朝天椒混合物物料特性的測定與仿真分析*
2023-06-05 01:35:56張德俊唐勇張建龍林蜀云張太華徐衛平
中國農機化學報 2023年5期
關鍵詞:測量
張德俊,唐勇,張建龍,林蜀云,張太華,徐衛平
(1. 貴州師范大學機械與電氣工程學院,貴陽市,550001; 2. 貴州省山地農業機械研究所,貴陽市,550007)
0 引言
辣椒是貴州現代農業的重要經濟支柱產業,同時也是帶動農民創業增收的一個重要途徑[1]。到2020年,全省發展辣椒種植總面積已達到363 khm2,其中以朝天椒種植為主,辣椒交易額達709億元。貴州正從“辣椒大省”向“辣椒強省”邁進[2]。針對貴州山地辣椒大面積種植的機械化收獲,設計并生產制造了山地履帶自走式辣椒收獲機,降低了辣椒收獲成本,但收獲的辣椒含雜率及漏采率較高,辣椒收獲及風選問題急待解決。
劉宇等對色素辣椒果柄的拉斷力通過振動分離的方法進行了參數的測定,可知色素辣椒果柄與莖稈拉斷力為10.3 N。Lee等[3]通過辣椒收獲機對辣椒異物分離的研究,可知辣椒的漂浮速度為11.5 ~14.3 m/s、辣椒葉的漂浮速度為3.45~5.42 m/s及辣椒莖稈的漂浮速度為10.9~12.5 m/s。孔令軍等[4]對線辣椒混合物物料特性參數進行測定,可知線辣椒果實的懸浮速度為11.18 m/s,椒葉的懸浮速度為2.95 m/s。以上研究都是針對一般辣椒、色素辣椒及線椒,缺少朝天椒混合物相關參數的研究,朝天椒收獲及朝天椒風選環節找不到可參考的參數。
基于上述情況,本文采用貴州省遵義市綏陽縣山地履帶自走式辣椒收獲機采摘的朝天椒混合物材料來進行試驗,測定朝天椒混合物的物料特性、辣椒果實與果柄的結合力及朝天椒混合物的懸浮速度,以期為辣椒清選裝置的優化及整機收獲性能的改善提供理論數據支撐。
1 朝天椒含水量及幾何尺寸測定
1.1 朝天椒含水量測定
朝天椒含水率[4]
式中:m1——朝天椒干燥前的質量;
m2——朝天椒干燥后的質量。
朝天椒含水率(10個一組)測定結果如表1所示,去掉最小值和最大值,計算可得朝天椒的平均含水率為74.7%。
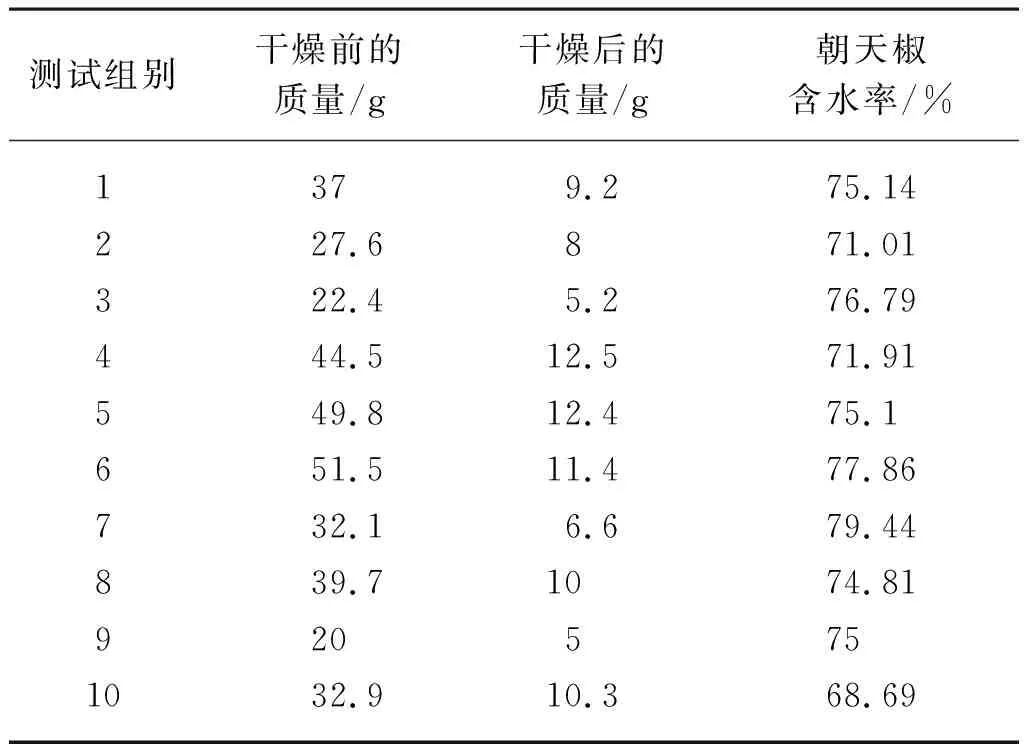
表1 朝天椒含水率Tab. 1 Water content of Chaotian pepper
1.2 朝天椒長度測定
測量朝天椒果實長度L1,采用簡單隨機抽樣,從辣椒收獲機采摘的朝天椒混合物中隨機抽取120個朝天椒進行測量,每5 mm代表一個梯度進行分類,測量結果見表2,朝天椒果實平均長度為68.5 mm。
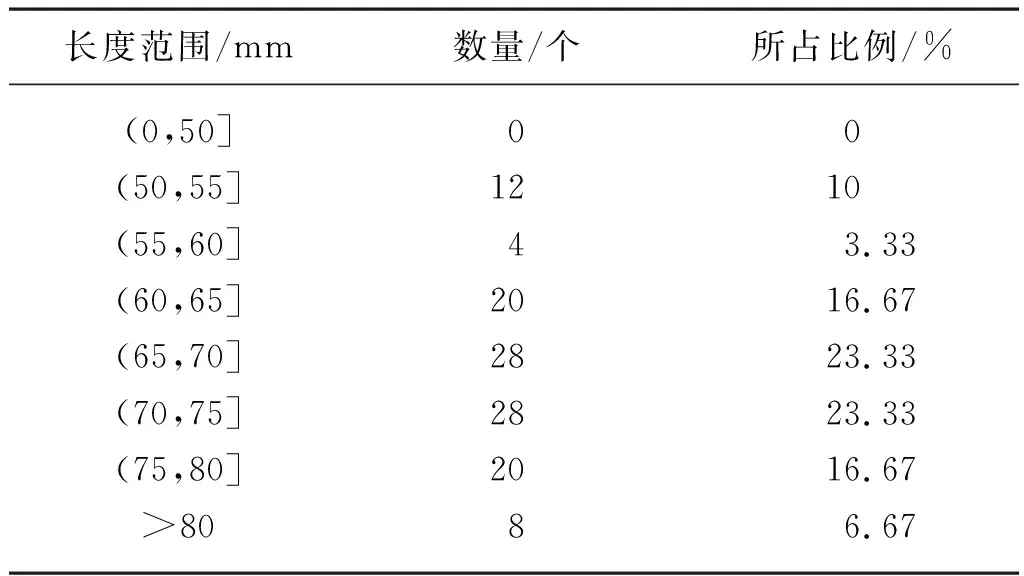
表2 朝天椒果實長度測量數據Tab. 2 Fruit length measurement of Chaotian pepper
1.3 朝天椒直徑測定
貴州朝天椒為子彈形,直徑從尖端到末端逐漸增大,但錐體幅度變化較小,可看作子彈形,測量辣椒末端直徑代表整體直徑,因為這個地方的直徑,更接近于朝天椒真實尺寸情況。采用簡單隨機抽樣方法,從收獲機采摘的朝天椒混合物中隨機抽取120個朝天椒,并用卡尺測量,每1 mm代表一個梯度,測量結果見表3,朝天椒平均直徑為9.65 mm。

表3 朝天椒直徑測量數據Tab. 3 Diameter measurement data of Chaotian pepper
2 椒葉幾何尺寸測定
朝天椒的椒葉呈橢圓形,用簡單隨機抽樣法從辣椒收獲機采摘的朝天椒混合物中隨機抽取120片椒葉測量,每10 mm為一個梯度,測量椒葉長度;每5 mm 為一個梯度,測量椒葉寬度,結果見表4和表5。辣椒葉平均長度L2=103.67 mm,平均寬度L3=45.58 mm。
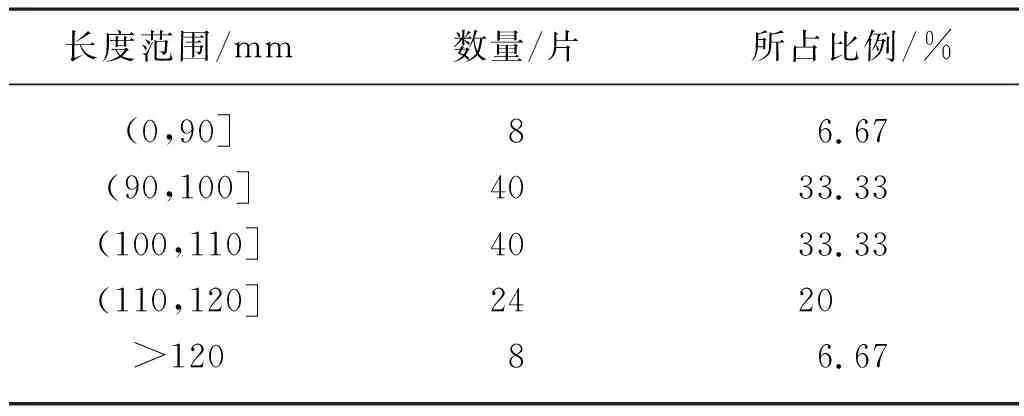
表4 椒葉長度測量數據Tab. 4 Measurement data of pepper leaf length
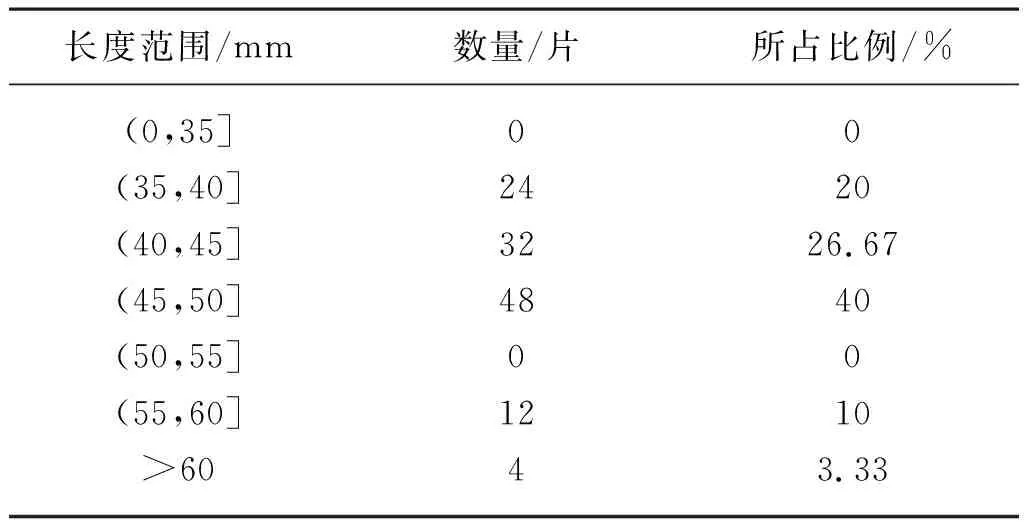
表5 椒葉寬度測量數據Tab. 5 Measurement data of pepper leaf width
3 辣椒果實及果柄結合力測定
3.1 結合力有限元仿真分析
本文運用Ansys有限元分析軟件的結構靜力分析模塊分析辣椒果柄分離的力學特性,其原理是將復雜的連續微分方程問題,轉化為有限個線性代數方程的問題,以求得近似解[5]。該仿真假設辣椒、果柄及辣椒莖稈的變形均滿足式(2)。
{F}=[K]{x}
(2)
式中: {F}——總的載荷列陣;
[K]——模型的剛度矩陣;
{x}——節點的位移列陣。
辣椒果實主要由果柄、果肉及果籽等部分組成,其縱剖面如圖1所示。影響辣椒果柄的分離特性主要是果肉、果柄及辣椒莖稈,假設這幾個組成部分為線彈性材料。辣椒果實內部簡化為一個空腔結構,果柄與辣椒莖稈被近似認為是一個圓柱體,辣椒果實三維模型如圖2所示,辣椒與辣椒莖稈幾何模型如圖3所示。

圖1 辣椒縱剖切圖
圖2 辣椒幾何模型
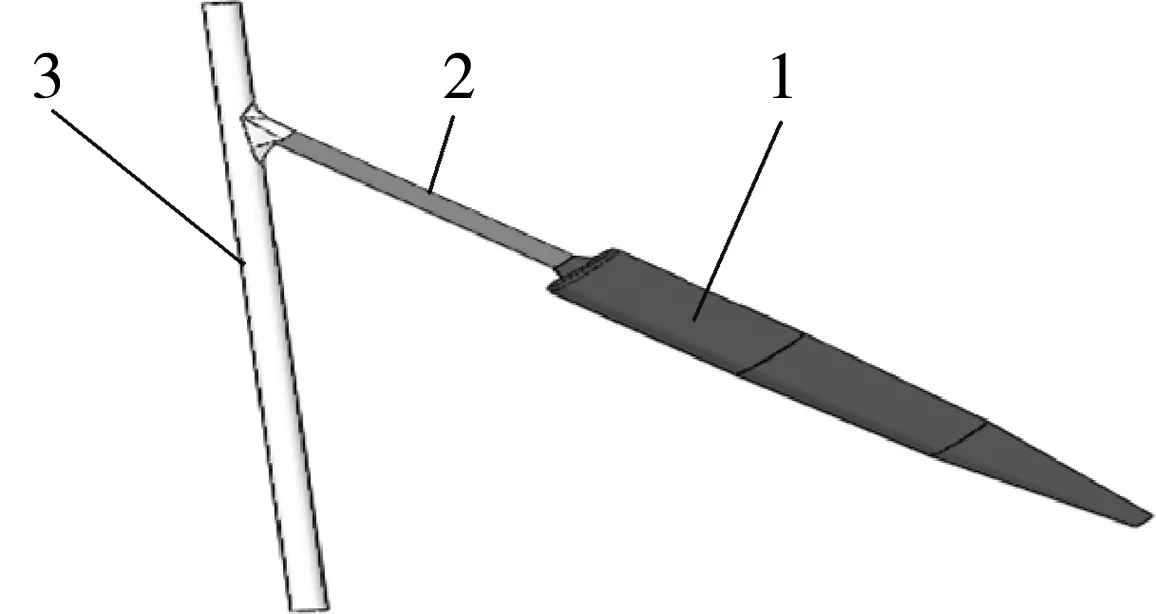
圖3 辣椒與莖桿幾何模型
將建立好的辣椒果實、果柄及辣椒莖稈模型導入Ansys Workbench中,需要設置模型材料屬性,辣椒果實的彈性模量取為6 MPa。通常水果和蔬菜的泊松比在0.2~0.5,參考謝志平等[6]的刺梨泊松比參數,設置辣椒果實的泊松比為0.3。果柄與辣椒莖稈的彈性模量和泊松比參考謝志平及侯俊銘等[6-7]研究,設置辣椒果柄及辣椒莖稈的彈性模量為9.0 MPa,泊松比設置為0.25。辣椒果實、果柄及辣椒莖稈均采用四面體類型的單元,辣椒果實、果柄及辣椒莖稈的劃分尺寸分別為2 mm、1 mm和1.5 mm,其模型網格劃分如圖4所示。
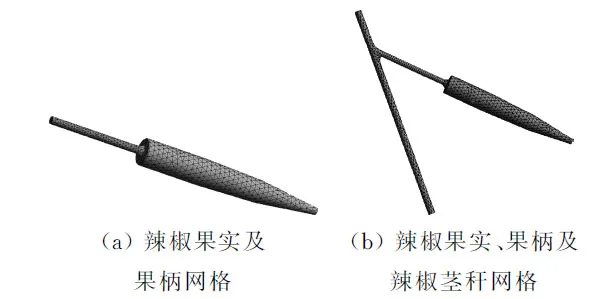
圖4 網格劃分
在辣椒果實尖端下部施加固定約束;參照微機控制電子萬能試驗機對一般果實果柄分離試驗的加載速率,在果柄一端的平面上施加加載速率4.5 mm/min的位移載荷,以模擬與辣椒果實與果柄的分離試驗,其施加載荷和約束的位置如圖5(a)所示;在辣椒莖稈上施加固定約束,同樣在辣椒果實上施加加載速率4.5 mm/min的位移載荷,以模擬與辣椒果柄與辣椒莖稈的分離試驗,其施加載荷和約束的位置如圖5(b)所示。
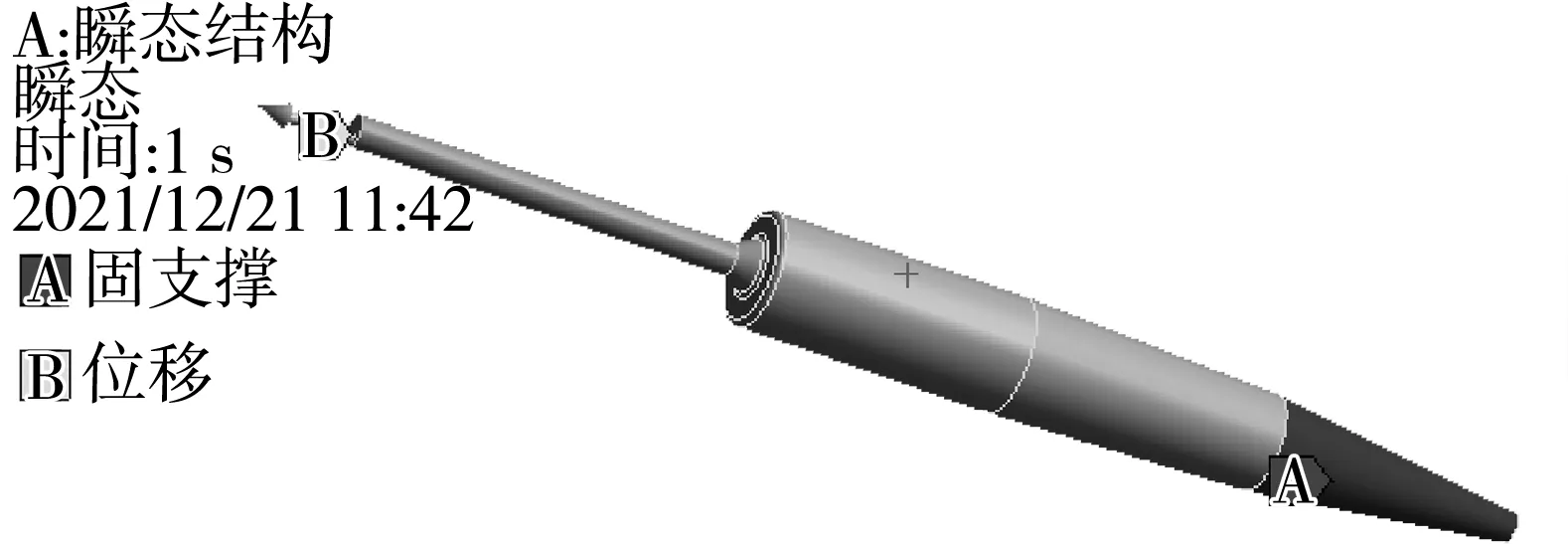
(a) 辣椒果實與果柄施加的載荷與約束
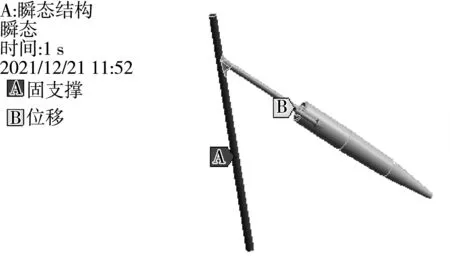
(b) 辣椒果實果柄與莖稈施加的載荷與約束
通過應力云圖能夠清楚地反映出果柄分離過程中應力的分布規律,并且可以分析出果柄脫落的部位和載荷,對于辣椒果實的自動化采收和果柄分離加工工序具有重大意義。
根據有限元模型仿真的計算結果可獲得等效應力云圖,由應力云圖可知果柄與辣椒果實及果柄與辣椒莖稈的結合區域為分離破壞區域,這也與真實采摘結果位置相吻合。
由圖6(a)可知果實與果柄的結合部位為危險破壞截面,該截面等效應力達到最大值為1.936 7 MPa。由圖6(b)可知果柄與辣椒莖稈的結合部位為危險破壞截面,危險破壞截面處應力達到最大值為1.664 5 MPa。
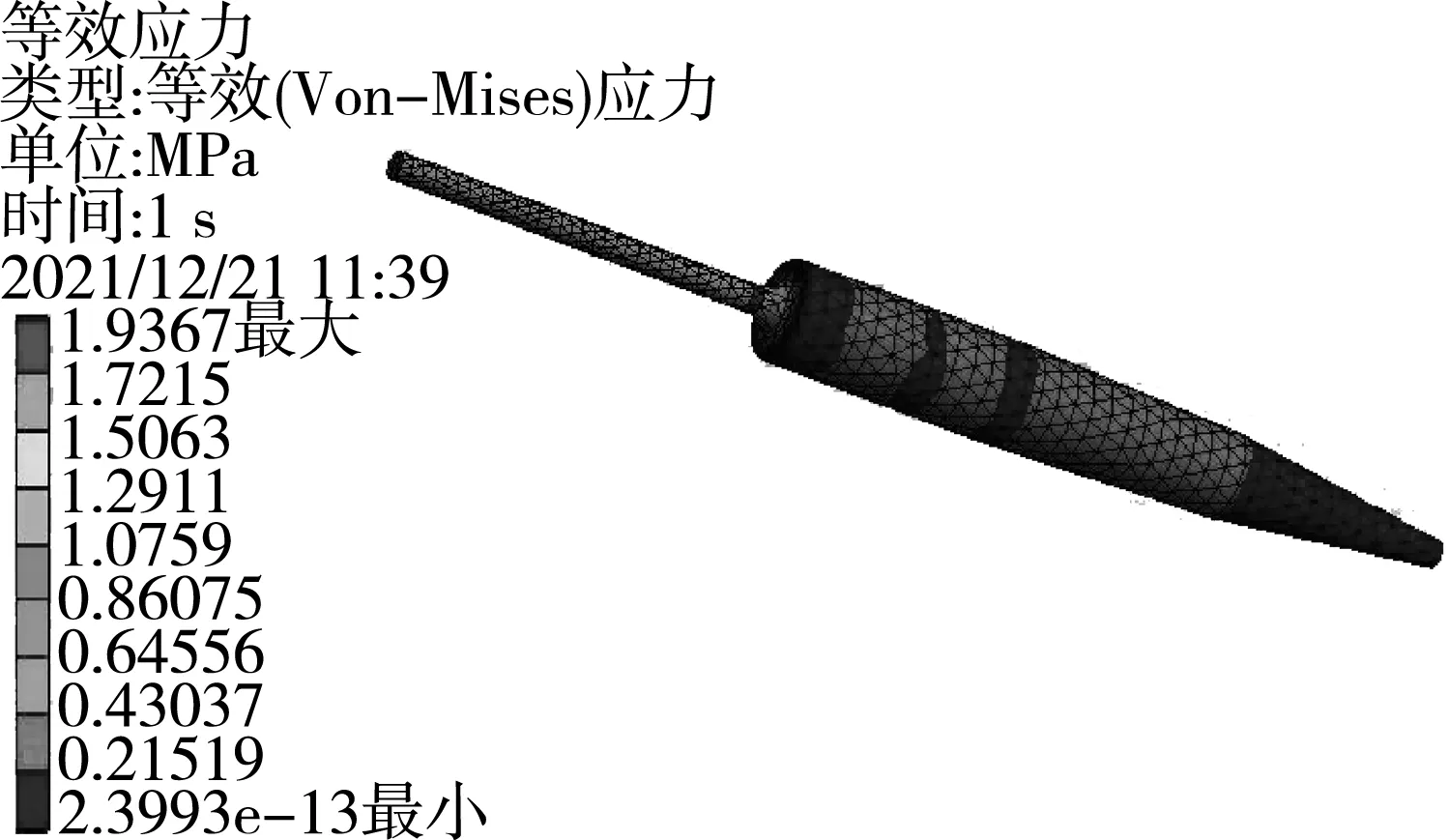
(a) 辣椒果實與果柄拉伸分離應力圖
辣椒果柄所受應力
(3)
式中:F——軸向載荷,N;
A——辣椒果柄截面積,mm2。
辣椒果柄截面積為5.9 mm2,根據辣椒果柄所受應力及截面積,通過式(3)計算可知:辣椒果實與果柄結合力為11.43 N,果柄與辣椒莖稈結合力為9.82 N。
3.2 結合力拉伸測定試驗
采用臥式手搖拉力計儀器來測量結合力,臥式手搖拉力計型號為NK300,最大測量力為30 N,儀器結構如圖7所示。
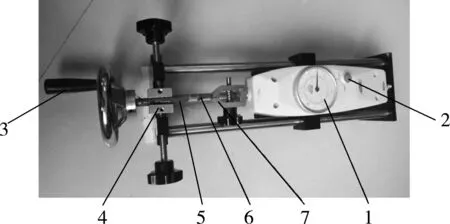
圖7 臥式手搖拉力計結構示意圖
對辣椒果柄結合力進行拉伸試驗時,臥式手搖拉力計儀器應水平放置。首先通過旋鈕打開下夾緊裝置夾緊辣椒果實;然后同樣通過上夾緊裝置夾緊辣椒果柄;其次按下回零按鈕,使臥式手搖拉力計儀器的刻度表指針歸零;最后通過緩慢搖動手柄拉伸辣椒果實與果柄,當機器發出“鐺”提示音時,表示辣椒果實與果柄已成功分離,立即停止搖動手柄,記錄機器刻度表的數值,數據即為辣椒果柄的結合力大小。通過拉伸試驗圖(圖7)可看出,辣椒果柄的斷面在果柄與果實的結合部分,果柄分離斷面與仿真結果一致。辣椒果柄與莖稈的分離步驟和辣椒果實與果柄分離步驟相同,分別測量10組辣椒果柄結合力,求平均值,測定數據如表6所示。

表6 辣椒果實及果柄結合力測量數據表Tab. 6 Data table of pepper fruit and stalk binding measurements
通過手搖拉力計儀器測得辣椒果實與果柄的平均結合力為11.54 N,果柄與辣椒莖稈的平均結合力為10.11 N。通過辣椒果柄結合力的實驗法與仿真法對比分析可知:辣椒果實與果柄結合力誤差為0.96%;果柄與辣椒莖稈結合力誤差為2.95%。
4 懸浮速度的測定
4.1 基于EDEM-Fluent耦合仿真的辣椒混合物懸浮速度測定
選擇辣椒、辣椒葉、辣椒莖稈為研究對象進行顆粒建模,由于目前EDEM軟件研究粒子模型均全部使用球形結構來描述,所以采用“多球叢聚法”的方式,對3個大小不同的研究粒子加以簡化、重疊合并及重新填充來替代實際風選的研究粒子模型[8]。顆粒模型如圖8所示,朝天椒由22個不同粒徑(最大直徑10 mm)的小球形結構合并填充而成,總長度為104 mm;辣椒葉由1 000個直徑為1 mm的球體合并填充而成,總體長度為150 mm,總體寬度為46 mm;而辣椒稈則由40個直徑為3 mm的球體合并填充而成,總體長度為107 mm。
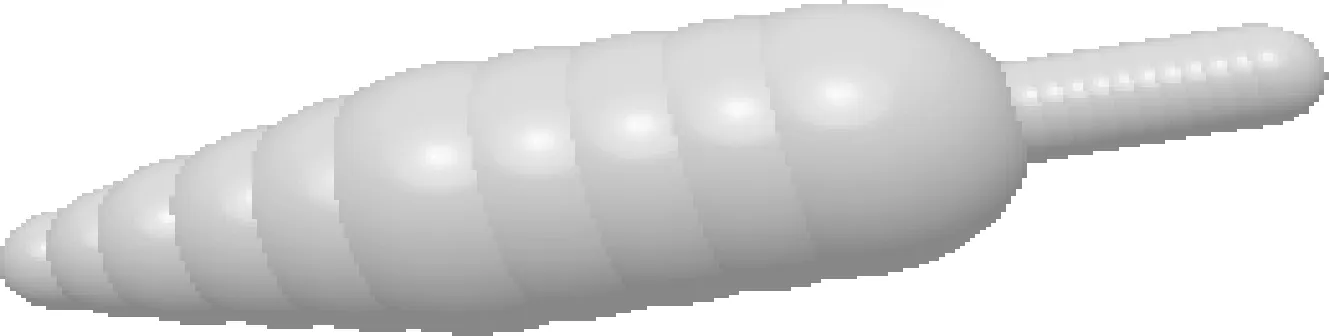
(a) 朝天椒三維模型
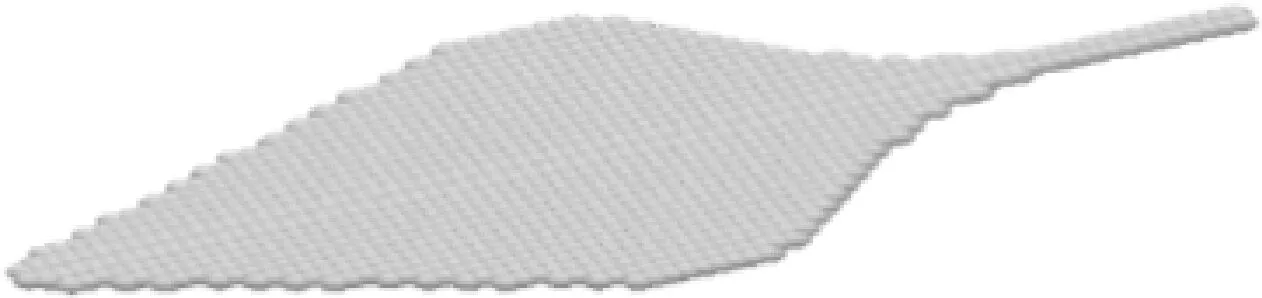
(b) 辣椒葉三維模型
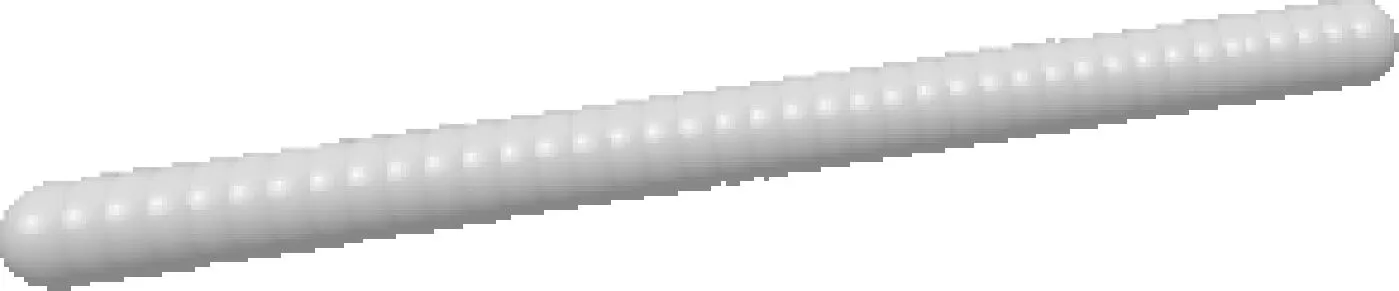
(c) 辣椒莖稈三維模型
通過WDW3100微機控制電子萬能試驗機(圖9)對朝天椒、辣椒葉及辣椒稈進行壓破試驗和拉伸試驗求取泊松比與剪切模量,試驗加載速度為6 mm/min,通過天平與量筒法測量密度。

圖9 WDW3100型微機控制電子萬能試驗機結構示意圖
泊松比
(4)
式中:εl——橫向正應變;
ε——軸向正應變。
剪切模量
(5)
式中:σ——應力。
密度[9]
(6)
式中:M——物料重量;
V2——加物料后體積;
V1——初始體積。
通過斜板試驗(滑動法與滾動法)分別測量辣椒、辣椒稈和辣椒葉與鋼板之間的摩擦接觸參數,通過碰撞試驗分別測量辣椒、辣椒稈、辣椒葉及鋼板間的恢復系數[10-11]。
將物體放置在摩擦系數測量儀上,通過緩慢調整斜面角度,當物體接近下降時,摩擦角即可測量(斜面和水平面角度),其正切為所需的物體摩擦系數。該裝置的組成結構為:工作面、框架、角度調節機構,如圖10所示。
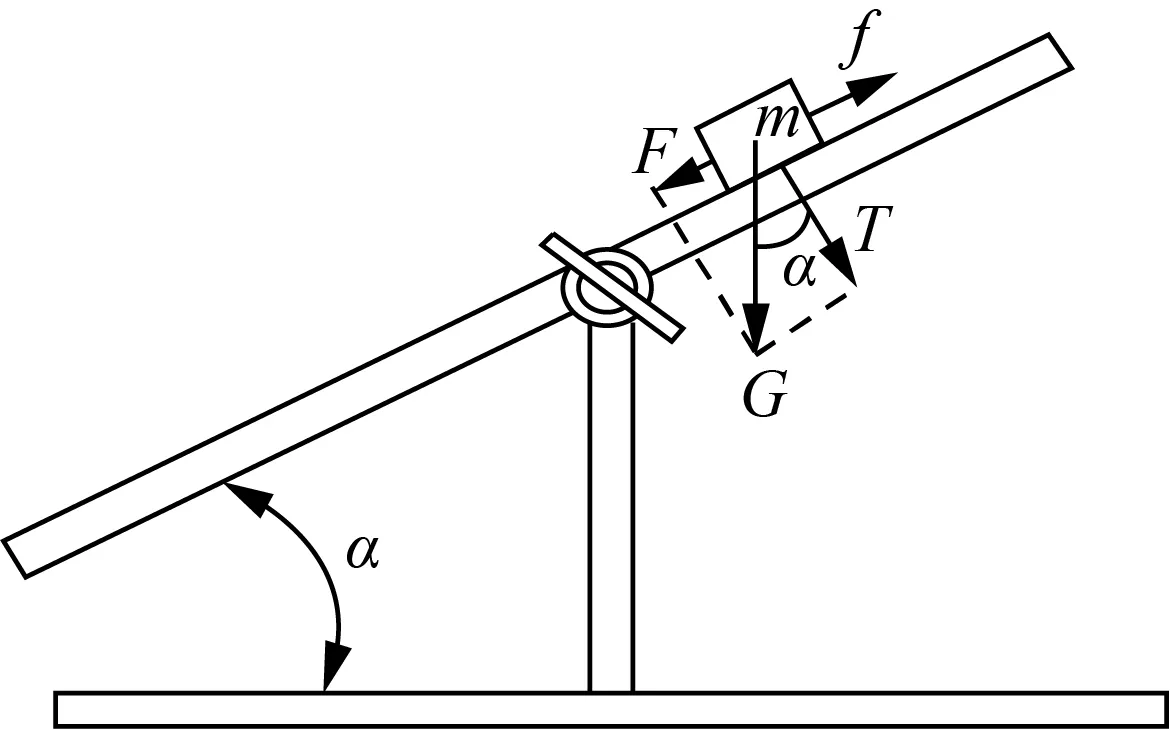
圖10 測量物體物理特性裝置原理圖
測量靜摩擦系數常用的方法是斜面滑動法,質量為m的物體在重力G作用下可以分解為2個作用力:一個力F平行于斜面和一個力T垂直于斜面。當斜面傾角α小于滑動臨界角時,F小于物體與斜面間的靜摩擦力f,物體仍處于相對靜止,但隨著傾斜傾角α的增大,F越來越大,當α大于物體的滑動臨界角時,物體將開始沿著傾斜方向下滑。其中,靜摩擦系數μs和斜傾角α的關系[10]如式(7)所示。
(7)
試驗時選取SUS304鋼板作為試驗斜面,朝天椒整體呈子彈形,而椒稈為圓柱形,為了避免單顆辣椒及辣椒稈在斜面上滾動,將4顆辣椒及辣椒稈粘合在一起放在鋼制斜板上,將平板一側與水平實驗臺始終貼合并保持不移動,同時緩慢勻速地將平板的另一側抬起,當辣椒及辣椒稈在平板上開始滑動時,使用角度感應器檢測平板與實驗臺之間的角度θ,最后通過實驗結果確定靜摩擦系數。
斜面滾動法是一種廣泛用于測量滑動摩擦系數的方法,物體在鋼板上滾動時產生滾動摩擦,物體放在傾角為α的鋼板上在一定位置以初始速度為0滾動(顆粒沿斜面的滾動距離為S),然后開始滾動到水平鋼板上,滾動摩擦使顆粒在水平鋼板上滾動一定距離,最后停下來,用卷尺測量水平鋼板上的顆粒滾動距離L,L用作評估值(圖11),在測試過程中,顆粒進行純滾動,因此它們受到的阻力被認為只是滾動摩擦,而忽略滾動過程中靜摩擦的影響,由能量守恒定律得[10, 12]。

(a) 滾動開始
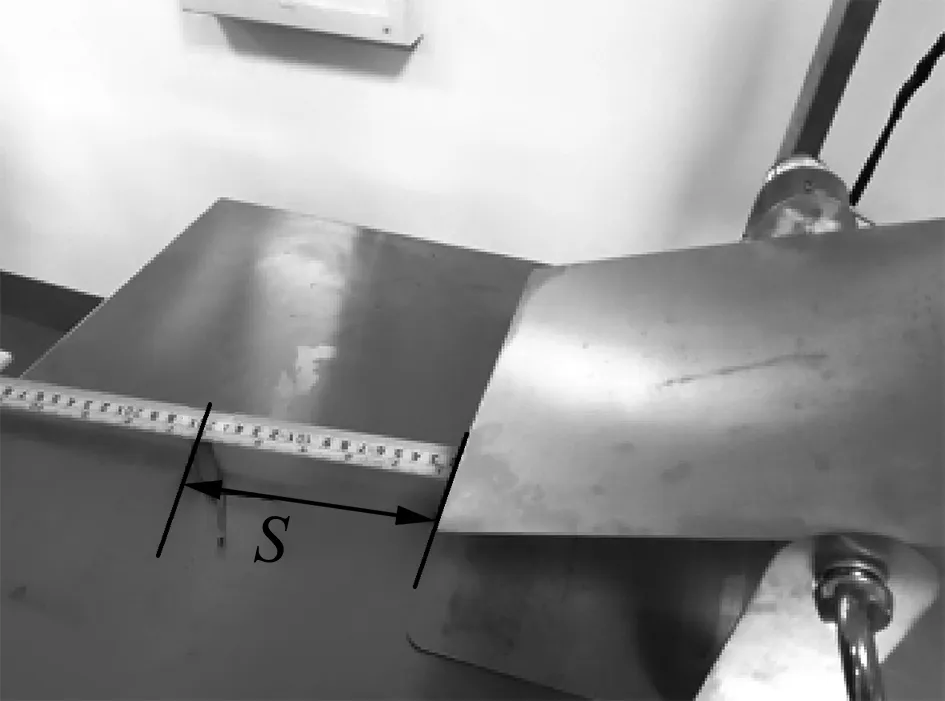
(b) 滾動結束
利用物體顆粒的碰撞彈跳試驗對物體顆粒碰撞恢復系數進行測定[13],物體發生粒子碰撞的恢復系數可以表示為物體在碰撞前后接觸點的正常瞬時分離速度v2與接觸點瞬時接觸速度v1的比值,物體顆粒恢復系數的計算公式為[11, 14]
式中:V2——分離速度;
V1——接近速度;
g——重力加速度;
H2——碰撞反彈最大高度;
H1——下落高度。
EDEM軟件中物料顆粒的力學特性參數及接觸系數如表7和表8所示,風選裝置材質選用鋼。
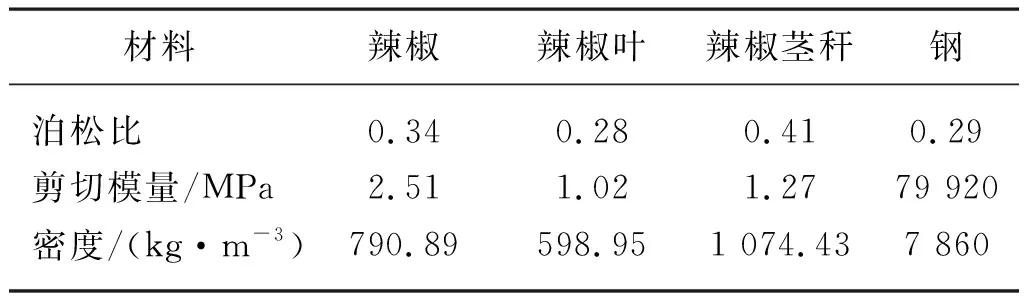
表7 材料的物理參數Tab. 7 Physical parameters of the material
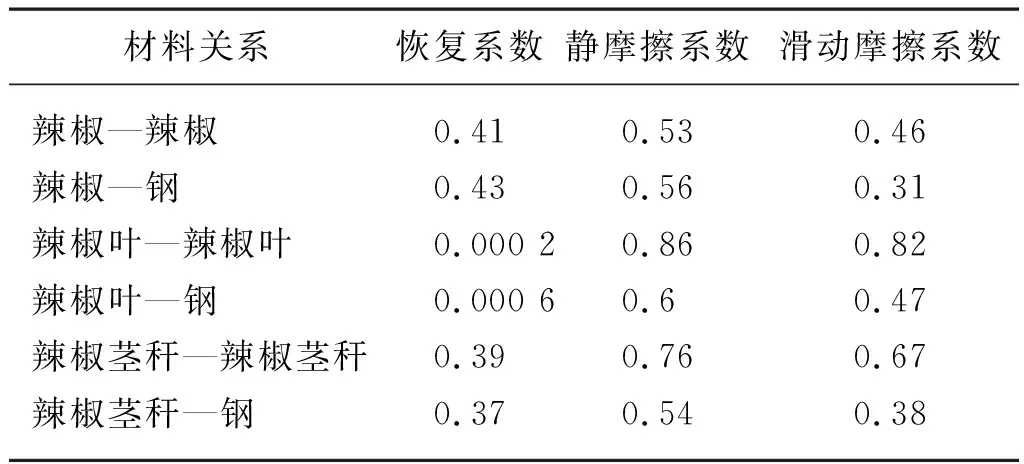
表8 相關顆粒的材料接觸系數Tab. 8 Material contact coefficients of relevant particles
在進行懸浮速度耦合仿真時,辣椒、辣椒葉及辣椒莖稈的仿真時間生成步長速率都設定為100個/s,EDEM中仿真的固定時間生成步長設置為29.678 4%,即7×10-6s,仿真時間生成總時長為6 s。Fluent軟件中模擬仿真計算模型采用標準的k-ε湍流模型,時間步長設定為EDEM的100倍,即時間步長設置為7×10-4s,總的步數為8 571步。
在風選裝置的中間設置顆粒生成工廠,然后在風選裝置下部設置進風口,最后在風選裝置上部設置出風口。完成了EDEM-Fluent耦合的基本設置后,開始進行耦合仿真,朝天椒懸浮速度的仿真,以風速大小為13 m/s進行耦合仿真;辣椒葉懸浮速度的仿真,以風速大小為3.6 m/s進行耦合仿真;辣椒莖稈懸浮速度的仿真,以風速大小為9 m/s進行耦合仿真,風選結果如圖12所示。從圖12(a)中可以看出,辣椒顆粒由風選裝置中間的顆粒工廠出料生成自由下落,然后在風選裝置下部進風口風力作用下,辣椒顆粒懸浮并由風選裝置出風口被吹出;從圖12(b)中可以看出,辣椒葉顆粒由風選裝置中間的顆粒工廠出料生成自由下落,然后在風選裝置下部進風口風力作用下,辣椒葉顆粒懸浮并由風選裝置出風口被吹出;從圖12(c)中可以看出,辣椒莖稈顆粒由風選裝置中間的顆粒工廠出料生成自由下落,然后在風選裝置下部進風口風力作用下,辣椒莖稈顆粒懸浮并由風選裝置出風口被吹出。
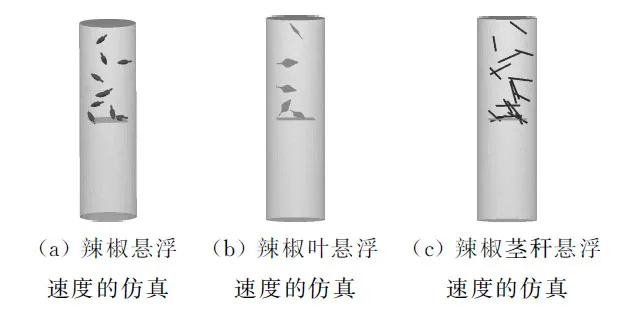
圖12 懸浮速度的仿真
通過EDEM與Fluent軟件的耦合對辣椒、辣椒葉及辣椒莖稈的仿真分析可知:朝天椒果實在風速為13 m/s可實現懸浮;辣椒葉在風速為3.6 m/s可實現懸浮;辣椒莖稈在風速為9 m/s可實現懸浮。
4.2 懸浮速度測定實驗
使用氣流將辣椒、椒葉和莖稈分離,主要根據辣椒、椒葉和莖稈的懸浮速度不同,風選的氣流超過辣椒葉和莖桿的懸浮率,但小于朝天椒的懸浮率。試驗設備采用貴州省山地農業機械研究所實驗室的懸浮速度測定裝置進行測量。測量裝置如圖13所示。
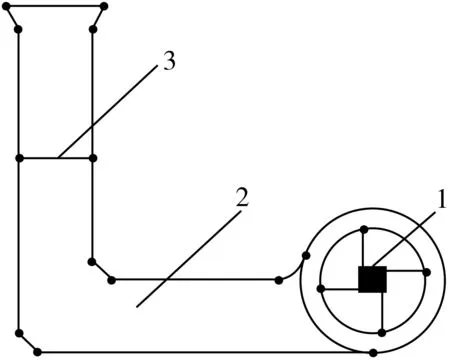
圖13 懸浮速度測定裝置結構示意圖
試驗時,先開啟發動機,然后把辣椒放在試驗裝置小阻尼網上,調節發電機速度,逐漸增加風扇風速,當大部分辣椒完全漂浮并平衡在小阻尼網格頂部時,此時小阻尼網格上的最大風速可以用風速計測量,該風速就是辣椒懸浮的速度;再把椒葉放在試驗裝置小阻尼網上,加大風機風力,當大部分椒葉完全浮在小阻尼柵上方并保持平衡時,可用風速計測量小阻尼柵上的最大風力,此風速就是椒葉懸浮的速度;最后再把辣椒莖稈放在試驗裝置小阻尼網上,增加風力,當大部分辣椒莖稈漂浮在小阻尼格上并完全平衡時,此時小阻尼格內的最大風速可用風速計測出,此風速即為辣椒莖稈的懸浮速度,測量結果見表9。
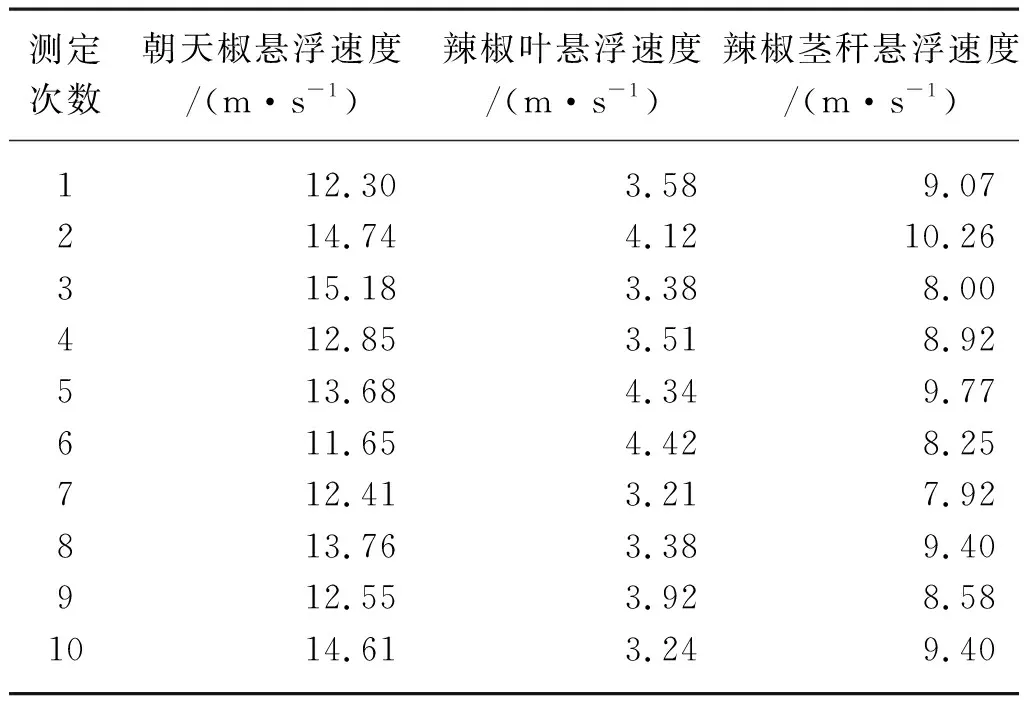
表9 混合物懸浮速度測試數據Tab. 9 Suspension velocity test data of the mixture
經計算,朝天椒果實平均懸浮速度為13.37 m/s,辣椒葉平均懸浮速度為3.71 m/s,辣椒莖稈平均懸浮速度為8.96 m/s。通過辣椒、辣椒葉及辣椒莖稈懸浮速度實驗法與仿真法對比分析可知,辣椒懸浮速度誤差為2.85%,辣椒葉懸浮速度誤差為3.06%,辣椒莖稈懸浮速度誤差為0.45%。
5 結論
辣椒果柄的結合力通過Ansys靜力學仿真及拉伸試驗進行測定;而辣椒混合物懸浮速度采用EDEM與FLUENT耦合風選仿真及懸浮試驗來進行測定。試驗所測數據與仿真數據對比分析,可得以下結論。
1) 通過Ansys靜力學仿真可知,辣椒果實與果柄的結合力為11.43 N,果柄與辣椒莖稈的結合力為9.82 N;而通過拉伸試驗,可測得辣椒果實與果柄的結合力為11.54 N,果柄與辣椒莖稈的結合力為10.11 N。經過辣椒果柄結合力的實驗法與仿真法對比分析可知,辣椒果實與果柄結合力誤差為0.96%,果柄與辣椒莖稈結合力誤差為2.95%。
2) 通過EDEM與FLUENT耦合風選仿真可知,朝天椒果實在風速為13 m/s可實現懸浮,辣椒葉在風速為3.6 m/s可實現懸浮,辣椒莖稈在風速為9 m/s可實現懸浮;而通過懸浮試驗,可測得朝天椒果實懸浮速度為13.37 m/s,辣椒葉懸浮速度為3.71 m/s,辣椒莖稈懸浮速度為8.96 m/s。通過辣椒、辣椒葉及辣椒莖稈懸浮速度的實驗法與仿真法對比分析可知:辣椒懸浮速度誤差為2.85%;辣椒葉懸浮速度誤差為3.06%;辣椒莖稈懸浮速度誤差為0.45%。
3) 以上研究數據可進一步為優化辣椒清選分離裝置及改善辣椒收獲機收獲性能提供數據支撐,對于促進貴州朝天椒產業的發展具有十分重要的意義。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00