基于GMM-LSTM的車輛切入意圖識別研究
2023-05-30 02:44:24楊磊
河南科技 2023年6期
楊磊
摘 要:【目的】為了能準確識別出他車的切入意圖,同時解決由爆發性增長的無標簽行車數據所引起的識別模型落地難的問題。【方法】本研究提出一種雙層無監督的車輛切入意圖識別模型,該模型由聚類模塊及意圖識別模塊組成。聚類模塊采用高斯混合模型對基于NGSIM構造的無標簽數據集進行聚類分析,并挖掘其內在的數據關系,從而獲取切入時不同駕駛行為對應的特征標簽。意圖識別模塊用于識別車輛切入意圖,該模塊是基于LSTM搭建的。該模塊先結合聚類模塊來獲取特征標簽及無標簽數據集,構造新的有標簽訓練集及測試集,然后將其輸入到神經網絡中進行訓練與測試。【結果】該模型在基于真實路況的NGSIM數據集上表現較好,對駕駛意圖的識別準確率達到97%,精度較高。【結論】該模型在無標簽數據上具有較好的識別能力。
關鍵詞:自動駕駛;意圖識別;高斯混合模型;長短時記憶神經網絡
中圖分類號:U463? ? ? ? ? ? ? ? ? ? ? 文獻標志碼:A? ? ? ? ? ? ? ? ?文章編號:1003-5168(2023)06-0028-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.06.005
Research on Vehicle Entry Intent Recognition Based on GMM-LSTM
YANG Lei
(School of Mechatronics and Vehicle Engineering, Chongqing Jiaotong University,Chongqing 400074,China)
Abstract: [Purposes] In order to accurately identify the cut-in intention of other vehicles and solve the problem of difficult implementing of identification model caused by the explosive growth of unlabeled driving data. [Methods] This study proposes a two-layer unsupervised vehicle cut-in intention recognition model, which consists of a clustering module and an intention recognition module. The clustering module uses the Gaussian mixture model to cluster the unlabeled data set based on NGSIM, and excavates its internal data relationship to obtain the feature labels corresponding to different driving behaviors. The intention recognition module is used to identify the vehicle entry intention, which is based on LSTM. The module first combines the clustering module to obtain feature labels and unlabeled data sets, constructs new labeled training sets and test sets, and then inputs them into the neural network for training and testing. [Findings] The model performed well on the NGSIM dataset based on real road conditions, and the recognition accuracy of driving intention reached 97 %. [Conclusions] The model has good recognition ability on unlabeled data.
Keywords: automatic drive; intent identification; Gaussian mixture models; LSTM
0 引言
他車切入是一種常見的駕駛行為,其對自車的行駛狀態會產生影響,尤其是在人機混駕的場景中,自動駕駛汽車能否精準高效地識別出他車的切入意圖,是自動駕駛汽車能否實現安全行駛的關鍵,也是當前自動駕駛汽車研究的熱點之一[1]。
目前,國內外對駕駛意圖的識別可大致分為兩類。第一類是通過建立運動學或動力學模型來對車輛的駕駛意圖進行識別[2-4]。該類模型對短時駕駛意圖的識別有較高的準確率,而車輛運動是復雜的非線性過程,高度簡化的運動學或動力學模型在識別長時駕駛意圖時,其準確率較低,精度較差。第二類是基于數據驅動的駕駛意圖識別,通常采用機器學習或深度學習算法來識別駕駛意圖。劉興亮等[5]提出一種基于支持向量機的駕駛意圖識別模型,其在高速公路場景中對目標車輛駕駛意圖識別的準確率較高。劉志強等[6]提出一種基于馬爾科夫及支持向量機的雙層識別模型,在相同場景中,其識別的準確率要優于單層模型。張海倫等[7]提出一種基于雙層連續隱馬爾可夫模型及貝葉斯分類器的識別模型,能在他車切入的前期階段準確識別出其駕駛意圖。上述的傳統機器學習模型因其具有較高的準確率、較好的實時性,從而得到研究者的廣泛關注,但傳統的機器學習模型同樣存在高維度場景表現不佳、時序捕捉能力較差、訓練參數難以確定等問題。為了解決上述問題,研究者將目光投向基于神經網絡的深度學習模型,如長短時記憶神經網絡(LSTM)等。
車輛行駛是一連串行為的集合,通常表現為與時間相關的數據序列,而長短時記憶神經網絡能很好地捕捉該類型數據內部之間的復雜特征關系,能精確提取出連續駕駛行為的時間關系。因此,其在對他車駕駛意圖識別領域中得到較為廣泛的應用。季學武等[8]、梁凡[9]、閆偉等[10]使用長短時記憶神經網絡來識別其他車輛的駕駛意圖,在不同場景和條件下,對他車駕駛意圖有較高的識別準確率。同時,考慮到人工標注的困難及對數據錯標帶來的誤差,以聚類算法為代表的無監督學習方法在駕駛意圖識別中的應用得到重視[11-13]。因此,本研究結合無監督學習的高斯混合模型(GMM)及長短記憶神經網絡(LSTM),建立一種基于NGSIM數據集的無監督駕駛意圖識模型,從而實現快速高效地識別出他車的切入意圖。
1 數據預處理及參數提取
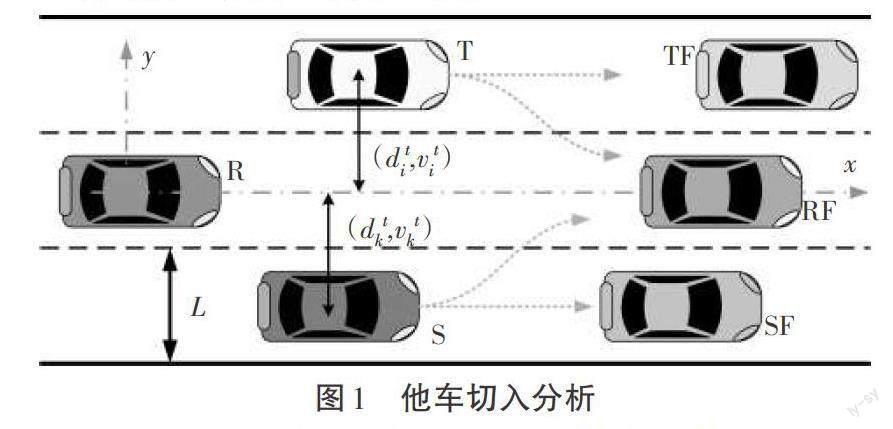
車輛在直線道路上行駛時,通常有車道保持和車輛切入兩類行為,如圖1所示。在圖1中,R為自車,T為自車的左前車,S為自車的右前車。當車輛正常直線行駛時,其橫向運動只會發生較小的變化,沒有太大的行為波動。而在車輛切入他道的過程中,其橫向運動會出現較為明顯的變化趨勢。因此,為了區分車輛行為是直線行駛、左切入、右切入這三種行為的哪一種,用其橫向上的運動變化趨勢進行表征,可用其橫向運動變化的相關物理量的波動來表示駕駛行為的變化。
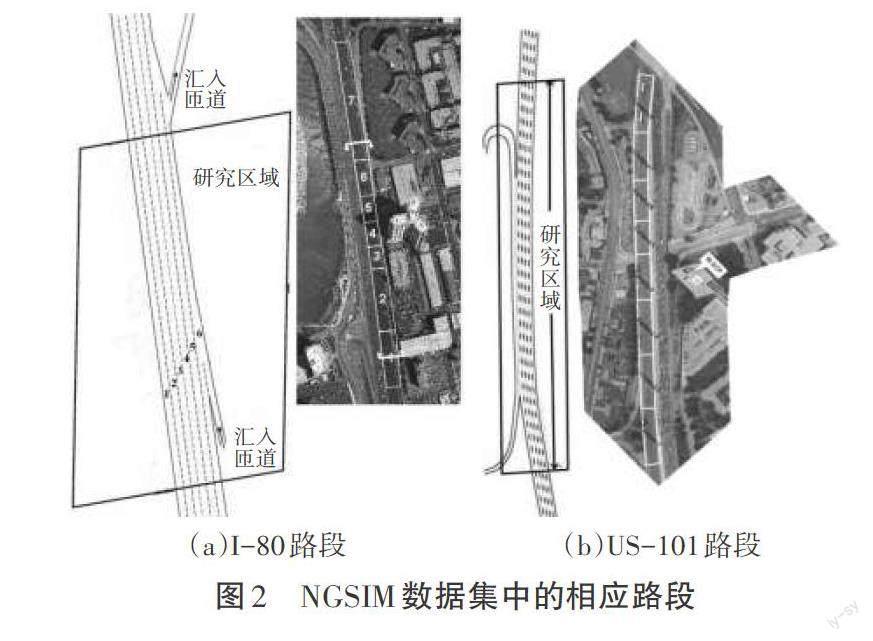
車輛的切入意圖是一連串駕駛行為的集合。一次完整的切入意圖是由大量的軌跡數據點構成的,而選擇合理的數據點特征決定了模型的準確率。考慮到橫向物理量的多樣性,本研究選擇具有特征變化明顯的側向速度和側向位移作為對應軌跡點的特征參數。因此,先從NGSIM數據集中提取以這兩種參數為特征參數構成的軌跡簇。NGSIM數據集是由美國FHWA搜集的高速公路行車數據,包含US101、I-80等道路上的所有車輛在一個時間段內的車輛行駛狀況,其對應的路段如圖2所示。
由于該數據集包含的數據量龐大、參數較多,因此要對數據進行預處理。先從數據集中的單條換道軌跡中提取出一條完整軌跡,由于一次完整的車輛切入行為通常是在5 s內完成的,因此提取目標為車輛在20 s內的完整行駛軌跡,然后利用滑動時窗將行駛軌跡切分成以5 s為基本單位的行為序列集合。
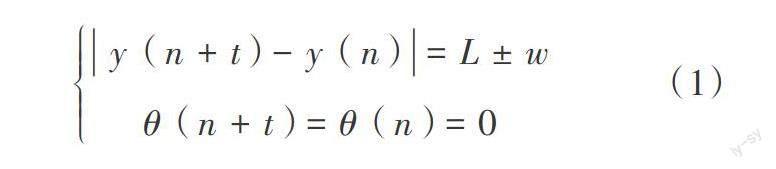
對數據集中的單條切入軌跡,要提取切入起始點及該時刻對應的特征參數。為了避免車輛橫向位移的細微變化對切入起始點的干擾,以側向位移和行駛軌跡的曲率作為車輛是否切入的判斷標準。對單次完整的切入過程,其切入的起點、終點處的橫向位移和軌跡曲率的計算見式(1)。
式中:y(n)為車輛切入起點處的橫向位置;y(n+t)為車輛切入終點處的橫向位置,二者之差即為車輛在切入過程中的側向位移,結合真實的切入過程,本研究以側向位移等于車道寬作為切入結束的衡量標準之一;t為切入時間;L為車道寬度,在NGSIM數據集中,車道寬為3.75 m;w為補償值,考慮到測量誤差等多種因素的影響,可能出現軌跡曲率皆為0的情況,側向位移偏離車道寬的情況,進而影響數據的抓取,此時要對側向位移進行補償;θ(n)為車輛位于切入起點時車輛的行駛軌跡曲率;θ(n+t)為車輛位于切入終點時車輛的行駛軌跡曲率。當起點與終點的行駛軌跡曲率相等時,可認為車輛停止切入,并進入目標車道,開始直線行駛,二者是否都為0也是切入結束與否的衡量標準之一。
通過公式(1)可限制切入過程中起始點、終止點處的橫向位移和軌跡曲率,并根據限制對軌跡數據進行分類,左右切入序列的始末位置是根據橫向坐標來確定的。本研究從NGSIM數據集中共提取到左切入軌跡101條、右切入軌跡288條、直線行駛軌跡437條。
在獲取到行駛軌跡簇后,考慮到數據樣本序列過長會導致模型的訓練難度加大,因此要對20 s的完整行駛軌跡進行切分,最終完成數據集的構建,并按7:3的比例將數據集劃分成訓練集及測試集,從而完成數據集的構建準備工作,并開始下一步的模型搭建工作。
2 切入意圖識別模型
2.1 高斯混合模型的搭建
高斯混合模型是一種無監督的聚類模型,其能很好地捕捉到數據隱藏的關聯性,可將無標簽的數據根據其內在的相互關聯特征劃分為不同的類別簇。
由于行駛軌跡是由連續的軌跡點構成的,因此高斯混合模型聚類的對象是行駛軌跡中的一系列軌跡點。在聚類前,先對數據集中的相關軌跡點進行可視化處理,如圖3所示。
由圖3可知,三種行駛軌跡存在軌跡點重疊的情況。采用高斯混合模型,一方面是為了給無監督數據添加標簽,另一方面也是為了識別這些重疊的軌跡點屬于哪種行駛狀態,從而降低人工標注的成本,提高數據的準確率。
在使用高斯混合模型對數據進行聚類前,先要選取高斯混合模型對應的k值數,即高斯模型的個數,k的取值將直接影響最終的聚類效果。為了保證模型的精確性,本研究采用貝葉斯信息準則來確定k值的大小。
貝葉斯信息準則是統計學中常用的模型選擇方法,其能在有限的階數范圍內找出相對最優的擬合模型,貝葉斯信息判據值隨高斯混合數目的變化情況如圖4所示。由圖4可知,當k=3或4時,高斯混合模型的貝葉斯信息判據值處于兩個較為明顯的區分范圍。所以,本研究GMM的模型數初步選擇為3或4,而具體的模型選取數要根據實際的識別效果來確定。
先選取k=3,對數據進行聚類,效果如圖5所示。
由圖5可知,當k=3時,高斯混合模型能很好地將軌跡點聚類到各個數據簇中,聚類結果能很好地符合對數據集中三種行駛軌跡數據特性的認知。因此,本研究選取k=3作為高斯混合模型中高斯模型的個數,其對應的聚類結果作為下一步識別模型的標簽與數據集,一起輸入到有監督學習的LSTM模型中,從而實現對切入意圖的識別。
2.2 LSTM參數的選取及訓練
LSTM是一種處理時序數據的神經網絡,其能很好地捕捉數據在時間上的內在關系,因此其在以時序數據為主的行駛軌跡數據中具有較好的特征捕捉能力,可用來識別他車的切入意圖,常見的LSTM模型如圖6所示。
在圖6中,xt為t時刻輸入模型的數據向量。LSTM模型在接收到該數據后,結合上一時刻的細胞狀態Ct-1及上一時刻的輸出ht-1,對神經網絡參數進行更新,然后輸出當前時刻的細胞狀態Ct及當前網絡的輸出ht,該輸出通過激活函數可計算得到與xt對應的輸出yt。而Ct、ht下一刻的輸入xt+1將被輸入到模型中,從而獲取下一時刻的參數,以此類推,循環計算,從而完成對時序關系的捕捉。
在本研究所采用的LSTM網絡包含隱藏層、輸入層、輸出層,隱藏層單元數設置為100,丟失率設置為0.5,最大迭代次數為50,每次樣本輸入50批數據,初始學習率設置為0.01。部分訓練過程如圖7所示。
由圖7可知,LSTM模型在訓練過程中的損失率在3%左右,準確率維持在97%上下,這說明LSTM模型在該訓練集上的表現較好。而為了驗證LSTM模型能否對未見過的數據進行識別,可用訓練好的模型去識別測試集中的數據,識別結果的混淆矩陣如圖8所示。
由圖8可知,LSTM模型在測試集上的性能也較為優異,在識別左切入(標簽1)時,能準確辨識出1 154組數據,準確率達96.0%。在識別右切入(標簽2)時,能準確辨識出1 450組數據,準確率達97.1%。在識別直線行駛(標簽3)時,能準確辨識出3 714組數據,準確率達98.1%。在對測試集數據進行識別時,能準確識別出6 318組數據(總數組為6 480組),總體識別準確率為97.5%。這說明該模型的總體表現符合本研究的預期。
3 結論
為了能準確認別他車切入意圖,本研究提出高斯混合與長短時神經網絡的雙層模型,其在基于真實路況的NGSIM數據集上具有較為優秀的表現,模型識別的準確率較高,能有效識別出他車的切入意圖,為自動駕駛汽車的行為決策提供參考。
參考文獻:
[1]WANG X S,YANG M M.Cut-in behavior analyses based on naturalistic driving data[J].Journal of Tongji University(Natural ence),2018(8):1057-1063.
[2]WISSING C,NATTERMANN T,GLANDER K H,et al.Lane change prediction by combining movement and situation based probabilities[J].Ifac Papersonline,2017(1):3554-3559.
[3]XIAO W,ZHANG L J,MENG D J.Vehicle Trajectory prediction based on motion model and maneuver model fusion with interactive multiple models[J].SAE International Journal of Advances and Current Practices in Mobility,2020(6):3060-3071.
[4]沈航先.車輛換道意圖識別和軌跡預測模型研究[D].哈爾濱:東北林業大學,2021.
[5]劉興亮,朱西產,李霖,等.基于支持向量機的駕駛意圖識別[C]//Infats Proceedings of the 12th International Forum of Automotive Traffic Safety,2015:157-163.
[6]劉志強,吳雪剛,倪捷,等.基于HMM和SVM級聯算法的駕駛意圖識別[J].汽車工程,2018(7):858-864.
[7]張海倫,付銳.高速場景相鄰前車駕駛行為識別及意圖預測[J].交通運輸系統工程與信息,2020(1):40-46.
[8]季學武, 費聰, 何祥坤,等.基于LSTM網絡的駕駛意圖識別及車輛軌跡預測[J].中國公路學報, 2019(6):34-42.
[9]梁凡.基于LSTM網絡的自動駕駛意圖識別研究[D].烏魯木齊:新疆大學,2020.
[10]閆偉,胥凌志,李嘉頎,等.基于大數據的汽車駕駛員駕駛意圖識別分析[J].農業裝備與車輛工程,2022(8):1-5.
[11]嚴利鑫,賀宜,糜子越,等.考慮生理特性的駕駛行為險態辨識研究[J].交通信息與安全,2019(3):12-19,27.
[12]劉思源,喻偉,劉潔瑩,等.考慮駕駛風格的車輛換道行為及預測模型[J].長沙理工大學學報(自然科學版),2019(1):28-35.
[13]李儲巖.基于K-means算法的駕駛行為分析研究[D].哈爾濱:哈爾濱工程大學,2020.
