2020年捷豹路虎衛士發動機無法正常啟動
2023-06-07 13:43:46浙江蔡永福
汽車維修與保養 2023年3期
◆文/浙江 蔡永福
故障現象
一輛2020年生產的捷豹路虎衛士,搭載AJ20-P6H型3.0T發動機,VIN碼為SALEA7EU3L*******,行駛里程為29521km。車主反映該車發動機無法正常啟動,且儀表臺上出現找不到智能鑰匙的提示信息。車主按照提示嘗試進行應急啟動,發動機得以啟動,并及時將車開進我店進行檢查。
故障診斷與排除
接車后,首先驗證故障現象。按點火開關,發動機無法正常啟動,且儀表臺上提示“找不到智能鑰匙,請參照手冊,將智能鑰匙放在顯示位置然后按啟動按鈕”(圖1)。按照提示,將智能鑰匙放在儀表臺顯示的位置進行應急啟動,發動機順利啟動。按壓遙控器上的各個按鈕進行測試,各按鍵功能正常。測試無鑰匙進入功能,沒有反應,且只有左前門把手上的無鑰匙上鎖功能正常,其他門把鎖無法實現無鑰匙上鎖。
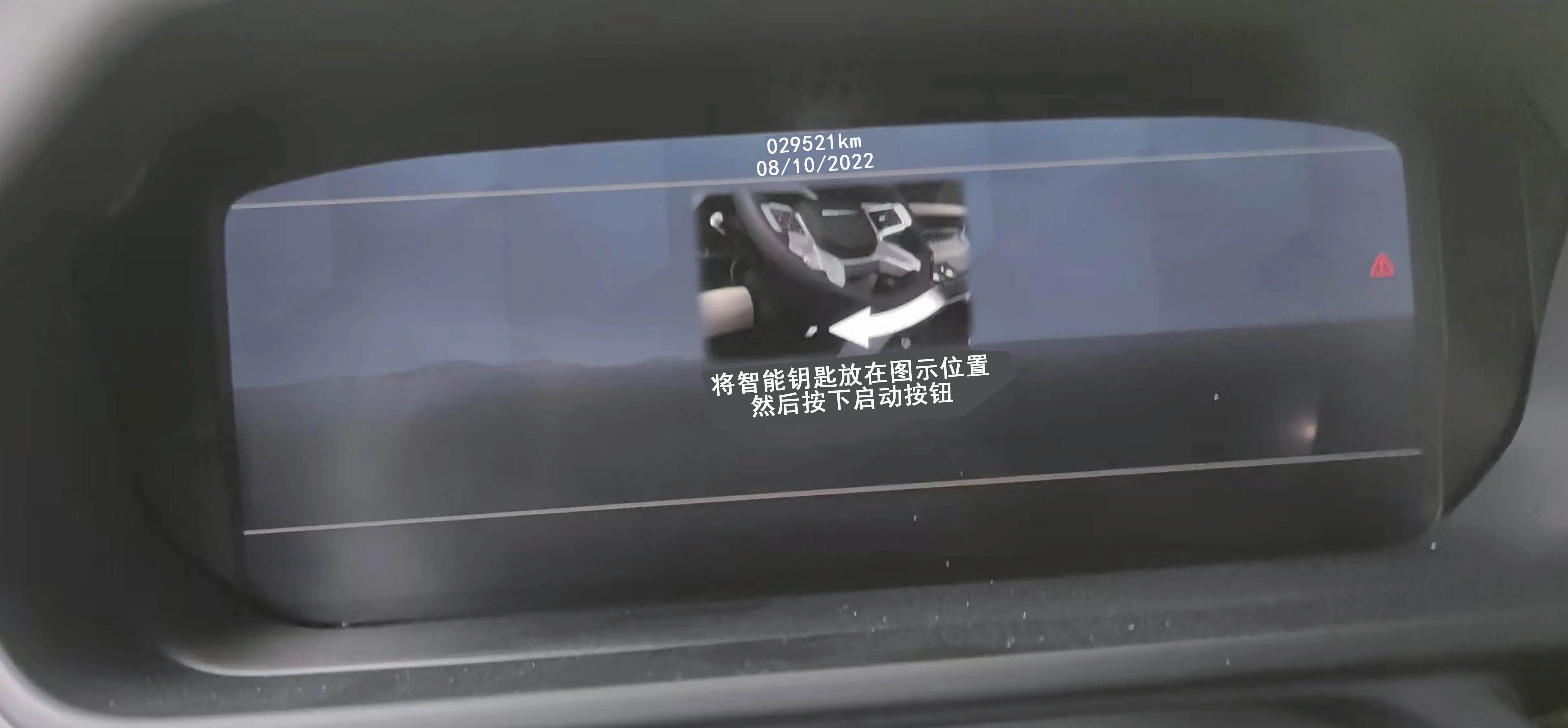
圖1 故障車儀表臺上的提示信息
對故障車進行檢查并詢問車主,該車未進行任何加裝或改裝,且無任何維修歷史。查詢技術網站,未發現任何與故障車型相關的技術公告和服務活動。連接診斷電腦TCD,多個控制模塊中存有多個故障碼(圖2)。其中,遙控功能執行器KVM模塊中存有故障碼B1DE455-后超寬頻收發器未配置。進一步查詢,對于故障碼B1DE455的描述和可能故障原因如圖3所示。
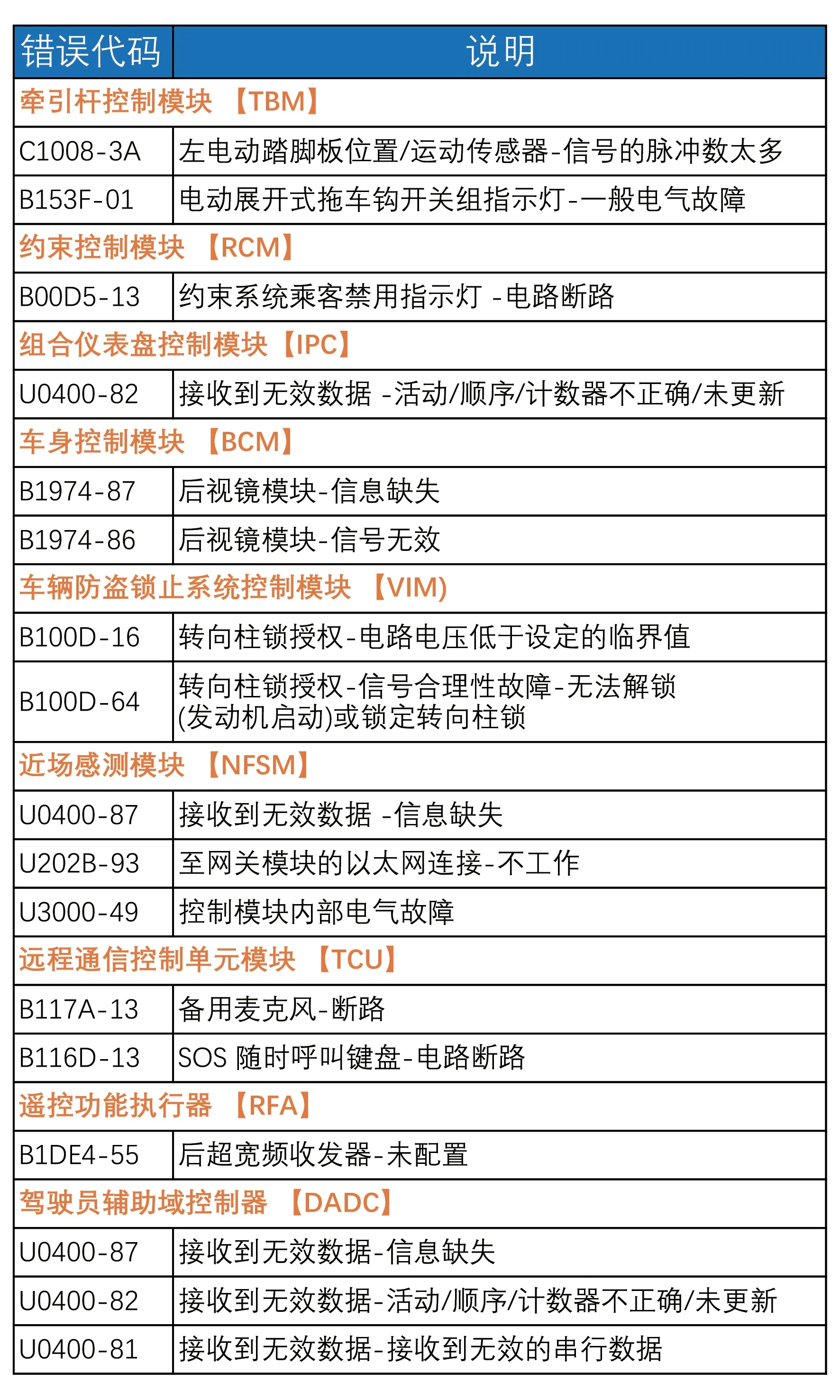
圖2 故障車上存儲的故障碼
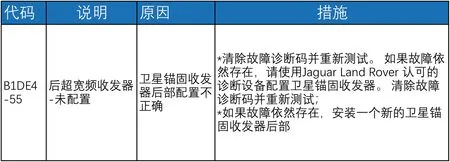
圖3 關于故障碼B1DE455的描述及可能原因
根據故障現象和故障碼B1DE455,基本可以判定,該車的故障根源在于寬頻衛星錨固天線存在故障。該車防盜系統包含了被動進入和被動啟動(PEPS)系統增強功能,進一步提升了車輛的防盜能力。
超寬帶技術包含兩個新的衛星錨點收發器,它們與智能鑰匙一起編程到車輛上,一個位于頂篷前部,另一個位于頂篷后部。這樣一來,就需要2條距離信息才能識別智能鑰匙的位置,可完全覆蓋車內和車外,并測量車輛和智能鑰匙之間的實際距離。通過測量RF信號的傳播時間可估算發射器和接收器之間的距離,如果車輛檢測到智能鑰匙并未真正靠近車輛,系統將會忽略收到的指令。
被動進入收發器通過局域互聯網絡(LIN)與RFA進行通信。當被動啟動程序啟動并檢測到智能鑰匙后,被動進入收發器將計算智能鑰匙的距離。超寬帶技術的精度高達10cm,可實現非常精準的區域定位功能,只有在車輛用戶非常接近車輛時才會觸發門鎖釋放機構。因此,只有當智能鑰匙在此許可的區域之內時,RFA才允許智能鑰匙進行授權。當衛星錨點天線出現故障時,由于車輛無法正確定位智能鑰匙的具體位置,所以會忽略收到的指令,導致發動機無法正常啟動,且無鑰匙進入功能失效。
很顯然,故障車的故障現象完全符合衛星錨點存在故障的基本特征。因此,可以初步判定導致該車故障的可能原因有:后部的衛星錨固收發器線路故障;后部的衛星錨固收發器本身故障;無鑰匙(RFA)模塊本身故障。
根據故障碼指引,使用診斷電腦TCD清除故障車上的所有故障碼后重新讀碼,故障車遙控功能執行器RFA模塊沒再出現任何故障碼(圖4)。
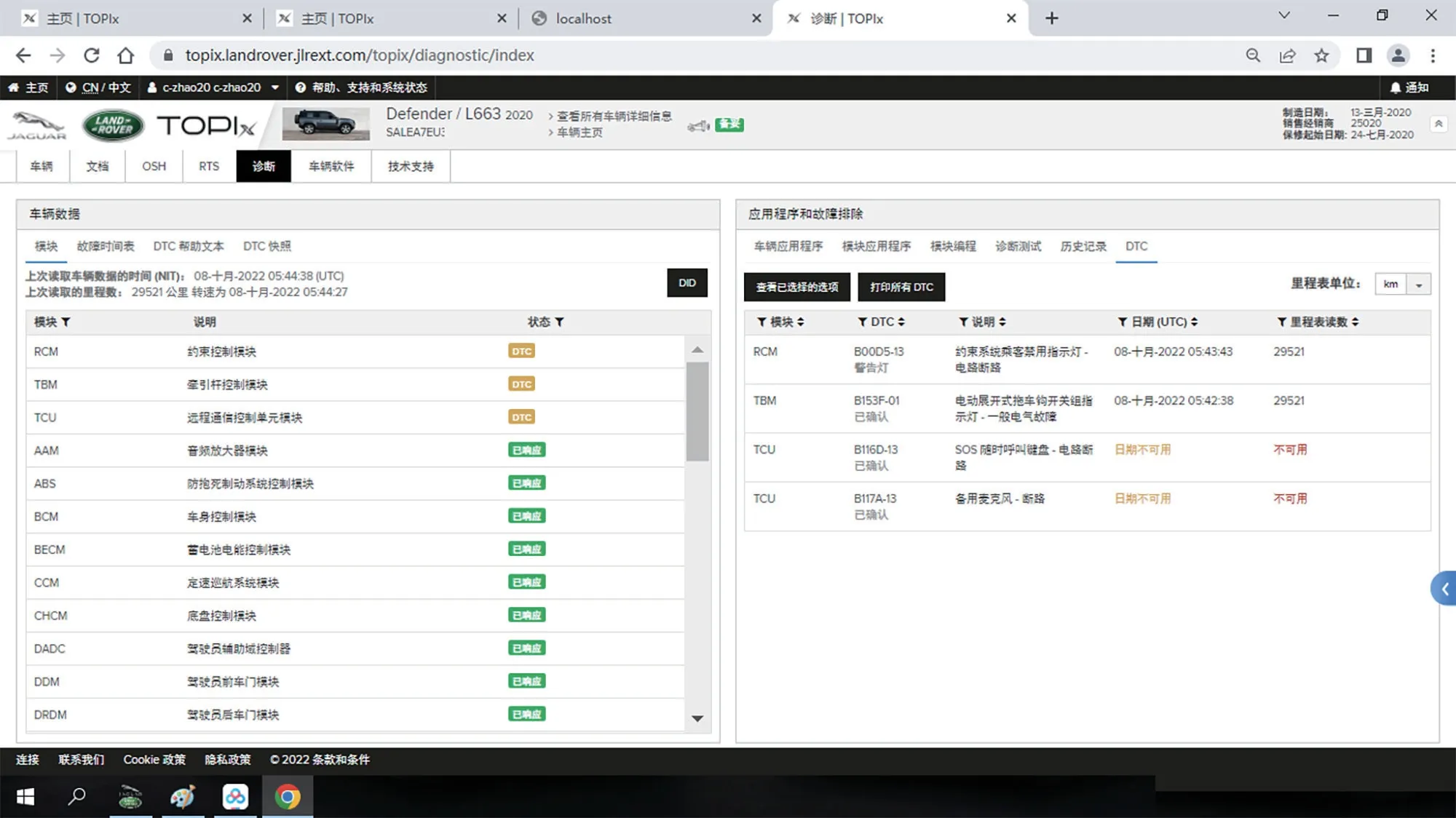
圖4 刪除故障碼后重新讀取的故障碼
重新進行無鑰匙進入和發動機啟動測試,故障依舊。用診斷電腦TCD進行第三次讀碼,發現在遙控功能執行器RFA模塊中又記錄了故障碼B1DE455(圖5)。
圖5 第三次讀碼結果
使用診斷電腦TCD執行無鑰匙模塊RFA-按需自檢,提示應用程序失敗;使用診斷電腦TCD執行無鑰匙模塊-RFA-超寬量程SAT更換,提示無法操作;使用診斷電腦TCD對遙控功能執行器RFA進行更新,提示遙控功能執行器RFA已鎖定;使用診斷電腦TCD執行遙控功能執行器RFA更換功能,仍然提示遙控功能執行器RFA已鎖定(圖6)。嘗試執行車輛配置更新,結果更新成功,之后試車,卻故障依舊。

圖6 遙控功能執行器已鎖定
查閱2020年路虎衛士衛星錨點天線電路圖(圖7),并根據此圖使用PICOC通道測得衛星錨點SAT供電C9PK46-3波形為12.3V直線,B通道測得LIN線C9PK46-2的波形為11.22V直線,如圖8所示。
圖7 故障車型衛星錨點天線電路圖
圖8 故障車衛星錨點天線C9PK46-2和C9PK46-3上的波形
測量搭鐵C9PK46-1與供電C9PK46-3之間的電壓,為12.3V,說明后部的SAT供電和搭鐵正常。按遙控器時,檢測C9PK46-2類似LIN線的波形(圖9)輸出,發現只有主模塊(RFA)發出的信號,而沒有從模塊衛星錨固天線(SAT)發出的信號波形,說明RFA模塊工作正常,故障點在衛星錨固天線本身。
圖9 故障車衛星錨點天線C9PK46-2上的波形
檢測正常車輛的衛星錨固天線與無鑰匙模塊之間通訊線LIN的波形(圖10)可以看出,正常情況下,應有主從信號波形,且主模塊的最低電位比從模塊的最低電位要高,它們之間的電壓差約為150mV。
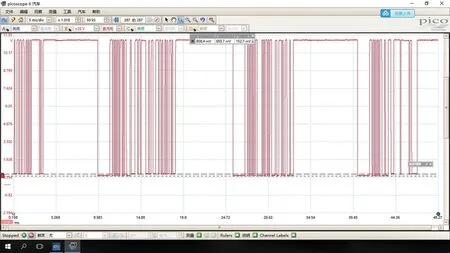
圖10 同款正常車輛衛星錨點天線C9PK46-2上的波形
根據上述檢測,可以判定,該車是由于后部的衛星錨固天線本身故障,導致系統無法正確定位智能鑰匙的具體位置,駕駛者做出啟動發動機的操作指令被系統忽略掉,發動機無法正常啟動,且無鑰匙進入功能失靈。故障車型衛星錨點部件位置圖如圖11所示。
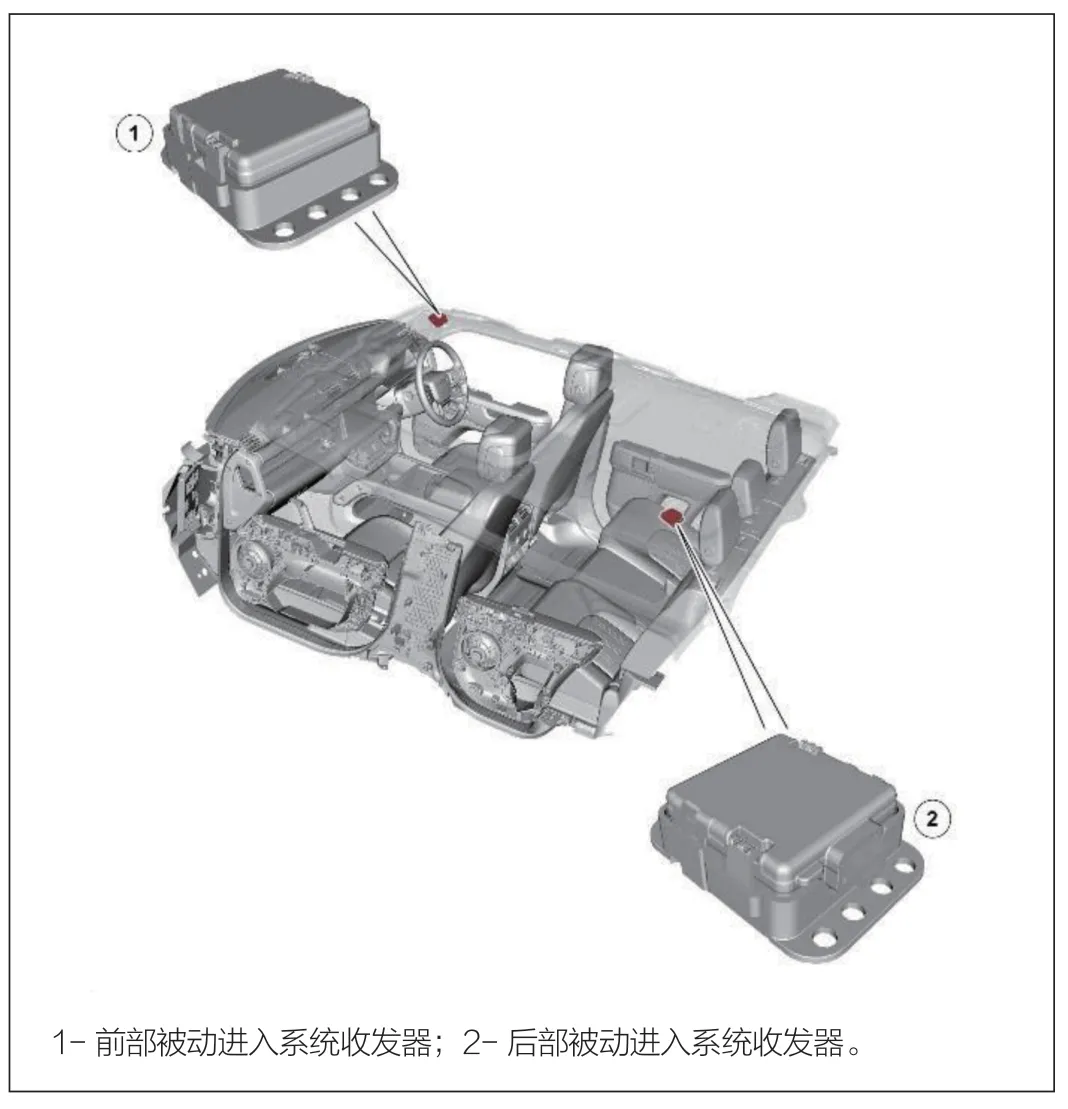
圖11 故障車型衛星錨點部件位置圖
更換故障車后部的衛星錨點SAT天線和無鑰匙模塊,使用診斷電腦TCD對衛星錨點和無鑰匙模塊進行編程后試車,發動機正常啟動,無鑰匙進入和無鑰匙鎖定功能均恢復正常,故障被徹底排除。
維修小結
本案例中,故障車型智能鑰匙系統采用了超寬帶技術。當超寬頻衛星錨點天線出現故障時,由于車輛無法正確定位智能鑰匙的具體位置,系統就會忽略其收到的指令,導致發動機無法正常啟動,同時免鑰匙進入功能失效。在維修過程中,需要注意:衛星錨點收發器是與智能鑰匙一起編程到車輛上,當衛星錨點收發器因為故障需要更換時,應同時更換無鑰匙模塊RFA,并使用診斷電腦進行編程。
本案例中,故障車型智能鑰匙的驗證流程是:遙控功能執行器(RFA)接收到車門鎖定/解鎖請求;接收到車門鎖定/解鎖請求后,RFA通過LF天線以125kHz的頻率將質詢數據發送至智能鑰匙;智能鑰匙將會對LF信號進行回應,處理收到的信息并利用單獨的射頻(RF)通道對車輛做出回應(射頻頻率:歐洲為433MHz,其他為315MHz),射頻接收器RF(集成在RFA中)通過RF天線收到該回應。
此外,RFA也會通過衛星錨點收發器向智能鑰匙發送單獨的質詢信息,以便準確地驗證并獲得智能鑰匙位置,其驗證流程是:RFA通過LIN連接向衛星錨點收發器發送質詢數據;衛星錨點收發器處理該數據,然后通過單獨的RF信號(中國為4.5 kMHz)將其發送至智能鑰匙;收到信號后,智能鑰匙將會通過RF信號(中國為4.5 kMHz)將身份驗證信息發送回衛星錨點收發器;接收到身份驗證信息后,衛星錨點收發器將會通過LIN連接將該信息發送回RFA。
完成上述驗證后智能鑰匙系統將按照正常方式工作。智能鑰匙系統控制原理如圖12所示。

圖12 故障車型智能鑰匙系統控制原理
另外,故障車型的智能鑰匙系統中還又一套被動啟動驗證流程。在智能鑰匙系統中,RFA會提示每個內部LF天線輸出一個信號,當智能鑰匙位于乘客艙內時,智能鑰匙將會檢測到LF信號,并將數據識別信號發送回RF接收器進行響應,RF接收器再將數據識別信號發送至RFA。此外,RFA會通過被動進入收發器向智能鑰匙發送單獨的質詢信息,以進行身份驗證,并準確獲取智能鑰匙位置。當接收到的數據與存儲在RFA中的數據匹配時,RFA通過發送“智能鑰匙有效”信號來繼續執行被動啟動過程。BCM/GWM通過HSCAN車身系統總線接收有效信號,并通過內部計算確認響應,BCM/GWM通過HSCAN人機接口(HMI)系統總線將編碼數據傳輸至IPC。通過IPC確認后,將啟用電源模式6(點火開關打開)。BCM/GWM將與電動轉向柱鎖控制模塊(VIM)機構交換加密數據,以授權解鎖轉向柱(IPC僅為VIM電機提供接地)。然后,BCM/GWM將會向PCM發送啟動信號,并啟用燃油泵繼電器。該繼電器將啟動蓄電池的電源提供給燃油泵驅動模塊(FPDM)。
當RFA未能找到智能鑰匙時,IPC信息中心將發送提示信息:“將智能鑰匙放在如圖所示位置,然后按下啟動按鈕”。此時,就必須使用免鑰匙啟動備用流程(也就是應急流程)來啟動車輛。
專家點評
焦建剛

這是一篇智能進入與啟動系統的典型案例。雖然故障原因不復雜,但該車型的控制邏輯與常規車輛有所不同。值得注意的是,近年來,多位置鑰匙信號定位技術在新車型上的應用越來越廣。多位置鑰匙信號定位系統與早期的智能進入與啟動系統有較大區別。以前的系統,只要在車內能夠定位到智能鑰匙(有一個車內傳感器識別到智能鑰匙),就可以正常啟動車輛。但現在部分車型采用多位置定位技術,即使只有一個信號缺失,也會導致無鑰匙啟動功能失效。希望這一點能夠引起從業者的重視。
作者的檢測過程中,使用了波形檢測的診斷方法,這非常值得表揚和贊賞。因為對于通過LIN線傳輸的鑰匙信號,如果沒有特殊的檢測方法是很難進行精準判定的。另外,作者對該車型的無鑰匙進入與啟動系統的工作原理進行了詳細說明,且描述得非常清晰、準確,讓讀者能夠很容易了解該車型無鑰匙進入與啟動系統的工作原理,使得讀者既了解故障原因,又對系統的工作原理有一個全面的認識。這一點非常不錯,值得鼓勵和表揚。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
汽車維護與修理(2016年10期)2016-07-10 08:17:41
兒童故事畫報(2016年3期)2016-05-17 07:54:55
汽車維修與保養(2015年6期)2015-04-17 03:31:50
小朋友·快樂手工(2015年2期)2015-03-13 00:15:54
汽車維護與修理(2015年2期)2015-02-28 12:15:39
