基于方格網狀等離子體激勵器的翼型湍流減阻實驗
2023-05-06 09:45:58方子淇宗豪華付正陽干宗耀曹亞威
空軍工程大學學報 2023年2期
方子淇, 宗豪華, 蘇 志, 付正陽, 干宗耀, 曹亞威
(1.西安交通大學航天航空學院,西安,710049;2.西安交通大學機械工程學院,西安,710049;3.空軍工程大學航空工程學院,西安,710038)
隨著科技發展,飛機飛行速度越來越快,航程也越來越遠。飛機飛行阻力與其飛行速度成正比,速度越快的飛機所受到的阻力越大,因此增大了對能源的消耗。研究表明,若一架波音737民航客機減小1%的阻力,每年即可節約15 000加侖的航空燃油消耗[1]。大型運輸機和大展弦比無人機在巡航飛行階段,摩擦阻力占總阻力的比重也超過50%。因此,降低摩擦阻力尤其是湍流摩擦阻力可以提高飛機的巡航升阻比,進而降低發動機油耗、提高飛機航程和航時、節約能源消耗,助力“碳達峰”“碳中和”目標的實現,具有重要意義。
邊界層流動減阻控制技術主要分為被動控制和主動控制兩種方式。典型流動控制手段有小肋[2]、溝槽[3]、微吹氣陣列和等離子體氣動激勵等。等離子體氣動激勵作為一種新型主動流動控制技術,與另外幾種方式相比,具有結構簡單、響應迅速、頻帶寬等優點,因而成為當前的研究熱點[4-5]。
Malik等人最先使用直流電暈放電對平板邊界層進行操縱,并于30 m/s的來流風速下實現20%的減阻,并指出進行多次放電來獲得更高的效率是有必要[6]。而介質阻擋放電(dielectric barrier discharge, DBD)等離子體激勵器很好的迎合了這項要求。近些年也有許多團隊做了有關等離子體激勵在湍流減阻方面的工作。例如:英國諾丁漢大學Choi等人設計了兩組相對的不對稱等離子體激勵器,在來流速度為1.8 m/s的條件下,通過交替的極性脈沖信號激活激勵器上的高壓電極,使得等離子體誘導的氣體產生交替的運動,從而在近壁面處產生振蕩,削弱近壁事件,使湍流邊界層的摩擦阻力最大可降低45%[7-8]。美國圣母大學Corke團隊發現減阻效果很大程度上取決于高壓電極之間的間距,即更密集的電極布置可以產生更好的減阻效果,由此超密間距陣列式的等離子體激勵器是值得研究的[9]。西北工業大學WU B等人將雙向DBD等離子體激勵器沿展向布置于平板上,施加正弦交流電信號,分別產生與流向相同和相反的等離子體射流,結果向后產生射流的減阻效果略優于向前,在來流為14.1 m/s的條件下可達8.78%[10]。后其團隊最新發表的成果研究了不同激勵頻率下展向射流對湍流邊界層的減阻控制效果,在來流為10.7 m/s的風速下,得到局部減阻率隨著頻率的增加而先增大后減小的趨勢,最大可達7.4%,表明激勵頻率對湍流邊界層減阻效果有重要影響[11]。
盡管許多研究都取得了很好的結果,但其中大部分是在平板湍流邊界層中以小于15 m/s 的來流速度下進行的。想要進一步提升湍流減阻效果,必須擺脫傳統展向或流向等離子體射流的思維范式,另謀新路。利用微吹氣對湍流邊界層進行減阻是由美國NASA的Hwang等首次提出的[12],通過壁面上的微小氣孔噴出少量氣體來實現減阻,能夠以極小的吹氣速度與流量在較高來流速度下實現的有效減阻,局部摩擦減阻率可達50%~70%[13],其通過減小局部流向速度,進而實現減阻。除在平板湍流邊界層中的應用外,日本慶應義塾大學ETO K等將微吹氣方法應用到Clark-Y翼型上,在58 m/s的來流速度下實現了20%~40%的局部摩擦減阻,但翼型總阻力略有增加,且存在供氣系統復雜供氣系統復雜、多孔介質難以維護等問題[14]。同時,為了推動在航空工程中的實際應用,需要在翼型案例中驗證壓力梯度對等離子激勵器在減阻方面的影響。LI Y Q等在NACA0012翼型表面上布置雙側對沖式激勵器,并在Ma=0.3~0.5范圍內進行流動控制[15],這是等離子體湍流減阻方法在翼型上的首次嘗試,但遺憾的是并未取得減阻效果。
受以上研究工作啟發,本研究設計了一種新型方格網狀等離子體激勵器,其初衷在于通過創造一個個由網格四周向中心對沖的等離子體壁面法向射流,來模擬壁面微吹氣陣列的作用效果。本文的組織架構如下:首先,研究了激勵器的電特性,并通過高速粒子圖像測速儀(particle image velocimetry, PIV)對誘導流場特性進行診斷。在此基礎上,將激勵器布置在零度攻角的NACA0012 翼型上,使用尾耙測量來獲得減阻幅度隨激勵強度的基本趨勢。最后,對減阻機理進行簡要分析,得出本文的結論。
1 實驗裝置
1.1 方格網狀激勵器與電源
本文設計的一種新型方格網狀激勵器,其誘導產生的近壁射流可實現類似微吹氣的效果。如圖1所示,激勵器總寬度為100 mm,總長度為300 mm,高壓電極寬度d=1 mm,低壓電極寬度分別為L1=5 mm和L2=10 mm,與厚度為180 μm的聚酰亞胺介質層組成不同間距和不同個數的方格網狀5×5構型與方格網狀10×10構型。

圖1 方格網狀激勵器及實驗模型示意圖
電源采用CTP-2000K毫秒脈沖等離子體電源,輸出波形為AC正弦波,輸出電壓0到30 kV連續可調,占空比1%到99%可調,脈沖頻率10到1 kHz連續可調,并將其放電頻率設置為6.6 kHz。
1.2 風洞和翼型
實驗采用空軍工程大學低速回流風洞進行實驗測量。該風洞為一座閉口回流式風洞,實驗段長3 m、寬1.2 m、高1 m。其主要部件分為動力段、擴壓段和過渡段、拐角和導流片、穩定段、收縮段和實驗段。動力段采用YTP355M1-6變頻調速電機,其功率為160 kW,轉速最高可達到986 r/min,在實驗段產生來流速度(u∞)5~75 m/s可調,在實驗來流速度范圍內,實驗段主流區湍流度 ≤ 0.2%。
如圖1所示,將等離子體激勵器沿流向布置于材料為光敏樹脂的NACA0012翼型上,翼型弦長c=400 mm,展長l=440 mm。為了著眼于湍流減阻,在距機翼前緣2 cm處布置寬度為1 cm、由30目砂紙制成的直條形轉捩帶,強制進行轉捩。翼型沿流向垂直布置于平板模型中部,平板模型水平安裝至風洞實驗段中間高度處,其上表面距離風洞上壁面0.46 m離風洞下壁面0.5 m。
1.3 測量系統
1.3.1 激勵特性測量系統
方格網狀激勵器激勵后的放電電壓與電流分別通過高壓探頭(Tektronix, P6015A)和電流探頭(Tektronix, P6022)配合示波器(Tektronix, MDO3014)進行采集與記錄。
高速PIV測量系統由高速相機(Phantom-V2512,1280×800像素),高頻率激光器(TABOR-D30)和可編程定時單元(LaVision,PTU9)組成。PIV采集和放電之間的時間精確同步由數字延遲脈沖發生器(DG645)實現,其輸出兩路信號:一路用于調節電源產生的非穩態正弦電壓波形;另一路向PIV發送觸發信號。示蹤粒子由帶 Laskin 噴嘴的霧化器產生,典型粒徑約為1~2 μm。測量平面選定為圖1所示的xOz平面,對于方格網狀5×5構型,視場范圍為36.04 mm ×22.56 mm,分辨率為35.46 pixel/mm。對于方格網狀10×10構型,視場范圍為52.53 mm×32.9 mm,分辨率為24.41 pixel/mm。每個測試案例,由Davis10.2 采集到 1 500 對圖像,并將對應的瞬時速度取平均以獲得平均射流速度場。
1.3.2 尾跡測量系統
當翼型處于零度攻角狀態時,其表面不會發生流動分離現象,因此總翼型阻力主要由摩擦阻力決定,湍流摩擦減阻可直接表現為總的減阻量,并可以通過尾耙進行診斷。如圖1所示,尾耙放置于翼型后緣下游的一個弦長處,在大約100 mm的翼展范圍內測量尾流速度。直徑為1 mm的總壓探頭以6 mm的間距排列,每個探頭連接一個差壓傳感器(HSTL-FYDX01,量程1 kPa,測量精度0.1%)。傳感器的輸出電壓由數據采集卡(NI USB 6211)讀取,后發送到 Labview 程序以計算總阻力系數(Cd)[16]:

(1)
(2)
式中:Fd為翼型總阻力;ρ= 1.226 kg/m3為空氣密度;u∞為來流速度;u(y)為尾跡速度;y1與y2分別為尾跡的上下邊界。根據測量誤差傳播規律,在來流速度為 20 m/s 時,由壓力測量不確定性引起的尾流速度相對測量誤差估計為 0.54%。
2 實驗結果
2.1 電特性
放電電壓峰峰值Up-p=4 kV、脈沖頻率f=100 Hz、占空比50%時調制處理后的電壓電流波形如圖2所示。圖中可見許多于放電過程中由微放電產生的電流尖峰,與文獻[17]結果一致。實驗中采用的放電參數如表1所示。

圖2 調制處理電壓電流波形

表1 實驗中的放電參數
2.2 發光特性
不同放電電壓下方格網狀10×10構型的放電效果如圖3所示。圖像于1/13 s的曝光時間下拍攝,由于單組激勵器電極尺度較小,微放電的電流細絲難以觀察。電壓較小時(Up-p= 6 kV),等離子體延伸長度約為1.85 mm,并且放電亮度較暗;隨著電壓的增大(Up-p= 7 kV),放電面積稍有增加,在放電區域內出現較為明顯的小亮條;當電壓到Up-p= 8 kV時,放電面積進一步增大,放電亮度較亮,小亮條相比之前更為明顯,與其他放電區域形成鮮明的對比,放電同時有高頻的空氣擊穿聲。分析可知,放電區域和亮度是放電強度(激勵強度)的體現,故Up-p越大,等離子體激勵強度越大。
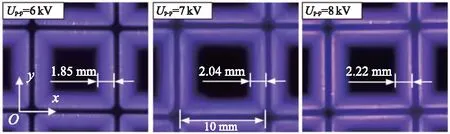
圖3 不同電壓下放電發光特性
2.3 誘導流場特性
2.3.1 脈沖頻率的影響
為探究脈沖頻率對方格網狀激勵器誘導流場特性的影響,通過對放電電壓波形進行調制處理,保持Up-p=8 kV,占空比50%,得到不同脈沖頻率下放電誘導速度場演化如圖4所示,根據不同脈沖頻率的放電時間,將一個放電周期(1/f)劃分為4個相位(φ=0.25π,0.5π,0.75π,π)。
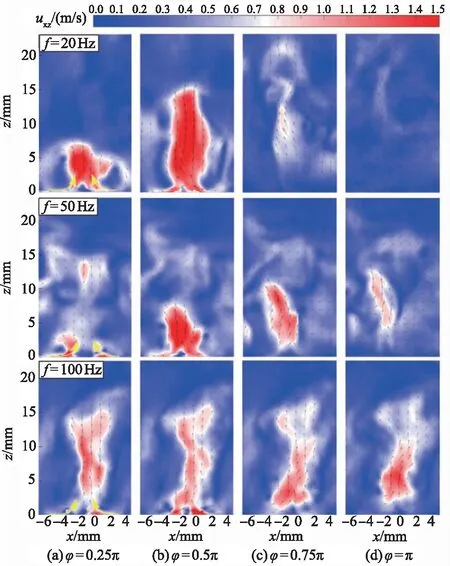
圖4 不同脈沖頻率下的速度場演化(Up-p = 8 kV,占空比50%)
f=20 Hz時,從圖中可以更好地觀察到射流產生的過程,φ=0.25π時低壓電極左右兩側各自產生了沿x和-x方向的沿面射流,由于啟動渦的存在,射流頭部向上彎曲,二者在中間x=0 mm處碰撞;隨后φ=0.5π時,二者相互融合產生法向射流,瞬時最高速度為2.84 m/s,射流覆蓋范圍延伸長度約為15 mm;在該頻率下,激勵形成的射流具有整體結構明顯、流場結構消散快等特點。
當f=50 Hz時,放電誘導的射流和啟動渦的演化過程與f=20 Hz時基本相同。但由于此時激勵時間變短,射流傳播時間縮短,射流覆蓋范圍顯著減小,φ=π時射流僅能延伸至z=10 mm。但在φ=0.25π時,射流最高速度為3.02 m/s,同時可以觀察到兩沿面射流還未融合前的形態。該頻率下,激勵形成的射流具有結構較小、流場結構消散較慢等特點。
當f增大至100 Hz時,激勵器在極短時間內為流場注入能量,射流最高速度為2.23 m/s。整體流場演化出較為明顯的結構,由于此時射流發展時間極短,射流消散的速度較低頻情況更慢,同時由于頻率的增大,在下一次射流發展開始前,用于射流耗散的時間也更短。因此,各個周期誘導的合成射流均近似持續存在,此時的放電誘導流動結構類似于未對電壓進行調制處理的結果。
綜上所述,在當前狀態下,整體誘導射流結構隨著脈沖頻率的增大趨于穩定,且射流消散速度變慢,但誘導射流最大速度并非隨著脈沖頻率單調增大。
2.3.2 占空比的影響
通過對放電電壓波形進行調制處理,保持Up-p=8 kV,f=100 Hz,對不同占空比下發展穩定后的平均流場進行研究,如圖5所示。可見,隨著占空比的增大,激勵作用的時間越長,誘導產生的射流強度越高,從0.57 m/s(占空比10%)增大到1.01 m/s(占空比30%)再到1.02 m/s(占空比50%)最終達到1.1 m/s(占空比70%)。

圖5 不同占空比下平均誘導速度場(Up-p = 8 kV,f=100 Hz)
2.3.3 間距的影響
對于方格網狀5×5構型和方格網狀10×10構型中的單個方格激勵器來說,不同點就是低壓電極的長度,故改變構型可近似作為改變間距。將Up-p均調整為 6 kV,不對電壓波形做調制處理,結果如圖6所示。可以看到,同樣電參數下間距大的沒有間距小的誘導流場強度高,10×10構型最大0.6 m/s,5×5構型最大0.94 m/s,但前者的產生射流延伸范圍更廣。造成這種射流覆蓋范圍和速度差異的原因推測如下:對于小間距激勵器,每個網格內部相對高壓電極所誘導的體積力在流向范圍上存在重疊部分,促使射流速度得以加快;增大間距后,射流對沖效應減弱、垂直方向速度降低,但射流可以充分發展和延伸,因此覆蓋范圍更大。相比之下,在提高誘導射流速度上,小間距構型顯得更有潛力。

圖6 不同間距下平均誘導速度場(Up-p = 6 kV)
此外,需要說明的是,由于等離子體激勵誘導的是零質量流量射流,不可避免的會在射流結構周圍有垂直向下的流動。方格網狀激勵器由許多陣列式的小方格激勵器構成,因此,單一的射流在三維演化過程中會受到周圍激勵器誘導渦下洗側的影響,極易誘發剪切層不穩定性,導致射流并不是嚴格意義上沿著垂直方向。相比之下,方格網狀5×5構型的間距相比方格網狀10×10的小,故受到影響更大,射流方向偏移更多些。
2.4 翼型減阻風洞實驗
采用在前文中激勵特性較為典型的工作模式,研究不同激勵強度對方格網狀10×10構型的影響規律。選擇來流速度為15 m/s,保持電壓峰值Up-p=8 kV,改變相應的脈沖頻率(10~200 Hz)與占空比(5%~100%),探究最佳減阻效果。
基于尾跡計算翼型總阻力,并采用式(3)計算阻力系數變化:
(3)
式中:Cd,baseline與Cd,plasma分別代表基準與激勵狀態下的阻力系數,將結果數據利用MATLAB 進行插值分析繪制出相應減阻率隨脈沖頻率和占空比變化的云圖,如圖7所示。

圖7 15 m/s減阻效果云圖
可見,減阻率在-1.3%~3.5%之間。在占空比100%時,即定常激勵,此時激勵強度最高,故對流場的產生較強擾動,對應最高的減阻效果。分析云圖,該條件下改變占空比與脈沖頻率均能對減阻率產生一定影響,但在同一減阻率下可對應著不同的激勵參數組合,這說明激勵強度對流場擾動程度和減阻效果并不是簡單的線性關系。與前文圖4的結果相對應,脈沖頻率對于減阻率和誘導射流速度的影響并非是越高越好。
2.5 討論
前文的研究表明,等離子體激勵可以實現翼型減阻,結合PIV測試結果,其誘導產生射流可近似看成壁面法向的微吹氣,減阻機理存在相似的可能性[18]。文獻[19]表明,激勵后產生吹氣效果使條帶結構被抬升,并破壞高速條帶,取而代之是使邊界層內的能量耗散增加的穩定的小尺度結構,使近壁面出現再層流化現象,進而降低摩擦阻力。文獻[20]表明,吹氣可以將近壁面的渦結構吹離,減少其與壁面之間的相互作用,并破壞大尺度的渦結構,使其無法沿流向發展成為流向渦,從而減小摩擦阻力。與之相似,激勵后的方格網狀激勵器從宏觀層面來看形成了一整塊矩形的吹氣面,將近壁面的流體結構整體抬升,破壞近壁面渦結構,抑制條紋瞬態增長[21],進而抑制近壁面湍流生成,減小摩擦阻力。
3 結論
本文研究了方格網狀激勵器的激勵特性,后將其應用在翼型上研究其減阻效果,并對減阻機理做出了推測。從激勵參數測試結果可知:激勵器的激勵強度隨著電壓與占空比的增大而增大,放電現象越明顯,平均誘導射流速度越大。而射流隨著脈沖頻率的增大,結構趨于穩定,且消散速度變慢,但射流速度的變化呈現先增后減的趨勢,最高瞬時速度可達3.02 m/s。基于風洞測試結果可知:在來流15 m/s條件下改變激勵強度,構建減阻效果云圖,結果從增阻變化到減阻(-1.3%~3.5%),且變化關系非線性。通過這些結論,方格網狀激勵器在翼型減阻的實際應用能力得到了一定的驗證,但減阻量還有待提高。激勵器激勵強度主要受放電電壓影響,而方格網狀由于激勵器組次多,電源供電能力有限,進一步提高激勵強度可以考慮選用輸出功率更大的驅動電源。但在較高的激勵電壓下,介質層容易受臭氧等物質侵蝕,最終激勵器的工作壽命會大幅衰減。故在增加激勵強度的同時還需要對激勵器的選材和結構進行進一步的優化,防止快速老化。后續還需依托風洞實驗平臺,開展更多參數對減阻效果的影響與PIV實驗,進一步揭示參數影響規律、摩擦阻力占比、流場結構與減阻機理等問題。