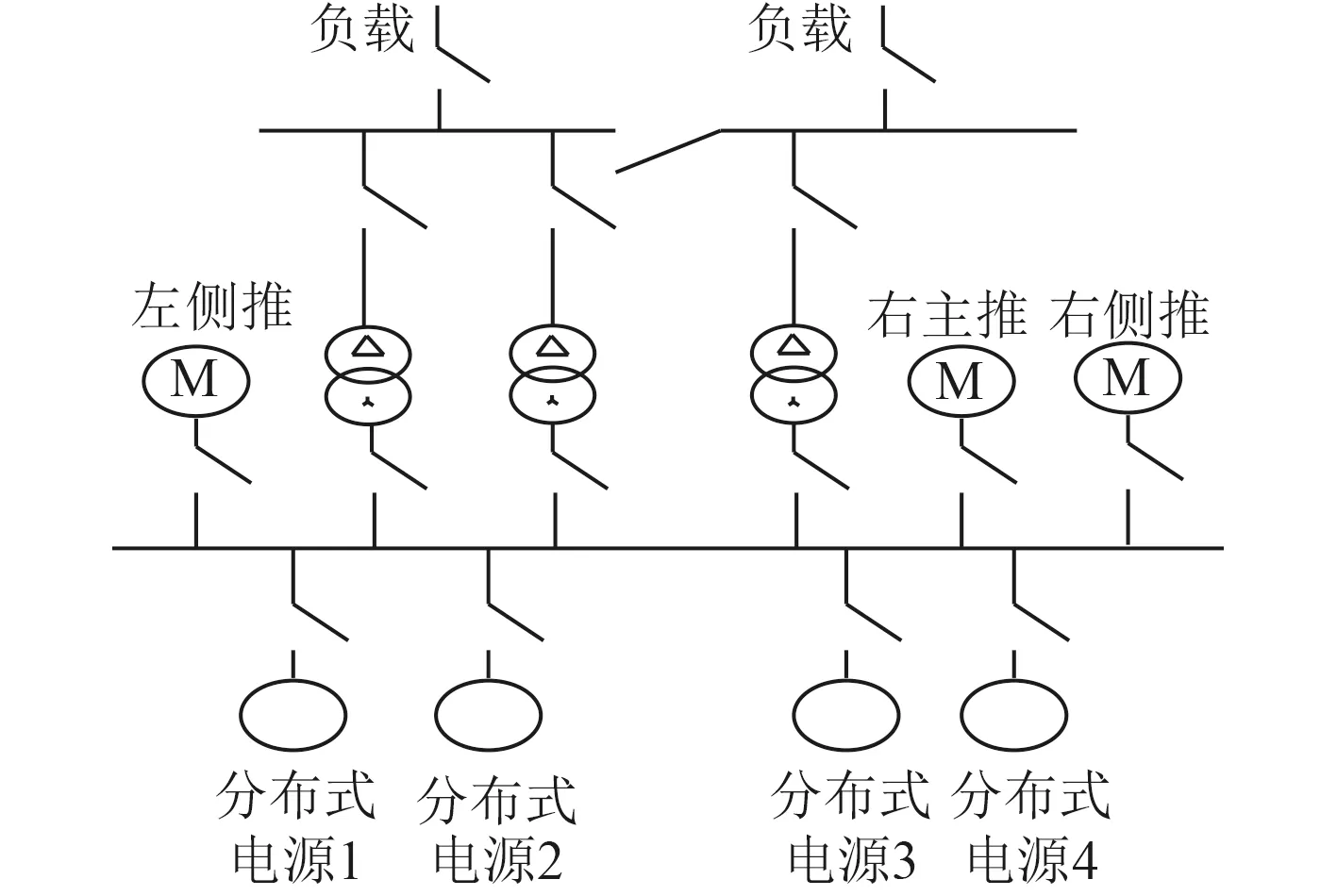
圖3 艦船電力系統簡圖Fig.3 Ship power system diagram
2.2 諧波抑制效果測試
本文方法對圖3 的電力系統諧波檢測結果如圖4所示。艦船電力系統諧波污染下,電力系統電流存在明顯畸變,若不進行有效抑制,便會導致電力系統的推進進程出現斷續情況。
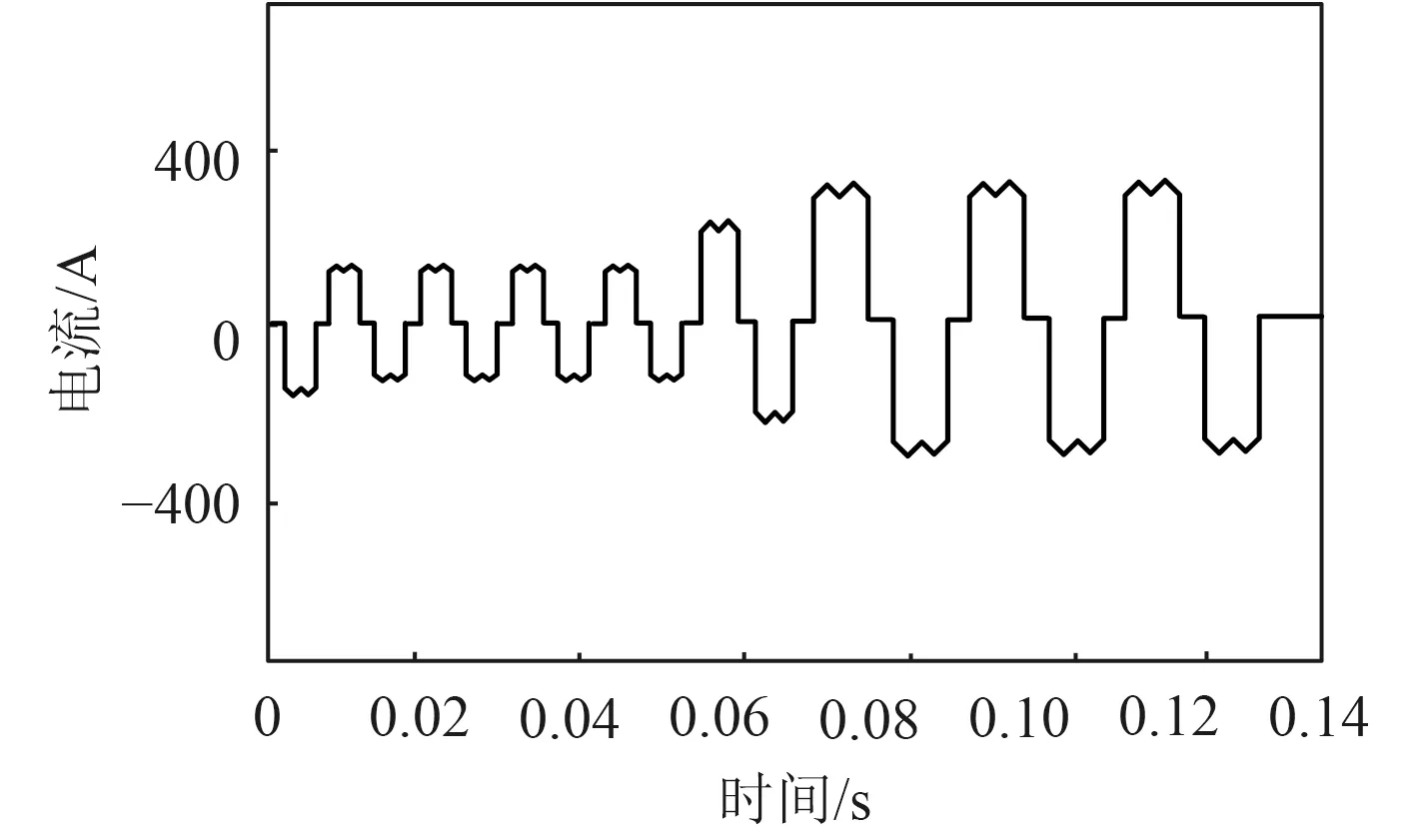
圖4 艦船電力系統諧波檢測結果Fig.4 Harmonic detection results of ship power system
本文方法對圖4 的諧波執行抑制,抑制后的電力系統電流變化如圖5 所示。對比圖4 和圖5 可明顯看出,本文方法對艦船電力系統諧波抑制后,電流畸變情況明顯改變,電流污染得到有效解決。證明本文方法可用于艦船電力系統諧波抑制問題中,具備諧波抑制能力。
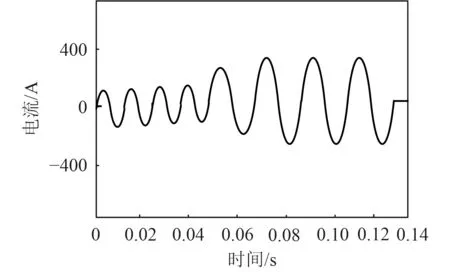
圖5 諧波抑制后電力系統電流變化Fig.5 Power system current change after harmonic suppression
為深入分析本文方法所用的智能優化技術,對諧波抑制的必要性,分析本文方法使用改進遺傳算法前后,模糊PID 控制器的使用效果。實驗中,在0.08 s時施加畸變電流,則測試結果如圖6 所示。分析可知,當0.08 s 時施加畸變電流后,模糊PID 控制器優化前,在0.10 s 時才完成諧波抑制;而模糊PID 控制器經改進遺傳算法優化后,在0.085 s 便可完成諧波抑制,由此證明,本文方法使用改進遺傳算法,對模糊PID 控制器執行參數優化設置,存在必要性。
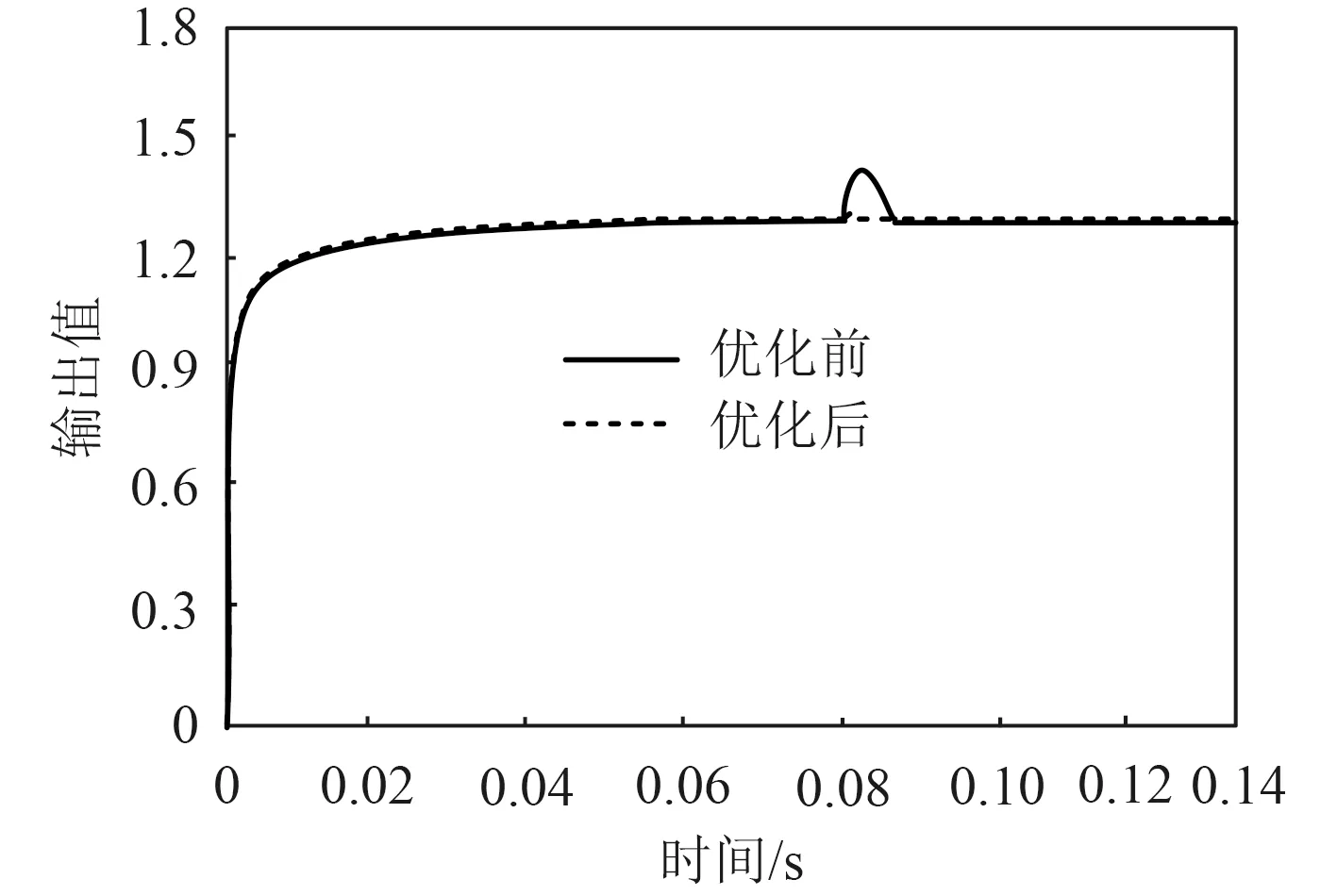
圖6 模糊PID 控制器優化前后單位階躍響應變化Fig.6 Change of unit step response before and after optimization of fuzzy PID controller
3 結 語
針對艦船電力系統出現的諧波污染問題,本文提出基于智能優化技術的諧波抑制方法。此方法的創新之處在于應用改進遺傳算法,優化設置模糊PID 控制器的控制參數,實現電力系統諧波電流的自適應補償抑制。經過實驗驗證,本文方法對艦船電力系統的諧波抑制效果,能夠滿足艦船電力系統諧波管理標準。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34