基于北斗及藍(lán)牙的室內(nèi)外無縫連續(xù)定位系統(tǒng)設(shè)計
2023-05-14 04:36:19宋海濤劉榮斌曹國興
計算機(jī)與網(wǎng)絡(luò) 2023年6期
宋海濤 劉榮斌 曹國興
摘要:在航空物流領(lǐng)域,主要采用航空容器集裝設(shè)備及無動力裝置車輛(拖斗車)進(jìn)行貨物航空運(yùn)輸及地面流行性運(yùn)輸,其在貨站內(nèi)及機(jī)場之間進(jìn)行轉(zhuǎn)運(yùn)。在室外,可以采用衛(wèi)星定位的方式對其位置進(jìn)行監(jiān)控,但在貨站內(nèi)無法獲取其衛(wèi)星定位位置,因此設(shè)計了一種基于北斗及藍(lán)牙到達(dá)角(AOA)技術(shù)的高精度定位方式,實現(xiàn)了室內(nèi)外無縫連續(xù)定位系統(tǒng)。該系統(tǒng)的建設(shè)通過科技創(chuàng)新的技術(shù)手段提高航空貨運(yùn)物流領(lǐng)域面臨的貨物流動性無法確認(rèn)的相關(guān)難題,以室內(nèi)外位置定位為引領(lǐng),以服務(wù)于業(yè)務(wù)場景為系統(tǒng)根本,極大地提高了航空貨物運(yùn)輸領(lǐng)域的生產(chǎn)效率。
關(guān)鍵詞:室內(nèi)外定位;高精度;北斗;藍(lán)牙到達(dá)角
中圖分類號:P228文獻(xiàn)標(biāo)志碼:A文章編號:1008-1739(2023)06-48-5
0引言
目前在國際航空物流領(lǐng)域,主要采用航空容器集裝設(shè)備及相關(guān)無動力裝置車輛進(jìn)行貨物航空運(yùn)輸及地面流動性運(yùn)輸。在國際航空運(yùn)輸方面,航空容器集裝設(shè)備具備全球流動性特點,維護(hù)管理以及監(jiān)控監(jiān)管極其不易,在各航空公司之間亦有拆借情況,在管控中難免出現(xiàn)疏漏。尤其是當(dāng)國際航線航空容器集裝設(shè)備下飛機(jī)后直接被裝入卡車運(yùn)輸?shù)狡渌胤綍r,其位置更無法得到有效管控,導(dǎo)致航空容器丟失事件時常發(fā)生,因此對其位置信息的管控迫在眉睫。在地面運(yùn)輸方面,貨物通過拖斗車進(jìn)行飛機(jī)與貨站之間的轉(zhuǎn)運(yùn),貨站與室內(nèi)貨倉之間也需要進(jìn)行相關(guān)貨物的流動轉(zhuǎn)運(yùn)。相關(guān)操作人員急需了解哪些無動力設(shè)備可以使用、在什么位置、是否可以就近尋找到相關(guān)設(shè)備等信息。同時,在貨物處理上也需實時了解裝載貨物的這些航空容器及無動力裝置都放置在什么位置便于隨后開展分揀、拼裝等貨物作業(yè)。通過對航空容器及無動力裝置的位置定位,快速查找及使用相關(guān)設(shè)施,并在全流程業(yè)務(wù)系統(tǒng)基礎(chǔ)上完成貨物與容器的綁定,快速獲知貨物的位置信息,方便各運(yùn)輸環(huán)節(jié)對貨物的后續(xù)處理。
基于北斗及藍(lán)牙到達(dá)角(AOA)技術(shù)的高精度室內(nèi)外無縫連續(xù)定位系統(tǒng)通過差分定位以及藍(lán)牙AOA技術(shù)[1-3],實現(xiàn)了室內(nèi)外無縫連續(xù)亞米級的定位精度,該系統(tǒng)的建設(shè)旨在通過北斗衛(wèi)星系統(tǒng)融合藍(lán)牙AOA的室內(nèi)定位技術(shù),打造基于航空貨運(yùn)物流業(yè)務(wù)場景需求下的室內(nèi)外一體化混合定位系統(tǒng)。
1系統(tǒng)組成
系統(tǒng)由物聯(lián)全球容器管控平臺、北斗超長待機(jī)定位終端、基于藍(lán)牙AOA技術(shù)的室內(nèi)定位基站、高精度定位基準(zhǔn)站、航空容器集裝設(shè)備及無動力裝置(貨運(yùn)拖斗車)五部分組成,如圖1所示。
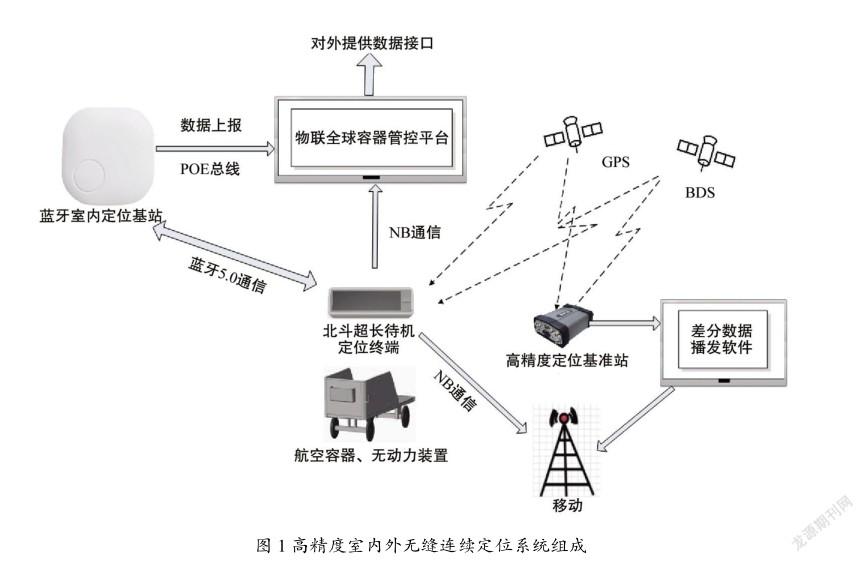
物聯(lián)全球容器管控平臺:完成終端數(shù)據(jù)接入與協(xié)議解析、數(shù)據(jù)存儲;完成室內(nèi)定位數(shù)據(jù)解析與處理;平臺通過自研室內(nèi)外定位算法,實現(xiàn)終端室內(nèi)外狀態(tài)的判斷;完成室內(nèi)外地圖整合,實現(xiàn)一張圖展示室內(nèi)外全部位置;對外提供數(shù)據(jù)接口,可對接相關(guān)機(jī)場業(yè)務(wù)流程。
北斗超長待機(jī)定位終端:通過檢測運(yùn)動、靜止?fàn)顟B(tài)觸發(fā)北斗定位功能或藍(lán)牙AOA室內(nèi)定位標(biāo)簽功能;通過NB-IOT網(wǎng)絡(luò)將位置信息數(shù)據(jù)上報應(yīng)用服務(wù)平臺。
基于藍(lán)牙AOA技術(shù)的室內(nèi)定位基站:基于信號AOA的定位算法,通過硬件設(shè)備感知發(fā)射節(jié)點信號的到達(dá)方向,計算接收節(jié)點和錨節(jié)點之間的相對方位和角度,利用三角測量法等方式計算出未知節(jié)點的位置。藍(lán)牙AOA定位基站通過POE接口將采集到終端信息發(fā)送給平臺[4]。
高精度定位基準(zhǔn)站:部署在系統(tǒng)需要室外定位的區(qū)域,用于獲取區(qū)域差分定位數(shù)據(jù),并將差分定位數(shù)據(jù)通過NB-IOT網(wǎng)絡(luò)播發(fā)給終端,使終端在室外實現(xiàn)高精度定位。
航空容器及無動力裝置(拖斗車):用于裝載機(jī)場、航空貨運(yùn)公司日常物流貨物,也是本系統(tǒng)中需要定位的設(shè)備。
2系統(tǒng)設(shè)計
2.1系統(tǒng)工作原理
航空容器及無動力裝置(拖斗車)安裝北斗超長待機(jī)定位終端。在需要定位的區(qū)域建設(shè)一套差分基準(zhǔn)站系統(tǒng),實時接收衛(wèi)星信號,計算出該區(qū)域定位信號誤差的修正數(shù),并將修正數(shù)通過NB-IOT網(wǎng)絡(luò)播發(fā)給需要室外定位的終端,終端通過定位模塊最終計算出室外高精度位置[5]。
在貨站、倉庫等室內(nèi)區(qū)域布設(shè)基于藍(lán)牙AOA技術(shù)的室內(nèi)定位基站,藍(lán)牙信號AOA技術(shù)是終端藍(lán)牙通過單一天線發(fā)射尋向信號,而作為接收端的定位基站內(nèi)建天線陣列,當(dāng)信號通過時,會因陣列中接收到的不同距離、產(chǎn)生相位差異的信號,進(jìn)而計算出相對的信號方向,定位基站通過POE總線將信號波達(dá)方向傳輸至后臺,并依據(jù)定位算法實現(xiàn)室內(nèi)位置解算。
物聯(lián)全球容器管控平臺實現(xiàn)了藍(lán)牙AOA室內(nèi)定位數(shù)據(jù)、終端定位數(shù)據(jù)及狀態(tài)信息數(shù)據(jù)接入與協(xié)議解析、數(shù)據(jù)存儲、數(shù)據(jù)處理。平臺依據(jù)室內(nèi)定位數(shù)據(jù)及終端依據(jù)加速度計等傳感器上報的運(yùn)動狀態(tài)信息等綜合判定算法,實現(xiàn)終端室內(nèi)外狀態(tài)的判斷。
北斗超長待機(jī)定位終端長期休眠,直到監(jiān)測到車輛從運(yùn)動變?yōu)殪o止后才會喚醒工作。終端喚醒后首先與平臺交互獲取室內(nèi)外狀態(tài)通知,如果車輛處于貨站等室內(nèi)時會開啟藍(lán)牙,配合室內(nèi)定位基站完成室內(nèi)定位;如果車輛處于停機(jī)坪等室外時會開啟北斗定位。終端通過NB-IOT網(wǎng)絡(luò)將相關(guān)設(shè)備信息及位置信息上報平臺,完成定位。
2.2室內(nèi)外無縫連續(xù)定位工作原理
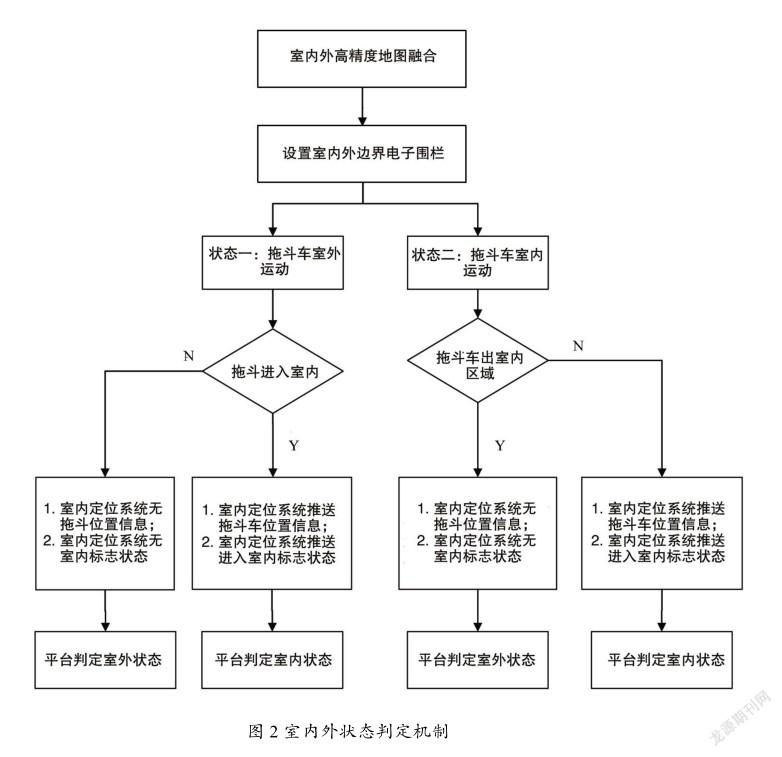
通過地圖融合方法,將室內(nèi)測繪地圖與室外高精度地圖進(jìn)行融合疊加,形成室內(nèi)外融合高精度地圖,并通過測繪方式獲取室內(nèi)疊層邊界高精度經(jīng)緯度信息。平臺通過繪制的室內(nèi)外邊界信息,劃分出室內(nèi)室外狀態(tài)標(biāo)識區(qū)域。對于判斷室內(nèi)室外的存在狀態(tài),需要依據(jù)終端目前所處區(qū)域進(jìn)行二分類狀態(tài)判定。狀態(tài)一:終端由室外向室內(nèi)移動,此時如果已經(jīng)進(jìn)入室內(nèi),則室內(nèi)定位系統(tǒng)會收到根據(jù)藍(lán)牙信號判定的室內(nèi)位置,室內(nèi)定位系統(tǒng)推送已進(jìn)入室內(nèi)標(biāo)識狀態(tài),平臺判定為室內(nèi)狀態(tài);如果此時沒有進(jìn)入室內(nèi),室內(nèi)定位系統(tǒng)無法收到藍(lán)牙信號,則判定為沒有進(jìn)入室內(nèi),無法觸發(fā)室內(nèi)標(biāo)識狀態(tài),則平臺判定為室外狀態(tài)。狀態(tài)二:終端由室內(nèi)向室外移動,如果此時終端已經(jīng)在室外,則室內(nèi)定位系統(tǒng)判定出區(qū)域標(biāo)識狀態(tài),平臺此時判定終端為室外狀態(tài);如果此時終端未出室內(nèi)區(qū)域,則室內(nèi)定位系統(tǒng)推送終端位置,觸發(fā)室內(nèi)標(biāo)識狀態(tài),平臺此時判定為室內(nèi)狀態(tài)。通過室內(nèi)定位系統(tǒng)、物聯(lián)容器管控平臺以及終端的工作機(jī)制3個關(guān)聯(lián)信息,可以判定終端目前處于室內(nèi)外的狀態(tài),從而達(dá)到室內(nèi)外無縫連續(xù)定位[6]。
室內(nèi)外狀態(tài)判定機(jī)制如圖2所示。
2.3終端設(shè)計
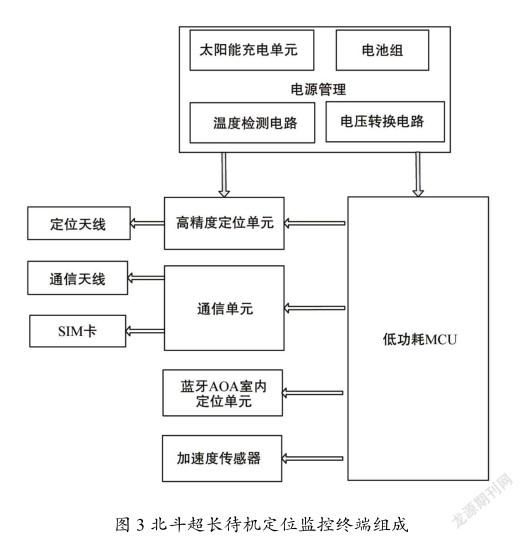
北斗超長待機(jī)定位監(jiān)控終端由通信單元、定位單元、低功耗MCU、加速度傳感器、藍(lán)牙單元和電源管理單元等部分組成。低功耗MCU在滿足功能需求的同時選用國產(chǎn)芯片。加速度計用來監(jiān)測終端運(yùn)動狀態(tài)來觸發(fā)或喚醒設(shè)備進(jìn)入/退出低功耗模式。藍(lán)牙單元用來支持藍(lán)牙AOA室內(nèi)定位。電池單元選用大容量、寬溫、高可靠性電池組滿足長周期免維護(hù)的需求,具體組成框圖如圖3所示。
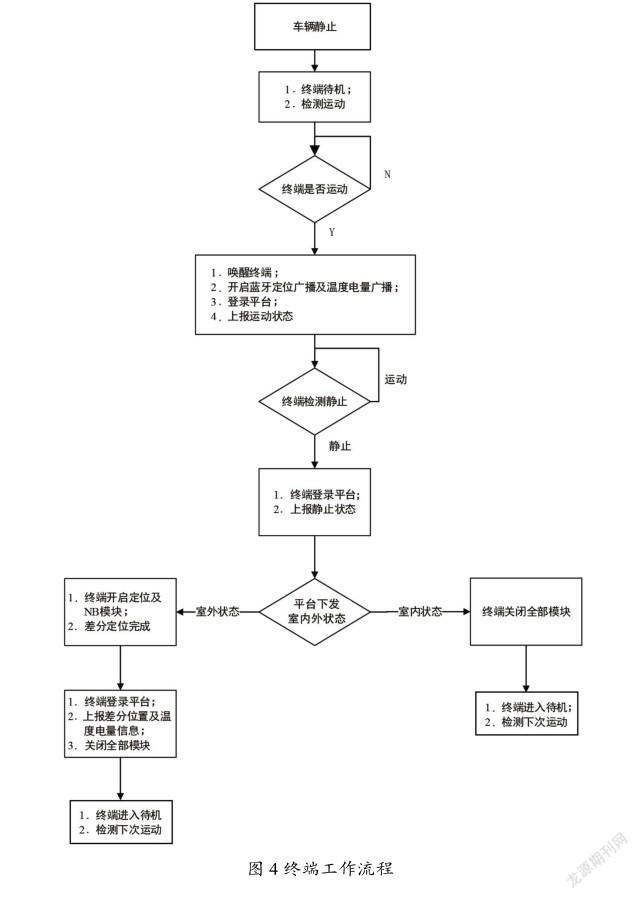
終端工作機(jī)制為:終端開始處于靜止待機(jī)狀態(tài),加速度傳感器循環(huán)檢測,當(dāng)偵測到終端處于運(yùn)動狀態(tài)后,觸發(fā)MCU中斷,MCU開啟藍(lán)牙定位廣播及溫度、電量廣播,終端開啟通信模塊,登錄到物聯(lián)容器管控平臺上,同時上報運(yùn)動狀態(tài)。上報完成后,MCU持續(xù)監(jiān)測加速度傳感器狀態(tài),如果在120 s內(nèi)無相關(guān)狀態(tài)中斷MCU,則終端登錄平臺,上報此時狀態(tài)為靜止?fàn)顟B(tài)。平臺通過室內(nèi)外狀態(tài)標(biāo)志,判斷此時為室內(nèi)狀態(tài)還是室外狀態(tài)。如果此時為室內(nèi)狀態(tài),則終端關(guān)閉全部模塊,再次進(jìn)入待機(jī)狀態(tài),室內(nèi)定位信息通過后臺解算出藍(lán)牙的具體位置,并通過經(jīng)緯度轉(zhuǎn)化,定位到相關(guān)位置;如果此時判斷為室外狀態(tài),則終端開啟定位模塊,并連接差分基準(zhǔn)站,獲取差分信息,通過定位模塊解算,獲取高精度位置信息,通過通信模塊,將定位信息及溫度、電量信息上傳到平臺。此后,MCU關(guān)閉除加速度傳感器以外的其他全部模塊,自身進(jìn)入低功耗模式,此時終端再次進(jìn)入待機(jī)狀態(tài),直至下次運(yùn)動狀態(tài)檢測,終端完成全部狀態(tài)轉(zhuǎn)換[7]。終端工作流程如圖4所示。
3系統(tǒng)應(yīng)用
本系統(tǒng)實現(xiàn)了某航空貨運(yùn)物流公司國內(nèi)貨站、國際貨站、代理倉以及機(jī)場范圍的室內(nèi)外無縫連續(xù)定位的應(yīng)用示范項目工作,主要完成了與對方系統(tǒng)的數(shù)據(jù)接入,機(jī)場地圖、國內(nèi)貨站和國際貨站室內(nèi)地圖接入,實現(xiàn)了室內(nèi)及室外地圖的融合展示,室內(nèi)外高精度位置數(shù)據(jù)接入、無動力裝置及容器信息展示、圍欄設(shè)置、容器參數(shù)設(shè)置、維修流程、保養(yǎng)流程、租賃流程等業(yè)務(wù)流程;實現(xiàn)了無動力裝置全生命周期業(yè)務(wù)流程的線上管理功能。
在國內(nèi)貨站13個冷庫、國際貨站室內(nèi)區(qū)域、代理倉、國際貨站5個冷庫完成了室內(nèi)定位基站安裝,其中藍(lán)牙AOA室內(nèi)定位基站如圖5所示。

通過安裝貨運(yùn)3 150輛拖斗車定位監(jiān)控終端,完成了貨運(yùn)差分基準(zhǔn)站建設(shè)。實現(xiàn)了貨站內(nèi)拖斗車高精度亞米級室內(nèi)外定位、拖斗車監(jiān)管以及拖斗車全業(yè)務(wù)流程管理,提高了拖斗車的管理工作,其中北斗超長待機(jī)定位監(jiān)控終端如圖6所示。
由物聯(lián)全球容器管控平臺、北斗超長待機(jī)定位終端、基于藍(lán)牙AOA技術(shù)的室內(nèi)定位基站、高精度定位基準(zhǔn)站、航空容器集裝設(shè)備及無動力裝置形成的一套完善的亞米級高精度室內(nèi)外無縫定位管理系統(tǒng),可為機(jī)場、貨運(yùn)站等提供一整套完善的無動力容器管控系統(tǒng),產(chǎn)生了良好的科技效益和社會效益。
4結(jié)束語
通過采用北斗高精度差分定位及藍(lán)牙AOA的室內(nèi)定位技術(shù),有效彌補(bǔ)了藍(lán)牙AOA定位范圍較小、北斗定位易受遮擋等不同系統(tǒng)的缺陷,實現(xiàn)了航空物流貨物等設(shè)備室內(nèi)外定位的無縫切換,并在相關(guān)貨站區(qū)域內(nèi)不受周圍環(huán)境的影響均能實現(xiàn)定位精度小于1 m。通過科技創(chuàng)新的技術(shù)手段提高航空貨運(yùn)物流領(lǐng)域面臨的貨物流動性無法確認(rèn)的相關(guān)難題,以室內(nèi)外位置定位為引領(lǐng),以服務(wù)于業(yè)務(wù)場景為系統(tǒng)根本,極大地提高了航空貨物運(yùn)輸領(lǐng)域的生產(chǎn)效率。
參考文獻(xiàn)
[1]賈靈,王薪宇,胡海,等.一種融合RSSI和AOA定位算法的智能藍(lán)牙防丟器[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2021,21(7): 63-66.
[2]陳鑫,郭杭,余敏,等.基于多重信號分類改進(jìn)算法的藍(lán)牙AOA高精度室內(nèi)定位[C]//衛(wèi)星導(dǎo)航定位技術(shù)文集(2021).鄭州:測繪出版社,2021:32-37.
[3]祁星,姌董,段萌.面向工業(yè)室內(nèi)定位的藍(lán)牙AOA與UWB混合組網(wǎng)方案[C]// 5G網(wǎng)絡(luò)創(chuàng)新研討會(2022)論文集.北京:[出版者不詳],2022:264-270.
[4]裘有斌,陳廣香,吳迪,等.藍(lán)牙AOA高精度定位技術(shù)白皮書[EB/OL].[2022-10-30]. https://www.iotku.com/News/ 542422779517992960.html.
[5]莊皓,原彬,張睿.基于北斗衛(wèi)星導(dǎo)航系統(tǒng)的差分定位技術(shù)性能分析[J].現(xiàn)代導(dǎo)航,2018,9(3):172-176.
[6]曾小江,江建華.高精度室內(nèi)外無縫定位與導(dǎo)航方法淺析[J].江西測繪,2017(3):52-53.
[7]郭凱旋,盧彥霖,馮濤,等.基于智能切換算法的室內(nèi)外無縫定位技術(shù)研究[J].傳感器與微系統(tǒng),2018,37(7):49-51.