基于步態分析的帕金森病輔助診斷方法綜述
2023-07-03 14:11:36馬雪倩高福杰季長清汪祖民
計算機應用 2023年6期
秦 靜,馬雪倩,高福杰,季長清,3,汪祖民*
(1.大連大學 軟件工程學院,遼寧 大連 116622;2.大連大學 信息工程學院,遼寧 大連 116622;3.大連大學 物理科學與技術學院,遼寧 大連 116622)
0 引言
帕金森病(Parkinson's Disease,PD)是患者數量僅次于阿爾茨海默癥(Alzheimer's Disease,AD)的年齡相關性和神經退行性疾病[1]。1817 年,James Parkinson 在他的專著Essay on the Shaking Palsy中描述了PD 的相關核心臨床特征[2],PD因此而得名。據統計,全世界有700 多萬人患有PD[3]。PD在50 歲之前的人群中發病率較低,但是自60 歲之后,PD 發病率會增加5~10 倍。預計2030 年,全球將有900 萬人患有PD[4]。隨著病情的發展,PD 患者會因為身體機能喪失和行動受限而產生各種不良的情緒,進而影響患者的身體狀況。PD 早期難以發現,容易被忽視,導致錯過最佳的治療時間,且PD 病程長、致殘率高,目前尚無有效的治療方法,給患者家庭和社會帶來的負擔極為沉重。
Niyogi 等[5]最早利用步態信息作為特征進行身份識別,此后,步態識別得到快速的發展,并涌現出大量的步態識別方法[6]。近年來,研究人員逐漸將步態分析應用于PD 的智能診斷。目前,學術界已有不少基于步態分析的PD 診斷相關綜述文章,但大多數是對步態分析方法的某一方面的概述,并沒有進行全面系統的歸納。例如,文獻[7-8]中只回顧了可穿戴設備在評估PD 患者步態時空參數的應用,歸納了可穿戴設備在檢測患者步態凍結和跌倒的應用研究,忽略了非可穿戴設備在PD 診斷上的應用;同時,現有的基于非可穿戴設備的步態分析方法的綜述文章較少。為了彌補上述不足,本文總結了基于步態分析的PD 輔助診斷方法,對近年關于步態分析的文獻進行了匯總和分析,討論了PD 的嚴重性及異常步態的特征,將基于步態分析的PD 輔助診斷方法分為基于可穿戴設備的方法和基于非可穿戴設備的方法,并且針對現有步態分析方法存在的問題指明了未來的發展趨勢。圖1 為本文基于步態分析的PD 輔助診斷方法的整體框架。
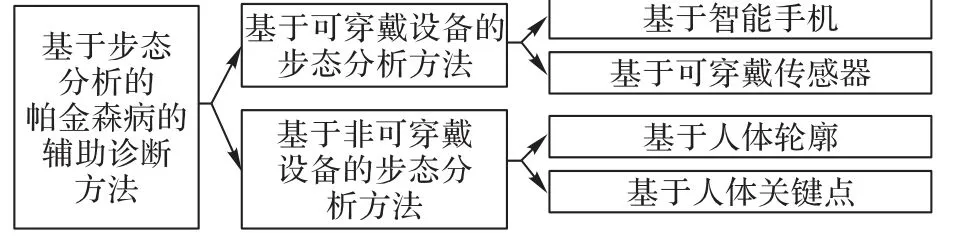
圖1 基于步態分析的PD輔助診斷方法Fig.1 Auxiliary diagnosis methods of PD based on gait analysis
1 步態異常與帕金森病
步態分析是一種有效的生物特征識別方式,它可以通過人體走路的姿勢識別人體身份。正常的步態具有周期性和節奏性,而異常步態特征十分復雜;研究表明,使用時空、運動學參數可以有效識別PD 患者的異常步態[3]。根據臨床表現可以將異常步態分為偏癱步態、截癱步態和慌張步態等,而PD 則會出現慌張步態的癥狀[9]。PD 患者的運動性障礙主要包含4 種:靜止性震顫、僵硬、運動遲緩和姿勢不穩定[7]。與健康對象相比,PD 患者會出現步態變化,如步幅縮短、行走時速度變慢和步頻加快。隨著疾病的發展,這些步態障礙會更加突出,甚至導致患者的跌倒,從而產生較多負面影響,如受傷、活動能力下降等[10],嚴重會導致骨折,甚至威脅生命安全。
傳統的PD 治療方案主要包括手術、藥物或者是積極的身心鍛煉[11]。在臨床上,專業醫生會利用運動康復評估中常用的評價量表統一帕金森氏病評定量表(Unified Parkinson’s Disease Rating Scale,UPDRS)[12]、步態凍結量表(Freezing of Gait Questionnaire,FoG-Q)[13]、新步態凍結量表(New FoG-Q,NFoG-Q)[14]、功能性步態評價(Functional Gait Assessment,FGA)量表[15]、站立行走(Time Up and Go,TUG)測試[16]和H&Y 量表(Hoehn and Yahr scale)[17]等評判PD 患者的運動障礙。整個過程會因醫生的主觀判斷造成評估結果差異。
隨著技術的快速發展,方便、可穿戴的傳感器已經能夠集成到臨床應用和日常生活活動中[18]。加速度、陀螺儀和磁強計等傳感器可作為慣性測量單元(Inertial Measurement Unit,IMU)單獨或組合使用,已成為基于室內量化步態模式方法的常見替代方法[19]。此外,基于視覺的步態識別方法通過PD 患者行走的視頻序列,從視頻中準確提取患者的步態特征,評估PD 患者的步態[20]。圖2 為基于步態分析的基本步驟。
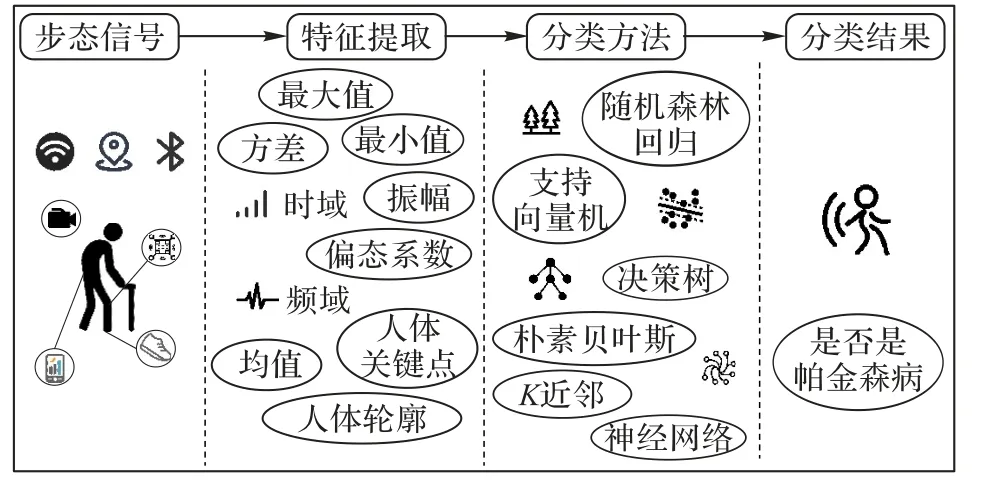
圖2 步態分析的基本步驟Fig.2 Basic steps of gait analysis
2 基于可穿戴設備的步態分析
可穿戴傳感器由于體積小、功耗低、準確率高和便于穿戴等特點,可長時間地動態監測PD 患者,在PD 早期診斷、鑒別診斷和病情評估等方面具有重要的意義。
2.1 可穿戴設備步態數據集
為了驗證和評估各種步態分析方法的可行性,研究人員搜集了不同的數據集,這些數據集中涵蓋了各種類型的步態數據,如加速度、角速度和垂直地面反作用力等。表1 整理了目前研究中常用的步態數據集。
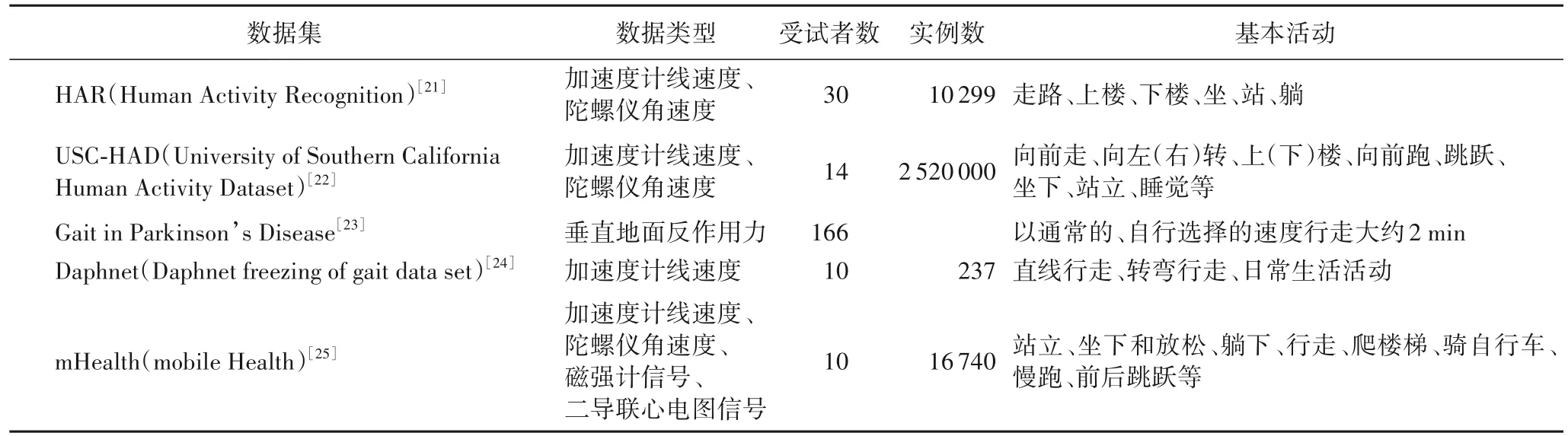
表1 可穿戴設備步態數據集Tab.1 Gait datasets of wearable devices
2.2 智能手機傳感器設備
隨著移動互聯網技術的快速發展,智能終端設備如智能手機、平板電腦等越來越普及。這些設備中存在各種內置的傳感器,如GPS(Global Positioning System)傳感器、加速度計和陀螺儀等。加速度計傳感器的三維(Three-Dimensional,3D)方向如圖3 所示。這些傳感器可以協同合作獲取患者在行走時步態數據,從而識別PD 患者的異常步態。
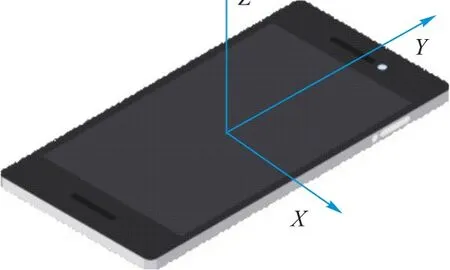
圖3 智能手機加速度計的3D方向Fig.3 3D orientations of smartphone accelerometer sensor
文獻[26-28]中開發并評估了基于智能手機的步態凍結(Freezing of Gait,FoG)檢測系統,利用智能手機中內置的3D加速度計或者陀螺儀,在人體的踝關節、腿關節和腰部等不同部位搜集PD 患者線速度和角速度,并應用機器學習算法檢測FoG 事件和PD 的嚴重程度。文獻[26]中為了避免手動設置閾值,引入AdaBoost.M1 算法生成弱學習分類器,并使用十倍交叉驗證以評估算法在實踐中的總體性能;文獻[27]中為了能更好地區分病理步態和生理步態,將設備中的數據采集和過濾與數據融合和模式識別技術相結合,并采用線性判別分析等9 種分類算法進行對比分析,實驗結果顯示,概率神經網絡(Probabilistic Neural Network,PNN)得到最高的準確率,可遠程監測患者的步態情況;文獻[28]中開發了一個應用程序“PD Dr”,將采集到的數據發送到云服務器中存儲和處理,使用支持向量機(Support Vector Machine,SVM)識別PD 患者的異常步態,并使用Lasso 回歸算法檢測PD 的嚴重程度。文獻[29-30]中同樣利用智能手機內置的傳感器,開發了基于智能手機的體系框架進行步態分析和檢測FoG 事件。文獻[29]中在采集受試者步態數據的同時,使用視頻記錄TUG 測試,同步視頻和加速度記錄數據,使用Moore-Bachlin 算法和添加有關步長信息的改進算法識別FoG 事件,實驗結果表明,改進后的算法性能得到明顯提升;文獻[30]中TUG 通過計算凍結閾值(FIth)和能量閾值(EIth)確定FoG 的發生,并將通過智能手機獲得的步態分析結果與現有的慣性儀器獲得的結果以及將檢測到的FoG 事件與臨床專業人員的評估進行比較分析,驗證FoG 檢測系統的準確性。表2 匯總了基于智能手機設備的步態分析方法,包含了具體的步態實驗方法和結果。其中,健康對照組為陰性(N)組,帕金森組為陽性(P)組,本文指標使用以下變量。
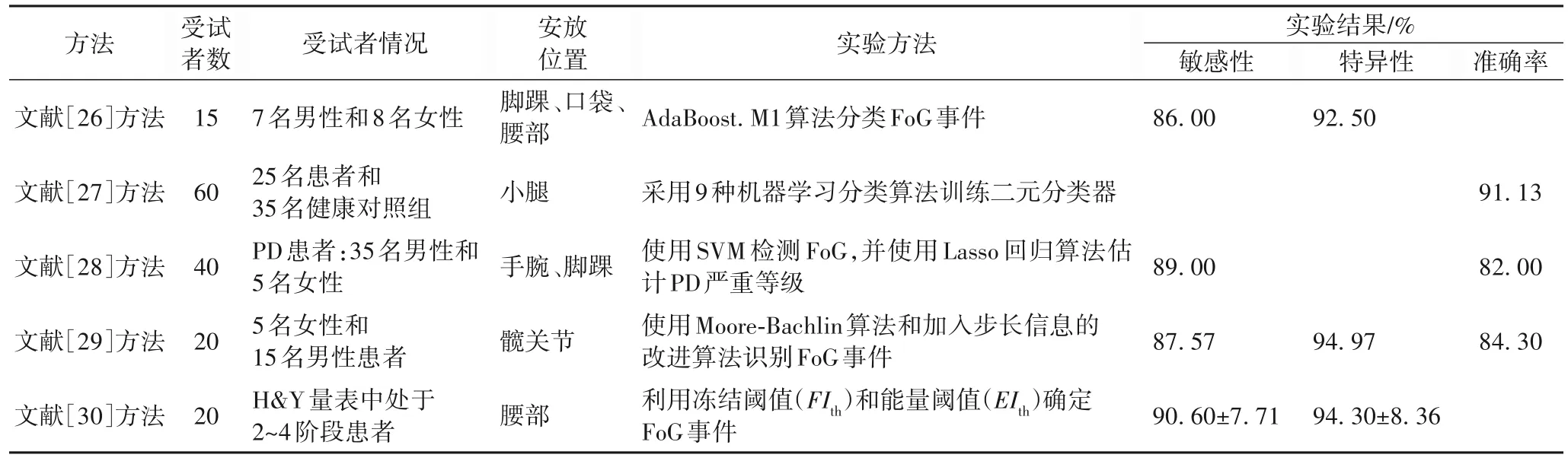
表2 基于智能手機設備的步態分析方法Tab.2 Gait analysis methods based on smartphone devices
1)真陽性數TP(number of True Positive):PD 患者被正確分類的數量。
2)真陰性數TN(number of True Negative):健康對照者被正確分類的數量。
3)假陽性數FP(number of False Positive):健康對照者被錯誤分類為PD 患者的數量。
4)假陰性數FN(number of False Negative):PD 患者被錯誤分類為健康對照者的數量。
本文指標敏感性(Sensitivity)、特異性(Specificity)和準確率(Accuracy)的計算方式如下:
2.3 使用可穿戴傳感器
對于不會使用智能手機的老年人,IMU 是應用最廣泛的可穿戴傳感器,小腿和腳是傳感器安放位置的首要選擇[18]。此外,也可以采用基于感知的壓力傳感器,將傳感器安裝在受試者的鞋上,提取患者的足部壓力特征,圖4[8]為帶有IMU的可穿戴傳感器電路板。
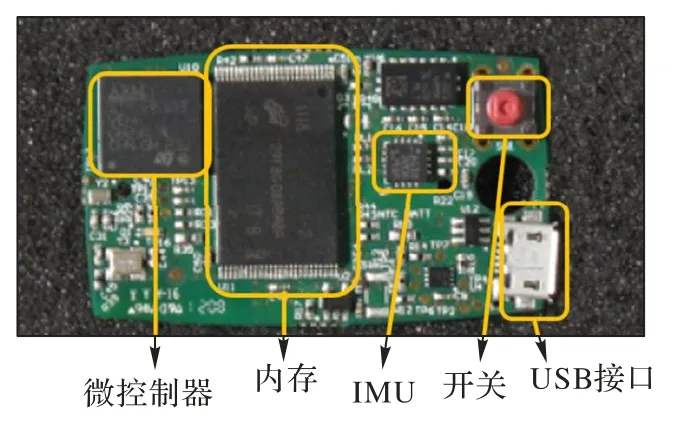
圖4 帶有IMU的可穿戴傳感器電路板Fig.4 Wearable sensor circuit board with IMU
2.3.1 四肢可穿戴設備
文獻[31-33]中提出一種新型的FoG 檢測系統,利用可綁定在人體背部、臀部和腳踝等四肢的三軸加速度計傳感器獲取患者的步態數據作為輸入,從原始數據中提取步態參數等特征,再使用較優的分類算法檢測FoG 事件。文獻[31]中以多通道加速度計信號作為輸入,使用一維深度卷積神經網絡(Convolutional Neural Network,CNN)自動學習特征表示,利用長短期記憶(Long Short-Term Memory,LSTM)網絡建模特征激活之間的時間依賴關系,并使用數據擴充消除不平衡數據集對模型訓練的影響,可以有效地檢測FoG 事件;文獻[32]中通過數據窗口和非線性降維,從原始數據中提取步態特征,再使用K近鄰(K-Nearest Neighbor,KNN)算法將步態分為pre-FoG、non-FoG 和FoG 這3 類,以減小FoG 發生的概率;文獻[33]中開發了一個不依賴于訓練集標簽的小批量k均值(k-means)聚類算法的可穿戴檢測系統,使用滑動窗口提取加速度計數據的熵作為檢測特征,通過k-means 聚類算法實現了在不標記訓練集的情況下自動生成FoG 和non-FoG聚類。文獻[34-35]中提出了PD 患者可穿戴的無線傳感系統,這些傳感系統均由若干個IMU 組成,用于搜集PD 患者的步態數據,通過步態分類算法識別被動的FoG 事件,在危險的情況下產生振動刺激的信號或者提供聽覺刺激,防止患者跌倒。文獻[34]中為了解決傳感器和PC 之間通信最大距離的問題,使用便捷式接收器(智能手機)與無線局域網連接,將數據傳輸到PC 端,對加速度計和陀螺儀信號融合獲得的數據進行時域分析,將角速度低通濾波后得到指數K,與校準后的閾值進行比較;文獻[35]中構建了一個由IMU 組成的無線傳感系統,將采集的步態數據存儲在處理器中,并通過藍牙傳輸到智能手機中,使用離散小波變換(Discrete Wavelet Transform,DWT)對步態數據進行處理以識別FoG事件。文獻[36]中提出了一個基于機器學習的評估步態特征的方法,使用可穿戴加速度計收集步態數據,根據評估的步態將PD 患者從健康老年對照組中分類出來,并使用Tinetti 移動測試(Tinetti Mobility Test,TMT)和3D 運動捕捉系統進行驗證。基于人體四肢的可穿戴設備所使用的傳感器、具體的步態分析方法和實驗結果如表3 所示,實驗結果的計算方法同表2。
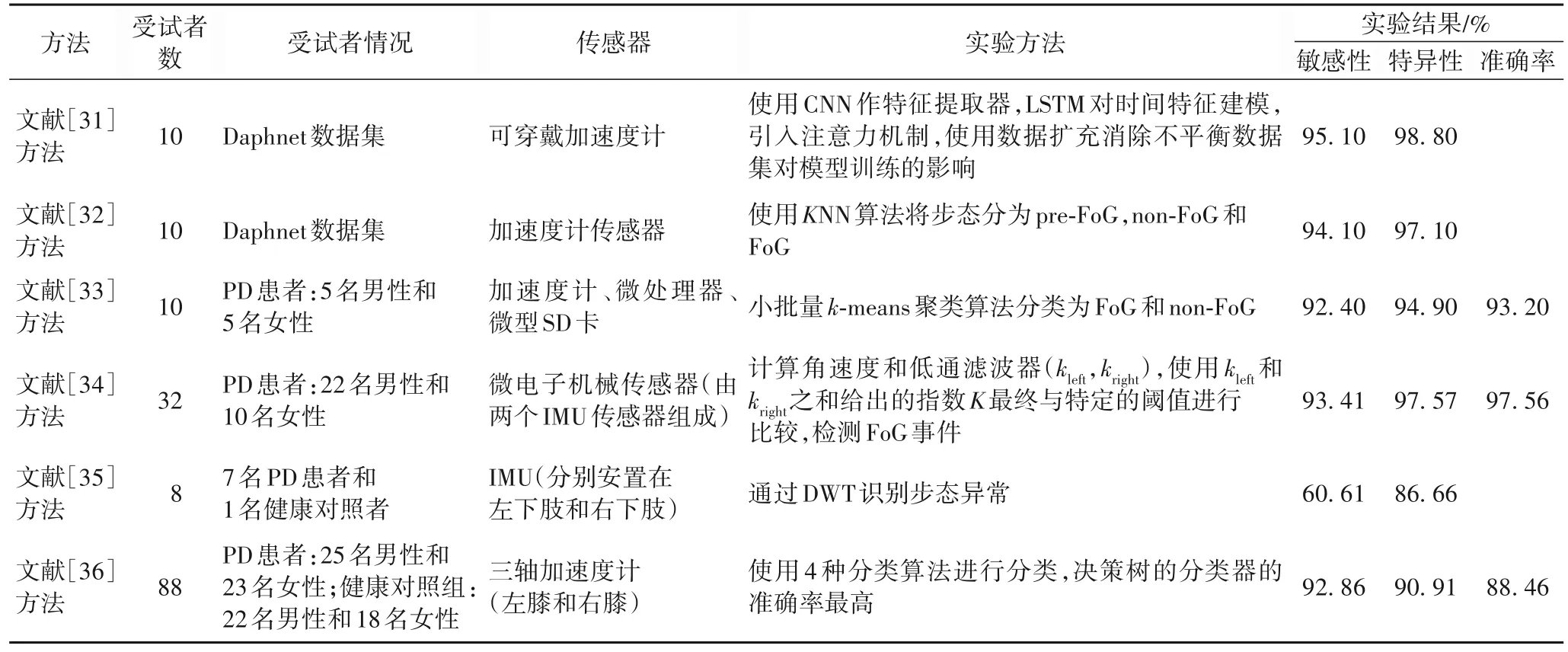
表3 基于四肢可穿戴設備的步態分析方法Tab.3 Gait analysis methods based on limb wearable devices
2.3.2 足部可穿戴設備
盡管上述傳感器可搜集到較為準確的步態數據,但將傳感器固定到人體四肢等關鍵部位,尤其是腿部,會給人造成不舒服的感覺。為此,研究人員提出基于感知的壓力傳感器技術,這種傳感器靈敏性較高,并通常被認為是檢測步態的標準,圖5[37]為基于加速度計傳感器的足底壓力鞋墊。
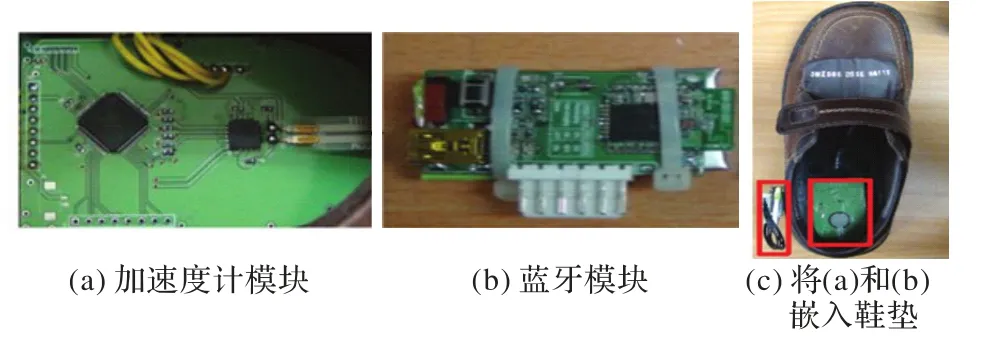
圖5 基于加速度計傳感器的足底壓力鞋墊Fig.5 Plantar pressure insole based on accelerometer sensor
文獻[37-38]中開發了配有3D 加速度計的壓力鞋墊傳感器系統,通過這些設備獲取加速度計數據并分析受試者在行走過程中的足部壓力變化,有效成為PD 患者在日常生活中的步態檢測系統。文獻[37]中應用了兩種能夠自動檢測FoG 事件的算法,一種是時域法[37],另一種是B?chlin 等[39]的頻域法。在所建議的時域法中,使用1D 垂直加速度信號和3D 信號分別與確定的閾值進行比較,確定是否出現FoG 事件;相較于傳統的頻域算法,時域法的計算量明顯減少。文獻[38]中采集了足部壓力分布、加速度和其他測量值等數據,使用了OpenGo(由Moticon 公司提供的創新純無線智能鞋墊傳感器和突破性的專業分析軟件)的一種算法,該算法可以通過壓力和加速度自動檢測各種FoG 的類型,并將采集的經過處理的數據與臨床醫生在視頻記錄中標記的數據進行比較,驗證該系統是否有效。不同于文獻[37-38]中是從正常步態中檢測FoG 事件,文獻[40-41]中開發并評估了新型的用于預測FoG 事件的方法,可以在早期預測跌倒并提前警示PD 患者。文獻[40]中提出并評估了一種利用步態過程中采集的足底壓力數據進行FoG 預測的新方法,將足底壓力數據作為二維圖像處理,并使用CNN 將它分類為pre-FoG、FoG 和non-FoG;文獻[41]通過對受試者的行走節奏、步幅大小和足部壓力分布等步態行走階段參數進行時域分析,提取主要參數,分析足部的重量分布,從而檢測步態模式。表4匯總了足部可穿戴設備使用的傳感器、具體的步態分析方法和實驗結果,實驗結果計算方法同表2。
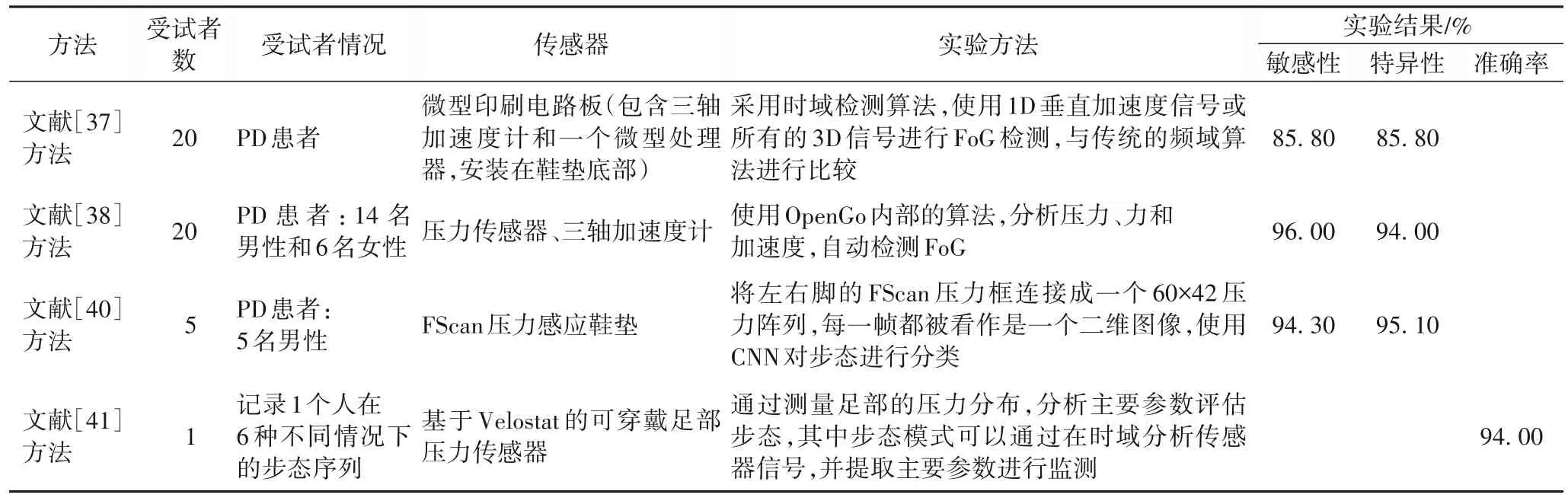
表4 基于足部可穿戴設備的步態分析方法Tab.4 Gait analysis methods based on foot wearable devices
3 基于非可穿戴設備的步態分析
與基于可穿戴設備的方法相比,基于非可穿戴設備的方法不需要穿戴額外的設備,避免了因穿戴設備而造成的運動限制,同時,基于視頻的步態分析方法能夠遠程監測PD 患者運動狀況,在PD 患者遠程診斷評估中有著重大意義[42]。大多數基于視頻的步態識別方法都是基于人體輪廓和基于人體關鍵點的步態分析方法,基本流程如圖6 所示。
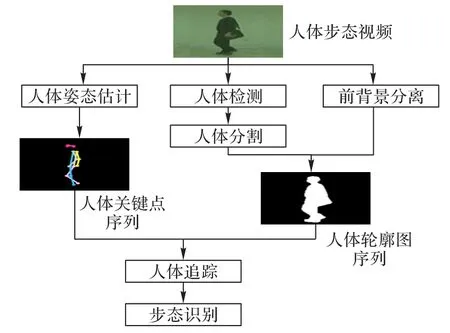
圖6 基于視頻的步態分析流程Fig.6 Video-based gait analysis flowchart
3.1 非可穿戴步態數據集
基于視頻的步態分析方法使用的數據集涵蓋了不同視角、環境條件和受試者的外觀條件等參數,數據類型大致可分為RGB(Red Green Blue)圖像、人體輪廓和人體骨骼節點等,常用的基于視頻的步態數據集如表5。

表5 基于非可穿戴設備的步態數據集Tab.5 Gait datasets based on non-wearable devices
3.2 基于人體輪廓的步態分析方法
基于人體輪廓的步態分析方法主要采用前景、背景差分方法或光流處理方法[48],即去除圖像背景,提取并分析人物輪廓再進行步態識別。
為了從視頻序列中準確檢測步態事件,文獻[49-50]中提出了基于視頻的步態事件檢測方法。文獻[49]中提出了一種基于單個二維視覺相機系統的步態事件檢測方法,從視頻幀中提取多個連續行人輪廓進行組合,不同數量的連續行人輪廓產生不同類型的連續輪廓差分圖(Consecutive Silhouettes Difference maps,CSD-maps),以描述步態模式,再使用CNN 從CSD-maps 中學習特征并檢測出步態事件;文獻[50]中提出了一種純視頻的方法自動檢測拖曳步態,將只包含腿和腳的RGB 輪廓輸入特征提取模塊,提取幀序列的多層次時空特征,該時空特征由特征融合模塊聚合,能夠有效識別異常步態和步態的嚴重等級。上述的步態分析方法易受視角、衣著服飾和遮擋物等因素的影響,為了解決這個問題,文獻[51-53]中提出了不同的步態分析方法。文獻[51]中提出了一種基于生成對抗網絡(Generative Adversarial Network,GAN)的GaitGAN 方法,應用PixelDTGAN(Pixel-level Domain Transfer GAN)模型[54]將視覺輸入轉換為不同的形式,通過生成的像素級圖像進行可視化。不同于傳統GAN,GaitGAN 包含兩種鑒別器:一種用于生成逼真的步態圖像;另一種用于確保生成的步態圖像包含人類識別信息。該方法可以將從任何角度獲得的步態圖像轉換為側視圖,避免了事先估計受試者的視角、服裝和攜帶物等條件帶來的影響。文獻[52]中提出了一種基于視頻傳感器的DeepGait 步態表示方法,對原始輪廓圖像進行歸一化處理,然后將識別出的每個步態周期輪廓圖像輸入預先訓練的VGG(Visual Geometry Group)-D 網絡,提取步態特征,生成一種通用的步態表示方法,降低了因視角、服裝或者背包帶來的影響。文獻[53]中提出了一種三維卷積神經網絡(3D CNN,3D-CNN)多視角步態識別網絡,該網絡是一個二級網絡,第一級網絡從視頻中采樣16 個幀作為輸入,識別任何步態視頻的視角;第二級網絡針對11 個不同的視角中每個受試者對應的角度進行訓練,實現了從不同的視角識別步態事件。表6 給出了基于人體輪廓的具體步態分析方法以及實驗結果。其中,準確率的計算方法同表2,精確率(Precision)的計算公式如下:
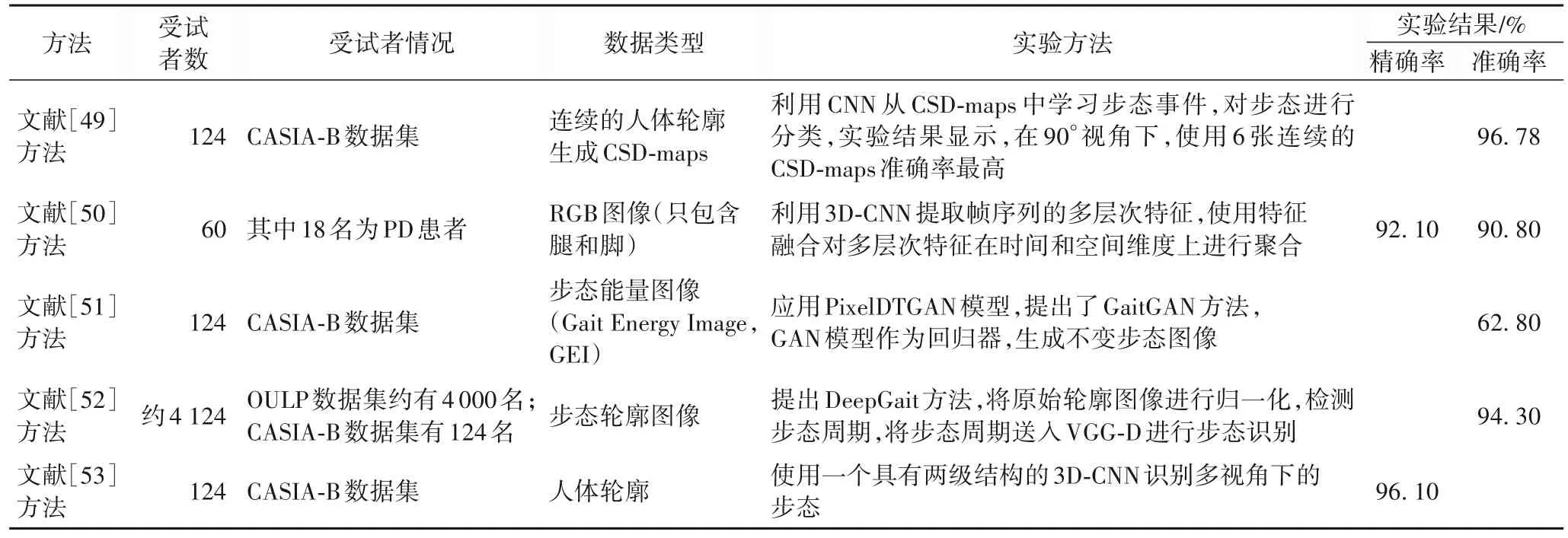
表6 基于人體輪廓的步態分析方法Tab.6 Gait analysis methods based on human silhouette
3.3 基于人體關鍵點的分析方法
基于人體關鍵點的步態分析方法,主要是從視頻中提取人體關鍵點坐標數據,再從中分析患者的運動特征[48]。該方法可以很好地解決因衣著外觀或者遮擋物等原因造成的識別率較低的問題。
文獻[42,55]中提出了一種用于評估人體運動障礙的時空圖卷積網絡(Spatial-Temporal Graph Convolution Network,ST-GCN),從視頻中提取受試者的人體骨骼序列,在臨床實踐中實現評估PD 患者的步態運動障礙。文獻[42]中在ST-GCN 結構的基礎上提出了雙流時空注意圖卷積網絡(Two-stream Spatial-Temporal Attention Graph Convolutional Network,2s-ST-AGCN)構建人體關節和骨骼序列的拓撲結構,自動捕獲關節和骨骼中的靜態空間信息和動態時間變化,并引入深度監督下的多尺度時空注意感知機制,提高模型學習特征的鑒別能力和魯棒性,有效識別PD 患者的異常步態;文獻[55]中則將ST-GCN 模型建立在骨架圖之上,構建了一個以關節為圖節點、以人體結構中符合關節自然連接性的空間邊和在連續的時間中連接相同關節的時間邊為圖邊的時空圖,對輸入數據應用多層ST-GCN 運算,生成更高級別的特征圖,提高了受試者動作識別的性能。文獻[56-57]中提出了基于圖卷積網絡(Graph Convolution Network,GCN)的步態凍結檢測方法,可以有效地用于FoG 事件檢測的細粒度人體動作識別等問題。文獻[56]中構造了一種新的基于GCN 的網絡結構,將每個視頻表示為一個有向圖,圖中的頂點表示解剖關節,加權邊表示這些關節之間的相互作用,采用弱監督學習策略處理在頂點層次上的預測,并提出數據驅動方法獲得可學習的加權鄰接矩陣,消除了昂貴的數據標注并且降低了模型的復雜度;文獻[57]中根據人體姿勢評估的最新進展,結合骨架姿勢和GCN 提出了GaitGraph 方法,使用HRNet(High-Resolution Network)[58]作為人體姿勢估計器,然后將提取的姿勢序列送入ResGCN(Residual GCN)[59]生成特征嵌入,提取步態信息,有效地解決了輪廓圖像丟失細粒度空間信息的問題。為了能夠有效提取數據中的關鍵信息,降低無效冗余信息,文獻[60]中提出了一個端到端的STA-LSTM(Spatial-Temporal Attention LSTM)網絡,并嵌入時空注意力機制,通過空間注意力模塊自動選擇每個幀中的關鍵關節點,通過時間注意力模塊為不同幀分配不同的重要程度,并引入正則化交叉熵,確保網絡的有效訓練。表7 給出基于人體關節的具體步態分析方法和實驗結果,實驗結果計算方法同表2,文獻[42]中的受試者是基于MDS-UPDRS(Movement Disorder Society-Unified Parkinson’s Disease Rating Scale)。
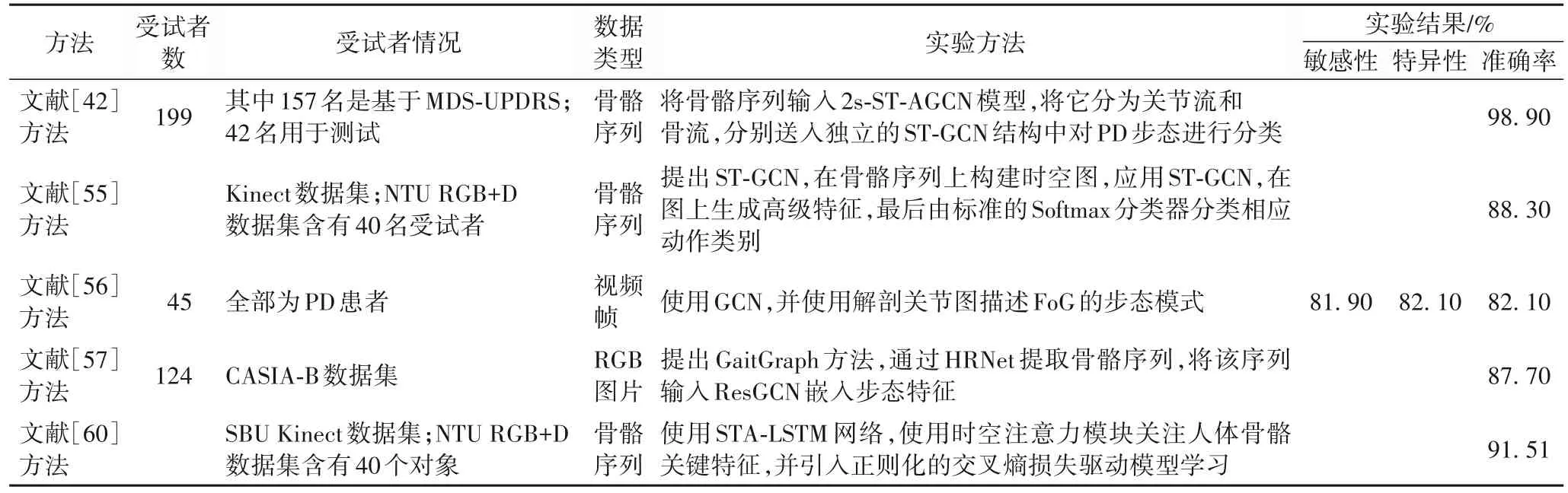
表7 基于人體關節的步態分析方法Tab.7 Gait analysis methods based on human joints
4 存在問題與未來展望
準確識別異常步態對PD 患者的診斷具有極大的實際意義,近年來也引起了廣大科研人員的廣泛關注,針對現有工作中存在的不足,本文作了如下總結和展望。
1)可穿戴設備旨在監測患者室內和室外的步態參數,需要PD 患者長時間佩戴傳感器,這就要求可穿戴設備功耗低、續航時間長。此外,長時間的佩戴可能會引起患者的不適。因此,為了能夠實現長時間監測PD 患者步態狀況,低成本、低功耗、測量數據精度高和穿戴舒適的可穿戴設備仍是研究人員未來的重點研究方向。
2)基于視覺的步態分析方法易受光照環境、視角、衣著服飾、背景和遮擋物等協變量因素的影響,復雜真實環境也會對結果造成影響,導致識別率較低,不能滿足實際應用的需要。而人體骨骼關鍵點的檢測技術通過抽象人體的姿態信息,很好地避免了因為服飾、攜帶物和遮擋物帶來的影響。
3)步態數據庫的樣本量較少,存在數據樣本不均衡的情況,且數據都是在患者已知的情況下采集的,可能會引起患者不自覺的姿態變化,影響最終數據的準確性。為了解決數據樣本較少的問題,研究人員致力于尋找新的方法,例如,通過深度學習方法中的GAN,可以生成大量不同的步態數據樣本。因此,獲取行人在自然狀態下的步態信息也是未來數據采集一個重要發展方向。
5 結語
隨著新技術的發展,有望實現基于步態的全自動化、客觀PD 評估方法,以改進現有疾病評分方法。本文主要從量表、可穿戴設備和非可穿戴設備這3 個方面分析總結了步態在PD 診斷上的應用,其中:可穿戴設備的成本和功耗都較低,適合長時間動態監測PD 患者的步態狀況,但是該方法需要患者在四肢穿戴相應的傳感器設備,在一定程度上影響患者的日常活動;非可穿戴設備可以全面地獲得患者的步態信息,無需患者穿戴任何設備,方便患者日常行動,但是在采集數據時,易受光照等外部環境的干擾,不能長時間對患者進行跟蹤識別。盡管人們對步態分析進行了長期的探索,但目前大多數步態分析方法還存在一些不足。未來的研究方向將專注于改進步態采集方式,提高步態分析方法的準確度和模型的泛化性,為PD 輔助診斷提供智能化決策系統。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
兒童故事畫報(2019年5期)2019-05-26 14:26:14
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
設備管理與維修(2015年12期)2015-04-09 06:57:00