國內仿形技術在農用機械上的應用分析
2023-06-15 07:52:13王金武楊會民陳毅飛周欣蔣永新張佳喜
中國農機化學報 2023年4期
王金武 楊會民 陳毅飛 周欣 蔣永新 張佳喜

摘要:農業的發展離不開農機,為滿足農用機械自動化及優良的作業性能,各類技術層出不窮,其中就有仿形技術。仿形技術對農用機械在作業時的穩定性、準確性和作業效果等各方面起到重要作用,同時也對農機的優化起到關鍵作用。本文對現階段國內仿形技術的應用進行分析,將應用到農用機械上的仿形技術分為主動仿形技術和被動仿形技術兩大類,同時總結歸納兩種仿形技術各自的優缺點。被動仿形技術成本較低,一般為純機械仿形,結構簡單且容易檢修,但受地面環境影響較大,精確度和靈敏度都不高。主動仿形技術水平要求較高,一般需要電、液配合工作,仿形精度及穩定性都較高,但成本較高而且農用機械領域還沒有大范圍推廣。由于田間環境復雜多變,目前仿形技術中的滯后問題依然存在、傳感效果比較一般以及調控起來還相對困難等問題仍然急需解決。隨著精尖技術的加入,仿形技術正在朝著更加智能化、簡易化的方向穩步發展。
關鍵詞:仿形技術;自動化;調控;智能化;農用機械
中圖分類號:S22
文獻標識碼:A
文章編號:2095-5553 (2023) 04-0031-09
Abstract: Agricultural development is inseparable from agricultural machinery, in order to meet the automation and excellent performance of agricultural machinery, various technologies emerge in an endless stream, among which there is copying technology. Copying technology plays an important role in the stability, accuracy and operation effect of agricultural machinery in operation, and also plays a key role in the optimization of agricultural machinery. This paper analyzes the application of copying technology in China at present, divides the copying technology applied to agricultural tools into active copying and passive copying, and summarizes the advantages and disadvantages of the two copying technologies. Passive copying technology has low cost, is generally pure mechanical copying, simple structure and easy maintenance, but is greatly affected by the ground environment, the accuracy and sensitivity are not high. The level of active copying technology is relatively higher, and generally requires electrical and hydraulic cooperation, with high copying accuracy and stability, but the cost is higher and the field of agricultural machinery has not been widely promoted. Due to the complex and changeable field environment, the lag problem of copying technology still exists in the current, the sensor effect is relatively general, and relatively difficult to control and other problems are still urgently needed to solve, although copying technology has been developed in the field of agricultural machinery, but there is still a long way to go in order to realize the intelligent and simple copying technology. With the addition of precision technology, copying technology is developing steadily towards a more intelligent and easy direction.
Keywords: copying technology; automation; regulate and control; intelligent; agricultural machinery
0 引言
仿形技術對農用機械向自動化、智能化發展有著非常重要的意義。目前國內擁有的農用機械裝備涉及眾多領域,絕大多數農作物從播種開始一直到收獲整個過程都可通過機械設備來完成,但是由于田間環境和地面質量有所不同而導致農機在不同環境下作業效果不穩定等問題,而這些弊端將會對農作物的生長和豐收產生一定的影響。
為了解決由于田間環境而導致農業機械作業不佳的問題,仿形技術被應用的越來越多,目前我國的仿形技術總的可以分為主動仿形和被動仿形兩大類型。被動仿形的結構較為簡單,應用于環境一般的情況下,一般是由純機械部件構成且需要有仿形輪緊貼地面。主動仿形的主要組成部分為機械傳感機構、升降機構及液壓執行系統等,需要的技術要求比較高,適用于環境比較惡劣的田間。兩種仿形技術的應用使農機在田間作業時的穩定性和準確性等得到保障,對農機自動化進程具有一定的推動作用。
我國的仿形技術最早是從20世紀50年代才開始萌芽的。當時只有液壓的仿形,而且基本上所有的技術和設備都是靠進口。當時一些機械廠主要進口的是蘇聯等國的仿形機床,而且這些機床一直沿用至今。當進入到60年代,長征和長城這兩個當時國內最大的專業仿形機床廠的相繼成立,意味著我國的仿形技術進入全新的發展階段,即已經不依賴國外進口且能夠自主研發生產。尤其是進入到70年代的中期之后,由于我國科技水平的突飛猛進,眾多高端技術被廣泛應用,仿形技術也得到了前所未有的飛躍式發展[1]。經過科研人員的努力和國家的重視,進入90年代后各類仿形裝置層出不窮。隨著這么多年的不斷完善發展和創新,新時代的仿形技術已經廣泛應用到機械加工、工程機械、生物科學等眾多領域,并且一度扮演著較為重要的角色,在農業機械領域,對播前準備、作物播種和作物收獲等農作物整個生長周期的各方面工作均被頻繁應用。
近些年來,在加速發展農業機械化的整個進程中,各種各樣的問題和挑戰都需要去面對和解決。農機的發展離不開土地和農作物,由于土地的凹凸不平或作物枝葉生長的不規律,一般農機的作業性能、穩定性等都會大打折扣,從而影響農機的作業效果和作物的產量,這就使許多農機在田間作業時面臨較大挑戰。目前隨著對仿形技術的不斷完善和參與,上述問題都得到了很大的改善,可以有效解決由于仿形問題帶來的困擾,使農機可以更好達到預期的作業效果。
本文主要通過梳理國內應用仿形技術的各農機中的典型機型,分析各農機中仿形裝置的結構特點及技術,簡述仿形裝置安裝在農機上的具體作用,最后總結了兩種不同類型仿形技術的優缺點和意義。
1 被動仿形技術在農機上的應用
被動仿形具體是指農業機械在工作時能夠一直使限深裝置保持受力平衡狀態,使需仿形的主要部件的作業深度可以保持一致,是控制作業深度的一種較常見仿形方式,這類仿形主要適用于旱地農機作業。農用機械中使用被動仿形技術典型的有殘膜回收機的主要部件仿形、旱地移栽機仿形等。被動仿形的整體結構是比較簡單的,其結構一般是由機架、下壓彈簧、擺動機構以及可手動調節的仿形部件等構成。其中手動調節的仿形部件有仿形地輪、鎮壓輪以及其他可直接接觸地面的滾動部件等。
1.1 被動仿形技術在油菜撿拾裝置上的應用
油菜的主要機械收獲方式是分段收獲,在分段收獲環節中,油菜撿拾器為撿拾脫粒環節的主要工作部件,其性能的好壞對整機的作業質量來說至關重要。仿形裝置在油菜撿拾裝置上的應用還較少,2020年江濤等[2]設計了一套仿形裝置,由于油菜撿拾裝置的結構尺寸特殊,齒帶的撿拾器多采用與割臺蝸殼鉸接,仿形輪與割臺蝸殼形成撿拾機構的前后支撐,這樣撿拾器可以繞著鉸接點進行轉動,便于調整撿拾姿態。此仿形裝置采用整體仿形,目的是為了解決機器在田間工作時,撿拾器出現的振動和彈跳現象,造成漏撿狀況。加入整體仿形結構后,收獲的含雜率明顯減低,撿拾率明顯增高,作業時整機的振動和彈跳得到了有效控制,保證了撿拾器的作業質量和作業效率。
1.2 被動仿形技術在移栽機上的應用
部分移栽機采用被動仿形的方式,此類移栽機的仿形裝置在作業前,為了保證作業時的仿形靈敏度和初始栽培深度,需要根據作業田區的具體情況來有效調節限深地輪的高度和彈簧預緊力大小,如果機型是懸掛式的,為保證較合適的栽苗角度,還需要適當調節拖拉機3點懸掛上的拉桿長度,其結構如圖1所示。作業過程中,栽植器隨牽引力、自身重力和多種外力的共同作用隨著地面的起伏進行仿形栽苗,這就有效地實現了植苗過程中對栽深一致性的穩定控制[3]。
國內外采用類似被動仿形原理的移栽機機型有很多,國內較出名的如2ZQ型鏈夾式移栽機、2YZ1型開溝導苗管式煙草移栽機等都是采用的被動仿形原理。這種被動仿形全是由機械部件構成,仿形的技術原理也較為簡單,成本相對來說要低很多,并且可以在一定范圍內有效控制植苗的深度,能夠較好地達到作業要求[4]。
1.3 被動仿形技術在棉花打頂機上的應用
棉花打頂工作是整個棉花收獲過程中必不可少的步驟之一,棉花打頂效果的優良與否可直接影響到棉花生長發育的好壞。胡斌等根據要求開發了3MDZK-12型組控式單行仿形棉花打頂機。這款棉花打頂機的研究與開發,有效地解決了無論是在行內或者行間棉花頂部作業的時候,棉花機械打頂能夠獨立仿形這一困難,同時也很好地解決了在持續提供動力的情況下,棉花打頂機中全部的切割器能夠根據棉株的相對高度的高低自主完成升降仿形工作這一技術難點。在棉株有較高整齊度并且地面沒有很明顯凹凸起伏的時候,這款棉花打頂機能夠持續高效作業并且可以保持穩定可靠。
以上述棉花打頂機機型為例,其應用的仿形技術也是純機械被動仿形。此機由懸掛架、套筒式平衡仿形機架、滾筒式切割器、升降控制機構、扶禾器以及齒帶組合的傳動系統等多個部件和機構組成。其整體結構如圖2所示。此機在進行工作啟動時,聯軸器會將拖拉機所傳入的動力直接傳送至下一級機構變速箱,經變速箱的處理后再經過一對錐齒輪的增速將動力變速輸出,隨即小帶輪轉動皮帶驅使大帶輪進行高速旋轉動作,緊接著全部位于6組滾筒式切割器上邊的帶輪被6個皮帶輪帶動進行高速旋轉,這樣使全部滾筒都高速旋轉工作。另外,扶禾器的作用就是把雜亂無章的棉花枝桿、枝葉聚攏到一起,將其扶至切割器的可切割范圍之內,隨即由裝在滾筒之間的4把切割刀具通過高速旋轉切割掉棉株的枝頂,完成打頂作業。
為了使結構更加緊湊且作業效果更加良好,6組滾筒切割器通過平行四桿機構各自分別套在中間軸和機架的固定軸上。而中間軸帶輪以及平行四桿機構一起安裝在中間軸上,這樣減少傳動裝置的安裝,使結構更加簡單。機器工作時,操作員可以通過操縱桿和升降踏板來控制滾筒切割器,令其可以在動力不斷的情況下向下端移動,從而實現在打頂工作時,6組切割器可以互不影響,各自獨立仿形。
使用套筒將仿形機架的主梁與懸掛架的下端連接起來,利用卡板限制上端前后移動,這樣可以起到限位的作用,因為需要承受得住拖拉機的牽引力,上端和下端之間可以以套筒為軸進行左右隨意擺動,從而可以確保機器和內部裝置高速工作的時候,機架可以保持相對穩定的同時能夠相對于地面隨機仿形。
1.4 被動仿形技術在殘膜回收機上的應用
作業過程中,由于地面的高低起伏和整機的顛簸不定,殘膜回收機夾指的入土得不到保障,時深時淺或者入土困難,這就造成了殘膜的少收漏收,致使收膜量達不到最大化,導致整體殘膜回收率不穩定[5-9]。為解決上述問題,在殘膜回收裝置上安裝仿形機構是必不可少的一部分[10]。夾指鏈式殘膜回收機的仿形方式也屬于純機械式被動仿形,而且采用的是單鉸接式機械仿形機構,此仿形機構大量應用于播種機械的開溝作業,在此之前,還沒有廣泛應用于殘膜回收機中[11-16],但近年來被應用的越來越多。
構成此仿形裝置的機構有仿形架、仿形輪、切膜圓盤、壓緊機構以及刮土板等,其中仿形輪的一邊安裝有切膜圓盤,其可以將地面上邊的殘膜切割成絲帶狀的同時也可以起到仿形作用,而壓緊彈簧本身所產生的預壓力可以使仿形輪等仿形機構一直緊緊地貼著地表工作。
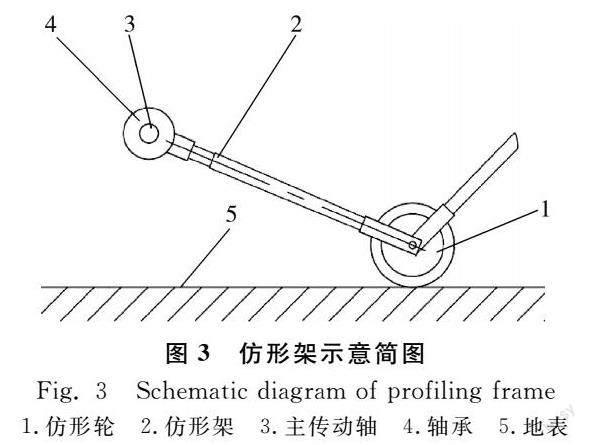
1.4.1 仿形架
仿形架要與主傳動軸相連接,連接方式為軸承連接(需2個雙面球軸承)。同時仿形架的前端鉸接在主動軸上邊,主動軸與機架相連接,其后端則與切膜圓盤、仿形輪以及收膜架的下端同軸相接。機器在工作的過程中,由于仿形架的拖曳,仿形輪則能夠跟隨整機在地表上邊向前自由滾動,并且會隨著壓緊彈簧受的壓力大小上下浮動,即可實現對地面高低起伏程度的仿形。仿形架的結構如圖3所示。
1.4.2 仿形輪與切膜圓盤
機具在工作的過程中,仿形輪由于壓緊彈簧的預緊力能夠緊貼于地表進行滾動,它的主要作用是要確保同軸一側的下收膜鏈輪在途經凹凸不平的地面時,確保下收膜鏈輪能夠同地面之間的距離在合理的間距范圍中,從而可以保證回收裝置的夾指在夾取殘膜的時候能夠輕松有效入土,且入土深度能夠保持相對穩定。切膜圓盤固定聯接于仿形輪的側面,同時切膜圓盤的內圈可以作為仿形輪的輪輻,這樣安裝設計可以契合機具的空間大小,令結構更加緊湊、更加簡單。這樣切膜圓盤在進行整個切膜工作的過程中就能夠實現對地面的仿形。此外,切膜圓盤的側面安裝的有碎土齒,以便更好地疏松位于地表中的殘膜。
1.4.3 壓緊機構
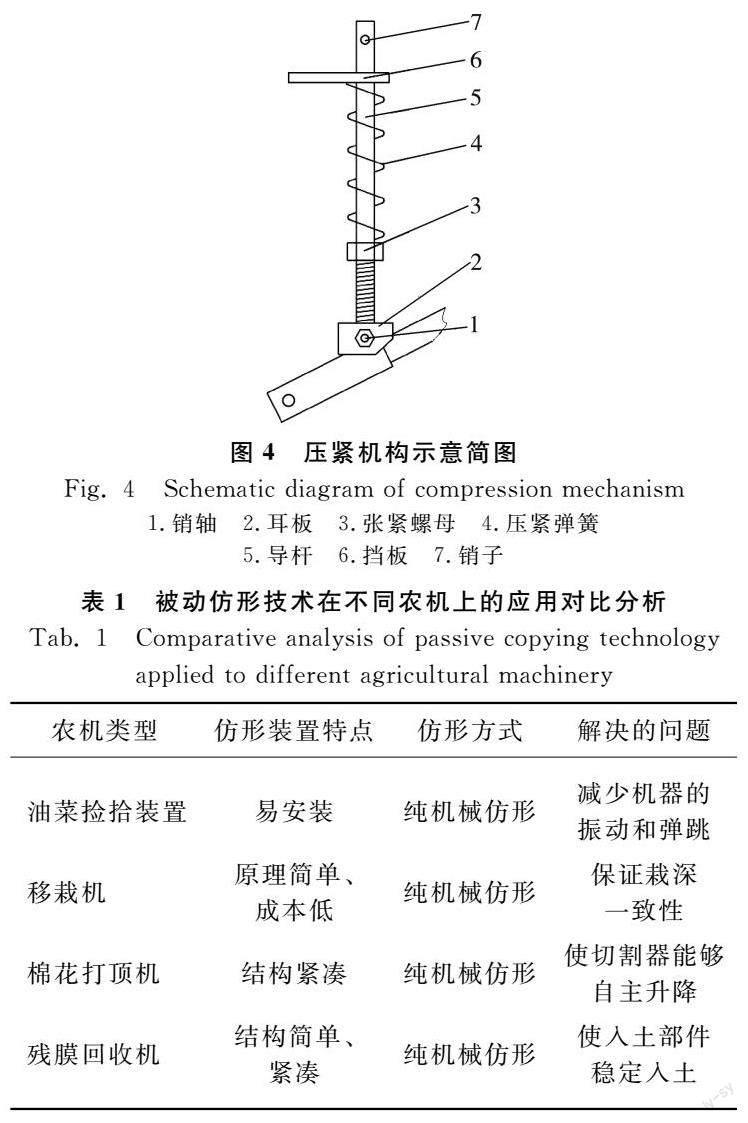
將切膜圓盤和仿形輪整合到一起,為了確保整體收膜的質量,在田間進行收膜作業時,要保證切膜圓盤可以正常地切入地面,才能夠有效地將地表殘膜切成帶狀,這樣收膜時會比較方便,更需保證切膜圓盤進入地面的同時仿形輪也能夠緊壓在地表進行滾動。因為田間環境比較復雜,大多地表不平整,切膜圓盤的入土深度一旦達不到有效深度,仿形輪就會被迫離開地表,這樣的話會導致仿形工作失效,就有可能造成夾指不能充分有效地進入土壤夾取殘膜的結果。安裝壓緊機構的目的是要確保仿形輪可以穩定可靠地緊壓在地面,導桿上邊安裝的有壓緊彈簧,導桿的上部與機架相連接,壓緊機構的下壓力可以通過張緊螺母來進行調節,從而能夠調節壓緊機構對仿形輪所施加的壓力大小。壓緊機構的結構如圖4所示。
1.5 被動仿形技術在不同農機上的應用對比分析
被動仿形技術在不同農機上的應用對比分析如表1所示。
1)? 被動仿形結構簡單,由純機械結構組成,成本較低,能夠更好地接觸地面,可直接進行仿形工作。
2)? 被動仿形受土壤軟硬程度變化及地塊的整地質量影響較大。如果作業地塊的耕地質量或整地質量較差,就會造成土壤表層的軟硬程度有差異,則將引起土壤表層的支撐力不夠穩定,這樣對農機的仿形能力會產生一定程度的影響。
3)? 作業時,被動仿形動作相對滯后。從理論上而言,滯后誤差應當與水平距離基本成正比關系,但是由于農機行進速度、農機結構的工藝等種種因素,這種滯后誤差幾乎沒有辦法消除,對仿形的精度會產生比較大的影響。
2 主動仿形技術在農機上的應用
目前的主動仿形大部分采用機械傳感和液壓執行相結合的方式來實現,在水田、丘陵以及部分旱地等地形環境較差的田間應用較多。這種仿形方式的主要組成部分為機械傳感機構、升降機構及液壓執行系統等,機械傳感機構大致包括仿形輪、仿形拖板及推拉連桿等,而液壓執行系統則包括電磁閥、仿形閥及升降油缸等。
主動仿形工作原理大致為:
1)? 通過機械傳感機構和地表相接觸來感應地面的高低起伏變化,將地面的變化傳遞到液壓系統,隨后液壓系統做出相應反應驅動油缸實施伸縮動作,從而實現仿形動作。
2)? 通過角度傳感器、激光傳感器、陀螺儀等一系列傳感裝置對機器作業時相對于地面或其他參照物的變化等做出一系列反饋,通過已經編程好的設備驅使電磁閥體做出響應,從而驅動油缸的伸縮升降等,從而實現仿形動作[17-19]。
2.1 主動仿形技術在花生收獲機上的應用
花生收獲機中所應用的仿形技術主要是解決其挖掘鏟挖掘深度的問題,在作業時需要保證挖掘深度一直一致,這樣可以防止漏挖、挖破或者破壞土質等問題的發生。代表機型為4HLB-2型花生聯合收獲機,其地面仿形裝置如圖5所示。超聲波傳感器測量距離時具有高效率、高精度的特點,是較為常用測量距離的工具之一,由于田間地表的環境相對比較復雜多變,從超聲波的傳播理論出發,超聲波在正常無遮擋途徑情況下傳播時,屬于正常無障礙傳播,但如果傳播過程中遇到其他物體,且碰到的物體直徑小于超聲波半個波長的時候,聲波就會把障礙物繞過去而繼續往前傳播,就是產生繞射現象[20]。接觸地表的仿形機構直接焊接于清土裝置一旁的護梁上邊,這樣設計主要是為了花生收獲機在正常作業時能夠有效實現自動限深的效果,超聲波傳感器發出來的聲波需要直接射到地面仿形機構上面,這樣聲波傳播過程中就可以躲過花生植株體,從而避免繞射現象的發生,因而測量精度就會更高,作業更有效。
地面仿形機構由地輪、導向管、焊接板、壓簧、長螺桿以及測量基準板等組成。壓簧嵌套于長螺桿上,長螺桿位于導向管a和導向管b的內部,跟隨地面的起伏不定,導向管b在導向管a內上下不停滑動,兩個導向管中間安裝有六角頭螺栓,其安裝目的是限制導向管b在長螺桿軸線方向旋轉的自由度,以確保實現更加有效的導向作用。
機具工作時,測量超聲波發射出來的一端至地面仿形機構之間距離,就能夠間接地得到地表的凹凸程度和起伏變化,已經測量得到的挖掘深度變化值會將輸入到模糊PID控制器中,模糊PID控制器中有模糊控制規則表,將此表當作參考表,把測得的數據與其進行對照,如若需要發出相應動作,則可以由控制器發射相應控制信號至電磁閥,隨后用電磁閥去控制油缸進行伸縮動作,這樣整個循環反饋就可以完成相對應的控制任務。
2.2 主動仿形技術在自動噴霧機上的應用
風送噴霧裝置是農作物噴霧作業領域中最為重要和突出的技術裝備之一,多年來得到了廣泛的應用,擁有非常好的應用前景[21]。可是對于一般果園使用傳統的風送式噴霧機在對果樹等施藥的過程中,其會連續不間斷噴藥,這就很容易造成農藥的浪費和環境污染的嚴重后果,最重要的是還會致使農產品因噴藥過量而受到污染,影響到消費者的身體健康[22-23]。
此自動仿形噴霧機所采用的仿形技術是主動仿形中的第2種仿形方式。把噴霧機和探測傳感器(紅外線傳感器等)結合起來,作物或雜草的冠層特征一經改變,機器則可以自動實時改變噴霧參數,比如可以自動調節噴頭噴藥的流量或風機的風量等[24],這樣能夠達到按需施藥的目的,從而不僅僅提高了農藥的有效利用率,而且還有效降低了因為農藥的流失對環境造成的危害[25]。
2.3 主動仿形技術在玉米播種機上的應用
精密播種是提高玉米產量的關鍵[26]﹐要實現精密播種就需要對玉米種子的粒距一致性、播深一致性提出更高要求[27]。播深影響玉米的出苗時間、出苗率、玉米冠層結構以及光合特性,進而影響到玉米的產量[28-31]。在特定的土壤環境中,保持合適且一致的播深和壓實度,就能夠確保種子與土壤較良好的接觸,使種子更加易于從土壤中汲取所需水分,對種子的快速出苗產生較大影響[32-34]。土壤的質地變化與作業地面的地形變化是影響播深變異性的主要因素之一[35]。目前,在玉米播種機上大多是采用單體仿形技術來達到可以精確仿形的效果,并且通過下壓力控制技術能夠進一步提高播種單體對田間土壤質地變化的適應性[36]。在直接測量控制方面,蔡國華[37]、Wen[38]采用超聲波傳感器對播深進行實時監控檢測,并且還設計了控制系統,通過液壓系統來調節播深。趙金輝等[39]設計出了利用位移傳感器作為傳感機構的播深控制系統,通過液壓執行系統來靈活調節四連桿仿形機構對地形的感知,并做出相應的仿形動作,以這樣的方式對播種深度進行有效調節,測量得到的播種深度的穩定性系數到達90%以上。
玉米播種機播深和壓實仿形技術通過實時調節施加在四連桿仿形機構上的液壓力調節下壓力,實現播深的間接控制,通過實時調節鎮壓機構處的彈簧伸長量調節鎮壓力,從而間接控制壓實度,提高玉米播深合格率和一致性,并保持適宜的壓實度,可以確保種子和土壤的良好接觸,這樣有效地為玉米在苗期階段的成長提供了保障,對其產量的提升有較大意義[40]。
整個系統主要是由測控系統、液壓系統和用于播深壓實的機械機構三個部分組成。測控系統主要是由下壓力傳感器、油壓傳感器、鎮壓力傳感器、車載終端以及PLC控制器等組成,這些傳感器和構件等各司其職,共同協作。播深和壓實度綜合控制系統的結構框圖如圖6所示。
在限深塊上安裝下壓力傳感器,限深塊帶有孔,與下壓力傳感器鉸接,限深塊的外壁與限深塊安裝座孔的內壁之間留有空隙,限深輪拐臂所產生的作用力向上傳遞到限深塊上,然后限深塊可對下壓力傳感器產生作用力,這樣下壓力傳感器可測得限深塊和限深輪拐臂之間的作用力,即為下壓力。下壓力傳感器的安裝方式如圖7所示。
2.4 主動仿形技術在不同農機上的應用對比分析
主動仿形技術在不同農機上的應用對比分析如表2所示。
1)? 主動仿形系統可以在一定程度上一直保持作業穩定,仿形精度比較高,反應時間可按需隨意調節,結構也較為簡單,整個仿形動作也更加主動,滯后問題也得到大大改善。
2)? 對所有農機而言,國內主動仿形技術還不夠成熟,同時因為技術要求較高、成本較高,在農用機械中并沒有大范圍推廣。但隨著智能化時代的到來,對主動仿形技術有了更深入的研究,主動仿形也將被應用得越來越多。
3 存在問題
1)? 被動仿形主要是由純機械機構構成,作業過程中的精度以及仿形效果會比較差,并且安裝上去之后將不可再控,根據要求不同,需要頻繁調試,對于一套裝置是否可以適用多種地形還需要深入研究。
2)? 主動仿形中雖然利用電—液控制大大改善了仿形的滯后問題,但由于農機行進速度、地形狀態、液壓系統的響應靈敏性等各種因素依然存在滯后問題,針對精準快速控制還有待改善。
3)? 目前主動仿形中應用的傳感方式主要是角度傳感器和陀螺儀,安裝在農用機械上的實用效果還不是太理想,是否可以利用其他精度更高的傳感方式令仿形效果更好,此問題也還有待研究。
4)? 主動仿形中的電—液配合控制對部分農機操作者來說技術難度相對較高,按照所需控制要求不能對仿形參數進行正常調控,因此針對主動仿形系統的操作簡易化、輕松化還應加強研究。
4 發展趨勢
1)? 目前由于考慮到對于仿形精度和仿形質量要求較高,在被動仿形技術的基礎上添加各種類型的控制系統,使其過渡為較為完善的主動仿形技術。在此過程中,還需繼續研究探索,在原有的基礎上添加合適的精尖技術,如選取更加適合的傳感方式,使其與主動仿形技術較好的結合,更加縮短信號傳遞所需時間,實現更加精準快速地控制,這樣可以將仿形技術的優點發揮到最大化。
2)? 當前主動仿形將配套電控系統廣泛引入其中,采用多種類型的電控傳感器將地形凹凸變化等轉換為電信號,經過控制器的運算后,再經信號放大電路直接傳遞給電—液轉換機構,隨后使液壓執行機構來驅動部件執行相對應的伺服動作。這樣的仿形結構也不是很復雜,調試起來也比較方便快捷,響應速度更加快,并且可以根據不同算法(如模糊PID)對農機主要部件進行更加精準的位置控制,對農用機械自動化進程的加速有著重要意義。
3)? 隨后在仿形技術方面,需在電—液配合的基礎上加入更加便捷的控制調節裝置,如控制面板等控制技術,使整個仿形技術在參數調節、反應時效等問題上得到較為明顯的改善,對于不同地形、不同環境可以隨意調節反應時間等參數,就可以進一步改善農機在作業時的穩定性以及其本身的功能,也可以使整個系統操控起來變得簡單快捷。仿形技術也在朝著智能化、簡易化方向穩步發展。
5 結語
被動仿形適合用于農機作業類型中的露地作業,此類仿形結構相對更加簡單,調試起來也更加簡單方便。如果作業的田間地塊沒有較大凹凸起伏且整地質量較好,機具工作能力和加工的質量、精度也比較高,那么應用到被動仿形技術的農機,可以在人工參與的情況下達到較好的作業效果。
隨著液壓系統的完善與發展,主動仿形也在逐步完善及應用。通過對原理和結構的深入研究和大量試驗、對機構的不斷改進和優化、對液壓系統的響應靈敏度進行更加穩定的控制,仿形傳感機構信號的傳遞效率有較明顯的提升,同時也大大改善了在工作過程中農業機械的穩定性和可靠性,使農機操作和維護起來更加簡單,間接提升了農作物的產量,從而使主動仿形技術得到逐步完善和更廣泛的應用。
仿形機構的研究與發展會快速推動我國農業機械向自動化、智能化發展,大大改善了農業機械作業性能,對農機作業效率及作物的收成有重要意義,對農業機械的優化也提供了巨大幫助。隨著智能化時代的到來,仿形越來越成為機械設備中必不可少的技術,并且對其研究將會愈加深入。
參 考 文 獻
[1] 凌國平. 我國仿形技術發展和使用的調查分析[J]. 鎮江船舶學院學報, 1990, 4(1): 86-95.
[2] 江濤, 關卓懷, 梁蘇寧, 等. 齒帶式油菜撿拾器仿形減振裝置設計與試驗[J]. 農業機械學報, 2020, 51(11): 148-157.
Jiang Tao, Guan Zhuohuai, Liang Suning, et al. Design and experiment of profiling and damping device for rapeseed tooth-belt pickup [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(11): 148-157.
[3] 白曉虎, 李芳, 張祖立, 等. 基于ADAMS的免耕播種機仿形機構彈簧參數優化[J]. 干旱地區農業研究, 2014, 32(6): 268-272, 278.
Bai Xiaohu, Li Fang, Zhang Zuli, et al. Parameter optimization for the profiling mechanism spring of no-till planter based on ADAMS [J]. Agricultural Research in the Arid Areas, 2014, 32(6): 268-272, 278.
[4] 袁文勝, 吳崇友, 于修剛, 等. 粘重土壤條件下油菜移栽機械化研究前景初探[J]. 中國農機化, 2011(1): 69-71, 77.
Yuan Wensheng, Wu Chongyou, Yu Xiugang, et al. Preliminary study on the researching prospect of rape transplanter in heavy soil conditions [J]. Chinese Agricultural Mechanization, 2011(1): 69-71, 77.
[5] 侯書林, 胡三媛, 孔建銘, 等. 國內殘膜回收機研究的現狀[J]. 農業工程學報, 2002, 18(3): 186-190.
Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of research on plastic film residue collector in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2002, 18(3): 186-190.
[6] 趙海軍, 史建新. 殘膜回收工藝探討[J]. 中國農機化, 2004(6): 68-71.
Zhao Haijun, Shi Jianxin. Discussion on technology of collecting plastic film residue [J]. Chinese Agricultural Mechanization, 2004(6): 68-71.
[7] 張東興. 殘膜回收機的設計[J]. 中國農業大學學報, 1999, 4(6): 41-43.
Zhang Dongxing. Research and design on collector of used plastic film on farm field [J]. Journal of China Agricultural University, 1999, 4(6): 41-43.
[8] 那明君, 董欣, 侯書林, 等. 殘膜回收機主要工作部件的研究[J]. 農業工程學報, 1999, 15(2): 112-115.
Na Mingjun, Dong Xin, Hou Shulin, et al. Research on main components of the machine for retrieving the used plastic film after harvesting [J]. Transactions of the Chinese Society of Agricultural Engineering, 1999, 15(2): 112-115.
[9] 王學農, 史建新, 郭俊先, 等. 懸掛式棉稈粉碎還田摟膜機摟膜機構的設計與試驗研究[J]. 農業工程學報, 2008, 24(1): 135-140.
Wang Xuenong, Shi Jianxin, Guo Junxian, et al. Experimental study and design on film raking mechanism of hanging film raker with cotton stalk crushing and returning to field [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(1): 135-140.
[10] 王科杰, 胡斌, 羅昕, 等. 殘膜回收機單組仿形摟膜機構的設計與試驗[J]. 農業工程學報, 2017, 33(8): 12-20.
Wang Kejie, Hu Bin, Luo Xin, et al. Design and experiment of monomer profiling raking-film mechanism of residue plastic film collector [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(8): 12-20.
[11] 姚宗路, 王曉燕, 高煥文, 等. 小麥免耕播種機種肥分施機構的改進與應用效果[J]. 農業工程學報, 2007, 23(1): 120-124.
Yao Zonglu, Wang Xiaoyan, Gao Huanwen, et al. Improvement and experiment on the device for separate application of fertilizer and seed for no-till wheat drill [J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(1): 120-124.
[12] 蔣金琳, 龔麗農, 王明福. 免耕播種機單體工作性能試驗研究[J]. 農業工程學報, 2000, 16(5): 64-65.
Jiang Jinlin, Gong Linong, Wang Mingfu. Study on the working performance of the no-tillage planter unit [J]. Transactions of the Chinese Society of Agricultural Engineering, 2000, 16(5): 64-66.
[13] 張晉國, 高煥文. 免耕播種機新型防堵裝置的研究[J]. 農業機械學報, 2000, 31(4): 33-35.
Zhang Jinguo, Gao Huanwen. Study on the strip chopping anti-blocking mechanism [J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35.
[14] 范旭輝, 賈洪雷, 張偉漢, 等. 免耕播種機仿形爪式防堵清茬機構參數分析[J]. 農業機械學報, 2011, 42(10): 56-60.
Fan Xuhui, Jia Honglei, Zhang Weihan, et al. Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 56-60.
[15] 張喜瑞, 何進, 李洪文, 等. 免耕播種機驅動圓盤防堵單元體的設計與試驗[J]. 農業工程學報, 2009, 25(9): 117-121.
Zhang Xirui, He Jin, Li Hongwen, et al. Design and experiment on the driving disc of anti-blocking unit for no-tillage planter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(9): 117-121.
[16] 李陽, 王吉奎, 龔賀賀, 等. 夾指鏈式殘膜回收機[P]. 中國專利: 2015106796692, 2015-12-30.
[17] 陳遠玲, 吳龍, 葉才福, 等. 插秧機液壓升降及水平擺動系統的建模與仿真[J]. 液壓與氣動, 2015(12): 87-90.
Chen Yuanling, Wu Long, Ye Caifu, et al. The modeling and simulation on hydraulic lifting and swing system of transplanter [J]. Chinese Hydraulics & Pneumatics, 2015(12): 87-90.
[18] 常德山. 插秧機的分類及插植原理[J]. 湖南農機, 2013(4): 23.
[19] 顧立峰, 張慶榮, 陸躍德, 等. 手扶式和高速乘座式插秧機的仿形液壓系統簡介[J]. 農業機械, 2007(2): 159.
[20] 游兆延, 胡志超, 吳努, 等. 基于NEC單片機田間用超聲波測距的實現[J]. 電子設計工程, 2014, 22(6): 137-139.
You Zhaoyan, Hu Zhichao, Wu Nu, et al. Ultrasonic distance measure ap-plication in field based on NEC microcomputer [J]. Electronic Design Engineering, 2014, 22(6): 137-139.
[21] Lee W S, Slaughter D C, Giles D K. Robotic weed control system for tomatoes [J]. Precision Agriculture, 1999, 1(1): 95-113.
[22] 邱白晶, 閆潤, 馬婧, 等. 變量噴霧技術研究進展分析[J]. 農業機械學報, 2015, 46(3): 59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72.
[23] 何雄奎, 嚴苛榮, 儲金宇, 等. 果園自動對靶靜電噴霧機設計與試驗研究[J]. 農業工程學報, 2003, 19(6): 78-80.
He Xiongkui, Yan Kerong, Chu Jinyu, et al. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2003, 19(6): 78-80.
[24] 王萬章, 洪添勝, 李捷, 等. 果樹農藥精準噴霧技術[J]. 農業工程學報, 2004, 20(6): 78-80.
Wang Wanzhang, Hong Tiansheng, Li Jie, et al. Review of the pesticide precision orchard spraying technologies [J]. Transactions of the Chinese Society of Agricultural Engineering, 2004, 20(6): 78-80.
[25]? 鄒建軍, 曾愛軍, 何雄奎, 等. 果園自動對靶噴霧機紅外探測控制系統的研制[J]. 農業工程學報, 2007, 23(1): 129-132.
Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard [J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(1): 129-132.
[26] 楊麗, 顏丙新, 張東興, 等. 玉米精密播種技術研究進展[J]. 農業機械學報, 2016, 47(11): 38-48.
Yang Li, Yan Bingxin, Zhang Dongxing, et al. Research progress on precision planting technology of maize [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 38-48.
[27] 苑嚴偉, 白慧娟, 方憲法, 等. 玉米播種與測控技術研究進展[J]. 農業機械學報, 2018, 49(9): 1-18.
Yuan Yanwei, Bai Huijuan, Fang Xianfa, et al. Research progress on maize seeding and its measurement and control technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(9): 1-18.
[28] 吳海燕, 崔彥宏, 孫昌鳳. 不同類型玉米雜交種播深與出苗相關性的研究[J]. 玉米科學, 2011, 19(2): 109-113.
Wu Haiyan, Cui Yanhong, Sun Changfeng. Study on relations of sowing depth and seedling emergence of different types of maize seeds [J]. Journal of Maize Sciences, 2011, 19(2): 109-113.
[29] 岳麗杰, 文濤, 楊勤, 等. 不同播深對玉米出苗的影響[J]. 玉米科學, 2012, 20(5): 88-93.
Yue Lijie, Wen Tao, Yang Qin, et al. Effects of different sowing depths on seeding emergence of maize [J]. Journal of Maize Sciences, 2012, 20(5): 88-93.
[30] 曹慧英, 史建國, 朱昆侖, 等. 播深對夏玉米冠層結構及光合特性的影響[J]. 玉米科學, 2016, 24(1): 102-109.
Cao Huiying, Shi Jianguo, Zhu Kunlun, et al. Effects of sowing depth on canopy structure and photosynthetic characteristics of summer maize [J]. Journal of Maize Sciences, 2016, 24(1): 102-109.
[31] Karayel D, Ozmerzi A. Effect of tillage methods on sowing uniformity of maize [J]. Canadian Biosystems Engineering, 2002, 44: 2-23.
[32] Poncet A M, Fulton J P, Mcdonald T P, et al. Effect of heterogeneous field conditions on corn seeding depth accuracy and uniformity [J]. Applied Engineering in Agriculture, 2018, 34(5): 819-830.
[33] Hakansson I, Arvidsson J, Keller T, et al. Effects of seedbed properties on crop emergence: 1. Temporal effects of temperature and sowing depth in seedbeds with favourable properties [J]. Acta Agriculturae Scandinavica, Section B-Plant Soil Science, 2011, 61(5): 458-468.
[34] Knappenbercer T, Koller K. Spatial assessment of the correlation of seeding depth with emergence and yield of corm [J]. Precision Agriculture, 2012, 13: 163-180.
[35] Badua S A, Sharda A, Flippo D, et al. Real-time gauge wheel load variability of a row-crop planter during field operation [J]. Applied Engineering in Agriculture, 2018, 61(5): 1517-1527.
[36] Poncet A M, Fulton J P, Mcdonald T P, et al. Corn emergence and yield response to row-unit depth and downforce for varying field conditions [J]. Applied Engineering in Agriculture, 2019, 35(3): 399-408.
[37] 蔡國華, 李慧, 李洪文, 等. 基于ATmega128單片機的播深自控系統試驗臺的設計[J]. 農業工程學報, 2011, 27(10): 11-16.
Cai Guohua, Li Hui, Li Hongwen, et al. Design of test-bed for automatic depth of furrow opening control system based on ATmega128 single chip microcomputer [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(10): 11-16.
[38] Wen L, Fan X, Liu Z, et al. The design and development of the precision planter sowing depth control system [J]. Sensors & Transducers, 2014, 162(1): 53-58.
[39] 趙金輝, 劉立晶, 楊學軍, 等. 播種機播深控制系統的設計與室內試驗[J]. 農業工程學報, 2015, 31(6): 35-41.
Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(6): 35-41.
[40] 白慧娟, 方憲法, 王德成, 等. 玉米播種機播深和壓實度綜合控制系統設計與試驗[J]. 農業機械學報, 2020, 51(9): 61-72.
Bai Huijuan, Fang Xianfa, Wang Decheng, et al. Design and test of control system for seeding depth and compaction of corn precision planter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 61-72.
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科技視界(2016年20期)2016-09-29 14:13:02
