基于高精度軌跡數(shù)據(jù)的車(chē)輛換道行為識(shí)別研究
2023-05-12 00:47:20徐文潔
關(guān)鍵詞:駕駛員
徐文潔 趙 欣 酆 磊 陳 曦
(武漢理工大學(xué)交通與物流工程學(xué)院 武漢 430063)
0 引 言
換道與跟馳是駕駛?cè)嗽诘缆方煌ōh(huán)境中最基本的駕駛行為,隨著大數(shù)據(jù)技術(shù)應(yīng)用的興起,基于車(chē)輛出行微觀軌跡點(diǎn)數(shù)據(jù)的換道行為識(shí)別研究逐漸成為交通領(lǐng)域研究熱點(diǎn)之一.
微觀軌跡數(shù)據(jù)的采集方法有很多,如車(chē)載設(shè)備定時(shí)記錄車(chē)輛GPS軌跡坐標(biāo).康軍等[1]通過(guò)大規(guī)模的西安市出租車(chē)GPS軌跡數(shù)據(jù)挖掘城市出租車(chē)司機(jī)換道行為特征,設(shè)計(jì)了換道行為識(shí)別支持向量機(jī)模型.孫超等[2]提出了基于海量秒級(jí)GPS軌跡數(shù)據(jù)的駕駛行為評(píng)價(jià)方法,給出了超速、急變速、頻繁換道等行為的判定方法和閾值.
也有部分研究通過(guò)模擬駕駛器進(jìn)行模擬駕駛試驗(yàn)獲得車(chē)輛軌跡數(shù)據(jù),黑凱先等[3]基于車(chē)輛多自由度駕駛仿真平臺(tái),采集車(chē)輛運(yùn)行狀態(tài)參數(shù)的相關(guān)數(shù)據(jù),在不同維度的特征集和多個(gè)樣本時(shí)窗狀況下,運(yùn)用隨機(jī)森林決策樹(shù)方法連續(xù)識(shí)別駕駛員的換道行為.Dogan等[4]基于駕駛模擬試驗(yàn)數(shù)據(jù),分別構(gòu)建了前饋神經(jīng)網(wǎng)絡(luò)、遞歸神經(jīng)網(wǎng)絡(luò)和支持向量機(jī)三種換道識(shí)別模型,通過(guò)對(duì)比分析發(fā)現(xiàn)支持向量機(jī)識(shí)別效果更理想.
以上軌跡數(shù)據(jù)提取方法,基于GPS車(chē)輛定位的軌跡數(shù)據(jù)精度不足,記載時(shí)間間隔相對(duì)較長(zhǎng)造成數(shù)據(jù)離散,調(diào)用數(shù)據(jù)量大,計(jì)算和渲染軌跡時(shí)間長(zhǎng);基于模擬仿真平臺(tái)的駕駛試驗(yàn)始終處于虛擬的駕駛環(huán)境中,駕駛數(shù)據(jù)的真實(shí)性、可靠性程度無(wú)法與實(shí)車(chē)試驗(yàn)比擬.這些缺點(diǎn)導(dǎo)致得到的車(chē)輛行駛軌跡不準(zhǔn)確,無(wú)法用于精準(zhǔn)分析駕駛?cè)藫Q道行為.文中依托高精度定位技術(shù)的BDS北斗衛(wèi)星導(dǎo)航系統(tǒng),其定位精度可分為dm、cm級(jí)別,測(cè)速精度0.2 m/s,授時(shí)精度10 ns,為名副其實(shí)的車(chē)道級(jí)定位,能有效的輔助道路交通領(lǐng)域的科學(xué)研究.本次研究的數(shù)據(jù)采樣頻率選定為10 Hz.
1 換道行為識(shí)別模型
1.1 基本參數(shù)定義與計(jì)算
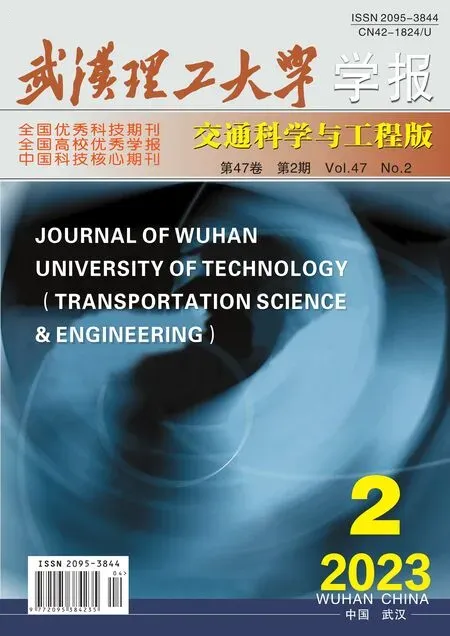
圖1為車(chē)輛行駛微觀軌跡點(diǎn)任意兩點(diǎn)之間的方位角α示意圖,以正北為起點(diǎn),順時(shí)針為正,0°≤α≤360°.
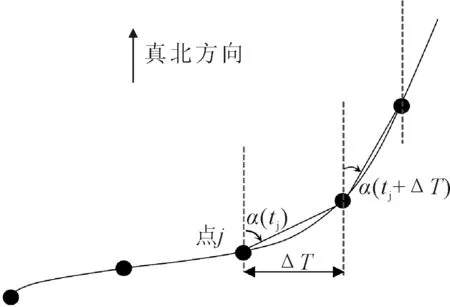
圖1 方位角示意圖
地球上任何區(qū)域任意兩點(diǎn)的普適的求方位角的方法如下[5].
已知地球球面上兩點(diǎn)A,B的經(jīng)緯度,A為當(dāng)前位置,B為目標(biāo)位置,求B點(diǎn)相對(duì)于A點(diǎn)的方位角,引入任意一點(diǎn)C:
cos (C)=cos(90°-Bw)×cos (90°-Aw)+
sin (90°-Bw)×sin (90°-Aw)×cos (Bj-Aj)
(1)
(2)
(3)
式中:Aw,Aj,Bw,Bj分別為A點(diǎn)的緯度,A點(diǎn)的經(jīng)度,B點(diǎn)的緯度,B點(diǎn)的經(jīng)度.北緯為正,南緯為負(fù);東經(jīng)為正,西經(jīng)為負(fù).
假設(shè)A點(diǎn)固定為原點(diǎn),B點(diǎn)相對(duì)于A點(diǎn)的位置在四個(gè)象限上進(jìn)行討論(本文不討論B相對(duì)于A的位置在兩個(gè)坐標(biāo)軸上),B相對(duì)A的方位角α計(jì)算公式見(jiàn)表1.
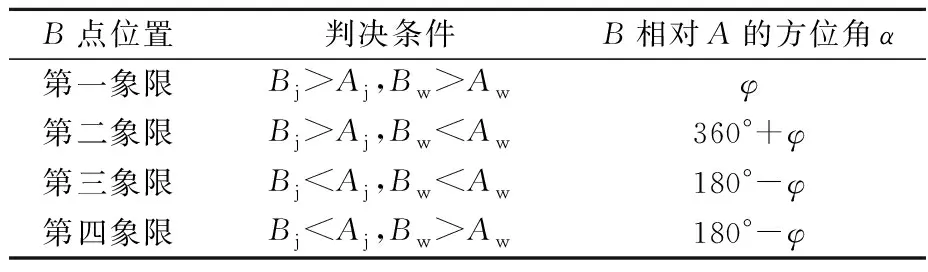
表1 方位角計(jì)算方法
每個(gè)時(shí)間粒度點(diǎn)均有角速度,這里將相鄰時(shí)間粒度點(diǎn)的方位角變化率作為其角速度,軌跡點(diǎn)j的角速度公式為
(4)
由圖1可知:ΔT為數(shù)據(jù)采集的時(shí)間粒度,即0.1 s.
地球上任意兩點(diǎn)A,B的距離為
dA,B=2arcsin[sin((Bw-Aw)/2)2+cosAw×
(5)
式中:Aw,Aj,Bw,Bj分別為A點(diǎn)的緯度,A點(diǎn)的經(jīng)度,B點(diǎn)的緯度,B點(diǎn)的經(jīng)度;R為地球半徑,6 371 km.
1.2 初始坐標(biāo)系建立
車(chē)輛在某直線路段上行駛,從路段最左截面開(kāi)始進(jìn)行軌跡點(diǎn)數(shù)據(jù)記錄,以時(shí)間為X軸,橫向位置為Y軸,以最左截面與最下車(chē)道的交點(diǎn)為原點(diǎn),建立平面坐標(biāo)系.車(chē)輛進(jìn)入路段最左截面的點(diǎn)記為截面入口點(diǎn),車(chē)輛離開(kāi)路段最右截面的點(diǎn)記為截面出口點(diǎn).圖2中α0為截面入口點(diǎn)相對(duì)于原點(diǎn)的方位角,α為任意軌跡點(diǎn)相對(duì)于原點(diǎn)的方位角.車(chē)輛行進(jìn)方向相對(duì)于大地坐標(biāo)系的正北方向可能存在圖2中的四種情形.本文主要以第一種情形為研究對(duì)象,其余情形只需改變?nèi)我廛壽E點(diǎn)與原點(diǎn)連線相對(duì)于Y軸的夾角的表達(dá)式再帶入橫向偏移距離計(jì)算公式即可.
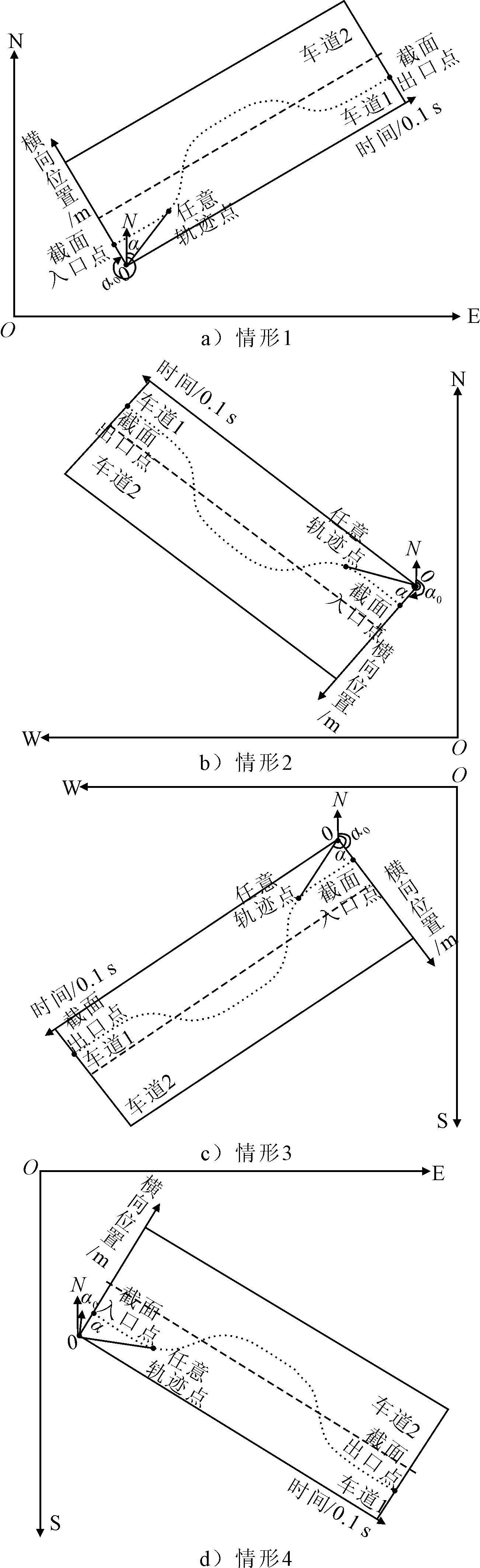
圖2 車(chē)輛四種行進(jìn)方向
1.3 車(chē)輛換道分階段
文獻(xiàn)[6]將車(chē)輛換道分為換道決策階段和換道執(zhí)行階段.將換道執(zhí)行階段定義為車(chē)輛發(fā)生單向連續(xù)橫向偏移的持續(xù)時(shí)間段.其研究中統(tǒng)計(jì)了537輛車(chē)的換道執(zhí)行階段持續(xù)時(shí)間的分布狀況,見(jiàn)表2.
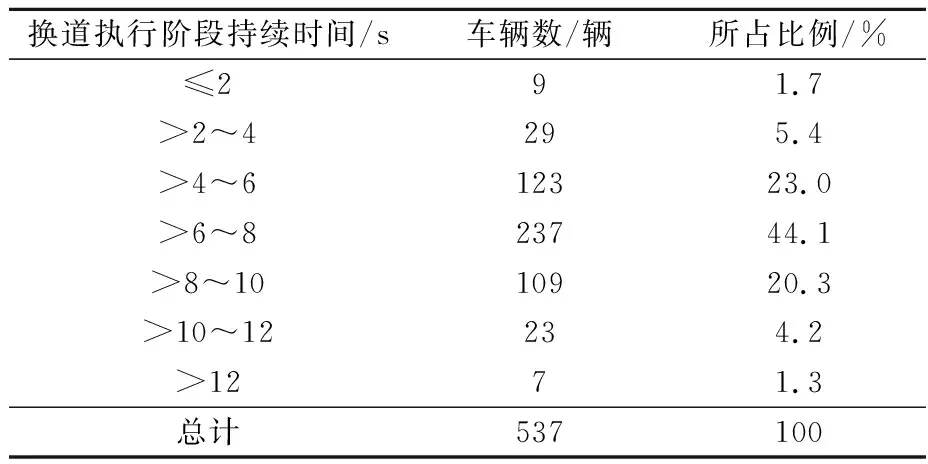
表2 換道執(zhí)行階段持續(xù)時(shí)間分布狀況
將換道執(zhí)行階段劃分為兩個(gè)子階段:換道開(kāi)始階段、換道結(jié)束階段.取置信水平為95%,換道執(zhí)行階段持續(xù)時(shí)間的置信區(qū)間取整為[2,12].
車(chē)輛換道執(zhí)行階段兩子階段的橫向位移軌跡近似S形,定義換道開(kāi)始階段軌跡點(diǎn)角速度開(kāi)始連續(xù)為正(或連續(xù)為負(fù))的第一點(diǎn)為換道開(kāi)始時(shí)刻點(diǎn)St,定義換道結(jié)束階段軌跡點(diǎn)角速度開(kāi)始連續(xù)為負(fù)(或連續(xù)為正)的最后一點(diǎn)為換道結(jié)束時(shí)刻Ft,定義車(chē)輛微觀軌跡點(diǎn)角速度為0,其左右鄰域內(nèi)軌跡點(diǎn)的角速度正負(fù)相反的時(shí)間粒度點(diǎn)為換道時(shí)刻點(diǎn)Mt,見(jiàn)圖3,換道開(kāi)始階段、換道結(jié)束階段具體表現(xiàn)為:
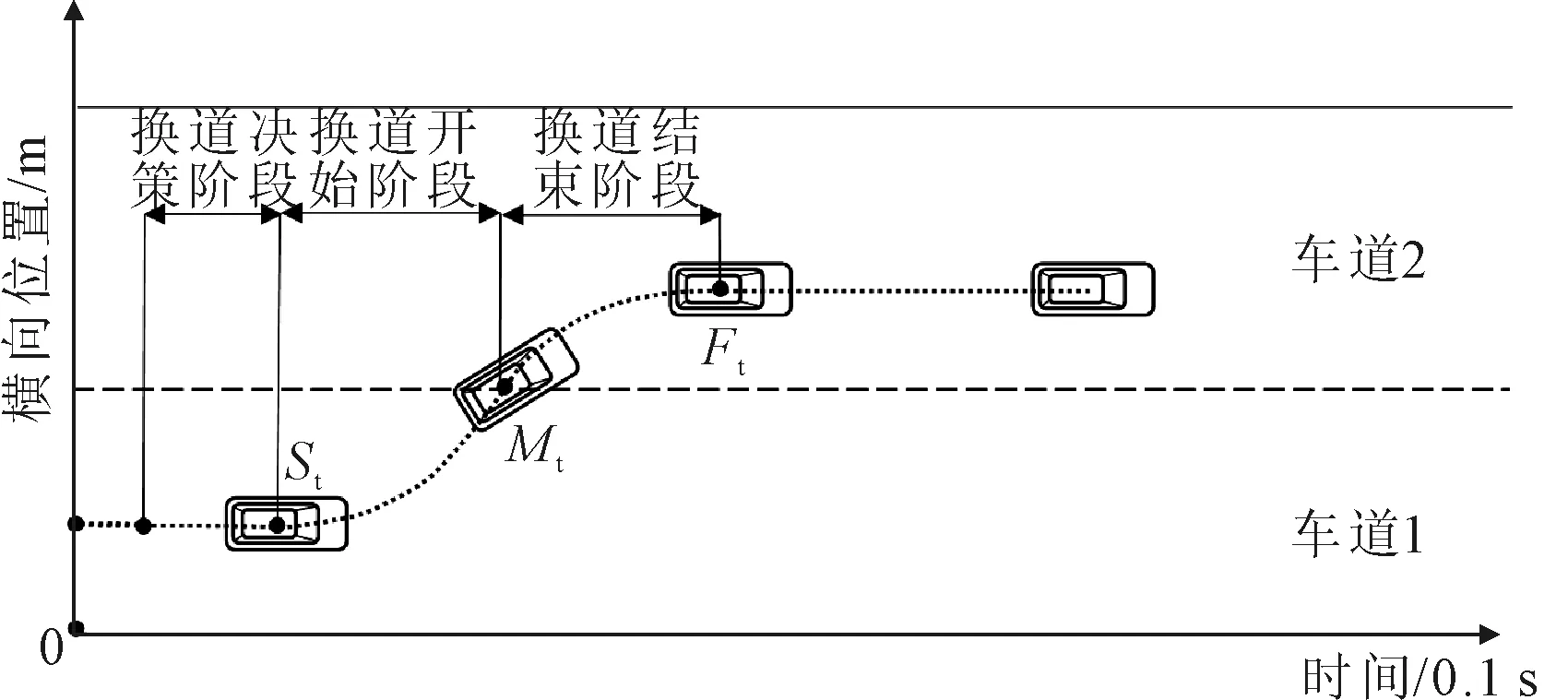
圖3 車(chē)輛換道各階段示意圖
1) 換道開(kāi)始階段 在具備換道條件后,車(chē)輛開(kāi)始執(zhí)行換道,從車(chē)輛向左(或向右)打轉(zhuǎn)向盤(pán)到微觀軌跡點(diǎn)連續(xù)橫向移動(dòng)到換道時(shí)刻點(diǎn).在這一階段,理想狀態(tài)下,車(chē)輛微觀軌跡點(diǎn)應(yīng)具有相同方向的角速度.
2) 換道結(jié)束階段 即為車(chē)輛開(kāi)始向右(或向左)回轉(zhuǎn)向盤(pán)至安全完成換道,開(kāi)始進(jìn)入跟馳前車(chē)狀態(tài).在這一階段,車(chē)輛微觀軌跡點(diǎn)繼續(xù)橫向移動(dòng)到換道結(jié)束時(shí)刻點(diǎn),車(chē)輛微觀軌跡點(diǎn)應(yīng)具有相同方向的角速度并與前一階段的角速度方向相反.
設(shè)備采集數(shù)據(jù)受駕駛員操作特性、設(shè)備本身的穩(wěn)定性等諸多因素影響,實(shí)際換道微觀軌跡點(diǎn)的數(shù)據(jù)不可避免地存在異常值和測(cè)量誤差,兩階段的角速度不可能全部為正值或全部為負(fù)值.對(duì)多次換道試驗(yàn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)對(duì)比分析得出,換道開(kāi)始階段或換道結(jié)束階段有50%以上的軌跡點(diǎn)的角速度方向一致,為正或?yàn)樨?fù),且分布較為均勻.
1.4 臨界點(diǎn)標(biāo)定
1) 換道時(shí)刻點(diǎn)Mt的標(biāo)定 換道時(shí)刻點(diǎn)Mt理論上應(yīng)為角速度為0的時(shí)刻點(diǎn)[7].由于本研究是基于工作頻率為10 Hz的定位系統(tǒng)下所得到的軌跡數(shù)據(jù),其獲取到的軌跡數(shù)據(jù)并不是連續(xù)的而是時(shí)間粒度為0.1 s的離散數(shù)據(jù),在搜索過(guò)程中可能無(wú)法找到角速度為0的點(diǎn),考慮到該點(diǎn)左右相鄰點(diǎn)角速度方向必定一正一負(fù),以其左右相鄰點(diǎn)中角速度最接近0的軌跡點(diǎn)替代該點(diǎn).利用式(4)計(jì)算每個(gè)軌跡點(diǎn)j的角速度ω(tj) ,定義:
(6)
計(jì)算各軌跡點(diǎn)的G(tj),搜索G(tj-0.1)×G(tj+0.1)=-1且|ω(tj)|≤min{|ω(tj-0.1)|,|ω(tj+0.1)|}的點(diǎn),即為換道時(shí)刻點(diǎn)的替代點(diǎn),記為jd1,jd2,…,jdN,各點(diǎn)對(duì)應(yīng)的時(shí)刻記為tjd1,tjd2,…,tjdN,將一次出行的軌跡數(shù)據(jù)分為[tjd1-6,tjd1+6],[tjd2-6,tjd2+6],…,[tjdN-6,tjdN+6]N段,作為后續(xù)研究的搜索區(qū)間.
2) 換道開(kāi)始時(shí)刻點(diǎn)St及換道結(jié)束時(shí)刻點(diǎn)Ft的標(biāo)定 換道開(kāi)始階段必須有50%以上的軌跡點(diǎn)的角速度方向一致,為正(或?yàn)樨?fù)),且分布較為均勻.在本研究中,定義了換道開(kāi)始階段最長(zhǎng)持續(xù)時(shí)間為6 s,最短持續(xù)時(shí)間為1 s.數(shù)據(jù)采集頻率為10 Hz,1 s為一個(gè)判斷時(shí)段,每秒10個(gè)微觀軌跡點(diǎn)中至少存在六個(gè)角速度為正(或?yàn)樨?fù))的軌跡點(diǎn),至多有4個(gè)角速度為負(fù)(或?yàn)檎?的軌跡點(diǎn),故1 s內(nèi)∑G(t)≥2(或∑G(t)≤-2),換道結(jié)束階段同理.按照前文確定的換道時(shí)刻點(diǎn)jd1,jd2,…,jdN及搜索區(qū)間[tjd1-6,tjd1+6],[tjd2-6,tjd2+6],…,[tjdN-6,tjdN+6],依次對(duì)各個(gè)搜索區(qū)間進(jìn)行搜索,尋找每個(gè)搜索區(qū)間的換道開(kāi)始時(shí)刻點(diǎn)St及換道結(jié)束時(shí)刻點(diǎn)Ft.
1.5 橫向偏移距離
1) 換道橫向偏移距離范圍 車(chē)輛完成一次變道產(chǎn)生的橫向偏移距離與車(chē)輛橫向安全距離相關(guān),車(chē)輛橫向安全距離表示兩車(chē)并行時(shí)的最小橫向安全間距,由車(chē)輛實(shí)時(shí)速度確定,為
dsafe(v)=a+b×vc
(7)
式中:a取0.6;b取0.06;c取0.5.
假定在交通量飽和的道路上,車(chē)輛正常行駛在車(chē)道中心位置,車(chē)道寬度為H0,車(chē)輛寬度為D,車(chē)輛到車(chē)道線的安全距離為h0,那么
2h0=dsafe(v)
(8)
可以推算得到車(chē)輛到車(chē)道線的安全距離隨車(chē)輛速度變化函數(shù):
h0(v)=0.5a+0.5b×(v)c
(9)
見(jiàn)圖4.
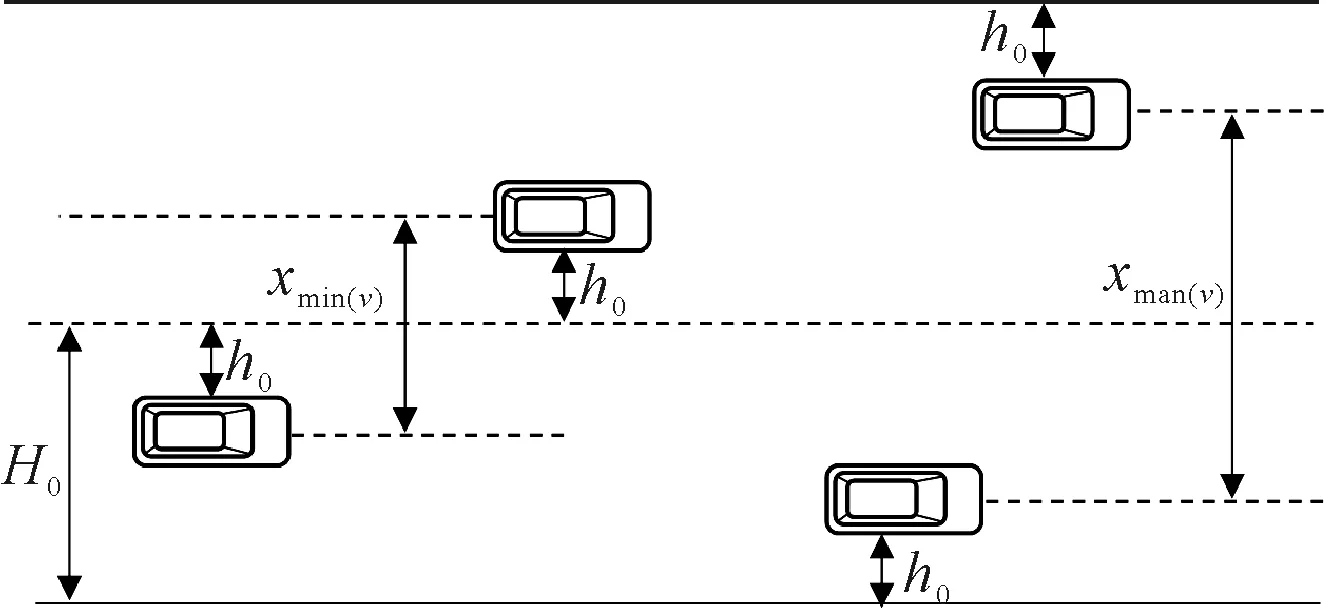
圖4 車(chē)輛換道橫向偏移范圍
車(chē)輛安全換道最大的橫向偏移距離為
xmax(v)=2H0-2h0(v)-D
(10)
車(chē)輛安全換道最小的橫向偏移距離為
xmin(v)=2h0(v)+D
(11)
2) 車(chē)輛實(shí)際橫向偏移距離 車(chē)輛截面入口點(diǎn)與原點(diǎn)連線相對(duì)于正北方向的方位角α0,換道開(kāi)始時(shí)刻最早點(diǎn)tjdn-i與原點(diǎn)連線相對(duì)于正北方向的方位角αSt及距離d0,St,換道結(jié)束時(shí)刻最晚點(diǎn)tjdn+i與原點(diǎn)連線相對(duì)于正北方向的方位角αFt及距離d0,Ft.則該段換道軌跡最大橫向偏移距離為
Xmax=|d0,Ft×cos(αFt+360°-α0)-
d0,St×cos(αSt+360°-α0)|=
|d0,Ft×cos(αFt-α0)-d0,St×cos(αSt-α0)|
(12)

(13)
見(jiàn)圖5.

圖5 車(chē)輛換道橫向偏移距離
3) 車(chē)輛換道安全橫向偏移距離X∈(xmin(v),xmax(v))與車(chē)輛實(shí)際橫向偏移距離比較,若滿足:
Xmin≥xmin(v)
Xmax≤xmax(v)
(14)
則表示該段軌跡為一次安全換道行為.
1.6 算法流程圖
在進(jìn)行臨界點(diǎn)的搜索后,可初步標(biāo)定出換道時(shí)刻點(diǎn)Mt、換道開(kāi)始時(shí)刻點(diǎn)St、換道結(jié)束時(shí)刻點(diǎn)Ft,此時(shí)仍然無(wú)法有效區(qū)分換道行為與車(chē)輛在一條車(chē)道上S形波動(dòng),因此添加1.5換道橫向偏移距離這一約束條件,最終可得到每次出行車(chē)輛發(fā)生換道行為的次數(shù)、車(chē)輛的行駛速度、每次換道持續(xù)時(shí)間范圍、每次換道橫向偏移距離范圍.算法流程圖見(jiàn)圖6.
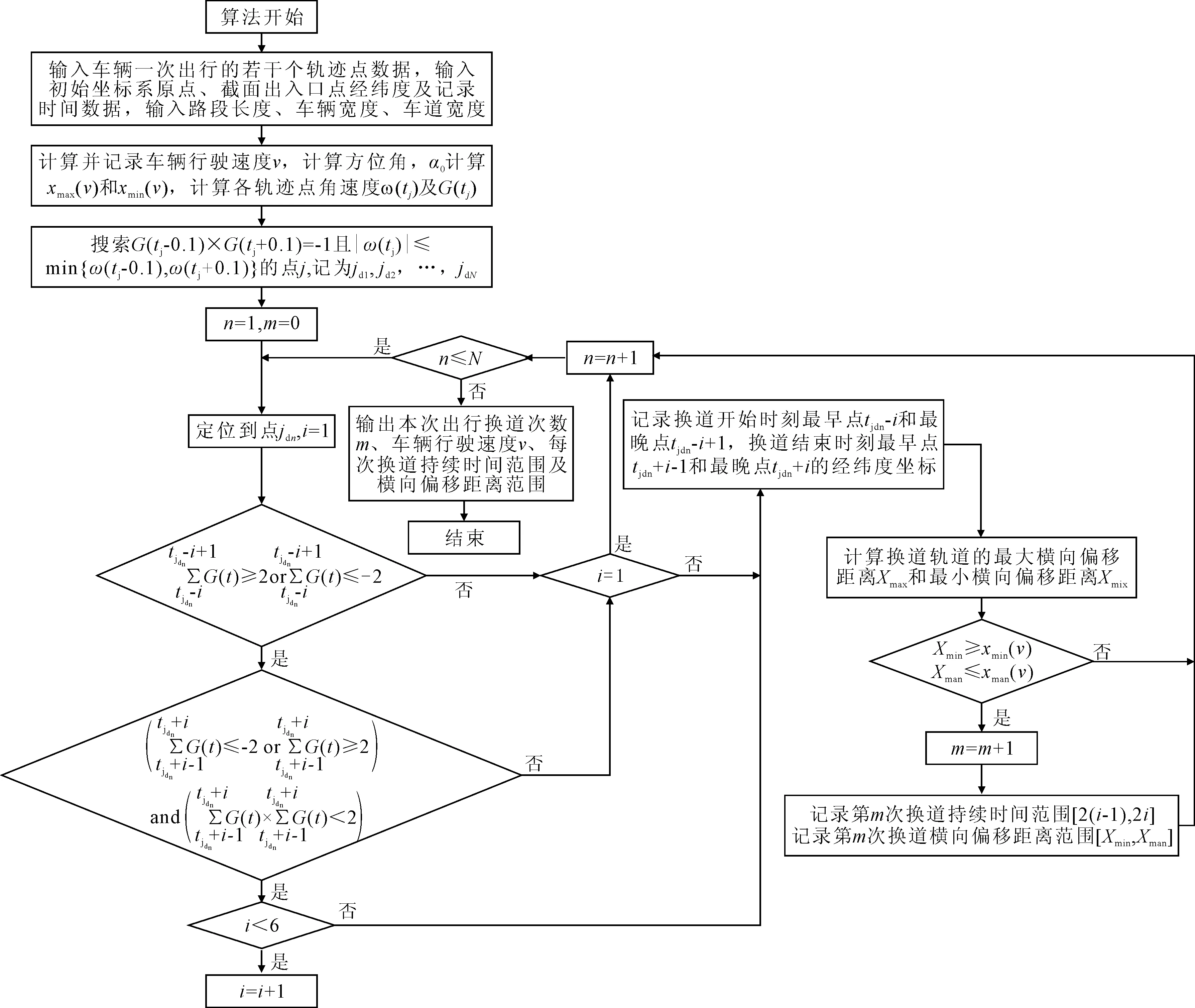
圖6 車(chē)輛換道識(shí)別算法流程圖
2 案例分析
2.1 試驗(yàn)說(shuō)明
實(shí)車(chē)試驗(yàn)地點(diǎn)為武漢市臨江大道某路段,全線為直線段,共4.8 km.選取40名駕齡各異(取整)的駕駛員,依據(jù)駕齡從小到大的順序?qū)⑵渚幪?hào)為1~40,駕駛時(shí)車(chē)載平板自動(dòng)采集高精度定位數(shù)據(jù)并實(shí)時(shí)傳送到服務(wù)器后臺(tái).
2.2 數(shù)據(jù)獲取及預(yù)處理
基礎(chǔ)數(shù)據(jù)為實(shí)測(cè)的出行軌跡點(diǎn)經(jīng)緯度坐標(biāo)數(shù)據(jù),算法運(yùn)行前,首先將原始經(jīng)緯度數(shù)據(jù)轉(zhuǎn)化為標(biāo)準(zhǔn)格式,還須對(duì)標(biāo)準(zhǔn)格式數(shù)據(jù)進(jìn)行以下幾個(gè)方面處理:①錯(cuò)誤數(shù)據(jù)處理,將超出武漢市經(jīng)緯度范圍(東經(jīng)113°41′~115°05′、北緯29°58′~31°22′)的數(shù)據(jù)判定為錯(cuò)誤數(shù)據(jù),予以剔除;②缺失數(shù)據(jù)處理,對(duì)于連續(xù)時(shí)間點(diǎn)中存在部分坐標(biāo)數(shù)據(jù)缺失的情況,利用插值法結(jié)合上下坐標(biāo)數(shù)據(jù)進(jìn)行補(bǔ)齊,當(dāng)存在大段坐標(biāo)數(shù)據(jù)缺失的情況,棄用該條出行軌跡數(shù)據(jù)[8].
2.3 試驗(yàn)結(jié)果及分析
1) 試驗(yàn)結(jié)果 將清洗后的數(shù)據(jù)輸入至換道識(shí)別模型中,模型可輸出每位駕駛員一次出行的換道次數(shù)、行駛速度、每次換道的持續(xù)時(shí)間范圍、每次換道的橫向偏移距離范圍.對(duì)模型的輸出結(jié)果進(jìn)行二次處理,統(tǒng)計(jì)出每位駕駛員在同一直線路段上一次出行的換道次數(shù)、行駛速度、平均換道持續(xù)時(shí)間、平均換道橫向偏移距離,并附上每位駕駛員的編號(hào)和駕齡,見(jiàn)表4.
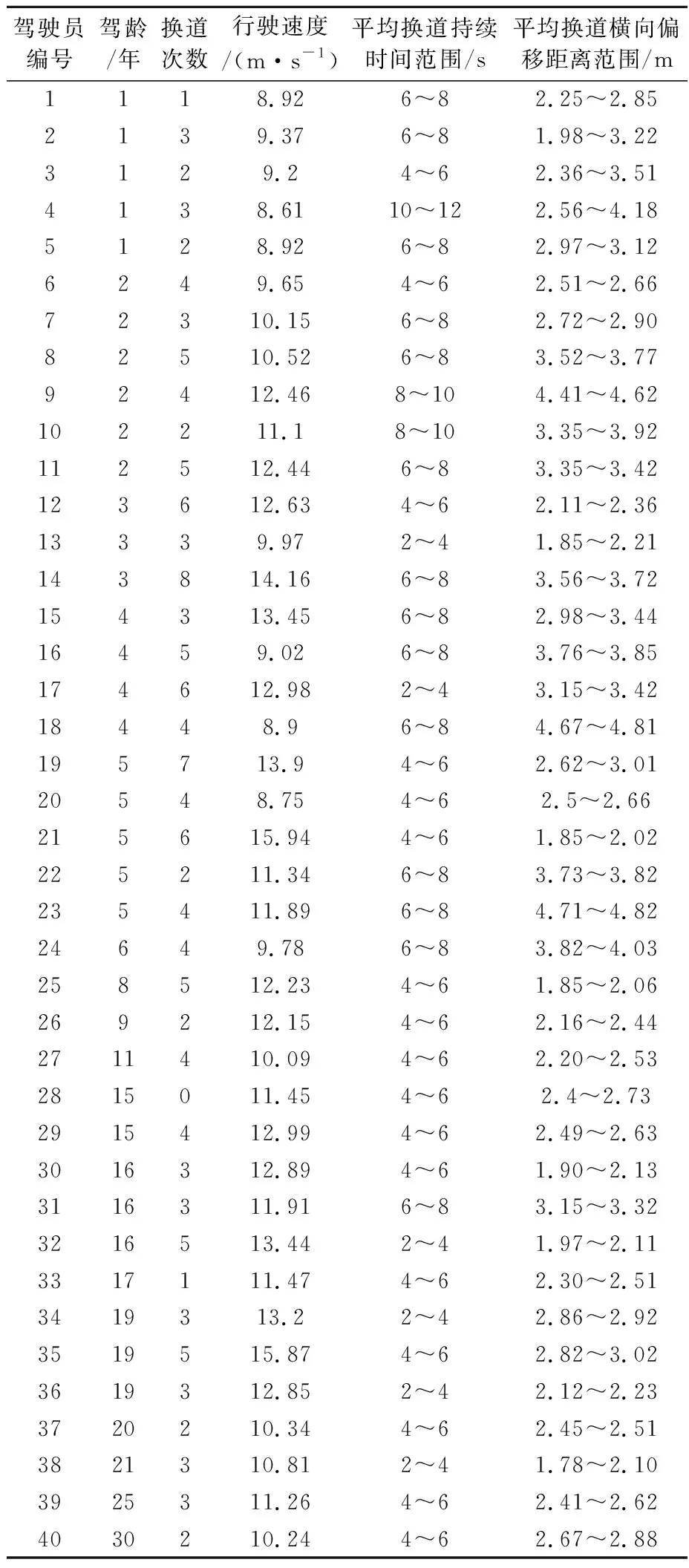
表4 換道行為識(shí)別結(jié)果統(tǒng)計(jì)表
2) 試驗(yàn)結(jié)論分析 為觀察試驗(yàn)數(shù)據(jù)分布特征規(guī)律,利用spss統(tǒng)計(jì)分析軟件進(jìn)行層次聚類分析,將駕駛員換道次數(shù)、行駛速度作為變量,將駕駛員編號(hào)作為聚類樣本,按照變量對(duì)不同編號(hào)的駕駛員進(jìn)行Q型聚類,見(jiàn)表5,將40名駕駛員分為兩組.
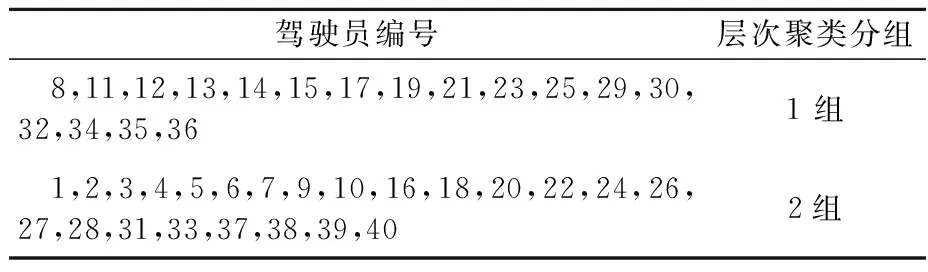
表5 層次聚類分布情況
圖7為1組、2組的駕駛員換道次數(shù)分布圖和駕駛員行駛速度分布圖.
由圖7可知:歸為1組的駕駛員的換道次數(shù)與行駛速度大部分高于平均值,歸為2組的駕駛員行駛速度與換道次數(shù)大部分低于平均值.從駕駛員編號(hào)分布上看,換道次數(shù)分布圖和行駛速度分布圖存在相似特征,即1組的分布較為居中,代表1組成員的駕齡屬于中間層,2組的分布兩側(cè)成員較集中,代表駕齡分布在低層級(jí)和高層級(jí)的成員較為集中.因此結(jié)合以上特征,進(jìn)行如下定義:將1組的駕駛員的駕駛行為定義為活躍類型,這類駕駛員有一定的駕駛經(jīng)驗(yàn),在路段上行駛時(shí)通過(guò)頻繁變換車(chē)道以提升行駛速度,因此換道次數(shù)及行駛速度都相對(duì)較高.將2組的駕駛員的駕駛行為定義為穩(wěn)重類型,這類駕駛員在路段上行車(chē)穩(wěn)重,多處于跟馳狀態(tài),主動(dòng)換道行為較少,行駛速度相對(duì)不高,多為駕駛經(jīng)驗(yàn)不足、行車(chē)謹(jǐn)慎和有多年駕駛經(jīng)驗(yàn)、操作平穩(wěn)的人群.
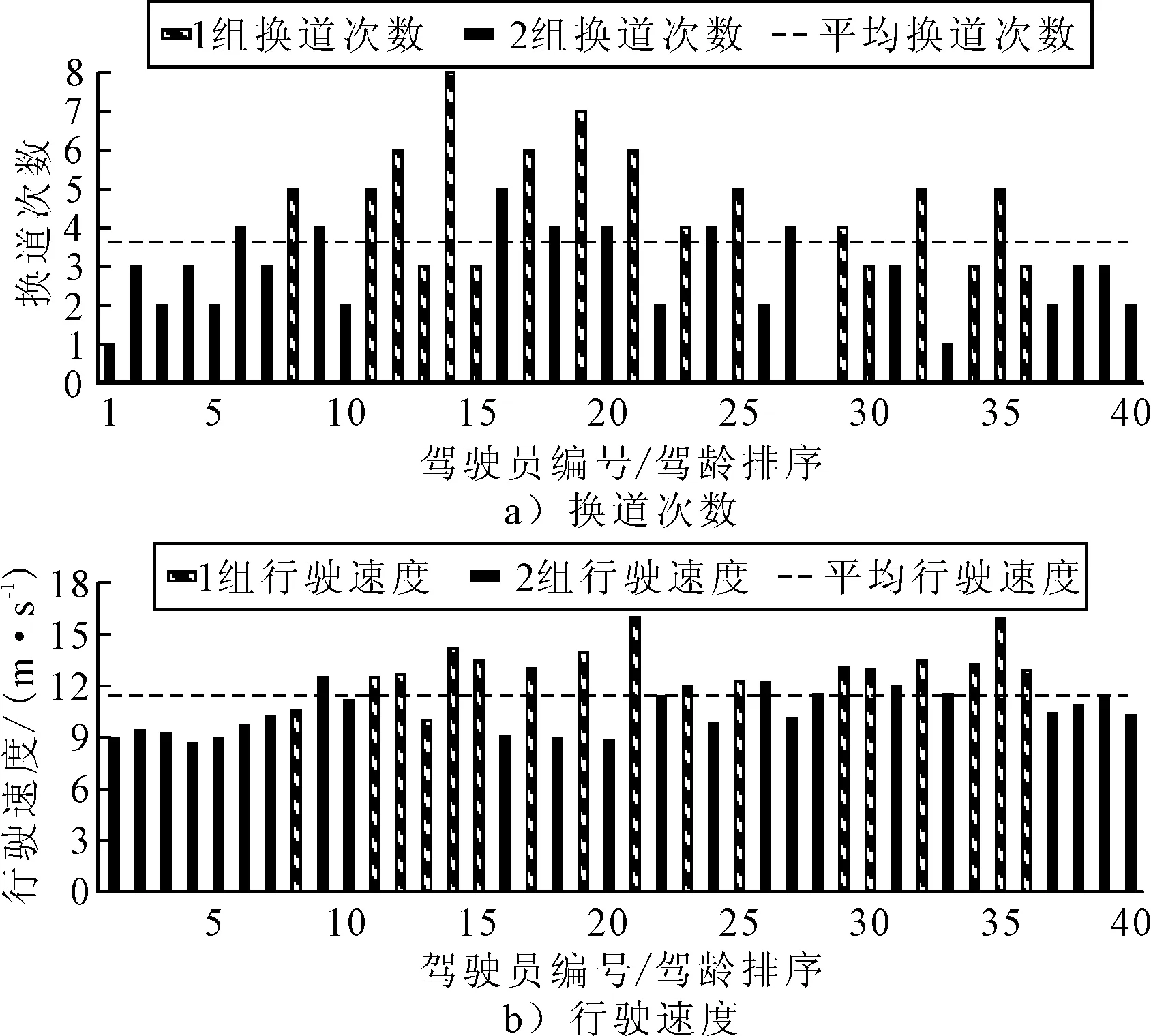
圖7 駕駛員換道次數(shù)和行駛速度分布圖
對(duì)駕駛員的平均換道持續(xù)時(shí)間進(jìn)行分析,圖8a)為40名駕駛員的平均換道持續(xù)時(shí)間分布頻率圖,由圖8a)可知:駕駛員平均換道持續(xù)時(shí)間基本處于2~12 s,其中42.5%的駕駛員平均換道持續(xù)時(shí)間為4~6 s,32.5%的駕駛員平均換道持續(xù)時(shí)間為6~8 s,該結(jié)論與參考文獻(xiàn)[6]的研究結(jié)論近似相符.圖8b)為1組和2組的駕駛員平均換道持續(xù)時(shí)間分布圖,由圖8b)可知:2組穩(wěn)重類型的駕駛員平均換道持續(xù)時(shí)間主要為4~6 s和6~8 s,占2組總數(shù)的82.6%.1組活躍類型的駕駛員平均換道持續(xù)時(shí)間分布較為分散,沒(méi)有特定規(guī)律,2~4 s快速換道的駕駛員主要為1組成員.
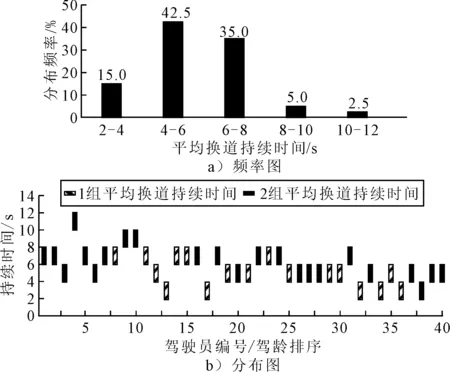
圖8 平均換道持續(xù)時(shí)間頻率和分布圖
對(duì)駕駛員的平均換道橫向偏移距離進(jìn)行分析,圖9為40名駕駛員的平均換道橫向偏移距離分布圖.
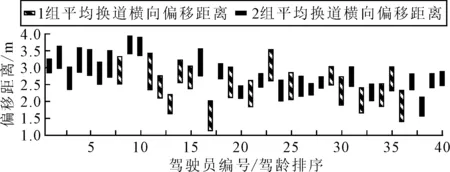
圖9 平均換道橫向偏移距離分布圖
由圖9可知:1組活躍型駕駛員平均換道橫向偏移距離區(qū)間跨度普遍較長(zhǎng),說(shuō)明該類駕駛員橫向偏移距離沒(méi)有特定分布趨勢(shì),換道時(shí)間與換道橫向位移表現(xiàn)出隨機(jī)性.2組穩(wěn)重型駕駛員平均換道橫向偏移距離區(qū)間跨度普遍較短,表現(xiàn)出明顯的個(gè)人駕駛行為習(xí)慣,換道位移趨于區(qū)間中間值,其中低駕齡的成員平均換道橫向偏移距離普遍比高駕齡的成員大.
3 結(jié) 論
1) 基于北斗高精度定位技術(shù)獲得車(chē)輛出行的若干個(gè)軌跡點(diǎn)數(shù)據(jù),構(gòu)建了換道行為識(shí)別模型,最終輸出直線路段上車(chē)輛換道次數(shù)、行駛速度、換道持續(xù)時(shí)間、換道橫向偏移距離四類數(shù)據(jù).
2) 利用spss軟件對(duì)輸出數(shù)據(jù)進(jìn)行層次聚類分析,將駕駛員換道次數(shù)、行駛速度作為變量,將駕駛員編號(hào)作為聚類樣本,按照變量對(duì)不同編號(hào)的駕駛員進(jìn)行Q型聚類,聚類算法將駕駛員分為穩(wěn)重型和活躍型兩組類別.
3) 分類別對(duì)模型輸出數(shù)據(jù)進(jìn)行分析,發(fā)現(xiàn)活躍型駕駛員換道次數(shù)較頻繁,行駛速度較快,換道時(shí)間和橫向偏移距離較為隨機(jī),快速換道多為活躍型駕駛員,該類型駕駛員多處于中間層駕齡.穩(wěn)重型駕駛員主動(dòng)換道行為較少,行駛速度相對(duì)不高,換道時(shí)間與橫向偏移距離表現(xiàn)出明顯的駕駛習(xí)慣特征,這類駕駛員平均換道持續(xù)時(shí)間主要分布在4~6 s和>6~8 s,多為低駕齡、行車(chē)謹(jǐn)慎和高駕齡、操作平穩(wěn)的人群.
4) 模型建立前期僅依據(jù)相關(guān)參考文獻(xiàn)和現(xiàn)有換道軌跡樣本數(shù)據(jù)對(duì)換道各階段的行為特征進(jìn)行總結(jié)、歸納和分析.由于樣本量有限,所得到的換道持續(xù)時(shí)間范圍、角速度相同軌跡點(diǎn)數(shù)量等閾值僅基于參考文獻(xiàn)和有限樣本的結(jié)論,其普適性可能無(wú)法保障.未來(lái)研究需進(jìn)一步擴(kuò)大樣本數(shù)量,并通過(guò)變換道路等級(jí)、試驗(yàn)車(chē)類型、終端定位精度等多重變量,開(kāi)展換道行為閾值的有關(guān)研究.
猜你喜歡
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車(chē)電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車(chē)與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50