
疫情環境下用于物資配送的送貨無人機設計
2023-06-21 22:09:52張一鳴
現代信息科技 2023年1期

疫情環境下用于物資配送的送貨無人機設計
張一鳴
(江南大學,江蘇 無錫? 214122)
摘? 要:2020年新冠疫情暴發,對無接觸配送提出了更高的要求。基于無人機小巧敏捷的特點,設計了一款可以應用在居民區的送貨無人機,系統圍繞TM4C124GH6PM及其擴展版展開,搭載了激光雷達、TOFSense激光測距傳感器、機載計算機樹莓派、OPENMV等模塊,采用PID調節和圖像處理等算法,解析無人機姿態和位置信息,自動識別物資的樣本特征,實現自動送貨投遞功能,減少疫情傳播風險,通用性強,擁有廣闊的發展前景。
關鍵詞:送貨無人機;OpenMV;圖像識別
中圖分類號:TP242 文獻標識碼:A 文章編號:2096-4706(2023)01-0142-03
Design of Delivery UAV for Material Distribution under the Environment of Epidemic Situation
ZHANG Yiming
(Jiangnan University, Wuxi? 214122, China)
Abstract: The outbreak of COVID-19 epidemic situation in 2020 puts forward higher requirements for contactless distribution. Based on the characteristics of small and agile of the UAV, this paper designs a type of delivery UAV can be applied in residential areas. The system extends around TM4C124GH6PM and its extension, carries the laser radar, TOFSense laser ranging sensor, airborne computer raspberry pie, OPENMV and other modules, and uses PID adjustment and image processing algorithm, analyzes the attitude and location information of UAV, automatically recognizes the material sample characteristics. It realizes automatic delivery function, reduces the risk of epidemic situation spread, and it has strong versatility and broad prospects for development.
Keywords: delivery UAV; OpenMV; image recognition
0? 引? 言
2020年新冠疫情爆發,社區居民的物資配送問題面臨巨大挑戰。居民下樓自取或相關工作人員上門配送等傳統配送方式,均會增加交叉感染的風險,且將使社區工作人員的工作量劇增,降低配送效率,造成人員不足等問題。送貨無人機可以解決這一問題,首先,相較于智能小車,無人機在“二維”基礎上提升到“三維”,可以直接將物資送至窗戶外,使居民足不出戶就可以取到物資,真正實現了“無接觸配送”,降低傳染風險。而且無人機可以提升工作效率,減少了一些重復且機械性的工作,如工作人員上下樓,降低勞動成本。除此以外,當不同種類的物資需配送到不同指定居民時,可以在送貨無人機上搭載視覺模塊,識別物資的特征信息,如二維碼、顏色和形狀,從而實現精準自動配送,減少了因人工疏忽而造成的重復勞動,進一步提高工作效率。
1? 系統總體設計
本系統由信息采集系統、飛行姿態控制、飛行高度控制和視覺模塊組成。系統以TI LaunchPad核心板與擴展板為核心,解析飛控數據,實現無人機的姿態自穩,同時主板上的按鍵可以作為外接輸入,輸入不同投放點的坐標信息,使用TOFSense激光測距對地傳感器測量飛行高度,使用OPENMV視覺模塊識別物資特征,將數據發至飛控,從而實現不同物資的點對點配送,使用激光雷達進行SLAM建圖,測量無人機與建筑物的水平距離,得到無人機位置信息,使用步進電機控制吊艙上下移動,從而實現物資配送。整個系統可以實現定高飛行和定點飛行,精準投放物資,此外,可以使用按鍵輸入不同建筑物的位置信息,從而可直接適應不同居民區,靈活性好。
當送貨無人機執行送貨任務時,需首先通過按鍵,輸入居民區每棟樓的位置坐標信息,接著用安裝在底部的視覺模塊識別物資特征,起飛無人機,無人機先飛至目標高度,后飛至指定位置,當無人機在指定點上方穩定懸停,啟動電機控制吊艙向下移動,將貨物放置在平臺上后,控制吊艙向上移動,收回吊艙,完成送貨任務,再原路返回至起飛點并自動降落。
2? 系統硬件組成
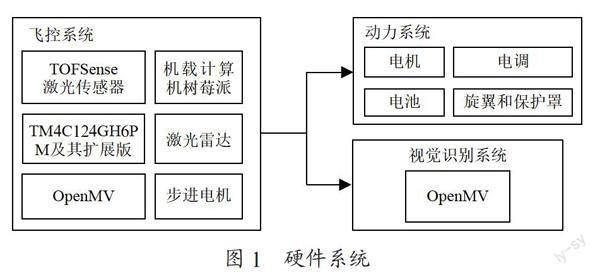
硬件系統組成如圖1所示。主要包括飛控系統、動力系統和視覺識別系統。飛控系統是送貨無人機的核心部分,圍繞TM4C124GH6PM及其擴展版展開,搭載了TOFSense激光測距對地傳感器、激光雷達、OPENMV、機載計算機樹莓派和步進電機。飛控采集傳感器模塊傳來的數據,處理并返回飛控的姿態和位置等信息,根據PID等控制算法計算出期望值傳給動力系統,從而控制定高飛行和定點飛行。注意到居民樓的二維平面通常是矩形或其他形狀,且在不同高度的環境差異不會太大,所以不會影響激光雷達SLAM建圖定位的精準度。激光雷達建模數據由樹莓派處理后傳給飛控,從而獲得飛控位置信息。動力系統由電機、電調、電池、旋翼和保護罩組成。主板上的PWM串口發送的信號通過電調提供三相交流電,從而驅動交流電機,以帶動飛機旋翼的旋轉。視覺識別系統即OPENMV模塊,它以STM32F427CPU為核心,集成OV7725攝像頭芯片,可使用Python進行編程。
3? 軟件系統設計
3.1? 飛控部分
飛機的穩態飛行包括姿態控制和高度控制。通過PID控制算法調整無人機的橫滾角和俯仰角,從而改變無人機水平方向加速度,通過調整偏航角來改變機頭方向,來實現無人機位置和速度的改變,以保證飛機可以實現懸停或定點飛行等飛行動作。高度控制利用無人機速度控制來控制無人機上下移動,改變無人機的飛行高度。編寫程序時,將整個送貨過程分為不同子任務,當上一個子任務完成后才進入下一個子任務,使用計數器自加來實現子任務的跳轉。
3.2? 視覺部分
視覺部分的代碼分為有無條形碼兩種情況。
當物資上有條形碼時,使用遙控器調整無人機SDK模式為條形碼模式,此時OPENMV運行的程序為識別條形碼任務后,獲取條形碼上的數值信息,如坐標位置或樓棟號,將獲取數據打包給飛控,從而實現不同送貨點的投遞,此種方法的準確性更高。
當物資上沒有條形碼時,使用遙控器調整無人機SDK模式為顏色形狀模式,此時OPENMV運行的程序為識別顏色和形狀,在遍歷所有像素點后,根據閾值區分出不同的色塊,設定第一優先級為色塊顏色識別,使用LAB顏色空間調節閾值,成功識別色塊顏色后,設定第二優先級為色塊形狀識別,使用占空比來判斷形狀,最后將識別成功的顏色形狀數據打包傳給飛控,從而實現不同送貨點的投遞。
4? 系統調試
4.1? 場地設計
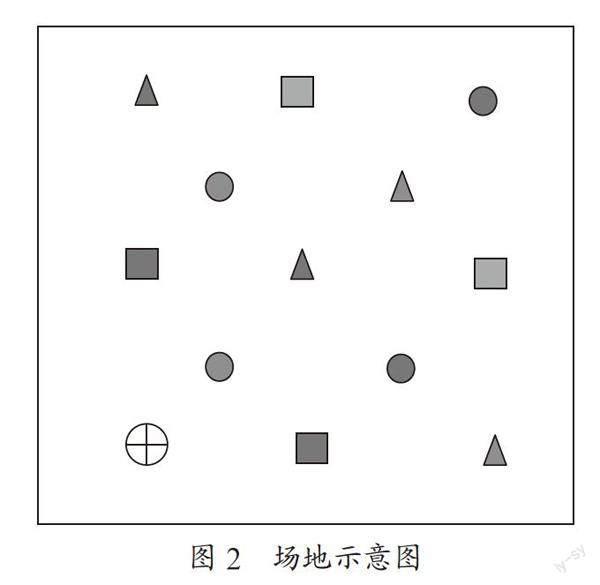
由于場地有限,將送貨場景調整在室內,在地面上設置十二個不同的投遞點位置,設計6種不同樣板來代表物資的特征,分別是紅色三角形、紅色矩形、紅色圓形、藍色三角形、藍色矩形和藍色圓形,用50克砝碼模擬物資,將其用細繩系在步進電機上,砝碼的上下運動表示送貨過程。場地示意圖如圖2所示,無人機實物圖如圖3所示。
4.2? 無人機的調試
調試時,為防止代碼邏輯錯誤造成的炸機問題,先不裝旋翼,手持無人機模擬無人機飛行過程,在每一個子任務完成后添加激光打點的動作,通過觀察是否有激光打點來判斷子任務是否完成。當判斷邏輯無錯誤后,再裝上旋翼進行無人機的飛行測試。此種方法可以有效避免一些不必要的因代碼邏輯問題而造成的炸機。
調試過程中主要發現了三個問題。
首先是在投遞點懸停送貨時,無人機會出現輕微不穩搖晃,此種搖晃雖然不會對無人機的穩定飛行產生很大的影響,但因物資是由砝碼固定在無人機上,且細繩的長度較長,當細繩放下,進行物資投遞時,懸停無人機的輕微搖晃會使細繩的搖晃角度較大,導致物資放置位置與期望點的差大于15 cm,經過多次測試,發現搖晃問題與判斷閾值和懸停時間相關。判斷閾值是判斷無人機是否到達投遞點的條件,即當無人機的實時位置與投遞點的距離小于閾值時,認為無人機已經到達投遞點。測試初期我們設置此閾值為5 cm,發現無人機會懸停較長時間,輕微搖晃調整來到達距投遞點5 cm范圍內的位置,從而造成晃動,改變閾值并多次測試后,發現設置閾值為8 cm時,無人機不會出現晃動,且懸停時間短,所以最終采用8 cm為判斷閾值。同時,懸停時間也會影響穩定度,當無人機首次到達指定位置時,會出現輕微晃動,當懸停時間過長,同樣也會出現晃動。經過多次測試,發現到達指定位置后懸停兩秒,此時無人機是最穩定的,所以設置此時放下吊艙,從而完成送貨任務。
其次是在返回至原點后降落的過程會出現漂移,導致最終落地點與起飛點的距離相差較大。猜想造成此現象的原因可能為飛行高度平面的環境與地面環境相差過大,導致激光雷達定位不準,所以我們直接采用速度控制下降的方法,即在指定高度平面到達出發點上方后,就直接控制速度垂直降落,不使用激光雷達,且下降速度設置為-35 cm/s。
無人機在降落后會出現彈跳現象,考慮是否因降落速度過快而導致彈跳。在設置下降速度為-25 cm/s后,發現此下降速度會使飛機出現嚴重漂移。之后設置下降速度為-30 cm/s,發現不會出現漂移問題,但偶爾會出現小幅度彈跳。接著嘗試設置將下降過程分為兩段,當無人機高度大于20 cm時,下降速度設為-30 cm/s,高度小于20 cm時,下降速度設為-25 cm/s,發現無人機第一段下降穩定,第二段下降還是會出現嚴重漂移。所以最后決定將下降速度設為-30 cm/s,此時偶爾出現的小幅度彈跳現象不會對送貨無人機的安全性和準確性產生影響,可忽略不計。
4.3? 視覺部分的調試
4.3.1? OPENCV
由于無人機上搭載了樹莓派,且OPENCV功能強大,故首先考慮使用樹莓派進行視覺識別。使用攝像頭拍攝視頻,處理其捕獲的幀,通過識別顏色閾值、過濾閾值外的部分、腐蝕圖像、膨脹處理、邊緣識別等步驟來識別色塊顏色,再通過灰度化圖片,進行二值化來凸顯輪廓,計算輪廓角點來識別形狀,三個角點為三角形,四個角點為矩形,十個或十個以上角點為圓形。經測試,此種方法精確度很高,但是刷新幀率極低,很難滿足實時識別的要求,如圖4所示,故不使用OPENCV。
4.3.2? OPENMV
利用OPENMV IDE進行調試,顏色的識別較容易且準確,但形狀的判斷由于現實中光線和背景環境的影響,占空比需調整。經過多次測試后,得出0.855,0.65,0.40這三個數值,當占空比大于0.855時判斷為矩形,占空比小于0.855但大于0.65時判斷為三角形,占空比小于0.65但大于0.40時判斷為圓形,其中,由于圓形與矩形在判斷時容易混淆,故在占空比判斷圓形的基礎上,再次利用draw_circls()函數來識別圓形。為防止偶然的誤判結果傳給飛控導致整個飛行結果的錯誤,分別給六個形狀設定計數器,每識別到相應特征則計數器加一,讓六個計數器進行計數競爭,當計數器首先達到500時,則認為結果是此計數器代表的物資特征,并將此結果傳給飛控,經過多次測試,發現圓形相較于其他形狀來更說不易識別,且由于外界環境和光線的影響,紅色比藍色更不易識別,于是將紅色圓形的識別成功閾值從500改為100,將藍色圓形識別成功閾值從500改為200,可以在保證識別準確度的情況下提高識別速度,如圖5所示。
5? 結? 論
本文設計了一款可以在居民區運輸物資的送貨無人機,適用于疫情的大背景下對于無接觸送貨的要求,降低了疫情傳播風險,同時,也可以應用于日常生活中快遞外賣的運輸,完成新零售背景下“最后一公里”的挑戰,有著較好的發展前景,且在室內模擬外部的環境下均可以實現設想內容。
由于室內環境與室外環境有一定差別,故需做出一些改動來適應室外環境。如激光雷達測距的閾值有限,不能滿足室外對于整個居民區的SLAM建圖,所以可以考慮使用GPS和激光雷達相結合的方式,使用GPS進行初步定位后,飛至投遞點,后使用激光雷達測距,調整無人機與建筑物的距離,從而實現精準投放。為提高準確性,還可以在使用底部OPENMV進行色塊追蹤,進一步調整無人機的位置,從而控制精度。同時,TOFSense激光測距對地傳感器的閾值只有12 m,只滿足室內測試的要求,在戶外測試的時候需要更改為其他閾值更大的測距傳感器。
參考文獻:
[1] 張會云,張琳琳.后疫情時代的“無接觸配送”服務 [J].綜合運輸,2021,43(8):102-106.
[2] 馬曉琳,周弘斌,黃福龍.基于OpenMV的四旋翼無人機目標跟蹤系統設計與實現 [J].電子測試,2022,36(2):20-21+54.
[3] 王丹丹,杜雪,李宏杰.基于植保無人機近地面施藥技術的研究 [J].南方農機,2022,53(13):7-11+25.
[4] 張杰,李妍峰.疫情環境下生鮮配送的選址-路徑問題 [J/OL].中國管理科學:1-12[2022-09-09].DOI:10.16381/j.cnki.issn1003-207x.2022.0575.
[5] 郭棟,佀秀杰,吳俊吉.無接觸配送機器人設計與仿真 [J].電子世界,2021(23):27-28.
作者簡介:張一鳴(2000.04—),女,漢族,河北唐山人,本科在讀,研究方向:無人機技術。
收稿日期:2022-09-19
