基于BDS/GPS導航的公路智能化作業系統設計與應用
2023-05-09 22:41:24朱光祖
西部交通科技 2023年12期
朱光祖
摘要:廣西一些橫穿崇山峻嶺地帶的高速公路具有橋隧多、邊坡多且陡峭等特征,為了保障這些高速公路施工作業人員的安全并提高管理效率,文章提出并設計了基于BDS/GPS雙模式導航系統的智能公路作業系統,通過智能導航、感知和預警等方式,有效突破傳統現場管理的短板,使施工管理達到高效化和智能化。
關鍵詞:高速公路;智能化;DBS;GPS
中圖分類號:U491.2 A 61 202 3
0 引言
近年來,隨著高速公路里程的不斷增加,各地高速公路在施工養護上投入了大量的人力和資金。隨著智慧交通“云計算、大數據、物聯網、移動互聯網”等新一代信息技術的發展和突破,公路養護也逐漸邁入“智能養護”的行列[1]。
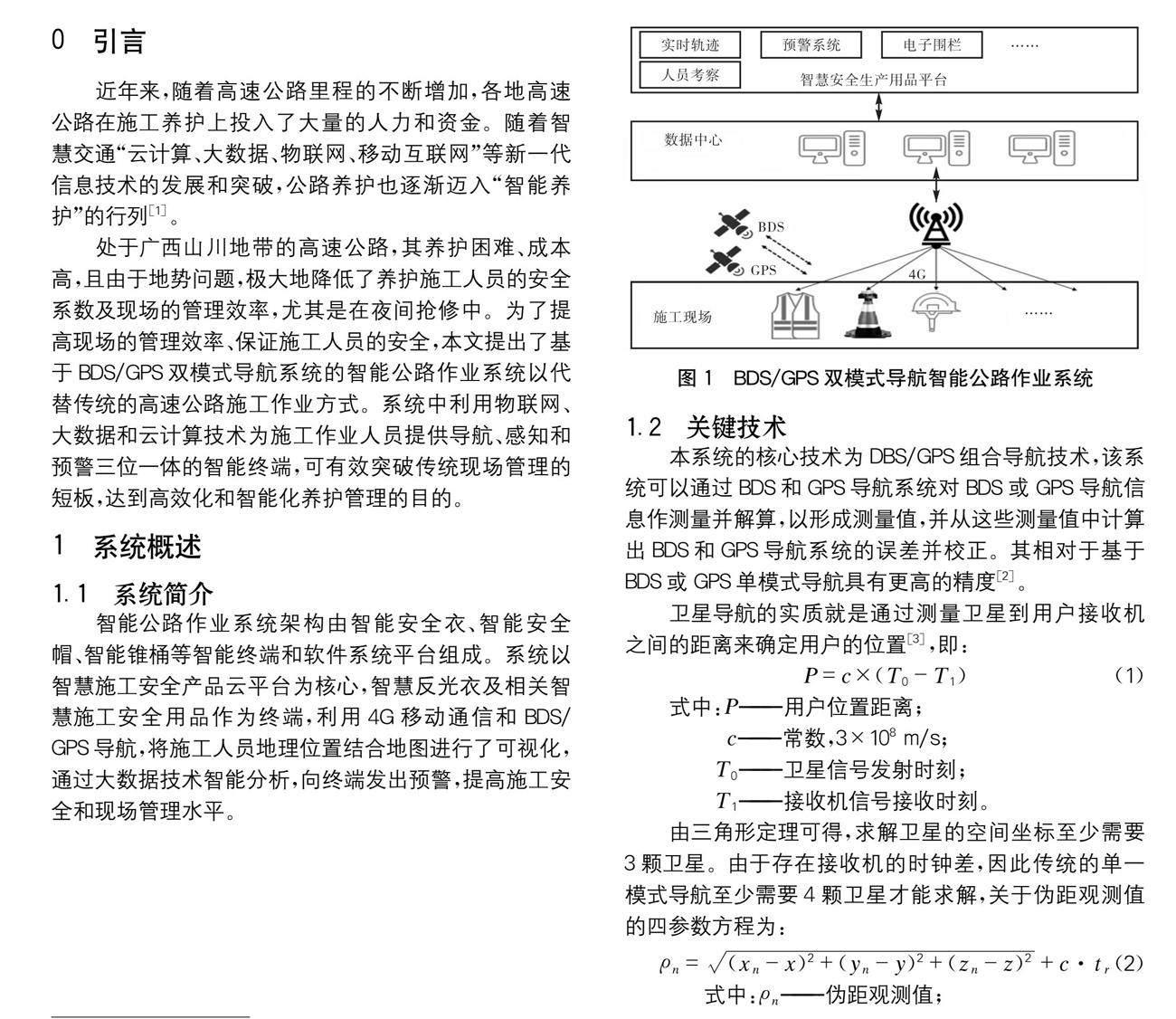
處于廣西山川地帶的高速公路,其養護困難、成本高,且由于地勢問題,極大地降低了養護施工人員的安全系數及現場的管理效率,尤其是在夜間搶修中。為了提高現場的管理效率、保證施工人員的安全,本文提出了基于BDS/GPS雙模式導航系統的智能公路作業系統以代替傳統的高速公路施工作業方式。系統中利用物聯網、大數據和云計算技術為施工作業人員提供導航、感知和預警三位一體的智能終端,可有效突破傳統現場管理的短板,達到高效化和智能化養護管理的目的。
1 系統概述
1.1 系統簡介
智能公路作業系統架構由智能安全衣、智能安全帽、智能錐桶等智能終端和軟件系統平臺組成。系統以智慧施工安全產品云平臺為核心,智慧反光衣及相關智慧施工安全用品作為終端,利用4G移動通信和BDS/GPS導航,將施工人員地理位置結合地圖進行了可視化,通過大數據技術智能分析,向終端發出預警,提高施工安全和現場管理水平。
1.2 關鍵技術
本系統的核心技術為DBS/GPS組合導航技術,該系統可以通過BDS和GPS導航系統對BDS或GPS導航信息作測量并解算,以形成測量值,并從這些測量值中計算出BDS和GPS導航系統的誤差并校正。其相對于基于BDS或GPS單模式導航具有更高的精度[2]。
衛星導航的實質就是通過測量衛星到用戶接收機之間的距離來確定用戶的位置[3],即:
P=c×(T0-T1)(1)
式中:P——用戶位置距離;
c——常數,3×108 m/s;
T0——衛星信號發射時刻;
T1——接收機信號接收時刻。
由三角形定理可得,求解衛星的空間坐標至少需要3顆衛星。由于存在接收機的時鐘差,因此傳統的單一模式導航至少需要4顆衛星才能求解,關于偽距觀測值的四參數方程為:
ρn=(xn-x)2+(yn-y)2+(zn-z)2+c·tr (2)
式中:ρn——偽距觀測值;
(xn,yn,zn)——衛星坐標;
(x,y,z)——接收機坐標;
c——常數;
tr——接收機時鐘差。
本文采用的BDS/GPS組合導航技術還需要考慮BDS系統和GPS系統的時間差TB_D,因此該系統關于偽距觀測值的五參數(x,y,z,tr,TB_D)方程組可表示為:
ρB1=(x-xB1)2+(y-yB1)2+(z-zB1)2+c·tr+nρB1ρB2=(x-xB2)2+(y-yB2)2+(z-zB2)2+c·tr+nρB2ρBm=(x-xBm)2+(y-yBm)2+(z-zBm)2+c·tr+nρBmρG1=(x-xG1)2+(y-yG1)2+(z-zG1)2+c·tr+TB_D+nρG1ρG2=(x-xG2)2+(y-yG2)2+(z-zG2)2+c·tr+TB_D+nρG2ρGn=(x-xGn)2+(y-yGn)2+(z-zGn)2+c·tr+TB_D+nρGn
(3)
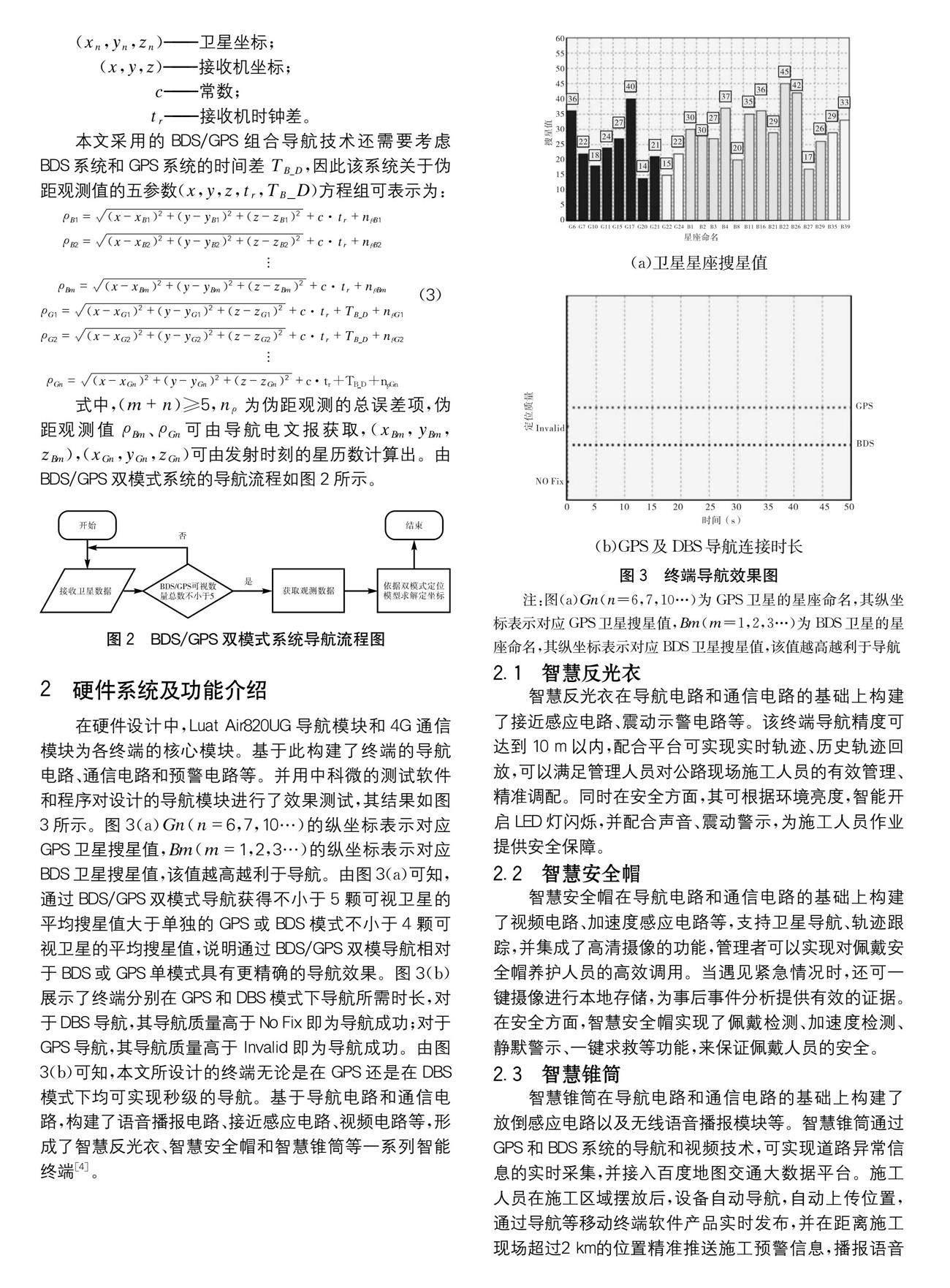
式中,(m+n)≥5,nρ為偽距觀測的總誤差項,偽距觀測值ρBm、ρGn可由導航電文報獲取,(xBm,yBm,zBm),(xGn,yGn,zGn)可由發射時刻的星歷數計算出。由BDS/GPS雙模式系統的導航流程如圖2所示。
2 硬件系統及功能介紹
在硬件設計中,Luat Air820UG導航模塊和4G通信模塊為各終端的核心模塊。基于此構建了終端的導航電路、通信電路和預警電路等。并用中科微的測試軟件和程序對設計的導航模塊進行了效果測試,其結果如圖3所示。圖3(a)Gn(n=6,7,10…)的縱坐標表示對應GPS衛星搜星值,Bm(m=1,2,3…)的縱坐標表示對應BDS衛星搜星值,該值越高越利于導航。由圖3(a)可知,通過BDS/GPS雙模式導航獲得不小于5顆可視衛星的平均搜星值大于單獨的GPS或BDS模式不小于4顆可視衛星的平均搜星值,說明通過BDS/GPS雙模導航相對于BDS或GPS單模式具有更精確的導航效果。圖3(b)展示了終端分別在GPS和DBS模式下導航所需時長,對于DBS導航,其導航質量高于No Fix即為導航成功;對于GPS導航,其導航質量高于Invalid即為導航成功。由圖3(b)可知,本文所設計的終端無論是在GPS還是在DBS模式下均可實現秒級的導航。基于導航電路和通信電路,構建了語音播報電路、接近感應電路、視頻電路等,形成了智慧反光衣、智慧安全帽和智慧錐筒等一系列智能終端[4]。
2.1 智慧反光衣
智慧反光衣在導航電路和通信電路的基礎上構建了接近感應電路、震動示警電路等。該終端導航精度可達到10 m以內,配合平臺可實現實時軌跡、歷史軌跡回放,可以滿足管理人員對公路現場施工人員的有效管理、精準調配。同時在安全方面,其可根據環境亮度,智能開啟LED燈閃爍,并配合聲音、震動警示,為施工人員作業提供安全保障。
2.2 智慧安全帽
智慧安全帽在導航電路和通信電路的基礎上構建了視頻電路、加速度感應電路等,支持衛星導航、軌跡跟蹤,并集成了高清攝像的功能,管理者可以實現對佩戴安全帽養護人員的高效調用。當遇見緊急情況時,還可一鍵攝像進行本地存儲,為事后事件分析提供有效的證據。在安全方面,智慧安全帽實現了佩戴檢測、加速度檢測、靜默警示、一鍵求救等功能,來保證佩戴人員的安全。
2.3 智慧錐筒
智慧錐筒在導航電路和通信電路的基礎上構建了放倒感應電路以及無線語音播報模塊等。智慧錐筒通過GPS和BDS系統的導航和視頻技術,可實現道路異常信息的實時采集,并接入百度地圖交通大數據平臺。施工人員在施工區域擺放后,設備自動導航,自動上傳位置,通過導航等移動終端軟件產品實時發布,并在距離施工現場超過2 km的位置精準推送施工預警信息,播報語音提示車輛提前減速,安全通過施工區域,保障人身安全,提升社會安全效益。
3 軟件平臺設計
基于BDS/GPS雙模式導航系統的智能公路作業系統軟件主要分為后臺管理中心和數據處理服務器。后臺服務器軟件將4G節點傳輸回來的各終端數據進行分類存儲,并通過自定義數據處理方案進行分析。然后通過SVG矢量圖技術將后臺數據可視化,并提供給標準化接口的前端軟件應用[5]。
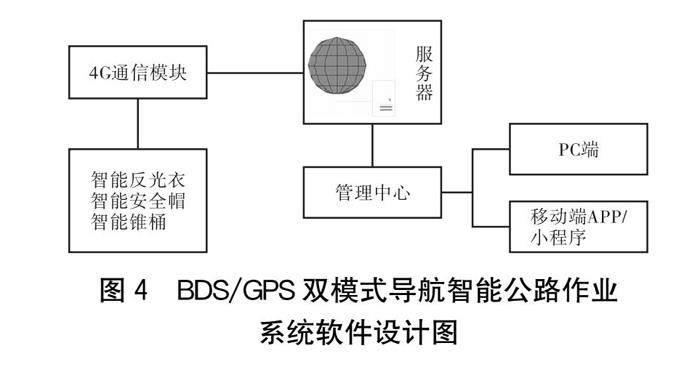
軟件平臺的主要功能包括信息采集、遠程控制和自動警示三大部分。其網絡拓撲圖如圖4所示。
軟件拓撲圖包含了智能反光衣、安全帽、錐桶等終端,以及4G通信模塊、服務器、管理中心和用戶端。在服務器端,后臺服務器端通過4G網關進行通信,并通過加密的MQTT服務會話,提升數據并發和數據傳輸的有效性和安全性,保證了數據的實時收發和處理。
在用戶端可以通過手機APP、微信小程序或PC網頁,觀察智能終端佩戴者的行動軌跡或安裝狀況,以及控制智能終端發出示警或語音播報。實現智慧反光衣、智慧安全帽和智慧錐桶等的聯動,為現場的施工人員提供安全保障。如圖5所示,監控界面可顯示智能反光衣佩戴者的行動軌跡以及由智慧錐桶圈起來的危險區域,上級管理人員可以通過用戶平臺有效調動現場工作人員,提高施工的效率。
4 系統的應用
目前,本系統已應用于賀州至巴馬高速公路、南平高速公路等各個路段的養護。所提出系統所包含的終端,均為道路養護人員作業的必需品,可以有效地使施工人員從傳統的反光衣、安全帽、錐桶等過渡到智能產品使用中。使用智慧安全錐桶加警示牌提醒過往車輛減速,降低車速率平均可達40%,而使用傳統錐桶加警示牌,平均降低車速率僅為25%;在高速公路邊坡橋梁等危險地段作業,穿戴智能安全帽作業時,平均每小時通過現場的環境分析對施工人員的安全提示可達13次,大大提高了現場施工人員的安全防范意識;在現場施工人員調用中,調用智慧安全衣和安全帽穿戴人員相對于調用穿戴傳統安全衣和安全帽的施工人員節省了60%的時間[時間節省率=(傳統安全調用時間-智慧安全調用時間)/傳統安全調用時間]。通過應用期間維護通信光纜的過程表明,使用智能作業產品進行施工作業,相對于使用傳統產品在施工人員的安全保障、管理效率方面均有提高。
5 結語
本文針對當前高速公路施工存在的安全隱患設計了一套適用于高速公路流動性的智能作業系統。系統采用BDS/GPS雙模式導航技術,相對于傳統的單一模式導航方式,導航的效果得到了提升,并通過4G無線通信的方式,保證了現場數據返回的可靠性和時效性。該系統提高了高速公路上流動性施工作業人員的安全保障,結合軟件運維平臺有效地提高了管理的可調性,節省了運維人力,并通過實際運用案例驗證了所提出系統的可實施性。
參考文獻
[1]高輝光.基于大數據的高速公路智能養護系統研究[J].交通科技與管理,2021(25):2.
[2]邵志超,熊偉峰,張建通,等.高速公路智慧養護管理系統設計探究[J].中國交通信息化,2022(S1):444-448.
[3]康朋飛.GPS/BDS組合系統偽距聯合單點導航算法的對比分析[J].電子設計工程,2019,27(19):127-130,135.
[4]陳 亮,李 超,師鵬宇,等.BDS/GPS組合導航定位研究[J].無線電工程,2020,50(3):227-231.
[5]李苗華,戴劍軍,李向東,等.基于智慧路錐的取消高速公路省界收費站工程占道施工安全保障方案研究[J].湖南交通科技,2021,47(4):138-140.
收稿日期:2023-07-20
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年20期)2021-11-20 05:43:18
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國交通信息化(2016年9期)2016-06-06 07:42:10
能源(2015年8期)2015-05-26 09:15:56
小說月刊(2014年4期)2014-04-23 08:52:20