
仿蚯蚓可攜樣探測機器人的設計
2023-05-20 13:05:34黃超雄黃嘉銳楊文杰黃春龍
中國新技術新產品 2023年4期
黃超雄 黃嘉銳 楊文杰 黃春龍 劉 鋒
(韶關學院智能工程學院,廣東 韶關 512005)
0 引言
我國礦產資源、石質文物類型眾多,目前一般采用地質雷達技術探測古墓,運用淺層地震法探測石窟巖體發育狀況以及開展窟前考古工作[1]。在土質勘測和取樣的過程中會遇到復雜多變的情況,例如空間狹小、未知有毒的環境等,大型的鉆探設備會破壞地質結構,不利于資源的二次開發。如何在盡量減小對地質結構損害的前提下完成探測及取樣工作非常重要,因此,研究用于探測及取樣的微型機器人具有重要意義[2]。
在國外,日本開發了一種用于地質勘測的小型鉆掘機器人——Digbot,該機器人采用雙重反轉鉆頭的設計,可以消除鉆土過程中的阻力矩,機器人后部采用電磁螺線管提供前進推力,但是不具備轉向功能。加利福尼亞大學研發了一種可以挖洞的軟體機器人,該機器人帶有尖端延伸噴氣裝置,可以在地下控制機器人與介質間的相互作用力,從而實現快速、可控的三維挖掘功能[3]。在國內,周晨陽[4]針對地外天體采樣設計了一種集鉆探、采樣和儲樣功能于一體的可開閉、蠕動進給的仿生鉆采機構。中科院沈陽自動化研究所研制了一種“水下自動攻泥機”[5]。哈爾濱工程大學將地下穿孔機的沖擊原理與蚯蚓的蠕動機理相結合,研制了一種頭部沖擊式拱泥機器人[6]。
螺旋類鉆探機器人轉向困難且掘進時不能及時排土,易造成泥土堵塞,從而降低掘進效率[7]。該文基于對蚯蚓外形特征、運動機理的分析研究,設計了一種能像蚯蚓一樣在土質中掘進前進的機器人,將鉆土、排土以及存土3 個功能相結合,可以在狹小空間、未知有毒環境中完成勘探、探測以及取樣工作。
1 主要結構設計及工作原理
仿蚯蚓可攜樣探測機器人共由5 個部分組成,分別是掘進裝置、轉向裝置、排土裝置、存土裝置和行走裝置,如圖1 所示。
1.1 掘進裝置
掘進裝置采用正反雙旋鉆頭,主要由切削擠壓鉆頭和切削擴孔鉆頭組成,如圖2 所示。圓周均布10 個電機,帶動圓柱齒輪三旋轉,圓柱齒輪一、三與圓柱齒輪二外嚙合,圓柱齒輪一可以將動力傳送到減速箱,減速箱通過同步帶傳送到切削擠壓鉆頭,前后鉆頭就可以朝相反的方向旋轉,大致抵消它們各自轉動產生的反向力矩,從而使機器在進行破土運動的過程中保持平穩,進而提高破土效率。切削擴孔鉆頭能在破土的過程中將一部分泥土擠壓擴散到鉆頭的周圍,另一部分落入鉆頭內部,由前面的切削擠壓鉆頭中螺旋葉片將泥土帶入機器的排土裝置中,以完成后續的排土工作和存土工作。
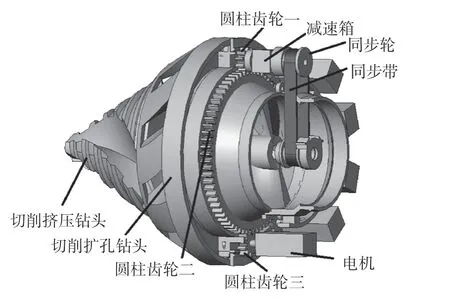
圖2 正反雙旋鉆頭結構組成
將正反雙旋鉆頭看作圓錐體,截成上、下2 個部分進行受力分析,由于切削擠壓鉆頭和切削擴孔鉆頭錐角相等,因此當圓錐體旋轉時,圓錐面上任意點與土壤接觸受到的摩擦力即為錐面任意點上切向力Fτ。為了使正、反雙旋鉆頭受到的力矩大致抵消,圓錐體上、下部分所受力矩關系應滿足公式(1)。
式中:r1為切削擠壓鉆頭的最大半徑;r2為切削擴孔鉆頭的最大半徑;r為半徑變量。
通過計算得出r1與r2的關系為。
1.2 轉向裝置
該文基于三軸承旋轉噴管結構[8]設計了全方位轉向裝置,采用內齒輪嚙合的傳動方式,用3 個動力源控制其角度,通過3 個動力源旋轉配合,從而達到控制3 個自由度轉向的目的,實現靈活轉向,其結構如圖3 所示。內齒輪一與轉彎機構一為一體,舵機一與轉彎機構二固定,當舵機一轉動時,帶動圓柱齒輪一轉動,通過內齒輪使轉動轉彎機構一轉動;內齒輪二與轉彎機構三為一體,舵機二與轉彎機構三固定,當舵機二轉動時,帶動圓柱齒輪二轉動,通過內齒輪嚙合使轉彎機構二轉動;內齒輪三與轉彎機構三為一體,舵機三與轉彎機構四固定,當舵機三轉動時,帶動圓柱齒輪三轉動,通過內齒輪嚙合使轉彎機構三轉動。

圖3 轉向裝置結構組成
如圖4(a)所示,從左往右看,以順時針旋轉為正,當舵機輸出動力使轉彎機構旋轉速度比為轉彎機構一∶轉彎機構二∶轉彎機構三 = 2 ∶-2 ∶1 時,機身向上彎曲(如圖4(b)所示),通過控制舵機輸出動力的時間控制轉彎角度,最大轉彎角度為90°。同理,當舵機輸出動力使轉彎機構旋轉速度比為轉彎機構一∶轉彎機構二∶轉彎機構三= -2∶2∶-1時,機身向下彎曲(如圖4(c)所示),最大轉彎角度為90°。在初始狀態,轉彎機構三轉動一定角度,再結合向上彎曲狀態或向下彎曲狀態,就可以朝任意方向轉彎。例如當轉彎機構三轉動45°再結合向下彎曲狀態時,舵機輸出動力使轉彎機構旋轉速度比為轉彎機構一∶轉彎機構二∶轉彎機構三 =-2 ∶2 ∶-1,向左下方狀態如圖4(d)所示。
1.3 排土裝置
排土裝置由柔性螺旋片和軟管組成,這2 個零件都是由柔性材料制成的,這樣的設計可以使機器在轉向運動的同時進行正常的排土工作,而外套軟管是為了防止泥土與機器內部其他的零件發生接觸。通過管道進行螺旋式傳送,使泥土由前往后排出。
1.4 存土裝置
存土裝置可以存儲8 種不同種類的土樣,使其在復雜環境下實現靈活取樣和攜樣的功能。
存土裝置如圖5 所示,齒輪三與方孔套筒四為一體,齒圈四與方孔套筒八為一體。圖6(a)為初始狀態,該裝置中使方孔套筒一固定,方孔套筒四與方孔套筒八的轉速比為1 ∶2,霍爾編碼電機可控制方孔套筒八每次旋轉22.5°即可將土存到方格中,如圖6(b)所示。再次旋轉22.5°即可關閉,如圖6(c)所示。
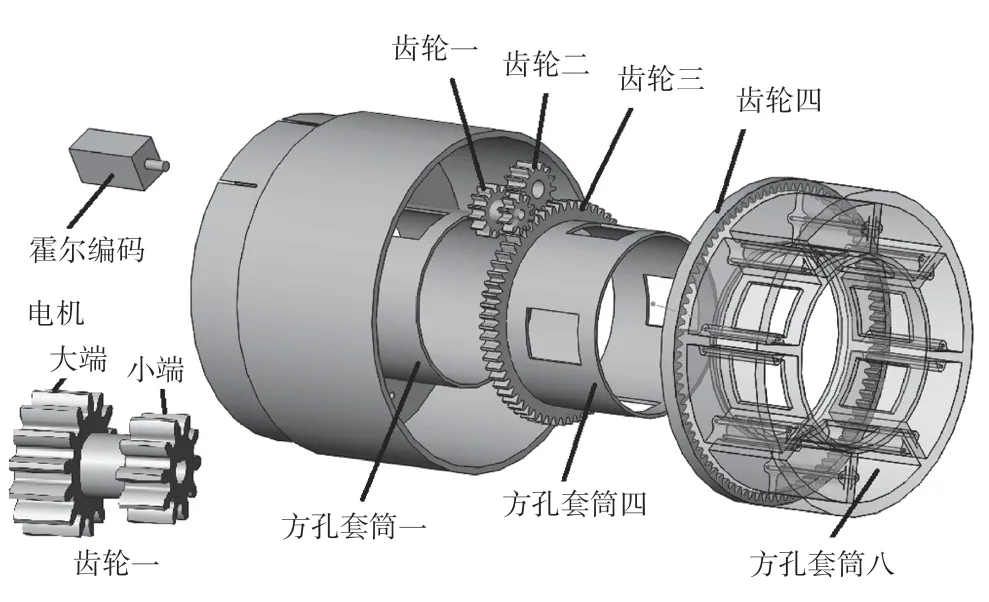
圖5 存土裝置爆炸圖

圖 6 存土裝置不同工作狀態
1.5 行走裝置
行走裝置采用四列均布履帶式結構,每條履帶的寬度為20 mm,用4 條履帶平均分布在中間的圓柱體零件中,使機器與地面的摩擦力增大,只要裝上合適力矩的電機就能帶動整機前進。
2 控制系統
為了實現靈活轉彎的功能,需要對轉向裝置中轉彎機構的旋轉速率進行控制,選擇360°舵機作為轉彎機構的動力機構。通信模塊給STM32主控板發送指令,STM32接受指令執行后給驅動模塊發送信號,以控制掘進裝置電機和行走裝置電機。運用STM32 主控板對360°電機進行輸出脈寬控制,以控制3 個舵機相互配合的轉速比為2 ∶-2:1 或-2 ∶2 ∶-1,從而實現轉彎控制的功能。而存土裝置運用帶編碼器的電機,通過編碼器產生的脈沖信號反饋給STM32 主控板處理,通過輸出PWM給電調模塊控制方孔套筒八旋轉的角度。控制原理如圖7 所示。

圖7 控制原理圖
3 結語
該文基于蚯蚓的形態和特征研制了一種仿蚯蚓可攜樣探測機器人。通過正反雙旋鉆頭掘進裝置掘土,解決了機器人掘進時機身受反扭矩的影響,提高了掘進效率。該機器人設有轉彎機構,能在轉彎的同時通過柔性的螺旋排土裝置將泥土從機器人前端向后端排出,解決了土壤堆積、 前進阻力大和轉向的問題。該機器人還設有存土裝置,可以在不同采樣位置取存8 種土樣,結合行走裝置能有效實現在土壤中勘測、取樣的功能。
