某純電動全地形車動力系統的參數優化設計與仿真
2023-05-31 01:58:20李崧
汽車零部件 2023年5期
李崧
江蘇林海動力機械集團有限公司,江蘇泰州 225300
0 引言
全地形車是一種主要用于休閑娛樂和日常實用的動力運動裝備,其主要銷售市場在北美和歐洲。隨著歐美國家對環保要求的不斷提高,在全球推崇碳中和和電動化的大趨勢下,純電動全地形車有望成為未來發展的新趨勢。
純電動全地形車的動力性和經濟性反映了動力系統的設計水平,是消費者、競爭對手和企業自身都關注的需求,也是體現競爭力的需求,而滿足這些需求的關鍵在于純電動全地形車動力系統參數的合理設計。
本文根據性能指標并通過理論計算確定了某純電動全地形車電機參數和傳動系統傳動比的范圍[1]。由于同樣功率的電機具有不同的驅動特性,通過仿真分析優化傳動系統的傳動比,滿足了該純電動全地形車的動力性和經濟性要求。
1 基本參數及性能目標
某純電動全地形車的整車基本參數見表1,整車性能目標見表2。

表1 整車基本參數
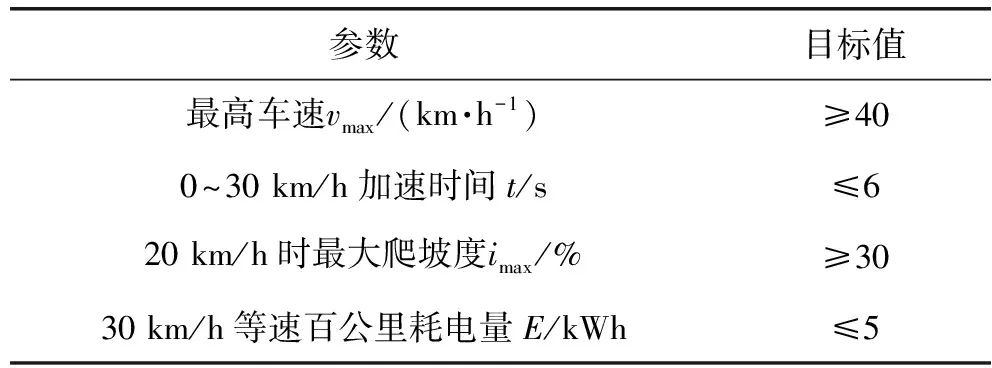
表2 整車性能目標
2 動力系統參數設計
2.1 電機參數設計
電機參數的設計需滿足最高車速、加速性能和爬坡性能指標的要求[2]。
純電動全地形車最高車速要求所消耗的電功率為
(1)
式中:Pv為最高車速行駛時消耗的功率,kW;ηt為傳動系統效率;M為滿載質量,kg;g為重力加速度,m/s2;f為滾動阻力系數;vmax為最高車速,km/h;CD為空氣阻力系數;A為迎風面積,m2。
純電動全地形車在水平路面上加速行駛所消耗的功率為
(2)
式中:Pj為加速至速度v時消耗的功率,kW;v為車輛行駛速度,km/h;δ為車輛旋轉質量換算系數;dv/dt為行駛加速度。
純電動全地形車以某一速度v爬上一定坡度所消耗的功率為
(3)
式中:Pi為以速度v爬坡時消耗的功率,kW;α為爬坡角度。
根據公式(1)~(3)可計算出純電動全地形車滿足最高車速、加速時間、最大爬坡時所需的電機功率需求,具體見表3。

表3 電機功率需求 單位:kW
驅動電機的額定功率應該滿足純電動全地形車在最高車速時消耗的功率需求,而最大功率則應該能夠滿足加速和最大爬坡階段消耗的功率要求。
由表3可知,電機額定功率Pe應大于4.1 kW,電機的最大功率Pmax應大于14 kW。按此要求所選電機參數見表4。
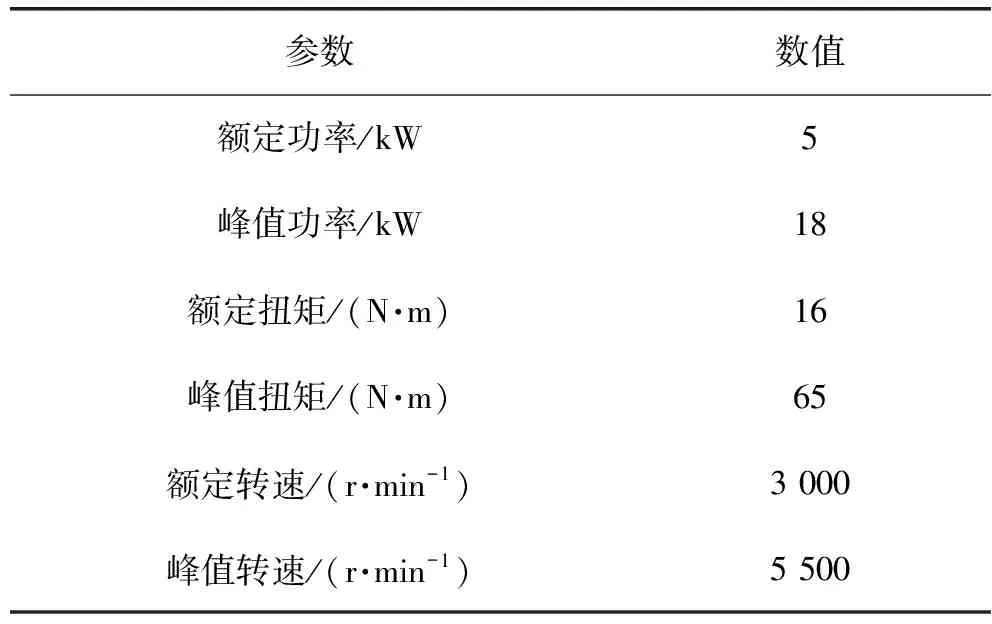
表4 電機基本參數
2.2 傳動系統設計
某純電動全地形車采用一擋傳動形式,傳動系統的傳動比應同時滿足最高車速和最大爬坡度的要求。
由電機峰值轉速和電動全地形車最高車速確定的傳動系統速比上限為
(4)
式中:i為傳動比;nmax為電機峰值轉速,r/min;rd為車輪滾動半徑,m;vmax為最高車速,km/h。
傳動系統速比下限由下述兩種方法計算出的最大值確定。
方法一,由電機最高轉速對應的輸出扭矩和電動全地形車最高車速對應的行駛阻力確定的傳動比下限為
(5)
式中:Tnmax為電機最高轉速時輸出的扭矩,N·m。
方法二,由電機最大扭矩和電動全地形車最大爬坡度對應的行駛阻力確定的傳動比下限為
(6)
式中:Tmax為電機的最大扭矩,N·m。
根據公式(4)~(6)可計算出傳動系統的傳動比為11.93≤i≤14.48。
3 傳動比優化
在AVL-CRUISE軟件中搭建純電動全地形車仿真模型[3],如圖1所示。

圖1 某純電動全地形車仿真模型
通過使用CRUISE軟件中的Matrix calculation計算模式可以快速進行矩陣運算,對傳動比范圍內的取值進行組合運算[4]。本文選擇在傳動比范圍內以等步長取10進行計算[2],不同傳動比性能仿真結果對比見表5。

表5 不同傳動比性能仿真結果對比
傳動比變化對整車性能曲線的影響如圖2所示。

圖2 傳動比變化對整車性能曲線的影響
由圖2可以看到,隨著傳動比的增大,最高車速、0~30 km/h的加速時間、30 km/h等速百公里耗電量會減小,而20 km/h的最大爬坡度會增加。這些變化呈線性趨勢,但是無法在特定的傳動比下同時獲得最佳性能。因此,必須對多個性能指標進行平衡,以確定最佳的傳動比。
在進行傳動比的綜合性能評估時,必須確保符合整車性能目標設計的要求。本文采用了一種基于權重系數的車輛綜合性能評價體系[5],該評價體系的總體評價公式為:
(7)
a+b+c+d=100%
(8)
式中:Ki為某傳動比綜合評價指數;a,b,c,d分別為最高車速、最大爬坡度、加速時間、百公里耗電量的權重系數;vi為某傳動比最高車速,km/h;vmax_all為所有傳動比中的最高車速,km/h;tmin_all為所有傳動比中0~30 km/h最短加速時間,s;t為某傳動比0~30 km/h加速時間,s;ii為20 km/h時某傳動比最大爬坡度,%;imax_all為20 km/h時所有傳動比中的最大爬坡度,%;Emin_all為所有傳動比中30 km/h等速百公里最小耗電量,kWh;E為某傳動比30 km/h等速百公里耗電量,kWh。
根據客戶對性能需求的關注程度,可設定最高車速權重系數為40%,爬坡度權重系數為30%、百公里耗電量權重系數為20%,加速時間權重系數為10%,將表5中數據代入公式(7)可計算出各傳動比的綜合評價指數,具體見表6。

表6 各傳動比綜合評價指數
由表6可以看出,傳動比i為13.75時,綜合評價指數最高,因此優化后選取傳動比i=13.75。
4 性能仿真分析
當傳動比i為13.75時,在軟件中進行仿真計算,可得到某純電動全地形車30 km/h等速百公里耗電量為4.17 kWh,驅動力與行駛阻力隨速度變化曲線如圖3所示,加速性能曲線如圖4所示,爬坡性能仿真曲線如圖5所示。

圖3 驅動力與行駛阻力隨速度變化曲線

圖4 加速性能仿真曲線

圖5 爬坡性能仿真曲線
由圖3可以看出,某純電動全地形車最高車速為42 km/h;由圖4可以看出,0~30 km/h的加速時間為4.4 s;由圖5可以看出,20 km/h速度時的爬坡性能為40.2%。
性能仿真分析結果見表7。由表可知,某純電動全地形車仿真結果滿足性能目標的要求。

表7 性能仿真分析結果
5 結束語
以某純電動全地形車為例,經過對動力傳動系統中電機和傳動系統參數的設計計算,以及通過仿真軟件的驗證,證明了該設計參數符合整車性能要求,達到預期效果,對于后續純電動全地形車的初期設計具有參考價值。
