基于邊緣計算的動態稱重系統實施與應用
2023-07-09 14:59:20林海葉思紅
電子制作 2023年10期
林海,葉思紅
(湛江幼兒師范專科學校,廣東湛江,524300)
隨著我國的經濟繁榮發展,公路建設也取得了不錯的成績,但是問題也隨之而來,有不少人因為車輛超限超載引發的交通事故而喪命,近年來,國內一些研究學者設計了多種不停車動態稱重系統及實施方案,大大地減少了治超檢測的難度,提高了效率。本研究基于鄉村振興戰略工程,使用AI 邊緣計算技術,設計了基于邊緣計算的動態稱重系統,該系統使用Jetson Nano 人工智能嵌入式設備,采用人工智能算法,識別率高,速度快。具有一個云端多個終端、5G 網絡連接、造價成本低,容易在縣、鄉等地區布控等特點。
1 相關工作
1.1 動態稱重檢測技術
目前,國內車輛超載檢測技術聚焦在非現場執法的動態稱重檢測技術,多車橋梁動態稱重算法[5],以Moses 軸重識別算法為基礎,基于橫橋向動力響應線和橋梁彎矩影響面,對單車以及多車過橋的橫向位置及軸重等車輛信息進行識別;基于神經網絡的車輛動態稱重系統[6],采用神經網絡自適應濾波變步長LMS 算法,能根據不同環境下針對不同車型進行檢測,達到了較好的技術適應度;多車軸重識別的橋梁動態稱重(BWIM)算法[7],搭建了包含9 層卷積層、2 層全連接層的卷積神經網絡(CNN)模型,在單車和多車工況下的軸重識別誤差均值基本低于5%,軸重識別效果良好且穩定;汽車動態稱重系統的算法研究[8]對傳感器在車輛非停車狀態下的短歷程信號進行分析,利用巴特沃斯低通濾波器濾除噪聲信號中的高頻分量優化算法進行最小二乘法擬合,能夠提高動態稱重系統的測量精度。雖然各種非現場執法的車輛動態稱重檢測技術已經不斷地在提升,但是還存在數據實時性不高,響應速度慢的情況;檢測稱重系統相對復雜,車輛較多時容易出現誤判,系統造價成本比較高,無法在經濟比較落后地區的鄉道、縣道上布控。
1.2 AI 邊緣計算平臺
Jetson Nano 是英偉達發布的一款小型人工智能(AI)計算主板,GPU 為128 核 Maxwell,顯存采用 64 位LPDDR4 25.6 GB/s 共4 GB,在嵌入式領域屬于相對高端的產品,CPU 為4 核 ARM? A57 @ 1.43 GHz,有豐富的AI 和計算機視覺(Computer Vision)應用程序編程接口(API),視頻編碼能力為4K @ 30 | 4×1080p @ 30 | 9×720p @ 30(H.264/H.265),視頻解碼能力為4K @ 60 | 2×4K @ 30 |8×1080p @ 30 | 18×720p @ 30|(H.264/H.265)可以直接用于注重低功耗的AI 應用場景。
1.3 車牌識別PO-MTCNN+LPRNet
本研究車牌檢測模塊采用了Pytorch 深度學習框架,車牌區域檢測使用我們提出的PO-MTCNN 改進型輕量級網絡模型,MTCNN[9]是一種非常著名的實時檢測模型,主要用于人臉識別。經過修改用于車牌檢測。基于輕量化考慮去掉了網絡結構中的Rnet 網絡,經實驗發現,在檢測車牌這類簡單圖像區域的情況下跳過Rnet 不會損害準確性。在本次研究中只使用了候選網絡(Pnet)和輸出網絡(Onet),通過大量的車牌區域目標檢測數據集的訓練和參數修改,最終確定PO-MTCNN 網絡模型結構,如圖1 所示。
Pnet 網絡模塊主要獲得車牌區域的候選窗口和邊界框的回歸向量,并用該邊界框做回歸,對候選窗口進行校準,然后通過非極大值抑制(NMS)來合并高度重疊的候選框。Onet 網絡模塊與Pnet 類似,通過邊界框的回歸和NMS 來去掉假正例的區域。只是由于該網絡結構和P-Net 網絡結構有差異,多了一層卷積層和一個全連接層,所以會取得更好地抑制假正例的作用,處理的結果會更精細。Onet接受24(高度)x94(寬度)的BGR 圖像,這與LPRNet 的輸入一致。
車牌字符的識別采用LPRNet[10],它是另一種實時端到端DNN,該網絡具有卓越的性能和低計算成本,無需初步字符分割。本研究還加入了空間變壓器層,使其能更好地識別圖像特征。
經過實驗證明PO-MTCNN+LPRNet 具有足夠好的魯棒性,不會受各種相機參數,視角,光照等的影響,經過系統優化,加強了車牌糾錯算法,并去掉了終端實時顯示路況模塊,減少了計算成本,與現有的車牌識別模塊對比,提高了在復雜條件下的車牌識別率,置信度達到98%以上,車牌識別速度快,準確率高,適合在各種嵌入式平臺上運行。
1.4 圖像分類網絡Mobilenet
MobileNetV3[11]是輕量型的圖像分類網絡,專注于移動或嵌入式設備的輕量級CNN,與傳統的卷積神經網絡相比,在精度降低較小的前提下,可以大大減少模型參數和計算量。通過硬件感知的架構搜索(NAS)的組合和NetAdapt 算法進行調整,以適應嵌入式CPU,然后通過新的體系結構改進進行改進,提高整體識別率。
2 整車動態稱重系統設計
本系統能有效治理超載現象和對車流控進行管理。采用非現場執法動態稱重檢測設計,相對于目前的靜態稱重檢測,不需要車輛停車,也不會引起交通阻塞。工控機系統使用邊緣計算設備Jetson Nano 作為嵌入式AI 邊緣計算平臺,與目前使用的X86 架構的集顯工控機相比算力更強大。邊緣計算設備減少了數據在網絡中傳輸的時間,簡化網絡結構,數據的分析和決策都交由邊緣節點進行處理。車型分類模塊采用輕量型Mobilenet V3 算法,與目前的車輛外廓尺寸檢測模塊相比較具有結構簡單、檢測距離遠、速度快、計算成本低等特點。車牌檢測模塊采用POMTCNN+LPRNet 算法,系統使用一個云端即可連接多個終端系統。
2.1 系統結構
系統終端主要由稱重模塊、隔離裝置、邊緣計算攝像頭三部分組成,結構簡單,穩定性高,如圖2 所示。稱重模塊采用先進的壓電石英傳感器,隔離裝置包含12V 的獨立供電模塊和數字重量變送器,數字重量變送器是通過數模轉換,把壓力的模擬信號轉換成數字信號。具體指標為綜合精度1/100000,輸入范圍0.4~6mV/V,激勵電壓 5VDC,通訊接口RS485。
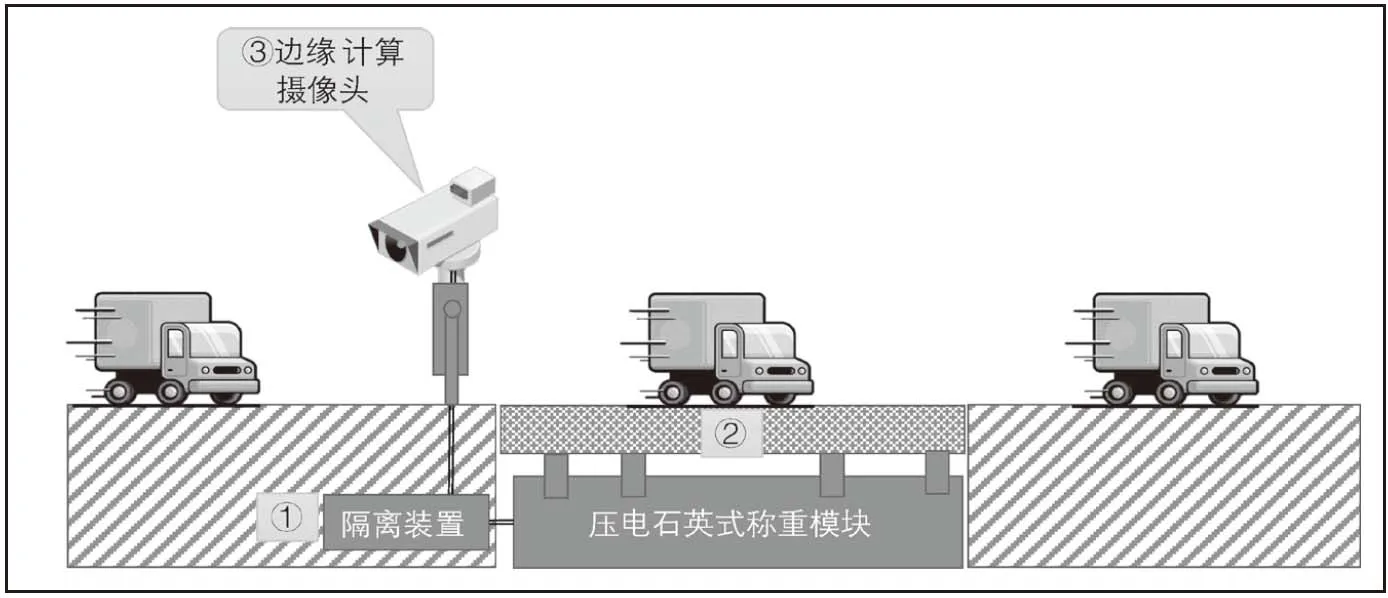
圖2 系統終端結構
邊緣計算攝像頭是整體系統的核心組成部分,主要由Jetson Nano 嵌入式AI 邊緣計算平臺、CSI 攝像頭(IMX219)、RS485 轉USB 模塊等組成。Jetson Nano 采用Ubuntu18 操作系統,Pytorch 深度學習框架,Python 編程。CSI 攝像頭(IMX219)參數指標為分辨率800W(3280X2464),CMOS 尺寸1/4 英寸,光圈2.0,焦距2.96mm,對焦視場角77°,畸變<1%。
系統云端使用WINSERVER 服務器、動態網頁技術、數據庫管理技術實現智慧公路大屏管理系統。WINSERVER服務器參數指標為CPU 主頻 2.4G 10 核心20 線程,內存ECC DDR4 2933,固態硬盤2T。
2.2 終端技術路線
首次啟動時JetsonNano 檢測稱重模塊和拍照模塊是否正常。如果正常則攝像頭開始實時監控車輛。POMTCNN+LPRNet 算法是正確率在95%以上的深度學習算法,為了保證車牌信息識別的置信度,我們采用連續拍照采集和識別的方法來進一步提高正確率。當車輛經過時,系統通過PO-MTCNN+LPRNet 算法獲取第一個車牌信息為χ1,然后每間隔0.1 秒,通過攝像頭采集一張車輛照片,連續采集10 張,再通過PO-MTCNN+LPRNet 算法獲取到的車牌信息分別為χ2,χ3,χ4……χ11,再把11個車牌信息χ1,χ2,χ3,χ4……χ11,加入到列表θ,通過列表求得相同元素最多的車牌信息為χn,作為最終的車牌號碼信息。最后保存車輛實時照片及車牌信息。整體識別時間平均為1.3 秒,車牌置信度平均為98%。
接下來,車輛經過稱重模塊,系統通過USB 口讀取壓力傳感器稱出的車輛重量信息,當車前輪剛接觸稱重模塊時,設置時間變量β1,當前獲取的重量值為μ,最高重量值為φ,隨著車輛不斷地前進,β值在增加,μ值也不斷地在增加時,車重公式為:
當稱重模塊檢測到μ<φ時,φ值不更新,直到μ=0 時,取得時間變量β2,設置稱量模塊的總長為γ,車速ψ為:
由于采用整車式稱重方式,稱重模塊結構簡單,出錯率低,而且可以同時測出車輛的行駛速度。
最后,使用輕量型圖像分類網絡Mobilenet V3 對保存的車輛實時照片進行車型判斷。接著系統將車輛照片、車牌號、車重、車型等車輛信息通過MQTT 協議發送到云端,當云端FTP 連接正常時,通過FTP 協議將車輛信息文件發送到云端服務器。上傳成功后,攝像頭繼續實時監控車輛。系統流程圖如圖3 所示。
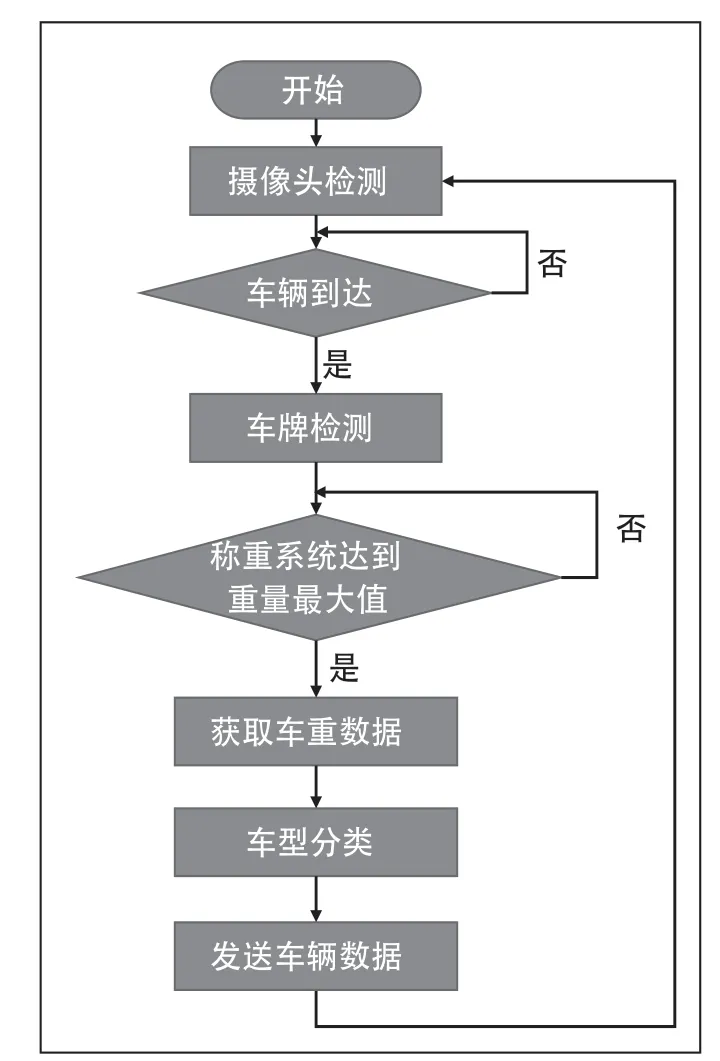
圖3 終端技術路線
2.3 云端技術路線
云端服務器每隔15 秒檢測是否有監控點車輛信息的數據文件上傳,如果有,就會將數據文件里的車輛圖片、車重、車型、車牌號碼等數據解密拆分,分別存入云端數據庫記錄中。經過IIS 信息服務,就可以在動態網頁端和移動端APP實時顯示當前通過車輛,超載車輛的現場圖片,并能對指定時間內的車輛數據進行匯總,顯示超載車輛,車流量、車型等數據。系統運行流程圖如圖4 所示。
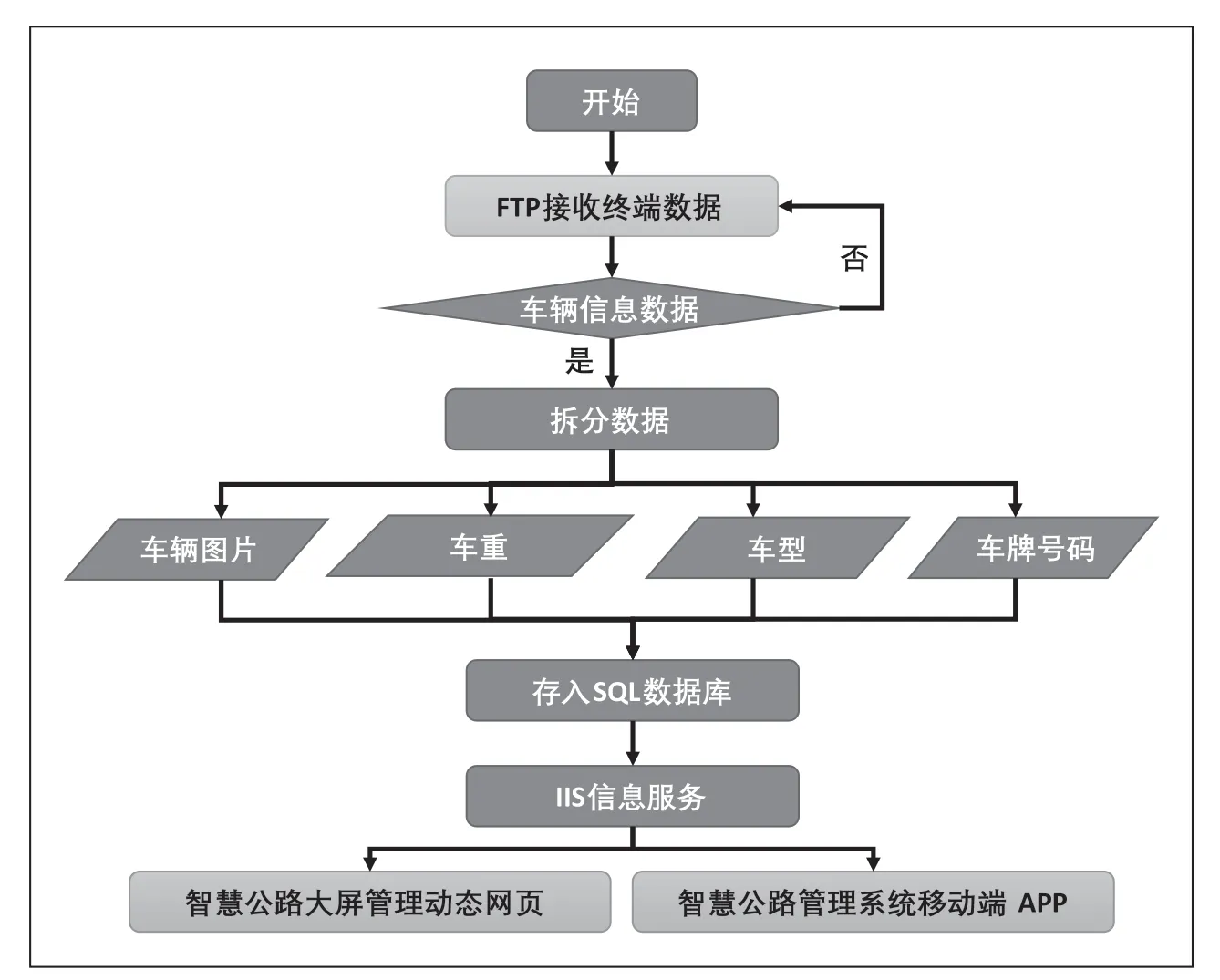
圖4 云端技術路線
3 實驗內容
實驗平臺采用Jetson Nano 4G,CSI 攝像頭,使用輪輻式壓力傳感器做稱重模塊,記錄不同的車輛和車速經過檢測點的數據,實驗數據如表1 所示。
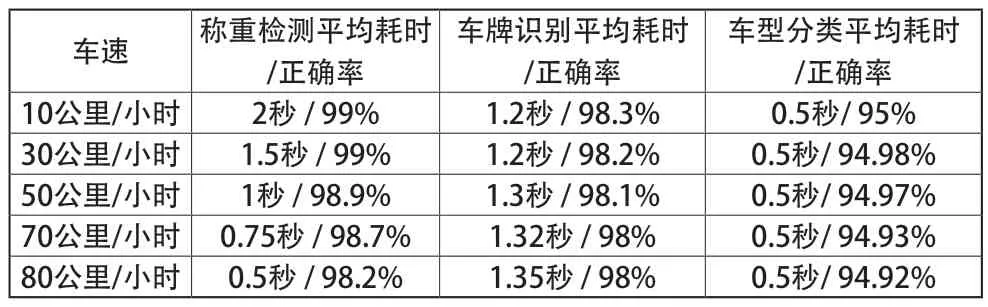
表1
從表1 的數據可知,整個系統的正確率很高,稱重檢測模塊在車輛低速經過時,正確率最高,耗時最長,這主要是由于系統采用整車稱重設計,車輛要完全在稱重模塊內才能達到最大重量,稱重檢測模塊的平均正確率在98.76%。車牌檢測模塊隨著車速不斷地增加,攝像頭捉拍到高清圖像的難度增加,為了保證檢測的正確率在98%以上,需要經過多輪的檢測,因此耗時也隨著車速的增加而加長,平均檢測耗時為1.27 秒。車型檢測是在車牌檢測之后,由于車速的增加,所獲取的圖像質量略有下降,平均正確率為94.96%,車型分類只對采集后的圖像進行識別,因此耗時保持不變為0.5 秒。
4 結論
通過上述的實驗數據表明,基于邊緣計算的整車動態稱重系統在車輛的稱重檢測、車牌識別、車型分類方面與現有的技術對比,具有系統響應速度快,正確率高的特點,能完全滿足檢測要求。而且結構簡單、易于維護、造價成本低、采用5G 無線網絡連接、一云端多終端,適合在縣鄉公路布控。實現了車輛在不停車的狀況下的超限超載檢測,大大提高了公路運輸載重檢測效率,可從根源上降低了車輛超限超載對路面造成的損傷和人員傷亡的情況,提升公路運輸效率,保護人民生命財產安全。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34