考慮車輛跟車及換道交互參數(shù)的駕駛風(fēng)格識(shí)別
2023-05-12 00:47:18柳祖鵬羅陳怡嚴(yán)運(yùn)兵
柳祖鵬 羅陳怡 嚴(yán)運(yùn)兵
(武漢科技大學(xué)汽車與交通工程學(xué)院 武漢 430065)
0 引 言
駕駛風(fēng)格指一個(gè)人選擇開車的方式或習(xí)慣性的駕駛方式[1],包括駕駛員注意力、自信的習(xí)慣性水平,對(duì)駕駛速度、行車間距的選擇等[2],受到同駕駛有關(guān)的態(tài)度和信念的影響[3],也受到駕駛員的一般需要水平和價(jià)值觀的影響[4].
Li等[5]提出采用駕駛模式轉(zhuǎn)移概率評(píng)測(cè)駕駛風(fēng)格的方法,比采用傳統(tǒng)的駕駛模式頻率方法識(shí)別準(zhǔn)確率更高.Munoz等[6]指出如果在駕駛模式轉(zhuǎn)移概率的基礎(chǔ)上加入對(duì)駕駛?cè)搜蹌?dòng)行為的分析,駕駛風(fēng)格評(píng)測(cè)效果會(huì)更好.鄧濤[7]提出通過節(jié)氣門開度、節(jié)氣門開度變化率,以及制動(dòng)減速度對(duì)駕駛風(fēng)格進(jìn)行識(shí)別.吳振昕等[8]認(rèn)為駕駛員的駕駛風(fēng)格主要反應(yīng)在車速、縱向加速度、油門踏板開合度、側(cè)向加速度、橫向角速度、航向角、轉(zhuǎn)向盤轉(zhuǎn)角及其角速度等八個(gè)方面.Langari等[9]通過平均加速度和加速度標(biāo)準(zhǔn)差與平均加速度的比值進(jìn)行駕駛風(fēng)格識(shí)別.Iván等[10]選用車輛在行程過程中的平均加速度、平均減速度,以及突然加速與制動(dòng)事件發(fā)生的總次數(shù)作為特征參數(shù)用以區(qū)分駕駛員的駕駛風(fēng)格.
上述研究大多基于車輛自身的運(yùn)動(dòng)參數(shù)特征來識(shí)別駕駛員的駕駛風(fēng)格,較少考慮不同車輛駕駛員之間的交互因素對(duì)于駕駛員風(fēng)格的影響.而駕駛員的跟馳與換道行為又受到道路中其他車輛的制約,駕駛員在其他車輛影響下采取的行動(dòng)也是駕駛風(fēng)格的一個(gè)重要反映.故本文進(jìn)行駕駛風(fēng)格識(shí)別時(shí),考慮駕駛員自身運(yùn)動(dòng)參數(shù)同時(shí),加入駕駛員的跟車時(shí)距和換道允許間距,作為車輛跟馳和換道行為中受道路中實(shí)行車輛影響的交互參數(shù),提高駕駛風(fēng)格識(shí)別指標(biāo)的全面性.
1 數(shù)據(jù)集
文中使用美國(guó)開源數(shù)據(jù)下一代仿真(the next generation simulation, NGSIM)數(shù)據(jù)集,該數(shù)據(jù)集記錄了車輛運(yùn)行過程中車輛編號(hào)、車輛類型、位置信息、車輛速度、車輛加速度、車頭時(shí)距、車頭間距,以及前后車編號(hào).
文中用NGSIM子集US101路段數(shù)據(jù)集進(jìn)行研究.US101數(shù)據(jù)集是從美國(guó)101號(hào)高速公路上采集到得到的,測(cè)量區(qū)域長(zhǎng)度為640 m,包含5條主線車道和一條集散車道,見圖1,集散車道位于Ventura Boulevard入口和Cahuenga Boulevard出口之間.共8臺(tái)同步攝像機(jī)安裝在緊鄰高速公路的一個(gè)36層樓高的頂部,記錄車輛進(jìn)出入測(cè)量區(qū)域的情況.并以0.1 s的時(shí)間間隔采集通過測(cè)量區(qū)域的車輛的時(shí)空信息,數(shù)據(jù)具有較高的精確性.

圖1 US101數(shù)據(jù)采集區(qū)域示意圖
檢測(cè)路段內(nèi)小汽車占比較多,約為總數(shù)據(jù)量的97.3%,文中將小汽車選為研究對(duì)象,只考慮小汽車的運(yùn)動(dòng)狀態(tài)參數(shù).
將下載的csv格式數(shù)據(jù)導(dǎo)入,對(duì)數(shù)據(jù)進(jìn)行初步處理,剔除摩托車和大型車數(shù)據(jù),寫入車輛橫向速度與加速度,將英制單位轉(zhuǎn)換為國(guó)際單位并提取車輛換道時(shí)長(zhǎng)及其換道時(shí)的車間間隙.完成數(shù)據(jù)的篩選之后,對(duì)滿足要求的車輛數(shù)據(jù)進(jìn)行重新編號(hào),按照相應(yīng)編號(hào)對(duì)車輛數(shù)據(jù)進(jìn)行存儲(chǔ).
2 駕駛風(fēng)格參數(shù)選擇及模糊評(píng)價(jià)
2.1 參數(shù)選擇
駕駛員的駕駛風(fēng)格同駕駛員操縱車輛的行為表現(xiàn)之間存在一定聯(lián)系[11].相應(yīng)的,駕駛員操縱車輛的行為表現(xiàn)也能反應(yīng)出駕駛員的駕駛風(fēng)格[12].基于各駕駛參數(shù)對(duì)駕駛員的影響,結(jié)合文獻(xiàn)[13-14],選擇平均車速、速度標(biāo)準(zhǔn)差、橫向加速度最大值、橫向加速度標(biāo)準(zhǔn)差、跟車時(shí)距比例作為評(píng)估駕駛員激進(jìn)程度的指標(biāo).同時(shí)考慮車輛換道參數(shù)對(duì)駕駛風(fēng)格的影響,增加換道時(shí)間及換道時(shí)目標(biāo)車道的允許間隙兩個(gè)指標(biāo)來評(píng)估駕駛員的激進(jìn)程度.
2.2 模糊矩陣構(gòu)建
在模糊集合涉及的論域U上,給定一個(gè)映射.

(1)
式中:qij為第i個(gè)評(píng)價(jià)對(duì)象關(guān)于第j個(gè)評(píng)價(jià)指標(biāo)的隸屬度.

(2)
對(duì)數(shù)據(jù)進(jìn)行模糊處理時(shí),首先確定其隸屬度函數(shù).模糊分布的論域?yàn)閷?shí)數(shù)域,一般常用的隸屬度函數(shù)為梯形和半梯形的形式,見圖2.

圖2 梯形分布
2.3 隸屬度函數(shù)確定
車輛在區(qū)域的行駛速度受交通環(huán)境影響,參考車輛限速設(shè)置,基于車輛速度分布特點(diǎn),采用半梯形分布方法確定車輛平均速度的隸屬函數(shù),參考車道限速設(shè)置,取局部區(qū)域速度值的15%和85%分位數(shù)作為隸屬度函數(shù)的分段閾值.車輛平均速度越大,表明該駕駛員相對(duì)于其他駕駛員更為激進(jìn),故選取偏大型隸屬函數(shù),其中,a=4.56 m/s,b=13.71 m/s.
車輛在一段行程中,其縱向速度標(biāo)準(zhǔn)差越大,表明駕駛員在行駛過程中駕駛狀態(tài)越不穩(wěn)定,相比較而言其行為波動(dòng)更大,激進(jìn)程度也會(huì)更大,故選取偏大型的梯形分布作為其隸屬函數(shù),其中,a=2.06 m/s,b=4.54 m/s.
橫向加速度最大值是駕駛員橫向操作的重要參數(shù),駕駛員越激進(jìn),其對(duì)于車輛的橫向行為操縱幅度越大,故選取偏大型的梯形分布作為其隸屬函數(shù).其中,a=2.33 m/s2,b=3.95 m/s2.
橫向加速度標(biāo)準(zhǔn)差表征駕駛員在車輛橫向操縱上的穩(wěn)定性,駕駛員駕駛風(fēng)格越保守,其橫向操縱行為就會(huì)越趨向于平穩(wěn),橫向加速度標(biāo)準(zhǔn)差也會(huì)越小,基于此,選取偏大型的梯形分布作為其隸屬函數(shù).其中,a=0.38 m/s2,b=0.56 m/s2.
車頭時(shí)距表征的是駕駛員在跟車過程中對(duì)于安全距離及前向碰撞風(fēng)險(xiǎn)的把握,駕駛員跟馳過程中車頭時(shí)距越小,表明其駕駛行為越危險(xiǎn),駕駛風(fēng)格也更加激進(jìn).計(jì)算駕駛員在整個(gè)測(cè)量區(qū)間中,跟車時(shí)距小于1.5 s的時(shí)長(zhǎng)占整個(gè)測(cè)量時(shí)長(zhǎng)的比例,以此比例作為駕駛員在車頭時(shí)距的評(píng)判標(biāo)準(zhǔn)下對(duì)于激進(jìn)程度的隸屬度.表1為跟車時(shí)距比例.

表1 跟車時(shí)距比例
換道時(shí)間是車輛換道行為的重要體現(xiàn),表明了車輛在換道過程持續(xù)情況,換道時(shí)間越短,表明駕駛員行為越激進(jìn),故選用偏小型梯形分布表示換道時(shí)間的隸屬函數(shù).其中,a=1.9 s,b=6.1 s.
目標(biāo)車道換道間隙為在本車換道開始前一時(shí)刻,目標(biāo)車道前后車之間的空間距離,換道間隙越小,本車同目標(biāo)車道前后車碰撞可能性越大,相對(duì)應(yīng)的駕駛員也更加激進(jìn),故選取偏小型梯形分布作為換道間隙的隸屬函數(shù).其中,a=25.98 m,b=58.61 m.
2.4 特征權(quán)重確定

(3)
根據(jù)自適應(yīng)權(quán)重算法得知,當(dāng)滿足方差最小時(shí)所對(duì)應(yīng)的最優(yōu)加權(quán)因子為
(4)
方差近似估計(jì)算法為
(5)
式中:Rii為Xi的自協(xié)方差函數(shù);Rij為Xi和Xj的互協(xié)方差函數(shù),其值可由其時(shí)間閾估計(jì)值得到.
(6)
(7)
式中:k為測(cè)量次數(shù).
基于自適應(yīng)權(quán)值估計(jì)算法得到的各特征參數(shù)的權(quán)重見表2.
2.5 駕駛風(fēng)格分類
根據(jù)式(1),計(jì)算出每個(gè)駕駛員的綜合評(píng)價(jià)指數(shù),見表3.

表3 駕駛員評(píng)價(jià)指數(shù)表
2.6 與k-means聚類方法的比較
由特征值權(quán)重的確定可以知道,本文所選參數(shù)相關(guān)性較低,近似可看作相互獨(dú)立,故不用對(duì)其進(jìn)行降維處理.基于數(shù)據(jù)邊界,對(duì)數(shù)據(jù)進(jìn)行歸一化,將數(shù)據(jù)映射到0~1,消除單位對(duì)于數(shù)據(jù)分布的影響.
k-means算法是一種基于數(shù)據(jù)點(diǎn)空間特性進(jìn)行分類的無監(jiān)督分類方法,以歐氏距離作為衡量樣本空間上聚集性的指標(biāo),將空間上聚集性相近的點(diǎn)劃分為一個(gè)類別,然后計(jì)算每個(gè)類中樣本的平均值作為新的聚類中心,進(jìn)行下一次迭代,直到聚類中心不再變化或者達(dá)到迭代次數(shù)達(dá)到上限,確定最終的分類結(jié)果.
k-means聚類完成后,其三簇的聚類中心見表4.

表4 k-means聚類中心
3 分類結(jié)果分析
依據(jù)車輛駕駛員駕駛激進(jìn)值的分布情況,以0.4和0.6為閾值劃分不同激進(jìn)程度駕駛員所屬的駕駛類別.保守型、普通型、激進(jìn)型的駕駛員實(shí)例數(shù)分別為37、83、69.k-means算法分類得到保守型、普通型、激進(jìn)型的駕駛員的實(shí)例數(shù)分別為57、75、57.兩種分類方法分類結(jié)果的一致性為40.21%.
駕駛員特性雷達(dá)圖見圖3~6.由圖3~6可知:同時(shí)存在換道與跟馳行為的車輛中,車輛的換道時(shí)間大多較為迅速.

圖3 所有駕駛員特性雷達(dá)圖

圖4 保守型駕駛員駕駛特征雷達(dá)圖

圖5 普通型駕駛員駕駛特征雷達(dá)圖
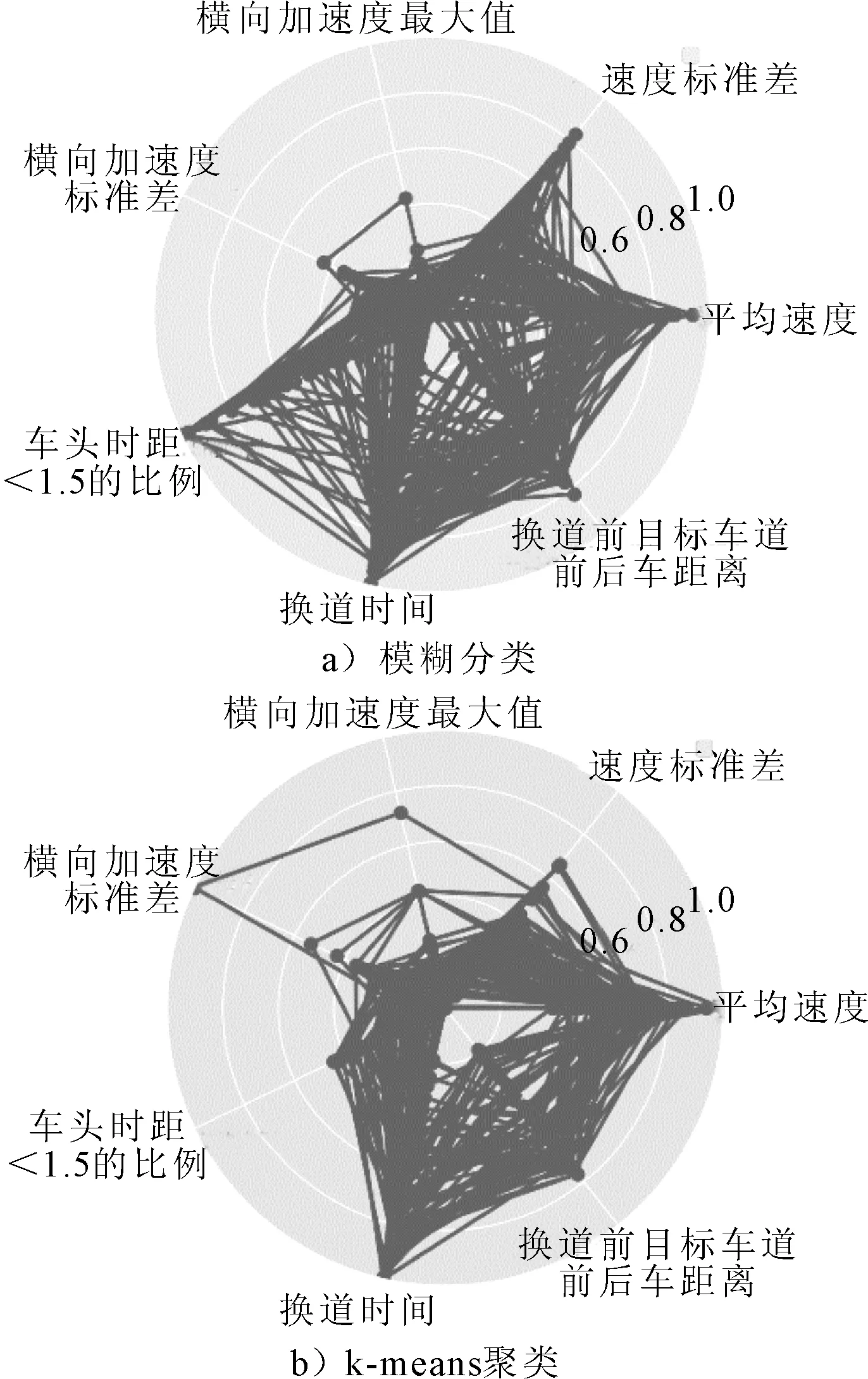
圖6 激進(jìn)型駕駛員駕駛特征雷達(dá)圖
分別采用k-means聚類和模糊數(shù)學(xué)的方法對(duì)駕駛員駕駛風(fēng)格進(jìn)行分析,對(duì)于前者的分類結(jié)果而言,保守型駕駛員的縱向速度標(biāo)準(zhǔn)差和換道時(shí)的允許換道間距在分類中存在明顯的聚集,其允許換道距離較小且縱向速度標(biāo)準(zhǔn)差較大,車輛在行駛過程中速度變化相較而言更為劇烈;普通型的駕駛員則在縱向平均速度上表現(xiàn)出聚集,由較大的平均速度;激進(jìn)型駕駛員則在車頭時(shí)距和縱向速度上表現(xiàn)出聚集,跟車時(shí)距小于1.5 s所占的行程時(shí)間較多,在跟車行為上存在更大的危險(xiǎn)性.采用模糊數(shù)學(xué)方法對(duì)車輛駕駛員進(jìn)行駕駛風(fēng)格劃分,劃分為保守型的駕駛員駕駛特征的聚集性更多的表現(xiàn)在雷達(dá)圖的右下側(cè),普通型的駕駛員比較起來,分布與保守型的駕駛員相類似,但各方面的值都要大于保守型的駕駛員,激進(jìn)型的駕駛員特征參數(shù)同其他類型的駕駛員類似,但相應(yīng)數(shù)值會(huì)更大,在整個(gè)雷達(dá)圖中所占面積也最大.
將標(biāo)準(zhǔn)化的數(shù)據(jù)還原到原始數(shù)據(jù)中,見表5,采用模糊分類的方法對(duì)駕駛員的駕駛風(fēng)格進(jìn)行識(shí)別時(shí),隨著駕駛員激進(jìn)程度的增加,駕駛員各項(xiàng)指標(biāo)值都呈現(xiàn)遞增狀況,而k-means聚類則無該規(guī)律,直觀上而言,模糊分類結(jié)果比k-means聚類結(jié)果更能體現(xiàn)駕駛員的激進(jìn)程度,更適合于車輛跟車及換道等行為的安全性評(píng)估.

表5 不同類型駕駛員類間均值
4 結(jié) 束 語(yǔ)
本文目前所用的數(shù)據(jù)集只收集了各個(gè)駕駛員較短的一段時(shí)間內(nèi)的駕駛參數(shù)特征,對(duì)于描述駕駛員的駕駛風(fēng)格而言數(shù)據(jù)時(shí)長(zhǎng)較短,只能表征駕駛員在觀測(cè)路段的風(fēng)格,對(duì)于駕駛員常態(tài)風(fēng)格的識(shí)別與分類能力還是較弱,后續(xù)研究將考慮擴(kuò)大使用的數(shù)據(jù)量,標(biāo)定駕駛員的激進(jìn)程度,用于評(píng)估駕駛員在操縱車輛中的碰撞風(fēng)險(xiǎn).
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
汽車電器(2018年1期)2018-06-05 01:22:54
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
公民與法治(2016年4期)2016-05-17 04:09:26