
牙齒三維模型牙齦線計算方法及應用
2023-05-09 05:03:47江小輝黎萬波吳重軍劉杰
軟件工程 2023年5期
關鍵詞:自動化
江小輝 黎萬波 吳重軍 劉杰






關鍵詞:隱形牙套;牙齒模型;平均曲率;自動化;工業機器人
中圖分類號:TP29 文獻標識碼:A
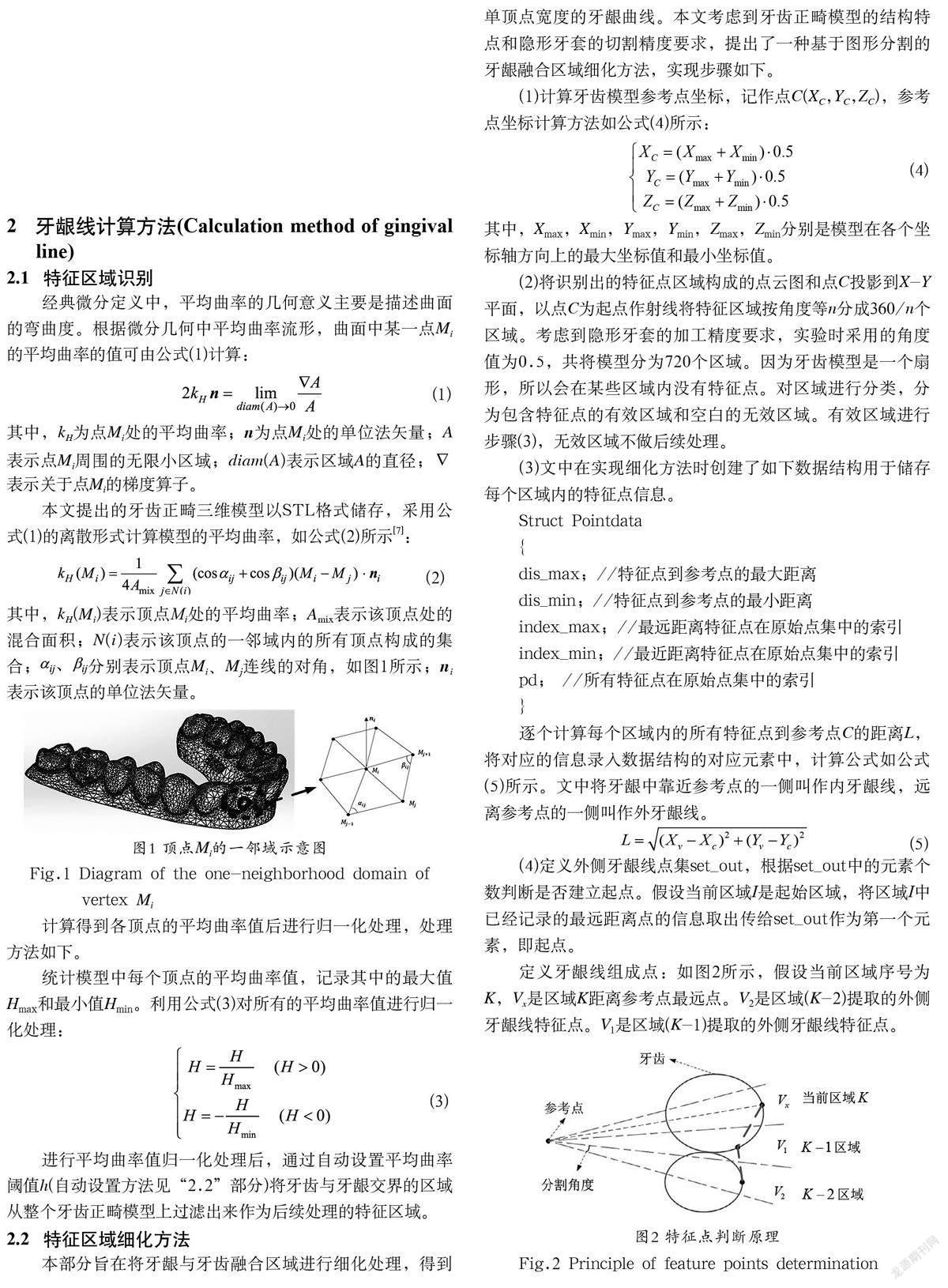
1 引言(Introduction)
隱形牙套矯治技術是20世紀90年代出現的一種牙齒正畸技術,其憑借外形美觀、方便摘戴、易清理等優勢逐漸取代了金屬牙套在牙齒矯治領域的主流地位[1]。隨著該技術的發展,市場對隱形牙套的需求量隨之上升。實現隱形牙套的自動化加工能有效提升隱形牙套加工效率,但其中的難點在于獲取驅動加工的數據。
數據獲取分為兩個部分,特征區域的識別和細化。牙齒三維模型特征識別領域主要有基于曲面的最小曲率的方法[2]和基于B樣條曲線輪廓擬合算法的方法[3]等。特征區域細化領域主要有通過形態學算子提取特征線的方法[4]、基于快速移動分水嶺算法的方法[5]以及基于活動輪廓模型的方法[6]。這些方法雖然能識別出特征曲線,但是需要設置閾值,導致難以實現自動化。
結合隱形牙套的加工需求和相關領域的研究現狀,本文提出了一種基于曲率場的牙齦線自動提取方法。該方法克服了曲率閾值設置的困難,為牙齦線數據自動化應用提供了基礎支撐。
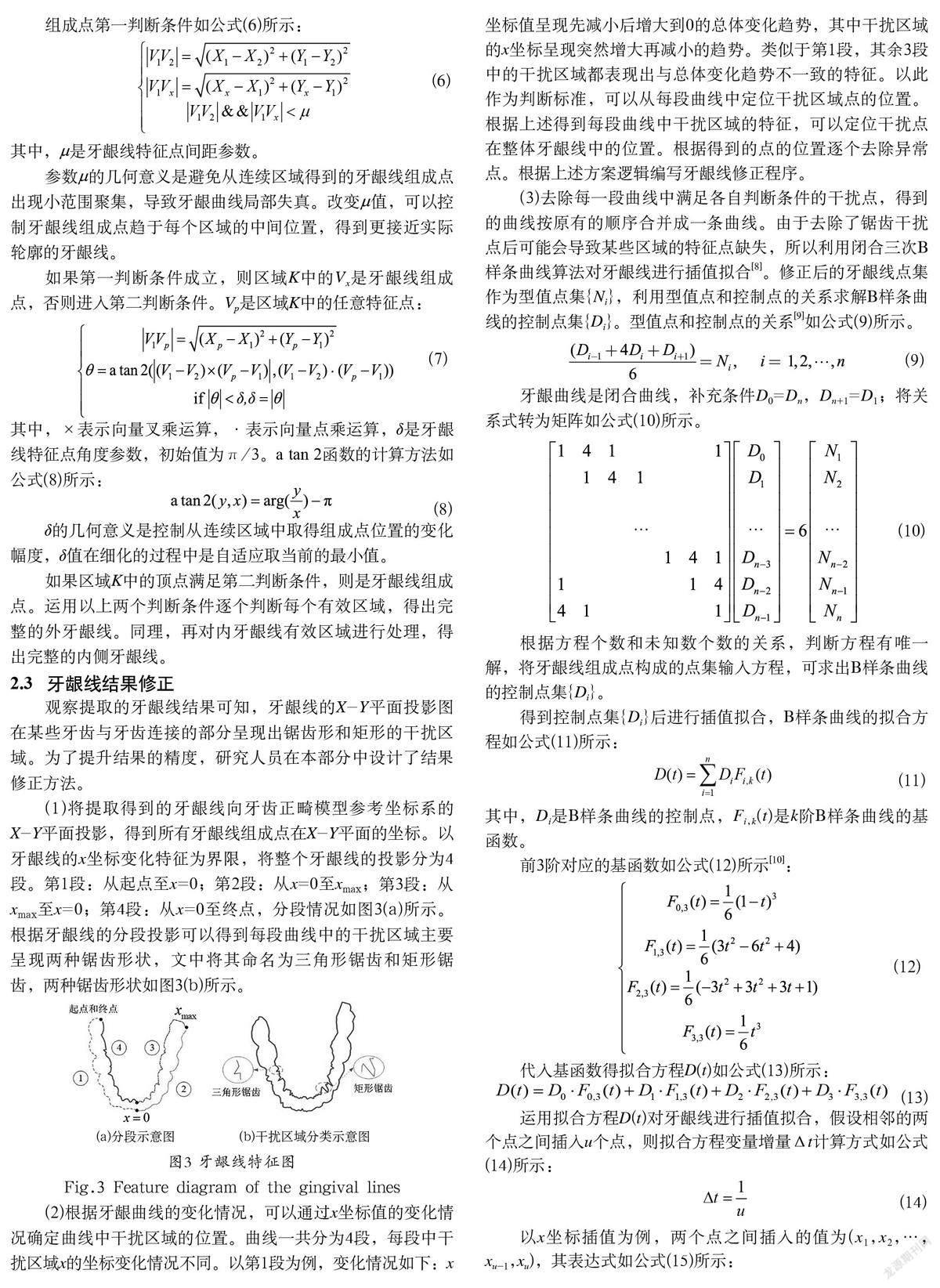
同理,可對y坐標和z坐標進行插值,最終得到的插值結果就是本文的牙齦融合區域識別提取的牙齦線特征點集。
3 程序實現過程(Implementation process of theprogram )
3.1 牙齦線提取流程
如圖4所示,對應牙齦線提取方法理論的三個部分,其實現過程也分為三個部分,分別是牙齦融合區域識別、牙齦融合區域細化和牙齦線結果修正。
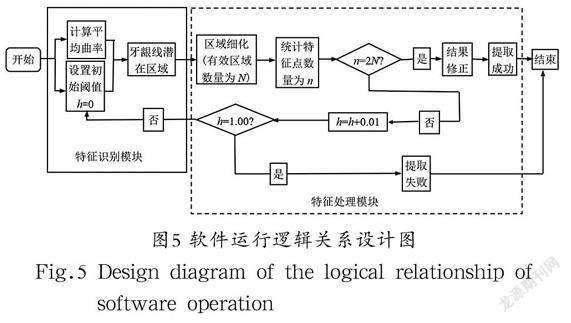
3.2 軟件運行邏輯設計
為了便于程序設計,本文將方法實現過程分為兩大模塊,分別是特征識別模塊和特征處理模塊。特征識別模塊是利用平均曲率識別牙齦融合區域的過程,特征處理模塊是將融合區域細化并修正的過程。兩個模塊運行邏輯關系和運行方式如圖5所示。
因為每個有效區域會貢獻兩個分別屬于內外牙齦線的特征點,所以理論上得到的牙齦線組成點的個數是有效區域數量的2倍。經過細化過程得到的牙齦線的組成點數量作為平均區域閾值h設置是否合理的評價標準,通過程序判斷是否提取成功。將細化結果與閾值h的設置過程結合,實現了平均曲率閾值h的自動化設置。
3.3 可視化界面設計
研究過程中開發了基于QT的程序界面,利用OpenGL庫作為軟件的三維渲染工具,如圖6所示。用戶可以利用程序界面導入模型、提取牙齦線、查看提取結果和保存提取數據。
4 實驗和結果(Experiments and results)
4.1 不同畸形類型
牙齒模型提取實驗實驗使用了160個來自牙齒畸形病患的牙齒模型,驗證該方法的有效性和準確性,實驗結果如圖7所示。這些牙齒模型包含上頜和下頜的幾種主要的牙齒畸形類別,分別是牙齒擁擠、牙齒稀疏、下牙包覆、牙齒缺失、頜骨異常、牙齒排列異常[11]。
從圖7中可以看出,該方法針對幾種主要的牙齒畸形類別模型的牙齦線提取都是有效的,通過軟件操作即可得到牙齦線的組成點坐標,但是對于缺牙類型模型得不到理想的提取結果,如圖7中的虛線框內所示。
4.2 修正方法有效性測試
為了驗證文中提出的修正方法的有效性,本節選擇5個模型的牙齦線提取結果進行修正測試。分別將每個實驗對象輸入結果修正程序進行修正處理,統計修正結果如圖8所示。
通過對比分析,證明了修正方法的有效性,明顯去除了干擾區域,比修正前的牙齦曲線更接近真實的牙輪廓。
4.3 隱形牙套切割路徑規劃
得到向量c后進行單位化,可得姿態數據。通過公式(18)計算求得姿態矩陣,可得刀具路徑數據:
4.4 隱形牙套加工實驗
4.4.1 隱形牙套加工仿真實驗
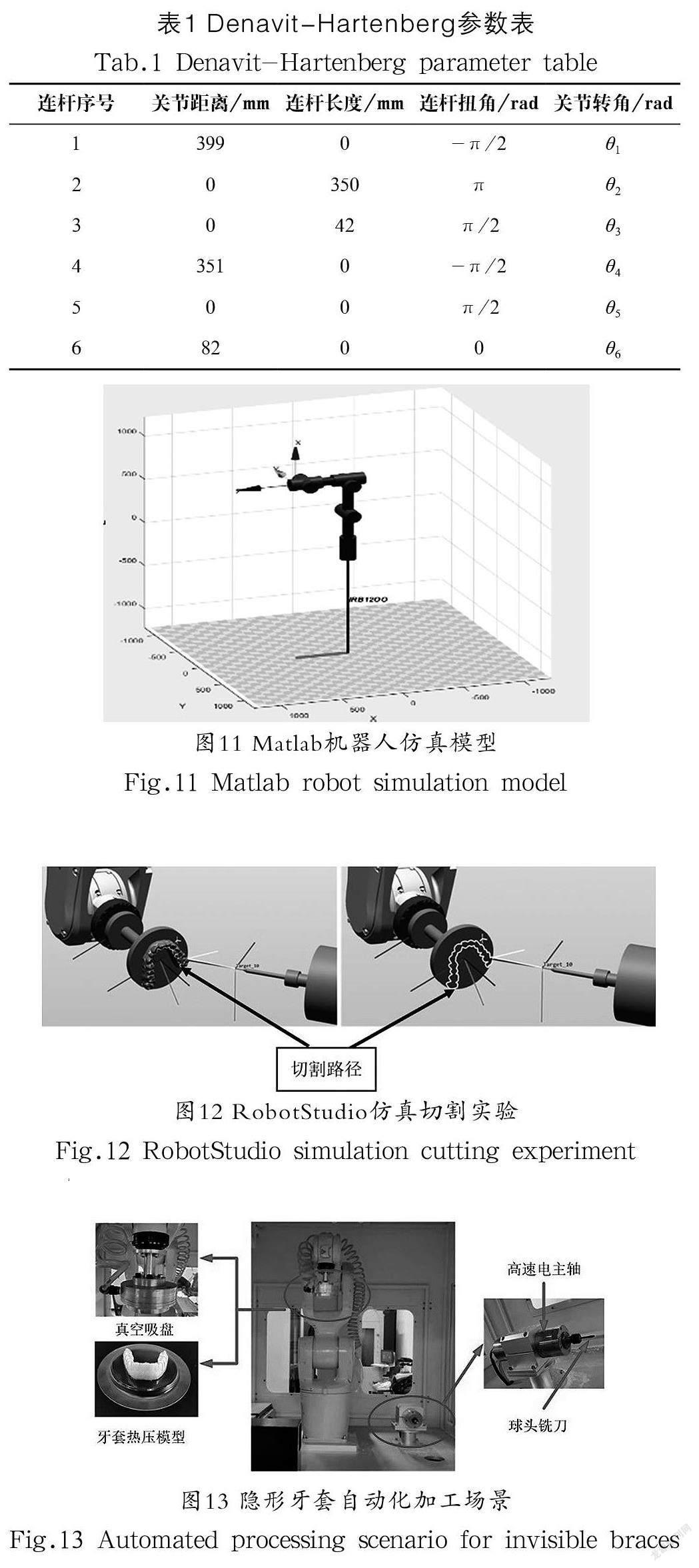
仿真實驗分為兩步,分別是利用Matlab機器人工具箱進行可行性仿真和利用RobotStudio進行切割場景仿真。首先基于表1的參數建立機器人運動學模型如圖11所示,然后導入上述計算得到的刀位點姿態數據,結合機器人工具解函數進行仿真。
利用Matlab檢測過刀具路徑的可行性后,在RobotStudio中建立隱形牙套的加工場景,如圖9所示,將刀具姿態數據編譯成ABB機器人的執行代碼導入RobotStudio機器人虛擬控制系統中,生成加工軌跡,如圖12所示。
從仿真結果可知,加工軌跡是沿著模型的牙齦線形狀運動,仿真結果符合預期。
4.4.2 隱形牙套切割實驗
根據虛擬加工場景規劃實際加工場景,如圖13所示。
實驗中采用的主軸轉速為20000 r/min,球頭銑刀直徑的參數為R1·4·D4·50L·2F,機器人的運行速度為100%、50%,分別如圖14和圖15所示,實驗過程中以某熟練工人手工切割隱形牙套作為對照,實驗結果如圖16所示。
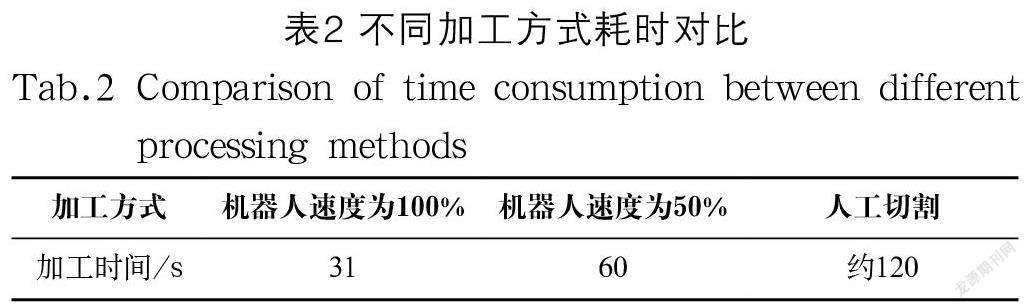
利用本文的提取方法計算牙齦線數據,用于機器人路徑規劃,實現了自動化切割取代人工切割,并且得到的隱形牙套形狀符合牙齦輪廓,說明該牙齦線提取方法的可行性。如圖14所示,在機器人運行速度為100%的情況下,加工時間最短,但隱形牙套的脫模邊界粗糙且有毛刺。如圖15所示,在機器人運行速度為50%時,脫模邊界光滑,牙套邊界無毛刺。如圖16所示,人工切割路徑只能沿直線切割,后期需要修形得到牙齦輪廓。相對于人工切割,基于牙齦線數據的自動化切割能直接得到符合患者牙齦輪廓的牙套,并且在運行速度為50%時,隱形牙套的加工質量較好,而采用人工切割方式的切割質量不穩定。如表2所示,以機器人運行速度為50%為例,隱形牙套的自動化加工比人工加工提升效率約50%。同時,自動化切割能得到近似牙齦輪廓的牙套形狀,提升了用戶的牙套佩戴體驗。
5 結論(Conclusion)
針對隱形牙套的加工效率低、工藝煩瑣等問題,本文提出了一套從獲取數據到指導加工的隱形牙套自動化加工方法,得出的結論如下。
(1)文中提出了一種基于圖形分割的特征區域細化方法,結合曲率特征實現了自動提取牙齦線數據。針對牙齦線數據設計了修正方法,提升了牙齦線提取方法應用的穩定性。
(2)基于Qt開發平臺設計了牙齦線可視化界面并編寫了牙齦線提取程序。利用不同類型的牙齒模型在該程序中進行提取實驗,驗證了牙齦線提取方法的可行性。
(3)將程序提取的牙齦線數據用于隱形牙套切割實驗,實現了隱形牙套的自動化切割工藝流程。相對于人工切割,在保證切割質量的前提下,本文所提方法提升效率約為50%,為后續探究工藝參數對切割質量的影響提供了理論及實踐基礎。
作者簡介:
江小輝(1986-),男,博士,教授.研究領域:高性能制造工藝與裝備.
黎萬波(1998-),男,碩士生.研究領域:智能制造技術.
吳重軍(1988-),男,博士,副教授.研究領域:智能裝備優化設計.
劉杰(1989-),男,碩士,工程師.研究領域:3D打印技術.
猜你喜歡
經營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 21:28:54
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:49:55
科學與財富(2016年28期)2016-10-14 19:33:38
科學與財富(2016年28期)2016-10-14 03:14:22
