基于圖像處理的室內巡檢機器人坐標提取方法研究
2023-06-21 08:03:41葛動元周加超叢佩超
機電信息 2023年12期
葛動元 周加超 叢佩超
摘要:為獲取室內安全走道中的障礙物信息,以引導巡檢機器人進行自主作業,提出一種基于分布式遠程通信與二維坐標提取的地圖更新方法。控制ROS(Robot Operating System)機器人基于Gmapping算法創建全局先驗地圖,用于巡檢機器人的軌跡規劃;若檢測到新增障礙物,通過圖像處理方法獲取障礙物位置坐標,并將其作為標記點,引導機器人進行局部建圖,從而實現對原始地圖的更新。試驗結果表明,該方法具有一定的可行性。
關鍵詞:巡檢機器人;分布式遠程通信;二維坐標提取;動態地圖更新
中圖分類號:TP242? ? 文獻標志碼:A? ? 文章編號:1671-0797(2023)12-0086-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.024
0? ? 引言
利用機器人定期對消防過道進行巡視,是人員遇到緊急事故時實現安全疏散的重要保證,而最新的環境地圖信息是巡檢機器人完成自主導航的前提條件。
目前,同步定位和建圖(Simultaneous Localization and Mapping,SLAM)技術是通過結合檢測、跟蹤動態障礙物技術來實現地圖的構建和更新[1]。
相關研究表明,由于系統缺乏實時更新的機制,SLAM技術構建的柵格地圖在長時間運行后易產生難以修正的累計誤差[2-3]。
Xu等人[4]通過改進ORB RGB-D SLAM與占用柵格地圖提出了一種新的室內實時定位系統,克服了現有解決方案面臨的問題,然而深度相機容易受到隨機噪聲的影響和感知范圍的限制,導致產生深度圖像的部分缺失,最終影響視覺SLAM的定位精度。
針對上述移動機器人的室內定位精度不高的問題,為進一步提高機器人室內定位準確度,本文以巡檢機器人在校園內消防安全走道的自主巡檢為研究背景,提出一種基于分布式遠程通信與二維坐標提取的地圖更新方法。
1? ? 樣機介紹和通信設置
1.1? ? 測試樣機
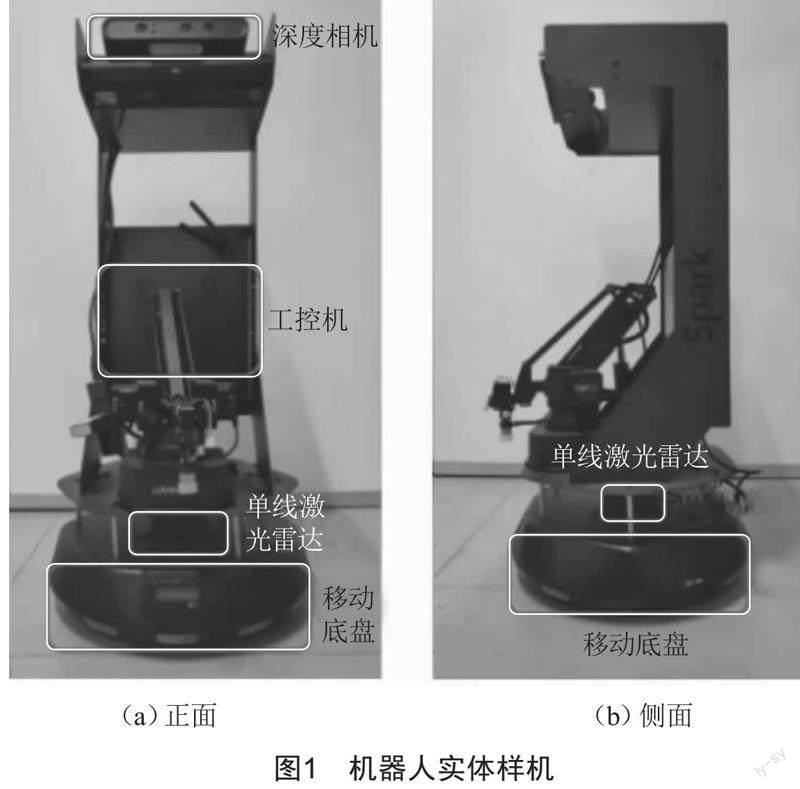
圖1所示為深圳市創想未來科技公司研制的型號為Spark-T的自主導航機器人,本文將其作為巡檢機器人的測試樣機,搭載基于Ubuntu 16.04的開源機器人操作系統。
1.2? ? 分布式通信設置
為實現通信,在Ping命令測試網絡的實時工況后,基于ROS的分布式框架上所有節點可以在不同的主機上運行,因此可以通過分布式通信機制控制多機器人同時工作。本文將巡檢機器人和先導機器人分別作為主機和從機,實現通信的步驟如下:
1)在兩臺機器人主機中設置計算機IP地址和名稱,保證多個計算機底層數據通信的暢通。
2)通過在主從機上設置環境變量的方式,實現對ROS Master的位置定義。
2? ? Gmapping算法建圖
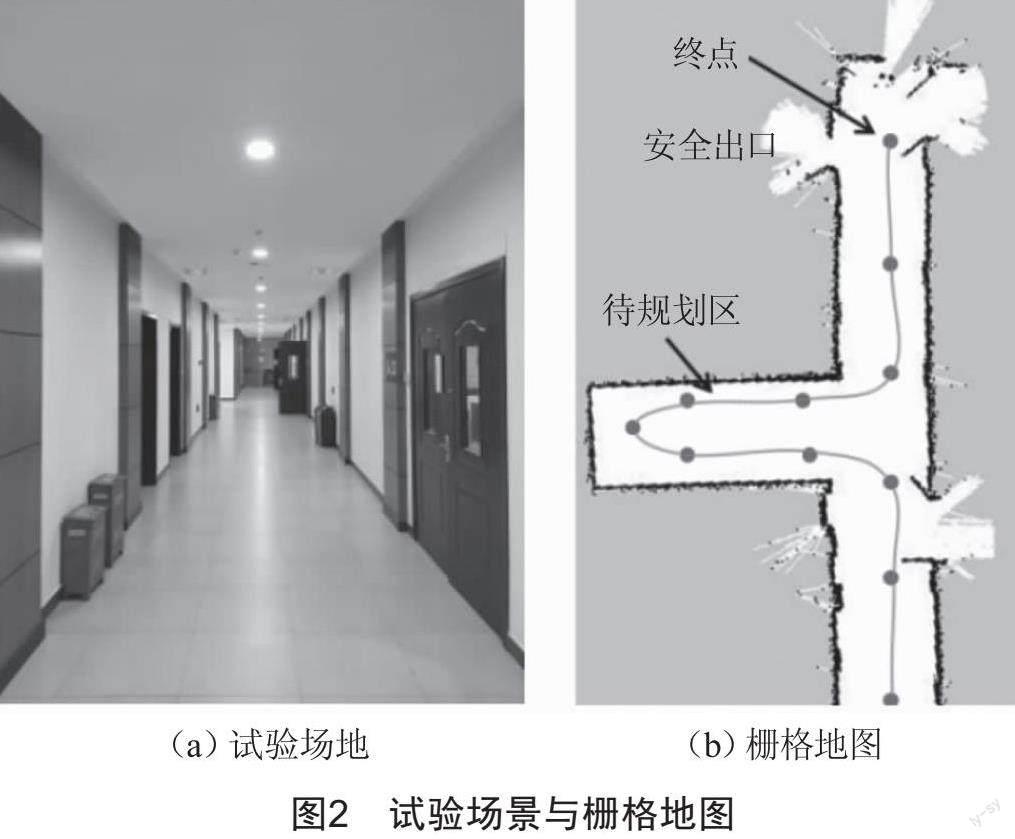
為創建全局先驗地圖,用于巡檢機器人的軌跡規劃,本節選取了校園內的一個室內安全疏散過道作為實體機器人測試場地,如圖2(a)所示。
Gmapping算法主要以激光雷達和里程計為硬件載體,通過采集環境中的點云數據和里程計數據構建未知環境的地圖[5]。此外,研究表明,Gmapping算法在構建例如長廊、走道等具有低特征的小場景地圖時,計算開銷低且建圖精度高[6]。
巡檢機器人在走道的工作環境屬于長廊場景,因此選用基于Gmapping算法的激光SLAM作為機器人的建圖算法,對走道構建全局的二維柵格地圖,如圖2(b)所示,并將該圖作為巡檢機器人導航的全局先驗地圖。
3? ? 機器人坐標提取
3.1? ? 自動巡檢和坐標分析
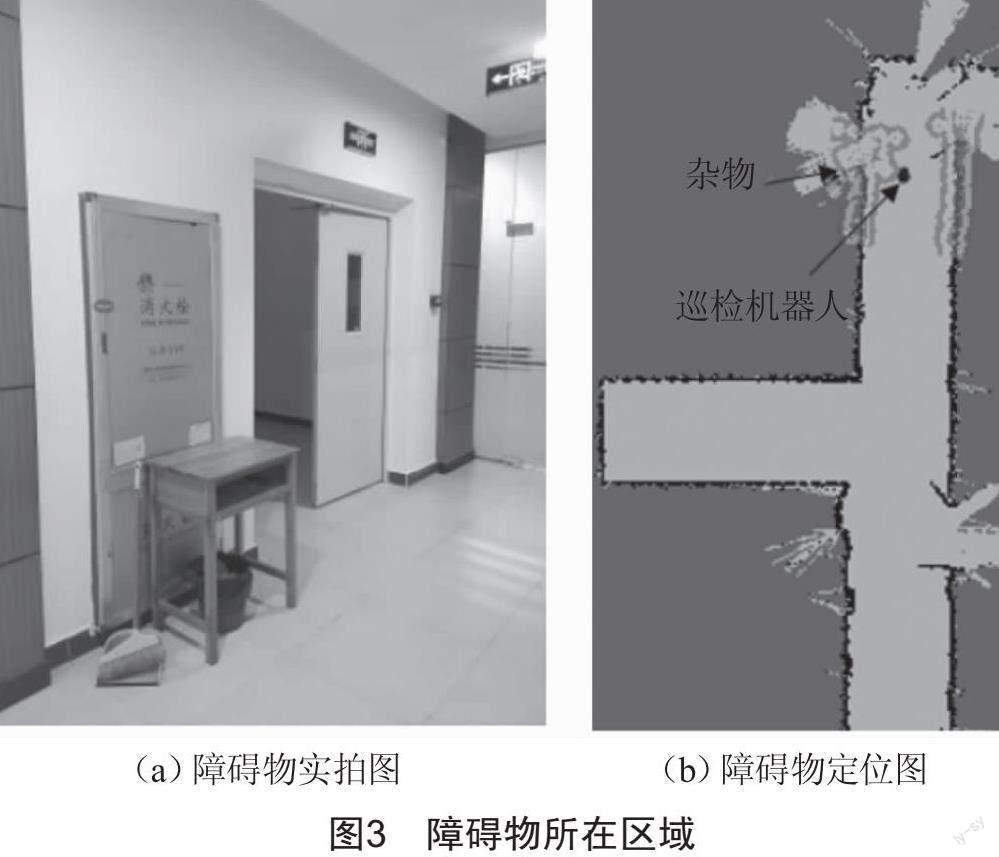
為進行地圖更新和巡檢試驗,在走道的安全出口旁擺放桌子等雜物作為障礙物,如圖3(a)所示。生成的局部定位地圖如圖3(b)所示,其中紅色部分代表雷達原始數據點分布情況,藍色區域表示為保持安全距離而產生的障礙物膨脹區域。
由圖3(b)可知,機器人實時避障過程中激光雷達掃描到物體的輪廓不一定完整,且膨脹區域跟周圍物體相連接,難以準確提取障礙物中心坐標,即存在坐標的不確定性。相比之下,機器人的形狀和大小一般固定,通過圖像處理方式易于確定坐標值,且處于障礙物附近,因此將問題轉化為提取機器人在避障時的實時坐標,該坐標即先導機器人的導航指引點,自主導航至此點時可與障礙物保持一定距離且不影響局部建圖。
為采用直角坐標系法對機器人的位置信息進行描述,假設每個柵格的中心位置為柵格的直角坐標,(m,n)為柵格地圖中任意一點,則每個柵格編號P都與(m,n)相對應,計算公式如式(1)所示。柵格中心坐標(mGrid,nGrid)與P之間同樣具有映射關系。
式中:int為取整函數;mlength為坐標取值范圍;S為柵格粒的大小。
3.2? ? 機器人像素坐標確定
本節主要結合Halcon視覺庫確定機器人在二維圖像中的像素坐標,進行了如圖4所示的圖像處理操作,最終提取了機器人的像素坐標。
4? ? 局部建圖及更新
巡檢機器人根據標記點的位置進行針對性的局部建圖,地圖更新前后的對比如圖5所示。由圖可知,地圖(b)中出現了更多的陰影部分,說明獲得了更多的障礙物信息,地圖信息更加完善,更有利于后續的機器人避障作業。
5? ? 結束語
本文提出了一種基于全局先驗地圖與二維坐標提取的地圖更新方法。以校園的室內消防安全走道為例,對所提方法進行實體樣機驗證。結果表明,所提基于圖像處理的機器人定位方法能對機器人進行像素坐標定位,具有一定的可行性。
[參考文獻]
[1] 馬輝.基于巡檢車視覺的半動態目標在語義地圖中的更新方法研究[D].杭州:浙江科技學院,2020.
[2] ENDRES F,HESS J,STURM J,et al.3-D mapping with an RGB-D camera[J].IEEE Transactions on Robotics,2014,30(1):177-187.
[3] WHELAN T,KAESS M,LEONARD J J,et al.Deformation-based loop closure for large scale dense RGB-D SLAM[C]//2013 IEEE/RSJ International Conference on Intelligent Robots and Systems,2013:548-555.
[4] XU L C,FENG C,KAMAT V R,et al.An occupancy grid mapping enhanced visual SLAM for real-time locating applications in indoor GPS-denied environments[J].Automation in Construction, 2019,104:230-245.
[5] ABDELRASOUL Y,SAMAN A B S H,SEBASTIAN P.A quantitative study of tuning ROS gmapping parameters and their effect on performing indoor 2D SLAM[C]// 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automa-tion(ROMA),2016:1-6.
[6] 鄭兵,陳世利,劉蓉.基于螢火蟲算法優化的Gmapping研究[J].計算機工程,2018,44(9):22-27.
收稿日期:2023-03-07
作者簡介:葛動元(1970—),男,湖南邵陽人,博士,副教授,研究方向:機器視覺、機器學習。
