家長對停車場兒童行人安全的管控行為影響因素
2023-06-07 13:39:58李靖宇
黑龍江交通科技 2023年6期
楊 杰,李靖宇,孫 輝
(合肥工業大學,安徽 合肥 230009)
1 引 言
世界范圍內,大約有80%的兒童行人死亡的事故并非發生在路口[1]。據美國國家公路交通安全管理局(NHTSA)估計,2007年在停車場和私人車道等交通場所,交通事故造成了5000名14歲以下的兒童受傷,205名14歲以下的兒童死亡[1]。雖然沒有最新的統計數據公布,但相關學者認為兒童在停車場中的行人安全問題依舊嚴峻[2]。因此,我們不僅要關注兒童道路交通安全,對其他交通場所尤其是停車場中的兒童行人安全也應有足夠的關注。
綜合學者們對兒童在路口和道路中段的研究成果,我們認為至少三個因素共同導致停車場里的兒童行人容易卷入交通事故中。首先,兒童行人能力較差。兒童難以識別環境中的潛在危險,更難以做出正確的應對。例如,兒童可能無法理解汽車倒車燈閃爍的含義。其次,兒童體型較小,駕駛員難以觀察到兒童。以中國為例,西昌市8歲兒童平均身高為137 cm[3],蹲下來只有0.75 m,低于小汽車的引擎蓋高度。因此,9歲及其以下的兒童,更可能因為被車輛本身遮擋住內而發生交通事故。最后,兒童在停車場中缺乏成年人的看護。停車場兒童行人安全問題并沒有引起家長足夠的重視,家長掌握的兒童行人安全風險管控方式也有所欠缺。例如,美國的一項觀察研究發現,在停車場中的48.1%兒童獨自穿過道路,超過50%的兒童先于成人下車[1]。
家長的風險管控行為(即對兒童行人的監督、看護行為)是影響兒童行人安全的重要因素,改善家長的管控行為能有效提高兒童在停車場的行人安全。關于影響家長的管控行為的因素尚不得知,本次研究通過問卷調查,探索影響家長對停車場兒童行人安全風險管控行為的因素。研究結果可以為交通安全教育干預提供理論依據和實踐指導。
2 數據獲取
2.1 模型構建
計劃行為理論由理性行為理論和多屬性態度理論逐步發展、完善而成,包括行為、意向、主觀規范、態度和感知行為控制等基本要素。為確保計劃行為理論的普適性,計劃行為理論可以增加其他相關解釋變量,只要新增的相關解釋變量有助于解釋和預測個體行為。目前,計劃行為理論已得到社會行為領域學者的廣泛認可。在交通領域中,計劃行為理論可以幫助學者更好地對不安全交通行為的判斷和決策過程進行解釋和預測[4],故使用計劃行為理論來探索家長管控行為的影響因素。根據計劃行為理論的相關研究成果,提出以下假設:
假設H1a:知覺行為控制對看護行為有正向的影響;
假設H1b:知覺行為控制對看護意向有正向的影響;
假設H2:主觀規范對看護意向有正向的影響;
假設H3:態度對看護意向有正向的影響;
假設H4:看護意向對看護行為有正向的影響。
態度ABC理論認為,情感(affect)、認知(cognition)和行為傾向(behavior tendency)共同構成了個體的態度,并且這三個維度不是孤立存在,而是相互影響的[5]。認知會對個體的行為傾向產生影響,因此可以推測家長的相關認知可能會對家長的管控行為產生影響。研究人員將家長關于停車場兒童行人安全的認知分為管控方式認知和風險因素認知,風險因素認知又細分為對兒童行人能力的認知和對兒童難以被駕駛員觀察的認知。綜合計劃行為理論和態度ABC理論提出基于拓展計劃行為理論的管控行為理論模型,并提出以下假設。
假設H5a:看護方式認知對態度有正向的影響;
假設H5b:看護方式認知對看護意向有正向的影響;
假設H5c:看護方式認知對看護行為有正向的影響;
假設H6a:兒童行人能力認知對態度有正向的影響;
假設H6b:兒童行人能力認知對看護意向有正向的影響;
假設H6c:兒童行人能力認知對看護行為有正向的影響;
假設H7a:兒童難以觀察認知對態度有正向的影響;
假設H7b:兒童難以觀察認知對看護意向有正向的影響;
假設H7c:兒童難以觀察認知對看護行為有正向的影響。
2.2 問卷設計與調查
(1)主觀規范(SN)
(2)態度(ATT)
使用個體對管控行為的積極或消極的評價性反應來表征態度,包括對喜歡厭惡的感受和利弊得失的看法。例如,“在停車場中,先讓兒童上車、再把行李放進后備箱,這種做法很麻煩(ATT4)”等。
(3)知覺行為控制(PBC)
知覺行為控制是指個體對在停車場中對兒童實施管控行為的難易程度的主觀感受。例如,“在停車場中,一直與孩子保持肢體接觸是一件比較容易的事,沒有什么事情可以阻礙我這么做(PBC3)”等。
(4)意向(BI)
使用個體在停車場中對管控兒童的具體行為的實施意愿來評估其管控意向。例如,“在停車場中和孩子一起行走時,回復朋友發來的消息(BI2)”。
(5)行為(BE)
總而言之,超聲心動圖與動態心動圖檢查在肥厚性心肌患者的檢查過程中 均具有重要的應用價值,可以更好的了解患者的心房情況,降低誤診的發生率,臨床應用價值較高。
使用個體在停車場中最近一個月的實際經歷來評估其管控行為。例如,“在停車場中行走時,我總是先步入車道,或者確定安全后再讓孩子步入車道(BI3)”。
(6)管控方式認知(MET)
通過測量個體對在停車場中是否應該實施某種管控行為的判斷,來評估個體對管控方式的認知。例如,“在停車場中行走時,家長應該一直牽著孩子的手(MET1)”。
(7)風險因素認知——兒童行人能力(AB)
通過測量個體對6~8歲兒童在停車場的行人行為和感知能力的認識,來評估個體對兒童行人能力的認知水平。例如,“兒童能夠理解車輛倒車燈、轉向燈等車燈閃爍的含義,并及時避讓車輛(AB2)”。
(8)風險因素認知——兒童難以觀察(PER)
6~8歲兒童在停車場中行走時是否容易處于駕駛員的視野盲區之內?通過測量個體對該問題的見解,來評估個體對兒童在停車場中難以被察覺到這一現狀的認知狀況。例如,“轎車里的司機,無法及時發現蹲坐在轎車附近的兒童?(PER1)”。
本次問卷調查以網絡調查為主。研究人員先將問卷輸入到“問卷星”網站上,再將問卷鏈接發送到朋友圈、群聊和微博等社交平臺上,并運用“滾雪球法”進一步地擴大受訪者群體。為了更好的把控答卷質量,研究人員還做了以下的工作:①設置測謊題,如“一般來說,糖嘗起來是甜的(本題選同意或非常同意)”;②刪除符合以下任一條件的答卷:a.受訪者未滿18歲、b.家中沒有機動車、c.家中沒有9歲以下的兒童;③剔除具有明顯缺陷(如規律選擇)的無效答卷。研究共獲得527份答卷,其中有效答卷為401份,答卷有效率為76%。
3 數據分析
最小偏二乘法結構方程模型(partial least squares structural equation modeling,PLS-SEM),常用于處理、檢驗結構模型和測量模型之間的關系。PLS-SEM通過同時對多個潛變量和觀測指標進行建模來表達結構模型和測量模型之間的關系。在使用PLS-SEM對問卷進行分析時,問卷的題項即為觀測指標,問卷的維度即為潛變量。PLS-SEM可以建立復雜的多變量結構模型[7],是選用PLS-SEM模型的主要原因。研究使用Smart-PLS V3.0對問卷進行分析。
3.1 信效度分析
(1)信度
為檢測問卷中潛變量與觀測指標的內部一致性,使用Cronbach'sα系數對問卷進行信度分析。如表1所示,在研究新編的問卷中,各潛變量的Cronbach'sα系數在0.702~0.814之間,均大于推薦值0.7[8],表明該問卷信度較高、問卷內部一致性良好。
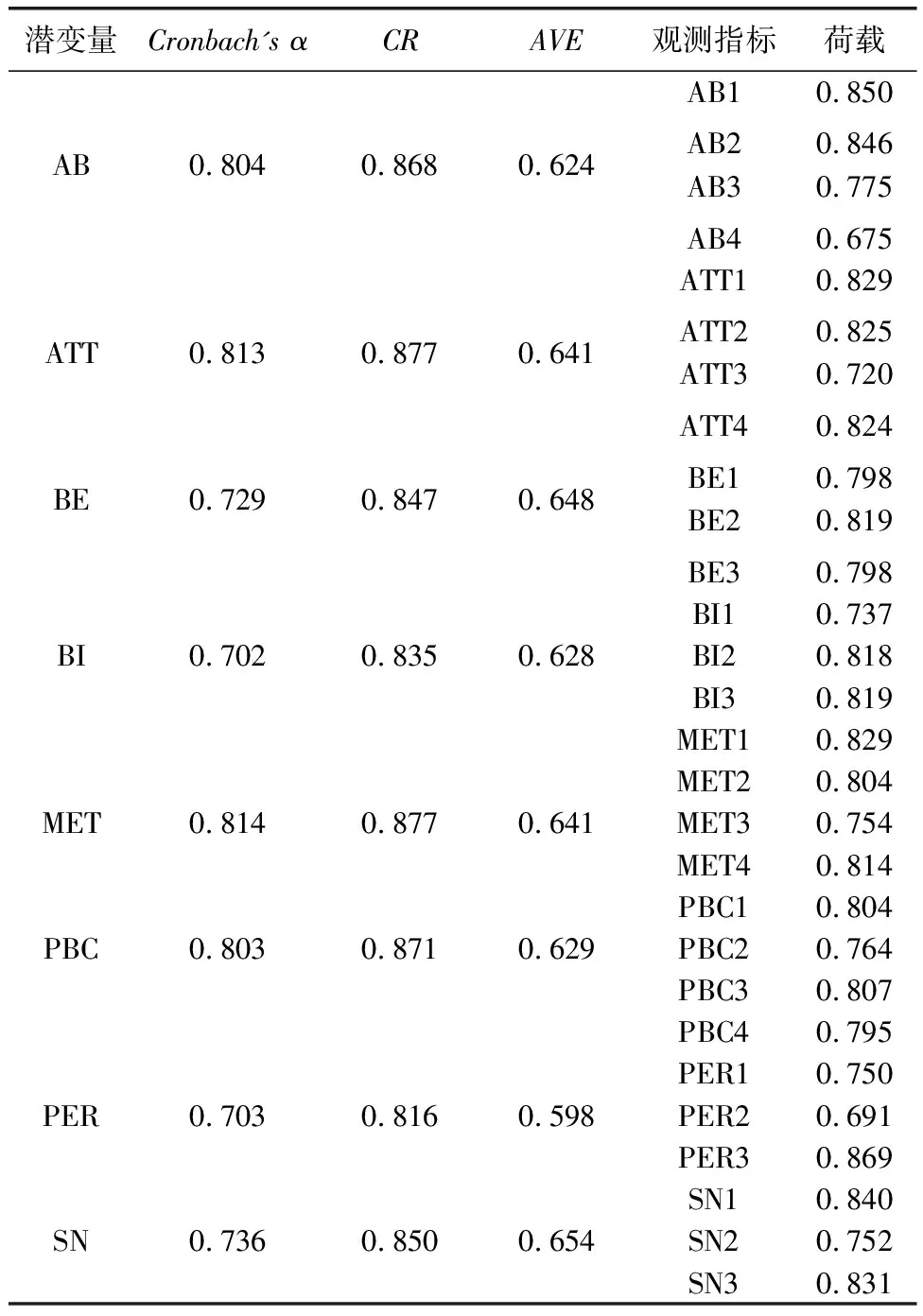
表1 問卷信度檢驗
(2)收斂效度
收斂效度又稱聚合效度(convergent validity),常用平均萃取變異量(Average Variance Extracted,AVE)、組合信度(Composite Reliability,CR)和載荷(Loading)這三個值來評估收斂效度[9]。如表1所示,研究中的觀測指標(題項)對潛變量(維度)的荷載在0.675~0.869之間,均大于推薦值0.6,說明觀測變量對潛變量的表征程度;CR取值在0.816~0.877之間,均大于推薦值0.7,說明新編制的問卷各維度下的題項組合信度較高,各維度內部題項均表征同一事物;AVE取值在0.598~0.655之間,均大于推薦值0.5,說明題項對維度差異性的解釋程度較高,各維度的收斂性良好。綜上,研究中新編制的問卷具有良好的收斂效度,各組題項都能對維度進行表征。
(3)區分效度
為檢驗問卷的區分效度,對AVE平方根和潛變量之間的相關系數[9]進行了比較。如表2所示,所有潛變量的AVE平方根都大于其所在行的其他值,表明各個題項與其所屬維度相關性較強,與其他維度的相關性較弱。由此可知,研究中新編制的問卷具有良好的區分效度。
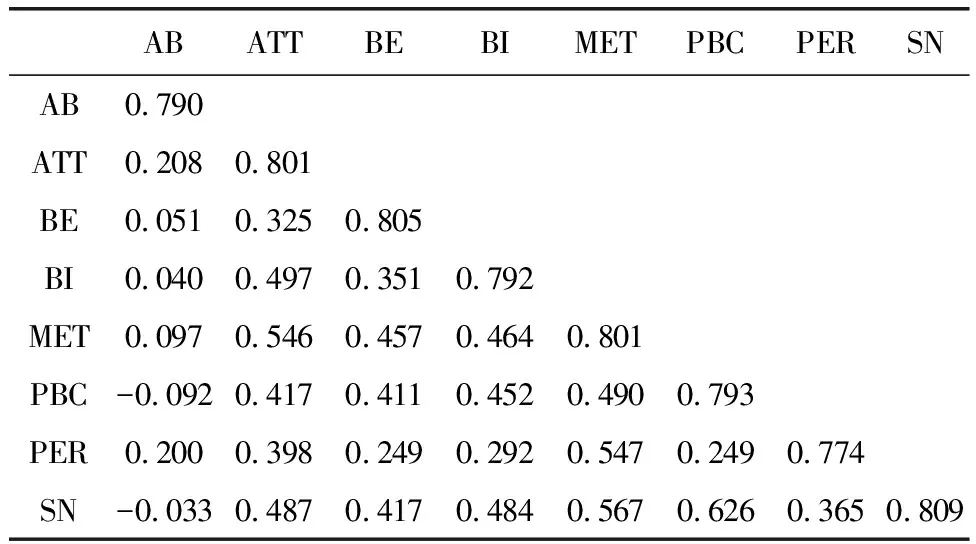
表2 問卷的區分效度
3.2 結構模型分析
使用Boostrapping檢驗技術驗證潛變量間的因果關系假設。如表3所示,除假設H6b、H6c、H7b和H7c顯著性較差,模型中其他的因果關系假設均顯著。
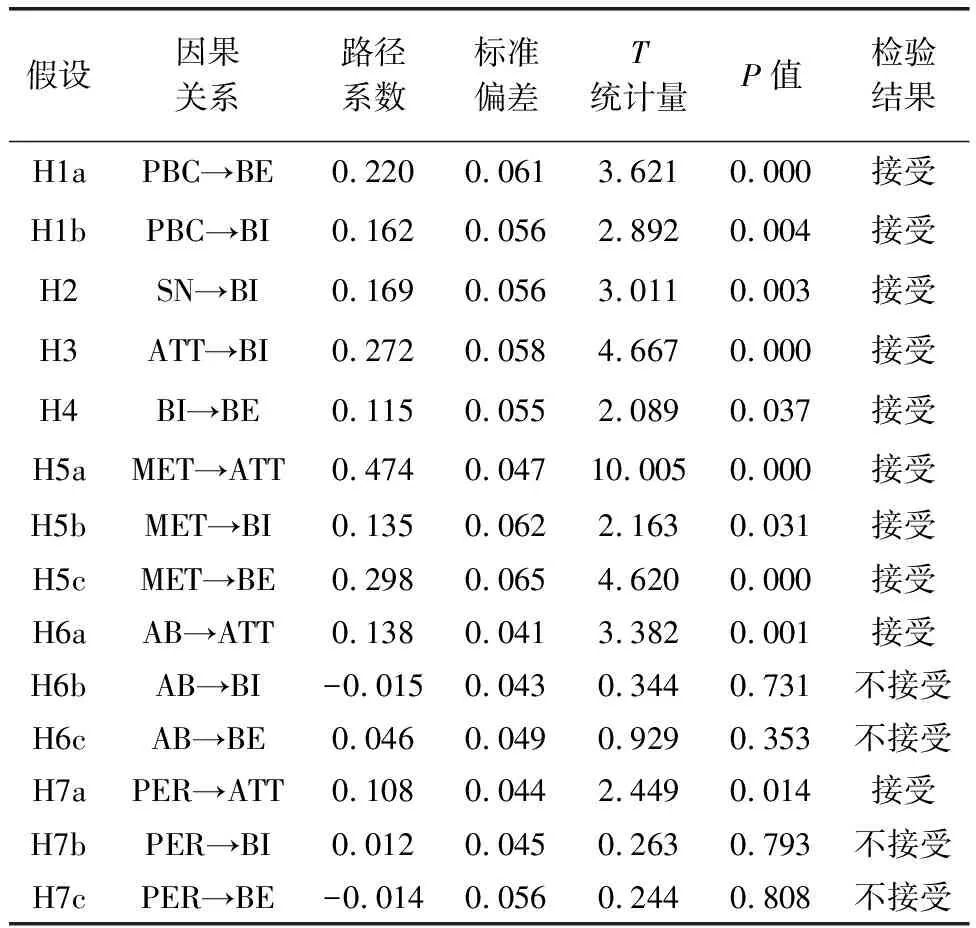
表3 假設檢驗結果
在家長管控行為結構模型中,各潛變量之間的既有直接影響,又有通過其他潛變量產生的間接影響。為了準確、全面地分析出家長管控行為的心理決策過程,需對各潛變量之間的直接影響、間接影響和總影響進行詳細分析,分析結果如表4所示。
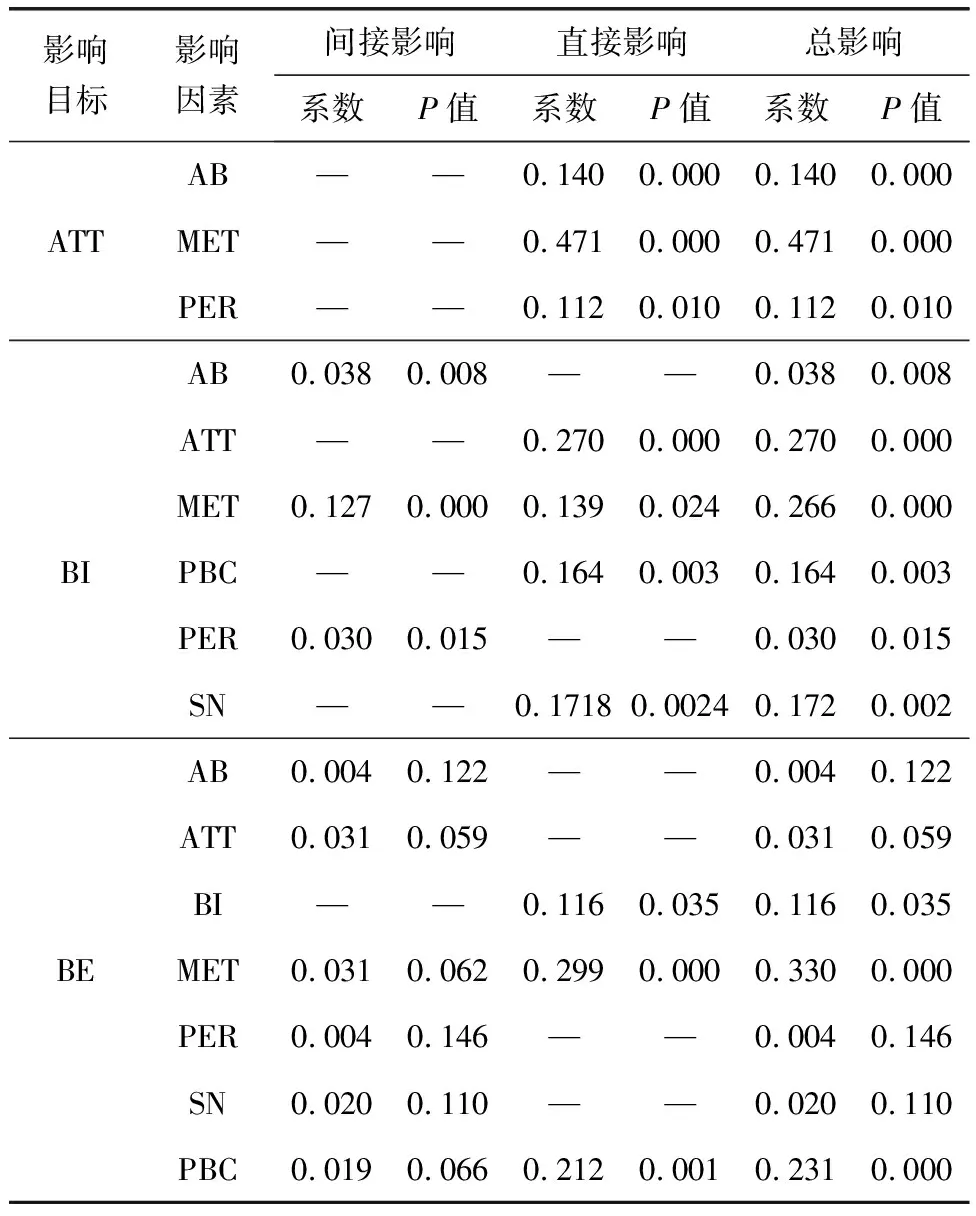
表4 各潛變量間的影響關系
行為態度、知覺行為控制和主觀規范對行為意向存在正向的影響,總影響系數分別為0.270、0.164和0.172,p<0.05;知覺行為控制和行為意向對管控行為具有正向的影響,影響系數分別為0.231和0.116,p<0.05。雖然行為態度影響管控行為的顯著性為0.059,略大于0.05,但行為態度對管控行為的影響依舊不可忽視。值得注意的是,在本次研究中主觀規范對管控行為的影響并不顯著。
兒童行人能力認知、兒童難以觀察認知和管控方式認知對行為態度的影響系數分別為0.140、0.112、0.471,p<0.05。至于認知對行為意向的影響,管控方式對行為意向的影響最大,影響系數為0.266;關于兒童行人風險因素認知(即兒童行人能力認知和兒童難以觀察認知)對行為意向的影響程度較小,總影響系數為0.068。只有對管控方式的認知可以對管控行為產生顯著的影響(影響系數為0.330,p<0.05),關于兒童行人風險因素認知對管控行為的影響均沒有統計學上的顯著性。
4 結 論
通過編制、發放問卷獲取數據,使用PLS-SEM對家長管控行為理論模型進行驗證,發現該模型具有良好的信度、收斂效度和區分效度,表明基于拓展計劃行為理論的管控行為理論模型可以用于預測家長在停車場中對兒童的管控行為。
進一步的分析表明,家長關于兒童行人風險因素認知,與行為態度有正向的影響,與實施正確管控行為的意向和具體的管控行為沒有直接關系。這表明,改變家長關于停車場兒童行人安全風險因素的認知,只能使家長關于管控行為的態度更加積極,但不會直接改變家長對實施某一具體管控行為的意愿,也不會對家長的某一具體行為產生影響。但是,家長關于管控方式的認知,對管控態度、管控意向和管控行為都有正向影響。因此,可以得出以下結論:只有當家長知道應該如何正確管控兒童時,家長對兒童行人安全的擔憂才能更好地轉化為實施正確管控行為的意愿,家長才能表現出更正確的管控行為。在未來針對家長管控行為的干預研究中,不僅需要提高家長對兒童行人在停車場中的安全風險的認識,更要向家長普及正確的管控方法。
研究在一定程度上填補了國內外在停車場兒童行人安全問題上的研究空白。研究結果可以為交通安全教育提供理論依據和實踐指導,對預防和減少停車場兒童交通事故、保障兒童行人安全具有重要意義。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
少兒美術·書法版(2021年11期)2021-10-20 06:23:28
少兒美術·書法版(2021年8期)2021-10-20 06:08:10
當代陜西(2021年2期)2021-03-29 07:41:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
雜文選刊(2016年7期)2016-08-02 08:39:56
中國塑料(2016年3期)2016-06-15 20:30:00
小天使·一年級語數英綜合(2016年6期)2016-05-14 12:21:05
通信電源技術(2016年3期)2016-03-26 07:13:38
小學生·新讀寫(2006年6期)2006-06-14 05:16:24
