VTHL運載器再入返回預設時間滑模控制
2023-06-28 09:12:22徐世昊關英姿浦甲倫韋常柱
航空學報 2023年7期
徐世昊,關英姿,浦甲倫,韋常柱
哈爾濱工業大學 航天工程系,哈爾濱 150001
垂直起飛水平著陸(Vertical Takeoff Horizontal Landing,VTHL)可重復使用運載器因其低成本、高效天地往返的優勢,得到了世界各航天強國的高度重視及廣泛研究,迎來了快速發展的契機[1]。再入飛行段作為VTHL運載器任務流程中的重要環節,是保證可控回收、重復使用的關鍵,而姿態控制系統是安全可靠完成再入飛行的重要保障。VTHL運載器再入返回初始條件散布大,且再入過程需經歷大幅姿態調整,對控制系統的收斂時間及動態響應特性提出了較高要求。運載器模型存在較強的非線性與耦合特性、模型參數不確定性強[2],且再入飛行環境復雜、內外擾動大[3],因而控制系統需具備強抗干擾能力與魯棒性。
針對運載器再入返回姿態控制問題,增益調度[4]、反步[5-6]、軌跡線性化[7]、自抗擾[8]、滑模[9]等線性/非線性控制方法已得到了廣泛應用。其中滑模控制因其響應速度快、控制精度高、魯棒性強等優勢,是解決參數不確定性與擾動影響下運載器再入姿態控制問題行之有效的途徑之一[10]。
傳統線性滑模控制僅能保證系統狀態在無窮時刻收斂,難以滿足模型參數不確定性與擾動影響下運載器姿態控制誤差收斂速度與精度需求。因此收斂時間有界的滑模控制方法更適用于運載器的再入姿態控制。文獻[11]設計了二階滑模控制律,實現了再入姿態控制誤差在有限時間內收斂。文獻[12]考慮干擾力矩,設計了多變量自適應Super-twisting有限時間滑模控制律。文獻[13]采用有限時間擴張狀態觀測器對再入過程中擾動量觀測補償,減弱了滑模控制的抖振問題。文獻[14]基于新型快速終端滑模面,設計內外回路有限時間控制律,并引入一階濾波器避免控制量奇異。上述有限時間滑模控制(Finite Time SlidingMode Control,FTSMC)方法雖可實現系統的收斂時間有界,但收斂時間上界仍與系統的初始狀態相關。而VTHL運載器主動段制導控制累積誤差易造成再入初始條件較大散布,導致系統收斂時間不可控,一定程度上限制了其應用。
為使收斂時間上界與系統初始狀態無關,即實現固定時間收斂,文獻[15]基于非奇異終端滑模及分數階狀態反饋設計控制律,使姿態控制誤差在固定時間內收斂。文獻[16]利用加權齊次性方法構造雙冪次自治系統,基于此系統設計固定時間再入姿態控制律。文獻[17]在滑模控制中引入固定時間收斂觀測器(Fixed-Time Extended State Observer,FxTESO),在保證固定時間收斂的同時減弱了控制量的抖振。文獻[18]采用精確魯棒微分器與終端滑模方法設計固定時間控制律,并引入補償函數避免控制量出現奇異。然而上述固定時間滑模控制(Fixed-Time Sliding Mode Control,FxTSMC)方法作用下,系統收斂時間上界由多個控制參數組成的復雜函數決定,難以由簡單的函數關系直接確定,為設計工作帶來了困難。
上述提到的滑模控制方法雖可實現系統收斂時間可控,但其上界仍未完全與系統初始狀態無關,且與各控制參數間的關系不夠明晰。然而對于VTHL運載器再入飛行過程,控制系統收斂時間的設計至關重要:過小的收斂時間易引發執行機構飽和,并易激發彈性振動等附加動力學行為;過大的收斂時間將影響系統動態響應性能,易造成控制誤差累積,甚至影響水平著陸精度。因此,如何在模型參數不確定性與擾動影響下,使VTHL運載器姿態控制誤差收斂時間上界與初始狀態無關,形式簡單且可由具明顯意義的控制參數預先設定,即實現預設時間收斂,是一個值得研究的問題。
基于上述分析,本文重點研究VTHL運載器水平再入返回過程中,存在模型參數不確定和外部干擾的預設時間滑模控制(Predefined-Time Sliding Mode Control,PTSMC)方法,使得姿態角控制誤差在預設時間內收斂,設計了一種新型預設時間滑模面,并在此基礎上結合預設時間擴張狀態觀測器,設計VTHL運載器預設時間滑模控制律。基于Lyapunov理論證明閉環控制系統的預設時間穩定性,最后通過對比仿真驗證所提方法的有效性。
1 VTHL運載器動力學與控制模型
VTHL運載器的動力學模型包括質心與繞質心的運動方程,其中質心運動方程可參見文獻[19],繞質心轉動的動力學方程為
式中:ωb為姿態角速率向量,ωb=[p,q,r]T,p、q、r分別為滾轉、俯仰和偏航角速率;ω×b為ωb的叉乘矩陣;Mc為氣動舵面與反作用控制系統共同產生的控制力矩;ΔM為運載器本體產生的氣動力矩及外部干擾力矩;I=ˉ+ΔI為轉動慣量矩陣ˉ及ΔI分別為其標稱與不確定部分。
繞質心轉動的運動學方程為
式中:α、β、σ分別為攻角、側滑角和傾側角;γ為飛行路徑角;ψ為航向角;θ和?分別為經度和緯度;ωe為地球自轉角速率。
將式(2)改寫為
式中:姿態角向量為Ω=[α,β,σ]T;F的表達式可由(2)直接得出,在此省略;
對式(3)求導得:
定義姿態指令為Ωc=[αc,βc,σc]T,姿態控制誤差為,則可得到誤差動力學系統為
定義H=F1+ΔD-Ω?c,建立控制模型為
假設1系統(6)中總擾動H的一階導數H?有界,且滿足
本文目標為設計控制量Mc,使得在模型參數偏差及外界干擾影響下,姿態角Ω在預設時間Tp內跟蹤制導指令Ωc,即
2 預備知識
2.1 符號說明
本文中,R表示實數集合,R+表示正實數集合,Rn和Rn×n分別表示n維實向量空間和n×n階實矩陣集合;‖·‖表示向量的Euclidean范數,λmin(·)表示矩陣的最小特征值,min{·}表示給定集合中的最小值。
對于任意的a∈R+和x∈R,定義函數siga(x)=sign(x)|x|a,sign(x)表示符號函數,|·|表示絕對值。對于向量ν=[ν1,ν2,…,νn]T,定義signa(ν)= [signa(ν1),signa(ν2),…,signa(νn)]T,siga(ν)=[siga(ν1),siga(ν2),…,siga(νn)]T,Arctan(v)=[arctan(v1),arctan(v2),…,arctan(vn)]T,νa=
2.2 穩定性定義與引理
考慮自治系統:
式中:x∈Rn為狀態變量,初值為x0=x(0)∈Rn;代表自治系統中可調參數;f:Rn→Rn為非線性函數。假設系統(8)的解為Φ(t,x0),且平衡點為原點。
定義1若系統(8)的原點是全局漸進穩定的,且Φ(t,x0)在有限時間內到達平衡點,即Φ(t,x0)=0,?t≥T(x0),T(x0):Rn→R+{0}為收斂時間函數,那么系統(8)的原點是全局有限時間穩定的[22]。
定義2若系統(8)的收斂時間函數T(x0)有上界,即?Tmax>0:?x0∈Rn:T(x0)≤Tmax,那么系統(8)的原點是固定時間穩定的[23]。
定義3若系統(8)是固定時間穩定的,且存在參數?及常數T>0,使得?x0∈Rn:T(x0)≤T,那么系統(8)的原點是預設時間穩定的,T為預設的收斂時間[24-25]。
定義4向量A=[a1,a2,a3]T與B=[b1,b2,b3]T的Hadamard積為
引理1針對系統(8),若存在一個徑向無界且正定的Lyapunov函數V(x)滿足如下關系:
式中:T>0;0<p<1;aˉ>0;>0;k>1;ζ=(k-1)/k。則系統(8)的平衡點是全局預設時間穩定的,且預設收斂時間為T。
證明考慮如下微分方程:
式中:ο>0。
將式(11)轉化為
對式(12)兩側同時積分,可得系統(8)的收斂時間函數為
引理2針對系統(8),若存在一個徑向無界且正定的Lyapunov函數V(x)滿足關系[26]:
式中:c>0;0<a<1。則系統(8)的平衡點是有限時間穩定的,且收斂時間函數為
3 VTHL運載器預設時間滑模控制
基于姿態控制誤差動力學系統(6),本節控制律的設計思路為:首先基于反正切函數設計新型滑模面,使狀態量x1、x2在滑模面上預設時間收斂;隨后設計預設時間觀測器對擾動量H進行觀測與補償,以提高系統魯棒性并減弱控制抖振;最終結合滑模面S與擾動觀測值Z3設計控制律Mc,使滑模面在預設時間內到達,姿態控制誤差x1、x2在預設時間內收斂。本文控制律的結構如圖1所示。

圖1 VTHL可重復使用運載器預設時間滑模控制框圖Fig.1 Schematic diagram of PTSMC for VTHL reusable launch vehicle
3.1 預設時間滑模面設計
為使狀態量x1、x2在滑模面上的收斂時間不依賴于初始狀態,可由單一參數調節且滑模面對時間的一階導數中不出現奇異項,設計預設時間滑模面為
定理1如果滑模面S=0,x1、x2將在預設時間Ts內收斂至原點。
證明不失一般性,考慮Si=ξ1i+由文獻[27],Si=0時有:
定義Lyapunov函數V1=,對其求導有
3.2 預設時間擴張狀態觀測器設計
傳統滑模控制的抖振問題,是魯棒增益項ηsign(S)引起的,該項可消除擾動量H的影響,但擾動越大時η設計得越大,控制量抖振越嚴重。本文采用預設時間擴張狀態觀測器(Predefined-Time Extended State Observer,PTESO)對H觀測與補償,此時ηsign(S)項僅需補償PTESO對H的觀測誤差。PTESO設計合理時觀測誤差足夠小,因此η也可以足夠小,從而削弱控制量的抖振。同時PTESO可使觀測誤差在預設時間TE收斂,保證了控制系統整體的預設時間收斂性。
設計的PTESO為
式中:TE>0為PTESO的預設收斂時間;?(t,TE)為切換函數,0≤t<TE時?(t,TE)=1;t≥TE時?(t,TE)=0;hi、gi(i=1,2,3)分別為0≤t<TE及t≥TE時的修正項。
定義觀測誤差e1=Z1-x1,e2=Z2-x2,e3=Z3-H,則觀測誤差的動力學方程為
當0≤t<TE時,PTESO的修正項設計[28]為
式中:μ=的選擇需保證矩陣是Hurwitz的。hi(i=1,2,3)項可使ei(i=1,2,3)在0<t≤TE內有界,并在預設時間TE收斂至0。
當t≥TE時,PTESO的修正項采用Levant的精確魯棒微分器[29]:
定理2對于系統(6),采用式(19)所示PTESO,觀測誤差ei(i=1,2,3)在0<t≤TE內有界,在t→TE時收斂至0,并在t≥TE內保持為0。對于0≤t<TE及t≥TE內PTESO收斂性的證明,可分別參見文獻[28-29]。
注1雖然觀測器修正項g3中包含sign離散項,但后續在控制律設計中用于擾動補償的信號為Z3,這一項是連續的。
3.3 預設時間滑模控制律設計
為利用引理1使滑模面在預設時間內到達,且避免控制量的奇異,基于滑模面(16)及觀測器(19)設計VTHL運載器預設時間滑模控制律為
正弦補償函數μι(x)表達式為
式中:ι>0為小常數;易知μι(x)的引入可避免控制量的奇異。
注2由μι(x)的定義可知0時消除了Mc2中的負冪次項從而避免了ξ2=0且S≠0時控制量Mc的奇異問題。
定理3針對VTHL運載器控制模型(6),采用式(23)所示的控制律,姿態控制誤差x1、x2將在t≤TE+Ts+Tc+ε(ι)內收斂,ε(ι)表示與ι相關的最小時間區域,且
證明t≤TE時,由定理2可知PTESO的觀測誤差是有界的,因而系統狀態亦是有界的。t>TE時Z3=H,定義Lyapunov函數V2=,對其求導并將式(23)代入可得
當S≠0時,將ξ1,ξ2∈R3構成的狀態空間劃分為2個區域:
當(ξ1,ξ2)位于R1時,從而式(25)為
進而由引理1知系統狀態將在預設時間Tc+TE內到達S=0或進入區域R2。
當(ξ1,ξ2)位于R2時,由式(25)知S=0仍為系統的一個吸引子,僅需證明ξ2=0上除原點外的其他點均不是吸引子。
當ξ2=0時x2=0,且Λ為零矩陣,此時控制律(23)變為
對ξ2求導,并將控制律(28)代入可得
綜上所述,S=0將在t≤Tc+TE+ε(ι)內到達,隨后x1、x2將沿著滑模面(16)在t≤Ts+Tc+TE+ε(ι)內收斂至原點,定理3得證。考慮到,在ι設置為小量時,忽略(ξ1,ξ2)穿越R2的時間ε(ι)具有實踐意義[30],從而t≤Ts+Tc+TE。
3.4 控制參數設計方法
控制參數按作用機理可分為兩類:一類影響姿態控制誤差收斂時間,包括Ts、Tc和TE;另一類影響姿態控制誤差收斂動態過程,包括滑模面(16)中κ、γ1、γ2,觀測器(19)的li、ki(i=1,2,…,3)及L、v,控制律(23)的與η。
第1類參數設計方法,Ts決定姿態控制誤差x1、x2在滑模面的收斂時間上界,Tc決定滑模面S趨近于0的時間上界,而TE決定觀測誤差Z3收斂至H的時間,三者之和決定x1、x2的收斂時間上界。選取較小的Tc與Ts雖有利于x1、x2的快速收斂,但控制量的需求較大;選取較小的TE雖可使擾動觀測誤差快速收斂,但會加劇觀測器的“峰值效應”。此類參數應綜合考慮以上因素適當選取。
第2類參數的設計方法,根據控制器的結構分為3個方面:
1) 滑模面的設計參數:γ1、γ2均為正奇數且γ1<γ2<2γ1;γ1/γ2與輔助變量ξ1,ξ2在滑模面上的收斂速度正相關;在ξ1,ξ2動態特性相同時,增大κ可提高x1、x2的收斂速度。但收斂速度的提升會增大控制量,故需適當選取。
2) 觀測器的設計參數:li(i=1,2,3)與v的值越大,0<t<TE內觀測器的“峰值效應”越顯著,故需在滿足觀測器收斂條件的前提下減小這些參數。而t≥TE時觀測器切換為Levant的魯棒精確微分器,其參數L與ki(i=1,2,3)的選取規律可參考文獻[29]。
3) 控制律的設計參數:增大p與k可改變Mc2中冪次系數1-2ξp與1+2ξp,提高滑模面趨近速度;而αˉ、βˉ可改變冪次項前的比例系數,αˉ/βˉ的大小與滑模面趨近速度正相關,但趨近速度的提升會增大控制量,故需適當選取;ι可在避免控制量奇異的前提下設計為小常數;η可補償有限采樣頻率下擾動的觀測誤差,可根據PTESO穩態觀測精度設計。
4 仿真分析
運載器總體及氣動參數見文獻[31]。選取典型再入返回軌跡仿真分析:再入初始速度2 914 m/s,高度61.2 km,經度108.85°,緯度39.31°,彈道傾角-18°,航向角為107.44°;再入過程中運載器改變攻角調節升力,保持側滑角為0,并適時翻轉傾側角調節側向力改變航向,以調整軌跡實現再入返回。0~30 s攻角指令αc=(45-t/2)°,30 s后αc=30°;側滑角指令βc=0°;傾側角指令在0~20 s及30 s后為σc=0°,20~30 s為σc=5°,采用傳遞函數1/(0.01s+1)3的濾波器對αc、σc平滑處理。
仿真中設置運載器轉動慣量偏差10%,大氣密度偏差20%;外界干擾力矩的各分量均為(1+sin(t))×104N·m[32]。
4.1 控制律預設時間收斂性
以運載器俯仰通道為例,驗證控制律的預設時間收斂特性。設定3組預設時間參數,分別為Tc=2 s、Ts=1 s,Tc=1 s、Ts=1 s及Tc=1 s、Ts=2 s,其他控制參數見表1。針對6組初始再入姿態角α0仿真,α0設置見表2,仿真結果如圖2~圖4所示。圖中星形標記代表攻角誤差α-αc的預設收斂時間Ts+Tc+TE;三角形標記代表俯仰通道滑模面的預設收斂時間Tc+TE。

表1 PTSMC參數值Table 1 Parameter values of PTSMC

表2 再入姿態角初始條件Table 2 Initial conditions for attitude angles in reentry phase

圖2 Tc=2 s,Ts=1 s時仿真結果Fig.2 Simulation results with Tc=2 s,Ts=1 s
綜合以上仿真結果,在不同α0的設定情況下,滑模面均可在Tc+TE內收斂,姿態控制誤差與角速率均可在Tc+TE+Ts內收斂。對比圖2和圖3仿真結果,對參數Tc的調節可改變滑模面到達時間;對比圖3與圖4仿真結果,對參數Ts的調節可改變姿態控制誤差與角速率在滑模面上的收斂時間,從而驗證了本文控制律的預設時間收斂特性。

圖3 Tc=1 s,Ts=1 s時仿真結果Fig.3 Simulation results with Tc=1 s,Ts=1 s

圖4 Tc=1 s,Ts=2 s時仿真結果Fig.4 Simulation results with Tc=1 s,Ts=2 s
4.2 控制性能對比
為進一步驗證將本文所提出控制律的性能,與文獻[32]中基于魯棒自適應增益的FTSMC及文獻[17]中基于FxTESO的FxTSMC進行對比仿真。VTHL運載器姿態角初值設置為α0=47°,β0=2°,σ0=2°,姿態角速率初值均為0(°)/s。綜合考慮控制力矩幅值與姿態控制誤差收斂時間要求,設置Tc=2 s,Ts=2 s,其他控制參數見表1。調節FTSMC與FxTSMC控制律參數使得3類控制律的收斂時間相近,具體參數設置見表3。為抑制FTSMC的抖振現象,采用雙曲正切函數代替sign函數。

表3 FTSMC與FxTSMC參數值Table 3 Parameter values of FTSMC and FxTSMC
評估3類控制律性能的指標及選取依據為
1)均方根誤差(Root Mean Square Error,RMSE)指標可評估再入飛行時間段內的平均控制誤差:
2)時間絕對誤差積分(Integral Time Absolute Error,ITAE)指標再入過程中VTHL運載器可用的修航時間逐漸縮短,姿態控制誤差x1對終端精度的影響逐漸提高。ITAE指標考慮了以上關系,將時間τ作為|x1i(τ)|(i=1,2,3)的權重,以評估再入飛行時間段內的累積控制誤差。
6自由度對比仿真結果如圖5~圖11所示,圖中,對比方法1代表FTSMC,對比方法2代表FxTSMC。
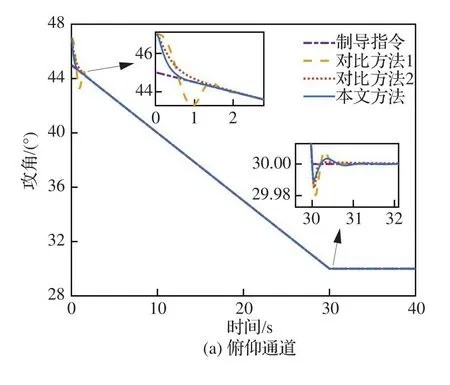

圖5 不同控制律作用下姿態角變化曲線Fig.5 Time histories of attitude angles with different controllers
由圖5中姿態角變化曲線及圖6中姿態角速率變化曲線可知,相較于其他兩類控制方法,PTSMC作用下姿態控制系統響應速度更快且無振蕩,姿態控制誤差收斂時間約3 s。由圖7可知PTSMC的滑模面收斂速度更快,收斂時間約2 s。說明PTSMC可通過冪次反饋項Γ1、Γ2加快滑模面與姿態控制誤差收斂速度;并利用PTESO對擾動的觀測與補償,避免魯棒自適應增益系數調節過程導致的響應振蕩,使控制系統動態性能更佳。

圖6 不同控制律作用下姿態角速率變化曲線Fig.6 Time histories of attitude angle rates with different controllers

圖7 不同控制律作用下滑模面變化曲線Fig.7 Time histories of sliding mode surfaces with different controllers
由圖8中擾動觀測值與觀測誤差曲線,觀測誤差可在TE=1 s時收斂,且觀測誤差的“峰值效應”較FxTESO小。說明了PTESO可利用修正項hi(i=1,2,3)實現觀測誤差的預設時間收斂,并減小FxTESO冪次修正項切換帶來的觀測誤差超調,從而進一步提升了控制系統動態性能。同時觀測誤差穩態值可由修正項gi(i=1,2,3)保持在0附近,保證了控制系統的穩態。

圖8 擾動觀測值與觀測誤差變化曲線Fig.8 Time histories of disturbance observation values and observation errors

由圖9中控制量變化曲線,PTSMC的控制量沒有出現奇異,說明了正弦補償函數的有效性。FTSMC在滑模面未到達時(0~2 s),魯棒自適應增益的調節使控制量抖振;在滑模面到達后為克服外部擾動,魯棒自適應增益仍較大,導致控制量抖振依然較PTSMC明顯,說明了PTESO對擾動的觀測與補償可減弱控制量抖振。

圖9 不同控制律作用下控制力矩變化曲線Fig.9 Time histories of control torques with different controllers
由圖10及圖11可見,PTSMC的RMSE與ITAE指標均更小,說明了本文控制律的平均控制誤差與累積控制誤差更小,這由控制律優良的動態和穩態性能保證的。
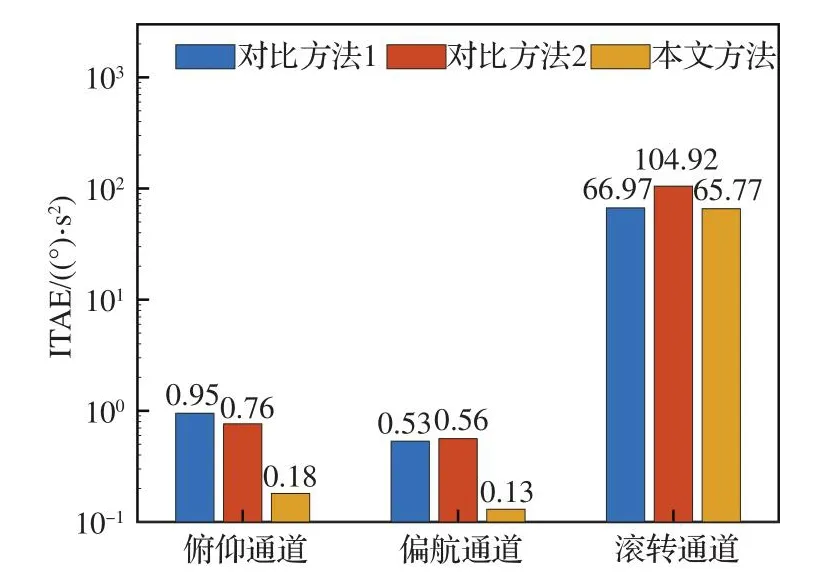
圖10 不同控制律作用的ITAE指標Fig.10 ITAE indices of different controllers

圖11 不同控制律的RMSE指標Fig.11 RMSE indices of different controllers
5 結論
1)基于雙曲正切函數設計了新型非奇異預設時間收斂滑模面,系統狀態量可在滑模面上實現預設時間收斂。
2)設計了VTHL運載器預設時間滑模控制律,基于Lyapunov理論證明了閉環控制系統的預設時間穩定性,姿態控制誤差的收斂時間上界與初始狀態無關,可由3個控制參數預先設定。
3)不同初值及控制參數Ts,Tc的仿真說明了本文控制律可實現姿態控制誤差的預設時間收斂,控制參數Tc與Ts可直接調節滑模面到達時間及姿態控制誤差在滑模面上的收斂時間。
4)與FTSMC與FxTSMC的對比仿真說明了本文方法控制量抖振小,且具有更佳的動態響應性能,更小的平均控制誤差及累積控制誤差。
本文在設計與仿真過程中,暫未考慮VTHL運載器再入返回過程中切變風、隨機干擾等擾動,未來將重點考慮此類擾動對控制系統帶來的影響,進一步完善預設時間滑模控制的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
