高速公路避險(xiǎn)車(chē)道平面參數(shù)可靠性設(shè)計(jì)
2023-05-12 00:47:18張航劉洋
關(guān)鍵詞:高速公路設(shè)計(jì)
張 航 劉 洋
(武漢理工大學(xué)交通與物流工程學(xué)院 武漢 430063)
0 引 言
山區(qū)高速公路連續(xù)長(zhǎng)大下坡路段是影響高速公路總體安全水平的主要隱患,也是一直以來(lái)交通安全保障研究的重點(diǎn).根據(jù)多年實(shí)踐證明,避險(xiǎn)車(chē)道對(duì)降低山區(qū)高速公路交通事故的頻率和嚴(yán)重程度有較好的效果.
劉攀等[1]基于集料顆粒流模型進(jìn)行仿真模擬,結(jié)合實(shí)際試驗(yàn)結(jié)果,確定了避險(xiǎn)車(chē)道鋪設(shè)厚度、長(zhǎng)度等設(shè)計(jì)技術(shù)參數(shù).徐建國(guó)等[2]提出新型氣囊式避險(xiǎn)車(chē)道,運(yùn)用有限元分析軟件ABAQUS/Explicit進(jìn)行模擬,證明了其可行性.宋燦燦等[3]對(duì)避險(xiǎn)車(chē)道駛出角度及引道長(zhǎng)度、全寬型服務(wù)車(chē)道設(shè)置位置、輔助車(chē)道、左轉(zhuǎn)和右轉(zhuǎn)圓曲線處流出角度進(jìn)行了研究,通過(guò)駕駛模擬分析了避險(xiǎn)車(chē)道的各個(gè)指標(biāo),得出了各參數(shù)的建議范圍.孟志豪[4]通過(guò)分析避險(xiǎn)車(chē)道的設(shè)計(jì)理念及過(guò)程,給出了避險(xiǎn)車(chē)道的具體位置、技術(shù)要點(diǎn)和其余設(shè)施的設(shè)計(jì)方法.以上研究在避險(xiǎn)車(chē)道設(shè)計(jì)以規(guī)范值等確定性設(shè)計(jì)方法為主,相應(yīng)的參數(shù)、指標(biāo)變化對(duì)預(yù)期安全效果的影響不夠明確,這種確定性的分析方法在某些情況下不能為駕駛?cè)颂峁┳銐虻男熊?chē)安全保障,因此引入結(jié)構(gòu)工程可靠度理論,考慮變量的隨機(jī)性和不確定性,將原有設(shè)計(jì)方法中的“確定性”轉(zhuǎn)變?yōu)椤安淮_定性”,通過(guò)可靠度或失效概率來(lái)直觀地衡量道路安全性,更加符合實(shí)際情況.
可靠度理論在道路工程領(lǐng)域應(yīng)用廣泛.Navin[5]將可靠度引入公路設(shè)計(jì)領(lǐng)域,用于指導(dǎo)路線幾何設(shè)計(jì).張航等[6]運(yùn)用可靠度理論對(duì)高速公路平曲線超高進(jìn)行設(shè)計(jì).唐宗鑫等[7]利用可靠度方法計(jì)算加速車(chē)道長(zhǎng)度.王路等[8]基于可靠度計(jì)算高速公路臨界坡長(zhǎng).可靠性設(shè)計(jì)思想能考慮現(xiàn)實(shí)世界的離散性、不確定性,設(shè)計(jì)結(jié)果更為合理.因此,在道路設(shè)計(jì)領(lǐng)域,可靠性設(shè)計(jì)思想和方法正在逐步推廣應(yīng)用.文中將避險(xiǎn)車(chē)道的主要平面設(shè)計(jì)參數(shù)的相關(guān)影響因素研究與可靠度理論結(jié)合,進(jìn)行可靠性分析,將其平面設(shè)計(jì)參數(shù)指標(biāo)安全程度量化,有利于推廣可靠度在道路工程領(lǐng)域的應(yīng)用,提高道路安全性.
1 避險(xiǎn)車(chē)道
避險(xiǎn)車(chē)道一般設(shè)置于連續(xù)長(zhǎng)陡下坡的坡中段或坡底段,主要由引道、制動(dòng)坡床、救援服務(wù)車(chē)道、相關(guān)的交通標(biāo)志標(biāo)線、護(hù)欄等交通安全設(shè)施和照明與監(jiān)控報(bào)警系統(tǒng)等其他附屬設(shè)施組成,其結(jié)構(gòu)組成見(jiàn)圖1.
2 平面設(shè)計(jì)參數(shù)可靠性分析
2.1 可靠度基本概念
可靠度是指工程結(jié)構(gòu)在規(guī)定的時(shí)間和條件下,完成預(yù)期指標(biāo)、取得預(yù)期結(jié)果的概率.此概率即為可靠概率Ps,而與之對(duì)應(yīng)的為失效概率Pf,Ps+Pf=1,即將可靠度理論引入到避險(xiǎn)車(chē)道設(shè)計(jì)中,使得車(chē)輛能安全駛?cè)氡茈U(xiǎn)車(chē)道并安全減速停車(chē)的概率為Ps,反之為Pf,將避險(xiǎn)車(chē)道駛?cè)虢浅^(guò)安全值和引道長(zhǎng)度小于安全值與失效狀態(tài)相對(duì)應(yīng),并計(jì)算出失效概率以表示設(shè)計(jì)值中超出安全范圍部分可能存在的安全隱患.
2.2 構(gòu)造可靠度功能函數(shù)
1) 駛?cè)虢强煽慷裙δ芎瘮?shù) 制動(dòng)失效車(chē)輛能安全駛?cè)氡茈U(xiǎn)車(chē)道的駛?cè)虢?記為αR;設(shè)計(jì)避險(xiǎn)車(chē)道所提供的駛?cè)虢?記為αS.當(dāng)αR>αS,可認(rèn)為設(shè)計(jì)值處于失效狀態(tài),此時(shí)設(shè)計(jì)存在安全隱患.因此,可靠性功能函數(shù)可設(shè)為
Z=g(αR,αS)=αR-αS
(1)
2) 引道長(zhǎng)度可靠度功能函數(shù) 制動(dòng)失效車(chē)輛進(jìn)入避險(xiǎn)車(chē)道后,駕駛員有足夠時(shí)間進(jìn)行調(diào)整的引道長(zhǎng)度,記為L(zhǎng)R;設(shè)計(jì)避險(xiǎn)車(chē)道所提供的引道長(zhǎng)度,記為L(zhǎng)S.當(dāng)設(shè)計(jì)引道長(zhǎng)度小于安全引道長(zhǎng)度時(shí),可認(rèn)為設(shè)計(jì)值處于失效狀態(tài),此時(shí)設(shè)計(jì)存在安全隱患.因此,可靠性功能函數(shù)可設(shè)為
Z=g(LR,LS)=LS-LR
(2)
2.3 構(gòu)造計(jì)算模型
2.3.1駛?cè)虢怯?jì)算模型
車(chē)輛從離開(kāi)主線行駛至進(jìn)入避險(xiǎn)車(chē)道引道的過(guò)程中,車(chē)輛轉(zhuǎn)過(guò)的角度為駛?cè)虢?設(shè)計(jì)中常取為分流處主線最右側(cè)車(chē)道(切線)與避險(xiǎn)車(chē)道引道之間的夾角.避險(xiǎn)車(chē)道分為左轉(zhuǎn)平曲線、右轉(zhuǎn)平曲線和直線三種,本文選取主線為右轉(zhuǎn)平曲線類作為研究對(duì)象,見(jiàn)圖2.

圖2 主線為右轉(zhuǎn)曲線時(shí)避險(xiǎn)車(chē)道駛?cè)虢怯?jì)算示意圖

(3)

當(dāng)汽車(chē)在曲線上行駛時(shí)受到離心力的作用,需避免發(fā)生橫向滑移或橫向傾覆,一般有先發(fā)生橫向滑移后發(fā)生傾覆,防止橫向滑移則有
(4)
因此,將不發(fā)生橫向滑移的極限半徑R作為車(chē)輛轉(zhuǎn)向行車(chē)軌跡半徑r代入式(3)可得:
(5)
式中:αmax為避險(xiǎn)車(chē)道駛?cè)虢亲畲蟀踩?(°);v入為失控車(chē)輛在避險(xiǎn)車(chē)道入口的駛?cè)胨俣?km/h;φh為橫向附著系數(shù),一般φh=(0.6~0.7)φ,取最不利狀態(tài)下即路面為潮濕的瀝青混凝土路面,此時(shí)φ為0.4,φh為0.24;ih為路拱橫坡(一般取2%).
2.3.2引道長(zhǎng)度計(jì)算模型
避險(xiǎn)車(chē)道引道連接著公路主線與制動(dòng)坡床,其作用是保障制動(dòng)失效車(chē)輛能順利駛出主線進(jìn)入避險(xiǎn)車(chē)道,是十分重要的銜接過(guò)渡段.引道長(zhǎng)度為
(6)
式中:Lmin為避險(xiǎn)車(chē)道引道最小安全長(zhǎng)度,m ;t1為駕駛員反應(yīng)時(shí)間,s;t2為車(chē)輛對(duì)駕駛員操作響應(yīng)時(shí)間,s;v入為失控車(chē)輛在避險(xiǎn)車(chē)道入口的駛?cè)胨俣?km/h.對(duì)于現(xiàn)代車(chē)輛,t1遠(yuǎn)大于t2,因此t1+t2近似取為t1.
2.4 影響變量分析
2.4.1車(chē)輛駛?cè)氡茈U(xiǎn)車(chē)道速度v入
閻瑩等[9]對(duì)多個(gè)選定斷面得到的車(chē)速數(shù)據(jù)進(jìn)行隨機(jī)抽樣,并結(jié)合P-P概率分布圖和單樣本K-S檢驗(yàn)法進(jìn)行多種常見(jiàn)分布的檢驗(yàn),得出高速公路斷面運(yùn)行速度總體分布服從正態(tài)分布,同時(shí)可以得出制動(dòng)失效車(chē)輛駛?cè)氡茈U(xiǎn)車(chē)道速度v入也近似服從正態(tài)分布.據(jù)此選取多個(gè)不同地區(qū)和不同主線設(shè)計(jì)速度(120,100,80 km/h)的位于直線或大半徑平曲線路段的高速公路避險(xiǎn)車(chē)道進(jìn)行調(diào)查,對(duì)所選避險(xiǎn)車(chē)道入口處的大型車(chē)駛?cè)胲?chē)速進(jìn)行測(cè)量,利用統(tǒng)計(jì)分析軟件SPSS進(jìn)行單樣本K-S檢驗(yàn),結(jié)果見(jiàn)表1.

表1 高速公路避險(xiǎn)車(chē)道大型車(chē)駛?cè)胲?chē)速速度K-S檢驗(yàn)結(jié)果
從K-S檢驗(yàn)結(jié)果可以看出,主線設(shè)計(jì)速度為120,100,80 km/h所對(duì)應(yīng)的統(tǒng)計(jì)值精確顯著性水平分別為0.716、0.828、0.745,均大于95%的置信度水平代表值0.05,則所觀測(cè)樣本的總體即大型車(chē)避險(xiǎn)車(chē)道駛?cè)胲?chē)速的分布服從正態(tài)分布.
2.4.2主線車(chē)輛行駛半徑R
林雨等[10]對(duì)車(chē)輛在雙車(chē)道公路彎道的行車(chē)軌跡半徑進(jìn)行研究,通過(guò)實(shí)地測(cè)量試驗(yàn)得出各觀測(cè)斷面處的行車(chē)軌跡側(cè)向偏移量,得出行車(chē)軌跡側(cè)向偏移量近似呈正態(tài)分布,則可近似認(rèn)為車(chē)輛實(shí)際轉(zhuǎn)彎半徑也服從正態(tài)分布.研究中行車(chē)軌跡側(cè)向偏移量的正態(tài)分布參數(shù)與半徑設(shè)計(jì)值的關(guān)系,計(jì)算出不同主線設(shè)計(jì)速度下的極限最小半徑所對(duì)應(yīng)的實(shí)際轉(zhuǎn)彎半徑的正態(tài)分布參數(shù),結(jié)果見(jiàn)表2.

表2 車(chē)輛實(shí)際轉(zhuǎn)彎半徑正態(tài)分布參數(shù)
2.4.3駕駛員反應(yīng)時(shí)間t1
駕駛員的反應(yīng)時(shí)間近似服從正態(tài)分布或?qū)?shù)正態(tài)分布,總結(jié)見(jiàn)表3.
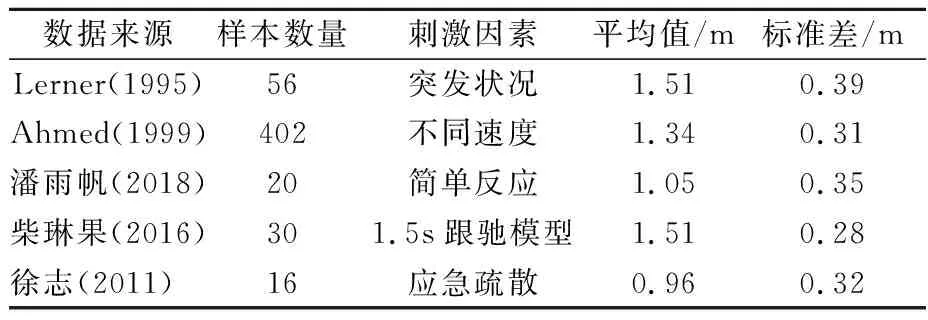
表3 不同因素的反應(yīng)時(shí)間分布參數(shù)比較
取最不利情況下的反應(yīng)時(shí)間,其服從正態(tài)分布,其均值為1.51 s,標(biāo)準(zhǔn)差為0.39 s.
3 可靠度功能函數(shù)求解
3.1 駛?cè)虢?/h3>
文獻(xiàn)[11]規(guī)定避險(xiǎn)車(chē)道與主線的夾角宜小于5°,則設(shè)計(jì)駛?cè)虢铅罶取為5°,根據(jù)駛?cè)虢强煽慷裙δ芎瘮?shù)式(1)及已建立的駛?cè)虢怯?jì)算模型,采用表1~2的變量分布參數(shù)值v入和R,通過(guò)驗(yàn)算點(diǎn)法進(jìn)行迭代計(jì)算,取允許誤差ε=10-3,得出的可靠概率Ps與失效概率Pf結(jié)果見(jiàn)表4.
由表4可知:經(jīng)過(guò)多次迭代計(jì)算直至驗(yàn)算點(diǎn)之差小于允許誤差ε=10-3后,所得相應(yīng)的可靠度概率和失效概率等值已滿足精度需求,依此可進(jìn)行可靠度分析.
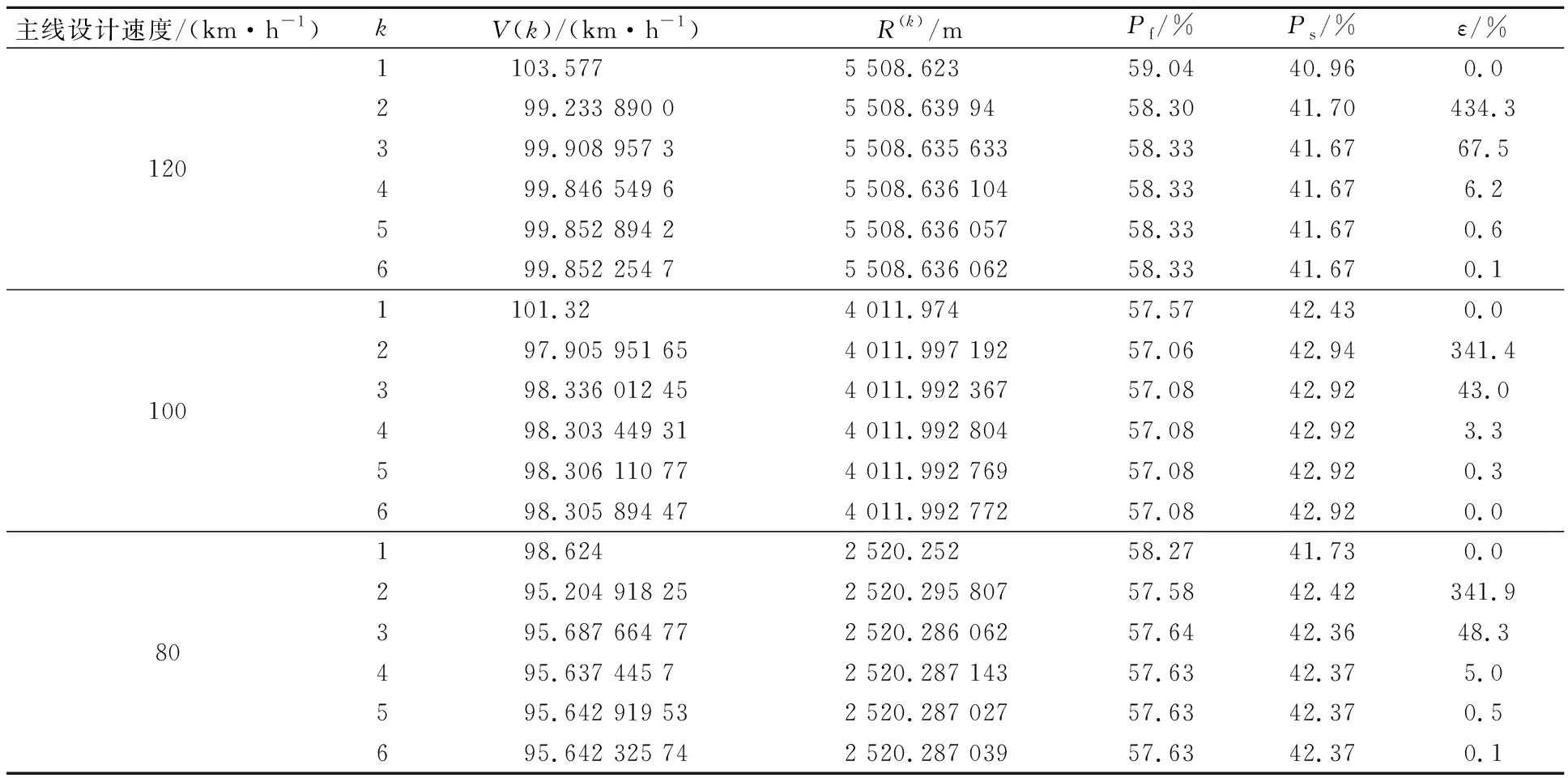
表4 駛?cè)虢强煽慷扔?jì)算結(jié)果
3.2 引道長(zhǎng)度
文獻(xiàn)[11]規(guī)定避險(xiǎn)車(chē)道引道長(zhǎng)度不宜小于70 m,則設(shè)計(jì)引道長(zhǎng)度LS取為70 m,根據(jù)引道可靠度功能函數(shù)式(2),采用表1和表3中的變量v入和t1分布參數(shù)值,通過(guò)蒙特卡羅法進(jìn)行求解.具體步驟如下.
步驟1確定抽樣模擬過(guò)程所得樣本容量,即抽樣次數(shù)取為N=10 000.
步驟2利用Matlab等計(jì)算機(jī)軟件對(duì)失控車(chē)輛駛?cè)氡茈U(xiǎn)車(chē)道速度v入、反應(yīng)時(shí)間t1抽樣模擬.其中,v入的值來(lái)源于根據(jù)表1中對(duì)應(yīng)的均值和標(biāo)準(zhǔn)差進(jìn)行正態(tài)分布抽樣模擬產(chǎn)生的隨機(jī)數(shù);t1的值來(lái)源于根據(jù)表3中對(duì)應(yīng)的均值和標(biāo)準(zhǔn)差進(jìn)行正態(tài)分布抽樣模擬產(chǎn)生的隨機(jī)數(shù),其服從正態(tài)分布,其均值為1.51 s,標(biāo)準(zhǔn)差為0.39 s.
步驟3抽樣模擬得出v入、t1的值后,將其帶入功能函數(shù)式(2)算.
步驟4若某次抽樣模擬后功能函數(shù)式中Z≥0,則定義此次抽樣為一次可靠抽樣,同理定義Z<0時(shí)為一次失效抽樣.
步驟5重復(fù)上述步驟2~4,直至抽樣次數(shù)大于10 000次.
步驟6統(tǒng)計(jì)所有的可靠抽樣與失效抽樣次數(shù),其與總體樣本容量的比值即為蒙特卡羅法得出的可靠概率與失效概率.
可靠概率Ps與失效概率Pf結(jié)果見(jiàn)表5.

表5 引道長(zhǎng)度可靠度計(jì)算結(jié)果
4 計(jì)算結(jié)果分析
現(xiàn)行的道路設(shè)計(jì)標(biāo)準(zhǔn)與規(guī)范中,未對(duì)避險(xiǎn)車(chē)道各設(shè)計(jì)參數(shù)的可靠度作出明確規(guī)定.當(dāng)設(shè)計(jì)取值處于失效狀態(tài)時(shí),可認(rèn)為與結(jié)構(gòu)的失效狀態(tài)相近,參考文獻(xiàn)[12]中對(duì)高速公路路面結(jié)構(gòu)目標(biāo)可靠度的規(guī)定來(lái)確定高速公路避險(xiǎn)車(chē)道的可靠概率和失效概率,不同安全等級(jí)對(duì)應(yīng)的可靠概率與失效概率見(jiàn)表6.

表6 不同安全等級(jí)對(duì)應(yīng)的可靠概率與失效概率
由上節(jié)中對(duì)主線設(shè)計(jì)速度為120,100,80 km/h的避險(xiǎn)車(chē)道駛?cè)虢强煽慷扔?jì)算結(jié)果,當(dāng)αS=5°時(shí),可靠概率分別為41.67%、42.92%和42.37%,均小于95%,不滿足要求.造成不滿足要求的原因可能為:一是避險(xiǎn)車(chē)道駛?cè)虢怯?jì)算模型式(1)更符合制動(dòng)失效車(chē)輛駛?cè)氡茈U(xiǎn)車(chē)道時(shí)的實(shí)際情況,比規(guī)范固定值5°更安全.二是考慮了隨機(jī)變量參數(shù)的分布與不利組合情況,避險(xiǎn)車(chē)道駛?cè)胨俣葀入和車(chē)輛主線行車(chē)軌跡半徑R并不總為設(shè)計(jì)值,具有離散性的特點(diǎn).利用可靠度功能函數(shù)計(jì)算時(shí),考慮到了駛?cè)虢怯绊憛?shù)的各種不利組合,得出的可靠概率值更能反映實(shí)際情況.
當(dāng)LS=70 m時(shí),可靠概率分別為97.26%、98.16%和98.51%,均大于95%,均滿足要求.分別根據(jù)避險(xiǎn)車(chē)道駛?cè)虢呛鸵篱L(zhǎng)度可靠度功能函數(shù)可以計(jì)算出滿足目標(biāo)可靠概率95%的駛?cè)虢亲畲蟀踩O(shè)計(jì)值和引道長(zhǎng)度推薦取值見(jiàn)表7~8.

表7 駛?cè)虢亲畲蟀踩O(shè)計(jì)值與推薦選用值
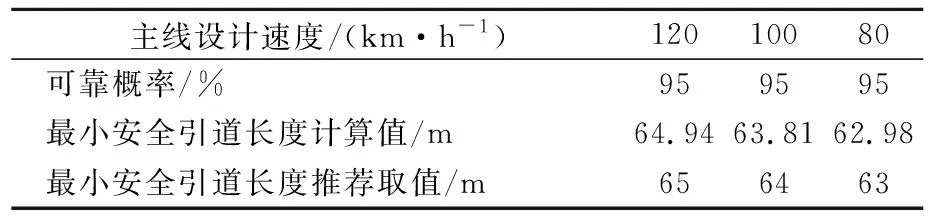
表8 引道長(zhǎng)度最小安全設(shè)計(jì)值與推薦選用值
5 工程實(shí)例
高速公路項(xiàng)目一全長(zhǎng)123.7 km,主線設(shè)計(jì)速度為80 km/h.項(xiàng)目一中連續(xù)下坡路段長(zhǎng)度為16.9 km,平均坡度為-2.9%,最大縱坡坡度為-4.2%,在坡中段和坡底段共設(shè)置4條避險(xiǎn)車(chē)道,其序號(hào)分別為1、2、3、4.
高速公路項(xiàng)目二全長(zhǎng)102.2 km,主線設(shè)計(jì)速度為100 km/h.項(xiàng)目二中連續(xù)下坡路段長(zhǎng)度為7.3 km,平均坡度為-3.2%,最大縱坡坡度為-3.8%,在坡底段設(shè)置2條避險(xiǎn)車(chē)道,其序號(hào)分別為5和6.
從相關(guān)部門(mén)調(diào)查結(jié)果可得兩條高速公路6條避險(xiǎn)車(chē)道發(fā)生的事故,表9細(xì)列出了6條避險(xiǎn)車(chē)道2019—2021全年的事故次數(shù)匯總.

表9 2019—2021全年的事故次數(shù)匯總
由表9可知:第1、2、3條避險(xiǎn)車(chē)道相比于其他三條避險(xiǎn)車(chē)道發(fā)生事故次數(shù)更多,說(shuō)明其設(shè)計(jì)參數(shù)方面有一定問(wèn)題,其避險(xiǎn)車(chē)道具有較大安全隱患.
根據(jù)這6條避險(xiǎn)車(chē)道的設(shè)計(jì)資料,對(duì)其駛?cè)虢呛鸵篱L(zhǎng)度進(jìn)行統(tǒng)計(jì),得出結(jié)果見(jiàn)表10.

表10 避險(xiǎn)車(chē)道駛?cè)虢桥c引道長(zhǎng)度統(tǒng)計(jì)表
根據(jù)規(guī)范設(shè)計(jì)駛?cè)虢铅罶=5°和設(shè)計(jì)引道長(zhǎng)度LS=70 m可得,4、5、6條避險(xiǎn)車(chē)道駛?cè)虢呛鸵篱L(zhǎng)度設(shè)計(jì)值均滿足規(guī)范,第1條避險(xiǎn)車(chē)道的駛?cè)虢呛鸵篱L(zhǎng)度的設(shè)計(jì)值均不滿足規(guī)范,第2、3條避險(xiǎn)車(chē)道只有駛?cè)虢遣粷M足規(guī)范.
針對(duì)表10中各避險(xiǎn)車(chē)道駛?cè)虢呛鸵篱L(zhǎng)度數(shù)據(jù),對(duì)每個(gè)避險(xiǎn)車(chē)道的設(shè)計(jì)參數(shù)實(shí)際取值進(jìn)行可靠性分析,利用一次二階矩法計(jì)算得出其失效概率,計(jì)算結(jié)果見(jiàn)表11~12.
由表11可知:1、2、3號(hào)避險(xiǎn)車(chē)道駛?cè)虢窃O(shè)計(jì)值的失效概率分別為61.5%、81.6%、61.5%,均大于5%,不滿可靠性要求,具有安全隱患,與表9中的事故次數(shù)實(shí)際情況相符,應(yīng)對(duì)其設(shè)計(jì)做出調(diào)整,即1、2、3號(hào)避險(xiǎn)車(chē)道的駛?cè)虢窃O(shè)計(jì)值均應(yīng)調(diào)整為不大于4.4°.4、5、6號(hào)避險(xiǎn)車(chē)道駛?cè)虢窃O(shè)計(jì)值的失效概率分別為<0.1%、<0.1%、3.6%,均小于5%,滿足可靠性要求.由表12可知:6條避險(xiǎn)車(chē)道引道長(zhǎng)度設(shè)計(jì)值的失效概率均小于5%,滿足可靠性要求,出于節(jié)省材料經(jīng)費(fèi)考慮,可取對(duì)應(yīng)的引道長(zhǎng)度建議值.
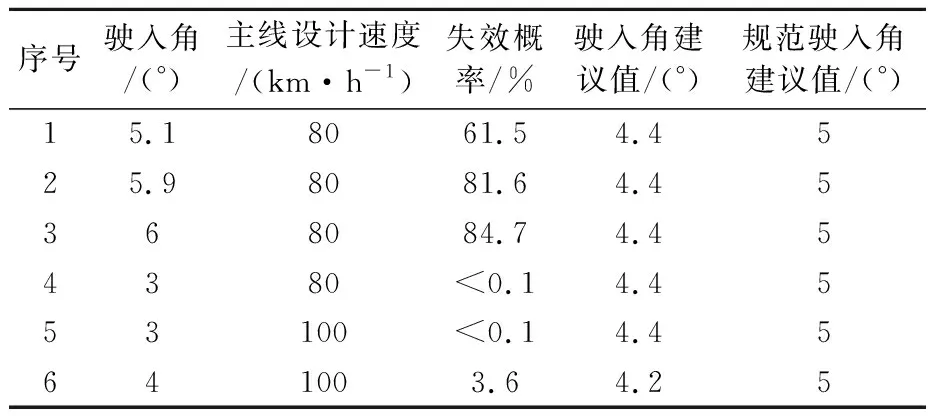
表11 車(chē)道駛?cè)虢鞘Ц怕视?jì)算結(jié)果
6 結(jié) 論
1) 結(jié)合相關(guān)研究對(duì)避險(xiǎn)車(chē)道的設(shè)置情況和主要結(jié)構(gòu)與功能進(jìn)行分析,以避險(xiǎn)車(chē)道的兩個(gè)平面設(shè)計(jì)參數(shù):駛?cè)虢呛鸵篱L(zhǎng)度作為研究對(duì)象,根據(jù)幾何約束分別確定計(jì)算模型,得出與避險(xiǎn)車(chē)道駛?cè)虢呛鸵篱L(zhǎng)度相應(yīng)的影響因素.
2) 將結(jié)構(gòu)工程可靠度理論應(yīng)用于道路設(shè)計(jì)領(lǐng)域,根據(jù)計(jì)算模型建立了駛?cè)虢呛鸵篱L(zhǎng)度的可靠度功能函數(shù).分析相關(guān)的影響變量“駛?cè)胨俣取④?chē)輛主線行車(chē)軌跡半徑、駕駛員反應(yīng)時(shí)間”的分布情況及其參數(shù),采用驗(yàn)算點(diǎn)法和蒙特卡羅法進(jìn)行可靠度求解,分析駛?cè)虢呛鸵篱L(zhǎng)度設(shè)計(jì)值的失效概率.得到高速公路三種主線設(shè)計(jì)速度120、100、80 km/h下,駛?cè)虢强煽扛怕史謩e為41.67%、42.92%和42.37%,安全可靠程度不足;引道長(zhǎng)度可靠概率分別為97.26%、98.16%和98.51%,滿足預(yù)期安全可靠程度.
3) 采用可靠性設(shè)計(jì)方法進(jìn)行避險(xiǎn)車(chē)道平面設(shè)計(jì),以高速公路路面結(jié)構(gòu)的目標(biāo)可靠度為預(yù)期安全目標(biāo),計(jì)算得到三種主線設(shè)計(jì)速度120、100、80 km/h時(shí)具有95%可靠概率的駛?cè)虢呛鸵篱L(zhǎng)度建議取值,計(jì)算結(jié)果為:主線設(shè)計(jì)速度為120 km/h的高速公路最大安全駛?cè)虢墙ㄗh值為4°,最小安全引道長(zhǎng)度建議值為65 m;主線設(shè)計(jì)速度為100 km/h的高速公路最大安全駛?cè)虢墙ㄗh值為4.2°,最小安全引道長(zhǎng)度建議值為64 m;主線設(shè)計(jì)速度為120 km/h的高速公路最大安全駛?cè)虢墙ㄗh值為4.4°,最小安全引道長(zhǎng)度建議值為63 m.
猜你喜歡
建材發(fā)展導(dǎo)向(2021年20期)2021-11-20 05:43:18
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小學(xué)閱讀指南·低年級(jí)版(2017年11期)2017-12-06 15:14:59
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國(guó)交通信息化(2016年9期)2016-06-06 07:42:10
小說(shuō)月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06