機器人運動學模型參數修正
2023-05-10 10:25:16南京航空航天大學航空學院聞了然張方
數字技術與應用 2023年4期
關鍵詞:模型
南京航空航天大學航空學院 聞了然 張方
在工業自動化的大背景下,企業對工業機器人的精度要求越來越高。為了減少機器人在制造、安裝、測量、連桿變形等因素下造成的定位誤差,本文以一六軸工業機器人為研究對象,提出一種基于最小二乘法和機器人正運動學的運動學模型參數修正法,通過對比分析末端執行器的位置信息,對現有的運動學模型進行參數修正,從而降低工業機器人的模型誤差,為機器人后續的軌跡規劃工作提供了幫助。
隨著科學技術的不斷更新與發展,工業機器人在搬運、噴釉、弧焊等方面有著十分突出的貢獻,對末端執行器的精度要求也變得更高[1]。工業機器人的定位精度決定著機器人工作性能的優劣。然而在工業生產過程中,工業機器人不可避免的存在誤差,這些誤差主要分為兩個部分:制造、安裝以及長時間工作導致的磨損和變形引起的幾何誤差和溫度、機器自重等因素導致的非幾何誤差。上述的幾種誤差最終都會在末端執行器的位姿信息中體現出來,而位姿信息又與機器人的運動學模型相關。為了降低機器人的定位誤差,需要對原有的運動學模型進行修正。
當前機器人運動學模型的建模方法普遍采用的是1955 年Danevit 和Hartenberg 提出的D-H 建模法[2]。而為了降低工業機器人定位精度誤差,通常會對末端執行器進行反饋檢測,實現全閉環控制[3,4]。這種方法雖然可以達到很高的精度,但是計算復雜,成本投入較高,不適用于焊接等精度要求不是特別高的工作。
針對該問題,本文利用D-H 建模法得出的變換矩陣,建立末端位姿信息與各運動學模型參數的關系式,并提出一種基于最小二乘法的改進模型修正法。在誤差允許范圍內僅測量末端在不同關節角下的理論位置和實際位置,而忽略姿態信息,完成運動學模型的參數修正,從而大大降低了運算難度,同時滿足了精度要求,具有良好的工程實用性。
1 機器人運動學分析
1.1 機器人基本結構及D-H 參數
機器人可以視作由一系列剛體通過關節連接而成的一個運動鏈,通常境況下,我們稱這些剛體為連桿,而關節將兩個相鄰的連桿連接起來。在進行機械臂結構設計時,通常優先選擇僅具有一個自由度的關節作為連桿的連接方式,即轉動關節或移動關節[5]。
本文以錢江QJRH4-1A 型機器人為例,從底部固定的基本連桿開始從下往上開始編號,第一個可動連桿為連桿1,直至連桿6。同時,在工作空間中,為了使末端執行器擁有6 個自由度,需要為機器人配置6 個旋轉關節,前3 個主要確定位置,后3 個主要確定姿態。
一般情況下,在進行機器人D-H 參數設計時,需要考慮連桿長度、連桿轉角、連桿偏距和關節角4 個參數[6]。
參考實體結構圖建立機器人連桿坐標系,其中基坐標系在1 軸位置,4-6 連桿坐標系均在5 軸上,具體如圖1 所示。

圖1 錢江QJRH4-1A 型機器人連桿坐標系Fig.1 Linkage coordinate system of Qianjiang QJRH4-1A robot
通過對官方給出的模型圖進行測量,該機器人的D-H 參數表如表1 所示。
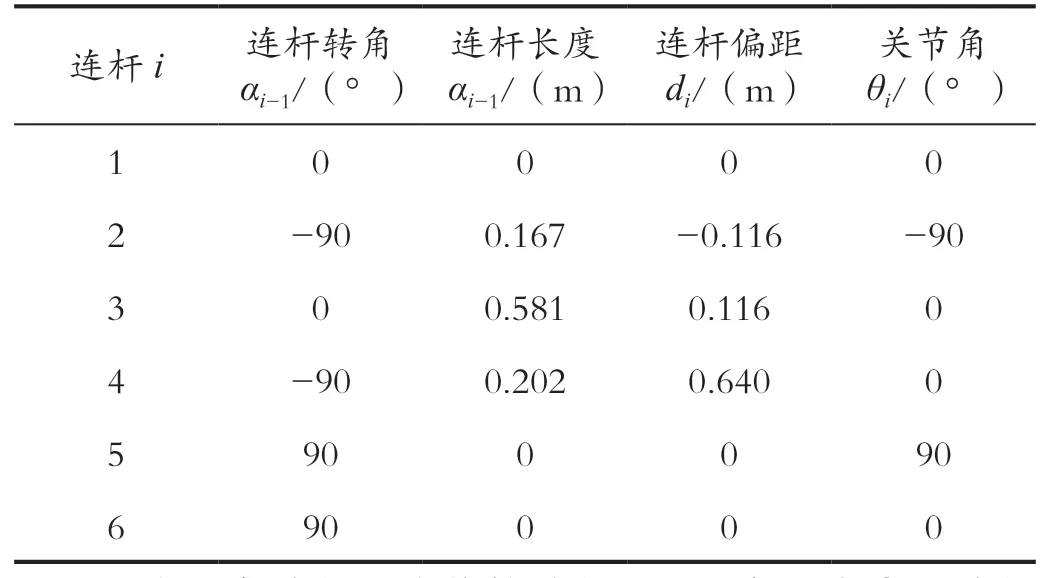
表1 錢江QJRH4-1A 型機器人D-H 參數表Tab.1 Table of D-H parameters of for Qianjiang QJRH4-1A robot
因為6 個關節均為旋轉關節,D-H 參數表中,關節角一欄數值為機器人在零位時的數據,其本身是變量,取值范圍不能超過限位角。
1.2 機器人正運動學
正運動學的主要思路是已知機器人各關節角,計算求解出末端執行器在基連桿坐標系下的位置和姿態[7]。參考圖1 標識的各連桿坐標系位置,確定基連桿坐標系為坐標系{0},原點為1 軸所在位置,之后根據D-H 參數表確定各連桿坐標系的關系。任意2 個連桿坐標系之間的關系可用四階變換矩陣T 來表示。對變換矩陣進行分塊,左上角三階矩陣為旋轉矩陣R,右上3×1 矩陣代表后一個坐標的原點在前一個坐標系下的位置坐標,最后一行為固定值。具體矩陣如公式(1)所示:
為了方便書寫,公式(1)中對三角函數進行如下簡化,后文同理:
對于本文機器人,共設有6 個連桿,將D-H 參數帶入公式(1),可得末端執行器在基連桿坐標系下的變換矩陣如公式(2)所示:
其中:
利用機器人正運動學,機器人末端的位置和姿態信息可以與連桿轉角、連桿長度等參數一一對應。這為后續的運動學模型參數修正提供了理論依據。
2 運動學模型參數誤差修正
2.1 最小二乘法原理
最小二乘法是一種數學優化技術。它通過最小化誤差(真實目標對象與擬合目標對象的差)的平方和尋找數據的最佳函數匹配。利用最小二乘法可以簡便地求出未知的數據,并使得這些求得的數據與實際數據之間誤差的平方和為最小[8]。這種方法理論成熟,計算簡便且工程適用性強,可用來對未知參數進行辨識,其具體估計過程如圖2 所示。
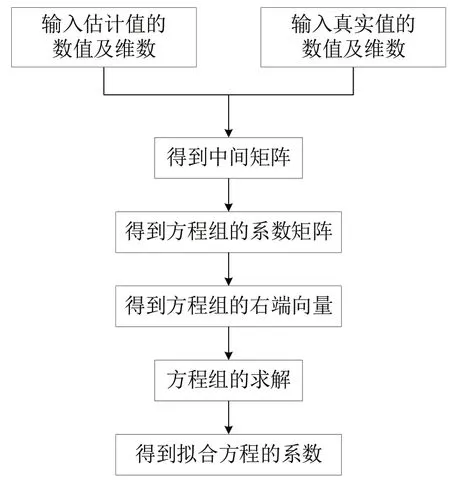
圖2 最小二乘法示意圖Fig.2 Schematic diagram of least squares method
最小二乘法的具體思路如下所示:令
設有m組實際值y,則有m組誤差值:
因為最小二乘法的約束條件是保證函數的誤差平方和最小,所以誤差向量越小,最小二乘法最終擬合出來的數據質量就越高。其具體估計過程如圖2 所示。
在這里假設最小二乘法的模型為:
在該模型中θ是變量,x是輸入的定量,y是輸出擬合值,即預測量。定義誤差:
可知誤差平方和:
上式可用以下方程組來表示,如公式(3)所示:
顯然該方程組可轉換為矩陣形式,如公式(4)所示:
該矩陣可簡化為如公式(5)所示:
于是最小二乘法的表達式可簡化為如公式(6)所示:
研究數據納入SPSS17.0軟件分析,計量資料以(± s)表示,采用t檢驗;計數資料用(%)表示,采用χ2檢驗,P<0.05差異有統計學意義。
滿足該式的向量即為最小二乘法的解。顯然,該誤差函數是關于θ的多元二次函數方程組,要求取最小值,則只需令其一階導數為0 即可。將上式對θ求導,并令其為0,可得到如公式(7)所示:
再變形可得到如公式(8)所示:
公式(8)就是最小二乘法所求的向量。
2.2 工業機器人運動學模型修正
由公式(2)可知,因為D-H 參數與變換矩陣相互獨立,工業機器人的運動學模型滿足最小二乘法要求的變量相互獨立原則,考慮機器人的焊接精度要求,這里只考慮機器人末端的位置誤差,不考慮姿態誤差,從而大大減少了計算難度[8]。結合公式(2)給出的變換矩陣,機器人末端的位置信息由以下參數決定,如公式(9)所示:
顯然影響末端位置的D-H 參數只有連桿長度和連桿偏距,對公式(9)進行偏微分可得如公式(10)所示:
根據2.1 節和公式(10)可設參數矩陣X,位置誤差矩陣參數誤差矩陣θ,其中:
接著多次測量機器人在任意關節角下末端直角坐標系實際值,并計算在各個關節角下末端的理論坐標值與誤差。將計算得出的誤差值列為矩陣放置在公式(4)右端,最終把所有矩陣帶入公式(8)計算即可,位置誤差矩陣具體為:
3 試驗數據與分析
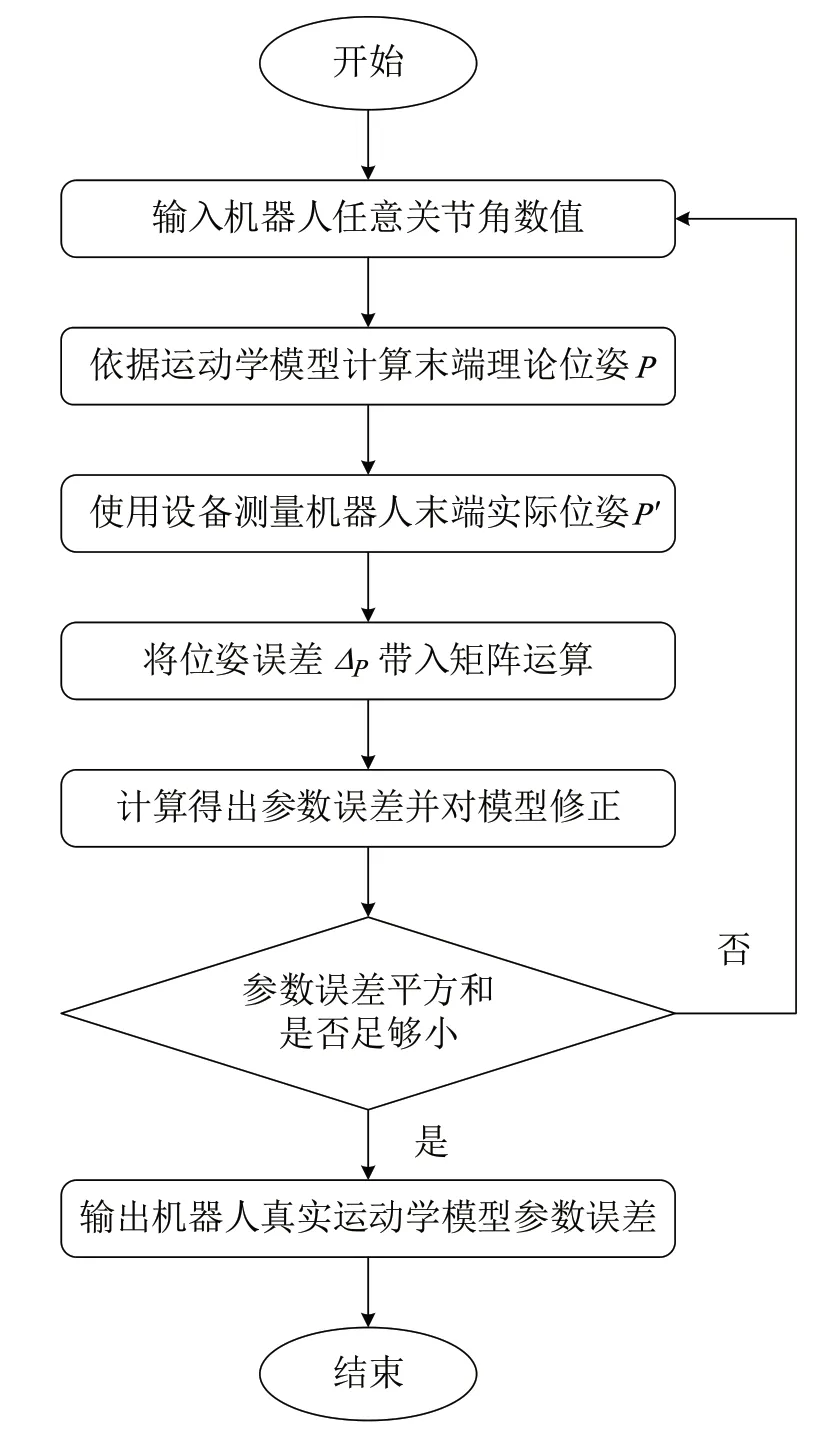
圖3 運動學模型修正流程圖Fig.3 Kinematic model correction flow chart
錢江QJRH4-1A 型機器人是一個焊接機器人,對末端位置的誤差要求在1mm 以內。試驗過程中首先使用上位機關節角示教模式使各軸旋轉到任意位置并記錄當前關節角度值,之后通過激光跟蹤儀測量得到末端的位置信息并與計算得出的理論結果進行作差,最后將該數據輸入程序中計算參數誤差。試驗現場如圖4 所示。

圖4 試驗現場Fig.4 Experimental site
試驗總共測量了10 組不同的關節角下末端的坐標值,之后將上述數據代入程序計算可得參數誤差矩陣為:
θ=[-0.901 -1.441 2.673 -0.671 0.114 0.234 0.215 -0.098 0.505 0.273 -0.226 -0.027]
為了驗證修正之后的運動學模型,將這10 組關節角代入新的D-H 參數并進行正運動學求解,與測量的末端位置進行比較,具體數據如圖5 所示。修正后的平均定位誤差從1.396mm 減少到0.582mm,小于1mm,符合焊接工程要求。
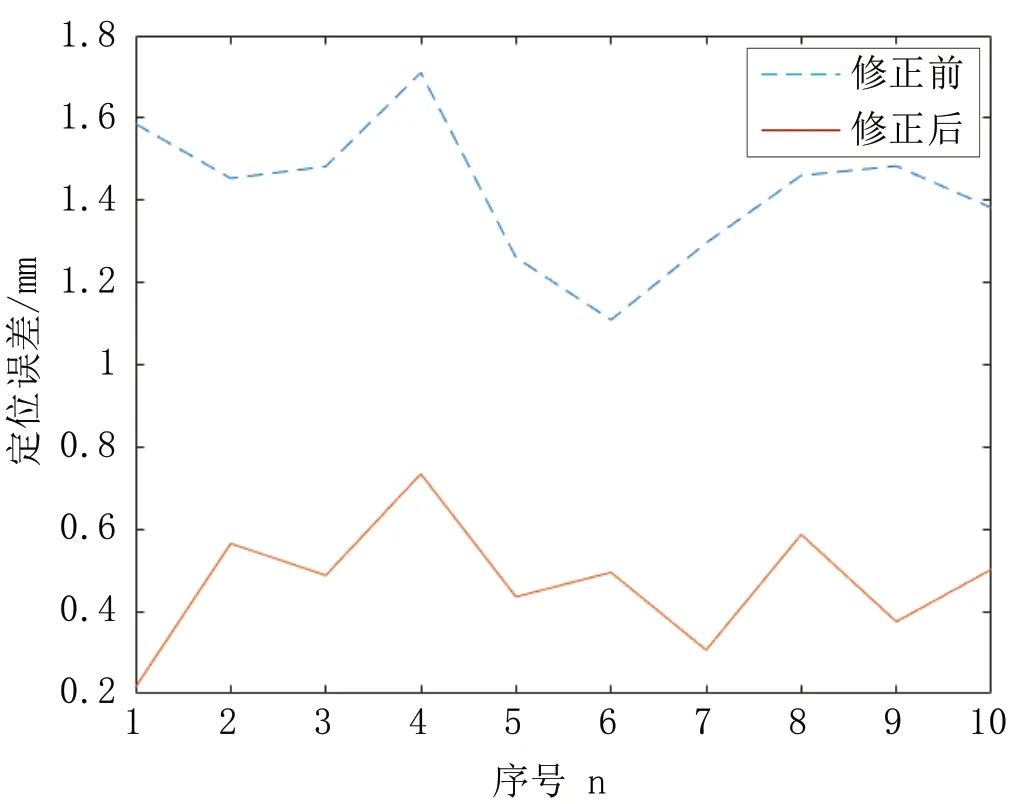
圖5 機器人末端定位誤差值Fig.5 Positioning error value of robot end
4 結論
為了提高機器人末端執行器的定位精度,本文首先對機器人進行了運動學建模,用連桿長度、連桿轉角、連桿偏距和關節角4 個參數與機器人的末端位姿信息建立了對應關系。之后集合最小二乘法,通過多次測量與計算,對機器人的運動學模型進行了修正,使其定位誤差降低在1mm 以內,同時也為后續的機器人軌跡規劃工作提供了幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
