融合無人機LiDAR與攝影測量的河道地形測繪方法
2023-06-27 05:32:42沙紅良陸德中付康李樹明
人民長江 2023年4期
沙紅良 陸德中 付康 李樹明
摘要:針對無人機攝影測量過程中植被穿透率低、無人機LiDAR(激光雷達)點云地物提取困難等問題,研究了一種融合無人機攝影測量與LiDAR的高精度河道地形測繪方法。該方法利用TerraSolid軟件對LiDAR點云數據進行去噪與地形濾波處理,提取測區高精度DEM(數字高程模型),并通過LiDAR點云與DOM(數字正射影像)融合建立真彩色三維點云、與數碼影像融合重建測區實景三維模型,實現地物的精準測繪。典型應用結果表明:該方法能有效發揮兩種技術的互補優勢,解決長江下游河道岸灘區域植被高密度覆蓋的地貌測繪與建筑物復雜多樣的地物測繪難題,數據采集與處理高效,產品直觀、精細、多樣化,精度可滿足1∶1 000比例尺地形圖測繪的要求。
關 鍵 詞:無人機; 攝影測量; LiDAR; 河道地形測繪; 長江中下游
中圖法分類號: P237
文獻標志碼: A
DOI:10.16232/j.cnki.1001-4179.2023.04.022
0 引 言
河道地形測繪資料是水利工程開發、水資源利用與保護、防洪減災等業務的基礎信息[1-3]。河道洲灘地區植被覆蓋度高、河道陸域部分往往溝壑縱橫,多呈彎曲、條帶狀地形,若采用全站儀、GNSS-RTK等傳統的地面接觸式測量方法,存在交通不便、難以到達、電子信號被屏蔽等問題,施測極其困難,而且這種點的數據采集方式難以滿足“數字河道”的精細化要求[4-6]。近年來,低空無人機航測技術以其高效的面域數據采集方式,為解決該類復雜區域大比例尺地形測繪難題帶來了良好契機[7]。其中,無人機(UAV)攝影測量技術具有成本低、靈活便捷、可靠性強、信息豐富、直觀逼真等優點,但是,其點云植被穿透率低,采用常規攝影測量的方式難以得到植被覆蓋區域的地面高程。此外,在拍攝重疊度不足或動態場景中,其生成的三維模型常存在扭曲或缺失情況[8]。無人機LiDAR(激光雷達)技術具有植被穿透能力強、能直接獲取三維點云數據、定位精度高、抗干擾能力強等互補優勢,已成為了高自動化提取DTM(數字地面模型)的主要手段之一[9-10],但亦存在成本高、復雜區域地物提取困難等不足[11-12]。有效融合兩種低空無人機技術的互補優勢,取長補短,有利于內業地物、地貌的判斷和編繪,顯著提高測繪成果的精度和可靠性[13-15]。然而,在現有的低空無人機航測系統中,考慮到荷載、成本、航線重疊度要求不同等問題,很少有設備同機攜帶數碼相機與LiDAR裝置。近年來,國內外諸多學者對機載LiDAR與攝影測量數據融合處理進行了研究,并取得了較為豐碩的成果。尚大帥等[16]對機載LiDAR點云與正射影像進行融合測試,將正射影像光譜賦予點云,彌補了LiDAR點云缺失光譜信息的缺點;Rottensteiner[17]研究了結合航空影像與LiDAR數據的建筑物模型提取方法;Secord等[18]探討了利用LiDAR數據生成的DEM(數字高程模型)與對應影像資料進行特征提取的方法;Thuy等[19]研究了從LiDAR和影像數據中提取建筑物的多尺度理論;Cao等[20]提出了一種LiDAR數據與航空光學影像融合的地物分類方法。然而,現有理論方法面對高植被覆蓋、建筑物混淆等復雜場景,往往造成自動化成圖失敗,需要依賴大量、繁瑣的人工干預來彌補,難以全面滿足實際應用需求。
本文研究無人機攝影測量與無人機LiDAR的融合方法,通過對兩套獨立系統的數據融合,輔以少量而便捷的人機交互,來解決河道洲灘地形的精準、可靠、高效測繪難題。
1 研究方法
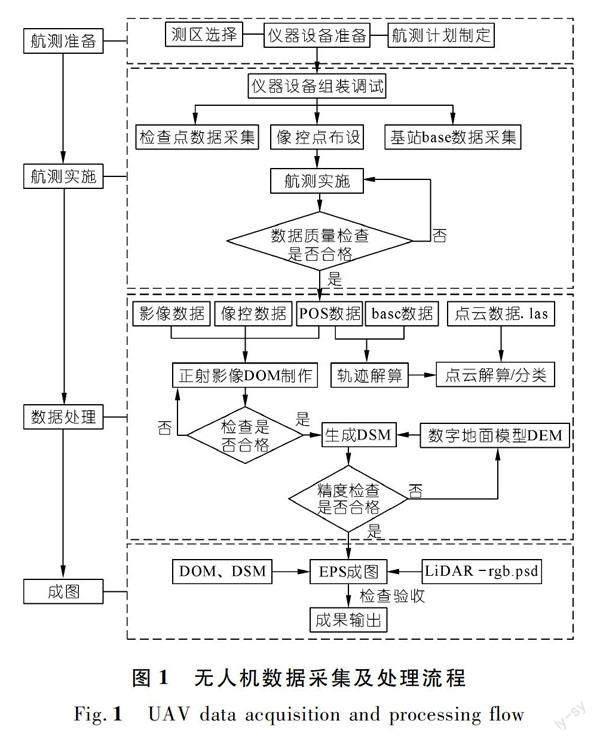
河道岸灘地形測量主要任務是獲取河道岸灘高精度DEM,并對堤防、防洪墻、依比例坡線、溝坎、房屋及樓層數、電桿等地物進行精細化測繪,測圖比例尺為1∶500~1∶2 000。在長江中下游地區,植被茂密、地物繁多,這些要素的測繪難度和工作量都非常巨大,采用單一的傳感器數據難以保證測繪成果的可靠性。因此,本文引入無人機航攝與無人機LiDAR兩類傳感器獲得測區數據,并對數據進行融合建模,以期實現高精度DEM提取與地物信息的精準判別與成圖,數據采集與融合建模流程如圖1所示。
1.1 數據采集
數據采集主要包括實地踏勘、地面基站建立、像控點與檢查點布設與測量、航線規劃與參數設置、設備組裝與調試、航測實施與質量檢查等。數據采集首先要熟悉飛行區域,了解其環境的復雜程度,以便確定后期的飛行參數信息,如航高、航向重疊度和旁向重疊度等。
無人機攝影測量數據采集時,航高應根據測圖精度要求、設備參數和測區地形起伏情況來確定,航向與旁向重疊度通常設置為70%左右。同時,影像質量應滿足:影像清晰,反差適中,顏色飽和,色彩鮮明,色調一致、紋理清楚,層次豐富,無明顯失真,能辨別與地面分辨率相適應的細小地物。對于遮蔽較嚴重的測區,可采用單鏡頭無人機實施交叉航線傾斜攝影,相機鏡頭俯仰角設置為40°左右,航向、旁向重疊度均設置為75%左右,或直接采用多鏡頭傾斜攝影。近水邊數據采集時,航線盡量布設在地面上空,與水邊保持一定距離,以防像主點落水,影響影像質量。像控點盡量成對布設,均勻覆蓋整個測區,可以提高成圖精度。
無人機LiDAR主要用于植被高覆蓋區的數據采集。為保證點云定位精度,根據慣導定姿精度來設置航高。同時,為了保證點云密度,設置機載激光掃描系統旁向重疊度為55%左右。另外,在植被高密集區域加密航線,使原始點云密度不少于80~100點/m2,并保證地形圖上每100 cm2范圍內不少于10個有效高程點。對于沙洲、荒地等裸地區域,可降低點云重疊度,以提高作業效率。
1.2 影像數據處理
DOM(數字正射影像)是利用DEM對原始影像進行逐像元投影差改正、影像鑲嵌,并根據圖幅范圍剪裁生成影像數據模型。DOM具有精度高、信息豐富、直觀逼真、獲取快捷等優點,可作為地圖分析背景平面控制信息,用于河道數字地形圖的繪制。
考慮到各無人機攝影測量商業軟件中,Pix4Dmapper在DOM生成中效率與質量兼顧,本文DOM制作采用Pix4Dmapper軟件。將單鏡頭航攝影像、POS數據、像控點坐標導入Pix4Dmapper,經初始化(快速檢測)、像控點刺取、空三解算(全面高精度)等步驟,生成測區正射影像。
1.3 LiDAR數據處理
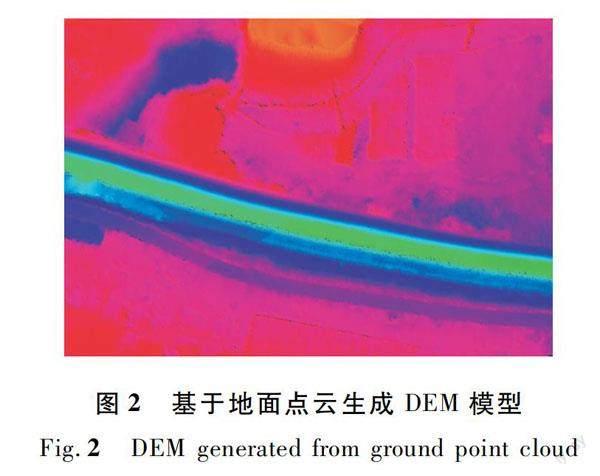
利用TerraSolid軟件對解算后無人機LiDAR點云數據進行去噪與地形濾波。啟用宏命令,進行點云自動分類,分出默認類、低點、地面點、植被點、建筑點等。然后,根據地面點生成可編輯模型,在模型上可以目視判別分類結果是否合理;使用Assign Point Class工具直接在可編輯模型上的異常位置單擊,即可將錯分的地面點重分為默認類,同時可編輯模型也會實時更新。最后,使用tphoto模塊將DOM添加到TerraSoild軟件;通過點云與DOM疊加,還可與可編輯地面模型關聯查看,目視檢查有無錯分、漏分,使用分類編輯工具進行修改,整個圖幅檢查修改完畢后,保存修改后的點云。
分類后的地面點云與地面RTK實測檢查點進行合理性比對,并生成DEM(見圖2),用于濾波結果目視判別與精度統計,以及后期與DOM融合處理。
1.4 影像和LiDAR數據融合處理
利用Global Mapper軟件對解算后的三維LiDAR點云數據與DOM進行配準、融合處理。點云根據XY平面坐標在DOM上重采樣得到光譜信息,生成帶有RGB真彩色信息的三維點云,它不僅具有精準的空間結構信息,還具備豐富的地物紋理信息,便于后期數據的矢量編輯。
1.5 實景三維模型生成
將LiDAR點云數據與傾斜攝影數據進行配準,并將配準后的數據導入ContextCapture軟件。通過ContextCapture軟件的Merge Blocks功能,將兩組數據進行融合處理,然后再次提交空三解算任務。此時,LiDAR點云數據與傾斜攝影密集匹配點云同步解算。空三解算任務完成后,得到融合后目標測區的實景三維模型。
融合LiDAR點云與傾斜影像的三維建模,一方面可以減少因影像失配造成的模型扭曲和數據缺失,從而提高模型精細度;另一方面,可直接從LiDAR點云提取地物特征點或激光反射差異特征點作為像控點,在河道灘涂區域布設像控點困難時,實現免像控點地面測量的無人機航測。
1.6 地物測繪產品生成
地物測繪采用EPS軟件,通過人機交互方式來完成。EPS是一款集數據采集、成圖、編輯處理與數據入庫的多功能模塊化地理信息軟件,其三維測圖模塊支持多種無人機航測成果協同作業,可顯著提高航測成果內業利用率,并有效保證河道測繪成果的可靠性與精確性。
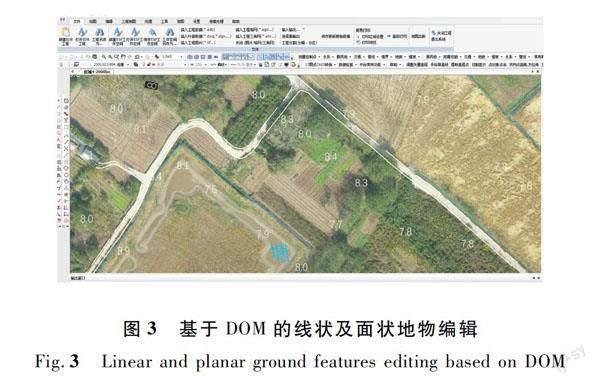
(1) 基于DOM的地物編輯。
正射影像數據分辨率高、色彩豐富、結構單一,非常適用于道路邊、水邊等線狀符號以及草地、林地等面狀地物的繪制,如圖3所示。
(2) DOM與LiDAR點云協同的地物編輯。
在EPS中同時加載LiDAR原始三維點云與DOM,并將點云按高程分層設色,可以直觀反映出植被覆蓋下真實地表起伏特征,以此來繪制坡、坎等特征地物符號,并自動提取地面高程信息,如圖4所示。
(3) DOM與真彩色三維點云協同的地物編輯。
EPS三維測圖模塊提供多種點云顯示方案,其中“點云真彩色顯示”可以360°全方位展示地物三維空間信息及紋理信息,輔助判繪地物,如圖5所示。
另外,針對易被樹木遮擋的防洪墻、圍墻、房屋等高程值突變、帶有輪廓特征的地物,采用EPS軟件的“剖面與投影”功能,可輔助顯示、識別該類地物,并提取相應高程值,如圖6所示。
(4) 三維實景模型輔助繪圖。
在EPS工程中加載測區“傾斜模型”,采用融合機載LiDAR點云與傾斜影像生成的測區實景三維模型,可有效滿足大比例尺地形對地物精細化測圖的要求。例如堤防材質、坡線長度、房屋材質及樓層數、圍墻、電桿等地物都可以清晰直觀地在實景模型中呈現,輔助內業人員采集相應地物信息,如圖7所示。
2 實驗與分析
實驗區為長江下游蕪裕河段,數據采集時間為2021年10月。測區堤外側植被覆蓋度較高,有企業、廠房等設施,堤內側有成片居民房屋。數據采集設備包括大疆精靈四RTK一套、北科天繪“云雀”無人機LiDAR系統一套、GNSS接收機3套。其中,大疆精靈四RTK無人機航線規劃參數為相對航高150 m,航向與旁向重疊度均為70%,如圖8(a)所示;飛行1個架次,耗時約20 min,共獲取垂直拍攝影像216幅。同時,利用大疆精靈四RTK無人機自帶的3D飛行模塊,對測區實施交叉航線傾斜攝影,相機傾角為40°,航向、旁向重疊度均設置為75%,如圖8(b)所示。共起降作業2架次,用時45 min,獲取測區傾斜照片436幅。
實驗采用北科天繪“云雀”無人機LiDAR系統獲取測區點云數據,掃描航線布設如圖8(c)所示,設置相對航高150 m,航速8 m/s,旁向重疊度55%。另外,在植被茂密區域,采用往返航線方式加密航線,原始點云密度不少于80~100點/m2。累計掃描作業1個架次,用時約20 min,共獲取LAS格式原始點云數據約10 GB。
在測區均勻布設了6個像控點,并按不同地物特征布設了30個檢查點,包含硬質路面、草地、蘆葦地、林地等,通過地面RTK實測,建立定位精度驗證數據集。
采用本文技術方法,綜合利用多種無人機航測成果,繪制測區大比例地形圖如圖9所示。將測繪成果與地面實測RTK檢查點進行比對,定位誤差統計結果如表1所列,可滿足1∶1 000比例尺地形圖測繪的平面與高程精度要求。
3 結 語
與傳統方法及單一無人機遙感方式相比,本文研究的無人機LiDAR與攝影測量數據采集與數據融合處理方法具有以下顯著優勢。
(1) 采用非接觸式測量,顯著提高了數據采集效率;通過數據融合,顯著提高了地形測繪產品生成的效率。
(2) 適用于長江中下游河道大比例尺地形測繪,可同時解決岸灘區域植被高密度覆蓋與建筑物復雜多樣的地物測繪難題。
(3) 有效發揮了影像數據紋理豐富、LiDAR數據高精度的互補優勢,有力保證了地形測繪的準確可靠性,可滿足1∶1 000比例尺地形圖測繪的精度要求。
(4) 產品直觀、精細、多樣化,助力“數字河道”向精細化方向發展。
本文方法仍需地面人工測繪少量像控點,基于LiDAR點云的高精度像控點提取,實現免地面像控點設測的無人機航測,解決人員難以到達的灘涂區域的地形測繪難題,將在后續開展對該方法的繼續研究。
參考文獻:
[1]劉世振,鄧建華,馮國正,等.機載LiDAR在山區型河道地形測繪中的適用性研究[J].人民長江,2021,52(1):108-113.
[2]戴永洪,劉林佳.無人機機載激光雷達在長江中游河道地形測量中的應用[J].水利水電快報,2022,43(增2):13-17.
[3]WANG H,YANG B,JIANG J P,et al.Real-time extraction of water surface boundary using shipborne radar[J].International Journal of Remote Sensing,2020,41(7):2739-2758.
[4]SCOTT DN,BROGAN D J,LININGER K B,et al.Evaluating survey instruments and methods in a steep channel[J].Geomorphology,2016,273(15):236-243.
[5]王華,蔣建平,周建紅,等.船基雷達實時自動化水邊界測繪方法研究[J].人民長江,2020,51(11):76-82.
[6]周建紅,馬耀昌,劉世振,等.水陸地形三維一體化測量系統關鍵技術研究[J].人民長江,2017,48(24):61-66.
[7]許寶華,劉世振.機載LiDAR測量技術在潮間帶測量中的應用[J].人民長江,2019,50(11):108-113.
[8]WEI L X,YANG B,JIANG J P,et al.Vegetation filtering algorithm for UAV-borne LiDAR point clouds:a case study in the middle-lower Yangtze River riparian zone[J].International Journal of Remote Sensing,2017,38(8-10):2991-3002.
[9]周建紅,楊彪,王華,等.海量低空機載LiDAR點云的地形斷面快速生成算法[J].測繪科學技術學報,2018,35(2):170-174.
[10]周建紅,馮傳勇,楊彪.低空機載LiDAR水面點云自適應分類算法研究[J].人民長江,2018,49(18):80-85.
[11]UYSAL M,POLAT N.Investigating performance of airborne LiDAR data filtering with triangular irregular network(TIN) algorithm[J].The International Archives of Photogrammetry (Remote Sensing and Spatial Information Sciences),2014,40(7):199-202.
[12]MENG X L,CURRIT N,ZHAO K G.Ground filtering algorithms for airborne LiDAR data:a review of critical issues[J].Remote Sensing,2010,2(3):833-860.
[13]鄒娟茹,孫興華.多源數據融合構建精細三維模型的關鍵技術[J].地理空間信息,2021,19(12):131-135.
[14]張勇勇.多源數據融合在灘涂地形測量中的應用[J].工程勘察,2021(11):67-71.
[15]楊必勝,梁福遜,黃榮剛.三維激光掃描點云數據處理研究進展、挑戰與趨勢[J].測繪學報,2017,46(10):1509-1516.
[16]尚大帥,馬東洋,高振峰,等.機載LiDAR點云數據與影像融合[J].測繪工程,2012,21(1):18-21.
[17]ROTTENSTEINER F.Automatic generation of high-quality building models from LiDAR data[J].IEEE Computer Graphics and Applications,2003,23(6):42-50.
[18]SECORD J,ZAKHOR A.Tree detection in urban regions using aerial lidar and image data[J].IEEE Geoscience and Remote Sensing Letters,2007,4(2):196-200.
[19]THUY T,FUMIO V,YAMAZAKI M M.Multi-scale solution for building extraction from LiDAR and image data[J].International Journal on Applied Earth Observation and Geoinformation,2009,11(4):281-289.
[20]CAO Y,WEI H,ZHAO H,et al.An effective approach for land-cover classification from airborne lidar fused with co-registered data[J].International Journal of Remote Sensing,2012,33(17-18):5927-5953.
(編輯:劉 媛)
River topographic surveying method integrating UAV LiDAR and photogrammetry
SHA Hongliang,LU Dezhong,FU Kang,LI Shuming
(Lower Changjiang River Bureau of Hydrological and Water Resources Survey,Hydrology Bureau of Changjiang Water Resources Commission,Nanjing 210011,China)
Abstract:
In order to solve the problem of low vegetation penetration rate of UAV photogrammetry and the difficulty in extracting ground objects from UAV LiDAR (Light Detection and Ranging) point cloud,a high-precision river topographic mapping method integrating UAV photogrammetry and LiDAR was proposed.In this method,DEM (Digital Elevation Model) with high resolution was extracted from the LiDAR point cloud by ground filtering,the true color 3D point cloud was generated through the fusion of LiDAR point cloud and DOM (Digital Orthophoto Map),the real scene 3D model was reconstructed by the fusion of LiDAR point cloud and digital images,and then the accurate mapping of ground features was realized.The typical application results showed that this method could give full play to the complementary advantages of the two technologies,and could solve the problems of high-density vegetation covered geomorphic surveying and ground features extraction of diverse buildings in the river bank area of the lower Yangtze River.The data acquisition and processing were efficient,the products were intuitive,fine and diversified,and the accuracy could meet the requirements for 1∶1 000 large-scale topographic mapping.
Key words: UAV;photogrammetry;LiDAR;river topographic surveying;middle and lower reaches of Yangtze River
收稿日期:2022-02-18
基金項目:安徽省教育廳無人機開發及數據應用重點實驗室開放基金項目(WRJ19005)
作者簡介:沙紅良,男,高級工程師,碩士,主要從事水文水資源勘測方面的研究。E-mail:276955298@qq.com
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
