基于PID算法的低功耗微型磁懸浮控制系統設計
2023-07-13 22:07:59陳家棟李向春馬海琴王原劉顏明
機電信息 2023年13期
陳家棟 李向春 馬海琴 王原 劉顏明
摘 要:針對當前市面上微型磁懸浮裝置調節不夠快速靈敏,導致調節功耗大的問題,提出一種基于PID算法的低功耗微型磁懸浮控制系統。首先,詳細介紹了微型磁懸浮控制系統的方案設計,包括磁懸浮系統結構、磁懸浮控制方案以及懸浮體失衡控制原理;然后,從關鍵電路設計和程序設計方面介紹了基于PID算法的磁懸浮控制系統實現;最后,對所設計的磁懸浮控制系統進行了測試,并與市面上購買的磁懸浮裝置進行了功耗測試對比。測試結果表明,所設計控制系統實現了磁懸浮的低功耗調節。
關鍵詞:磁懸浮;PID算法;低功耗;自動控制
中圖分類號:TP273? ? 文獻標志碼:A? ? 文章編號:1671-0797(2023)13-0035-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.13.009
0? ? 引言
近年來,隨著社會經濟和科學技術的迅速發展,磁懸浮已經逐漸走進了人們的生活,如出現了磁懸浮列車、磁懸浮地球儀、磁懸浮音箱、磁懸浮展示臺等[1-2],磁懸浮技術給人們帶來了新的生活體驗,提高了人們的生活水平。常見的磁懸浮展示裝置有上拉式磁懸浮裝置和下推式磁懸浮裝置。上拉式磁懸浮裝置電磁線圈在被懸浮體上面,依靠磁場間異性相吸的特性產生吸引力平衡重力使懸浮體懸浮[2]。優點是系統的性能參數可以在線調節,但視覺效果不明顯[3]。下推式磁懸浮裝置通過永磁體間的斥力來支撐懸浮體,相對于上拉式磁懸浮裝置,具有更強的抗干擾能力,更具有視覺效果,可更好地展示磁懸浮技術的吸引力。
鑒于當前市面上的磁懸浮裝置多數都是采用硬件電路調控懸浮體,調節不夠精準、不夠靈敏,導致調節功耗大等問題,本文設計了一個基于PID算法的低功耗微型磁懸浮控制系統,以實現懸浮裝置快速穩定調節,降低系統的調節功耗。
1? ? 微型磁懸浮控制系統方案設計
1.1? ? 微型磁懸浮系統結構
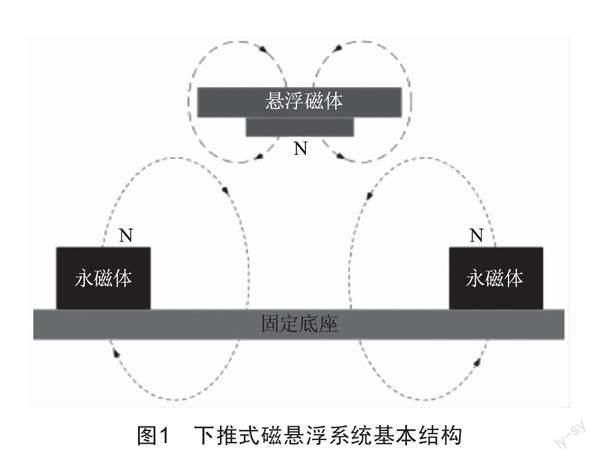
本文采用下推式磁懸浮系統,系統結構如圖1所示,由底座永磁體和懸浮磁體組成。
在垂直方向上,懸浮磁體與底座磁體之間存在排斥力,該排斥力克服了懸浮磁體的重力作用,使懸浮體懸浮于空中某一垂直高度。在水平方向某一位置上(理想情況下為中心位置),懸浮磁體受到底座磁體的左右斥力是平衡相等的,無須控制也可保持平衡穩定的懸浮狀態。但由于變化的外界環境因素影響,懸浮磁體容易因失去平衡狀態而掉落。因此,為維持懸浮磁體長期處于平衡懸浮狀態,必須引入自動控制系統。加入自動控制系統的磁懸浮系統結構如圖2所示,由底座永磁體、懸浮磁體、電磁線圈、三軸霍爾傳感器及單片機檢測控制電路組成。自動控制系統通過霍爾傳感器檢測懸浮磁體的位置,再利用單片機控制電磁線圈將失去平衡狀態的懸浮磁體調整至平衡狀態。
1.2? ? 磁懸浮自動控制方案設計
1.2.1? ? 磁懸浮自動控制系統框圖
磁懸浮自動控制系統如圖3所示。
1)霍爾傳感器:把懸浮體處于不同位置的磁場信號轉換為電壓信號。
2)信號放大電路:放大霍爾傳感器輸出的電壓信號,并將其輸出到STM32單片機進行A/D轉換。
3)STM32單片機:采集放大電路輸出的電壓信號,通過PID位置式算法計算出懸浮體的位置信息,并產生PWM驅動信號,通過電磁線圈改變空間磁場,從而調整懸浮體的位置。
4)H橋驅動電路:將單片機輸出的PWM控制信號進行功率放大,驅動電磁線圈。
5)電磁線圈:通過周期變化的電流信號產生電磁場,進而控制調節懸浮體的位置。
1.2.2? ? 磁懸浮系統失衡控制原理
為檢測懸浮體的位置,在懸浮體下方的中心點位置安裝一個垂直于水平面的線性霍爾傳感器。線性霍爾傳感器的輸出電壓與磁感應強度的特性曲線如圖4所示。由圖4可知,霍爾傳感器可輸出與磁感應強度成正比的電壓信號,根據該電壓的大小可判定出懸浮體的位置。
磁懸浮系統失衡控制原理如圖5所示。為控制懸浮磁體的位置,在水平面X、Y軸方向上分別放置兩個電磁線圈。同一坐標軸上的兩個電磁線圈為串聯關系,但其電磁線圈的導線繞向相反。
以X軸方向為例,如當懸浮磁體受到干擾打破平衡偏離中心點向左時,霍爾傳感器檢測到穿過自身的磁感線密度變化,輸出相應的變化電壓給單片機。單片機根據線性霍爾傳感器輸出的反饋信號,給電磁線圈輸入相應方向的電流,左線圈對懸浮磁體產生斥力F1,右線圈因為繞向相反而產生吸引力F2,F1與F2合成向右的作用力F,從而將懸浮體拉回至平衡點。Y軸方向控制原理與X軸相同。
2? ? 基于PID算法的磁懸浮控制系統實現
2.1? ? 關鍵電路設計
2.1.1? ? 霍爾傳感電路設計
本設計選用超高靈敏度霍爾傳感器,型號為HW101A-G,電路如圖6所示。X為X軸方向霍爾傳感器的輸出,Y軸和Z軸方向的傳感電路與此相同。
2.1.2? ? 放大電路設計
鑒于選用的霍爾傳感器內部無放大電路,為了提高檢測速度和靈敏度,需加入電壓放大電路,放大霍爾輸出電壓的變化量。放大電路如圖7所示。
放大電路輸出VADC與霍爾傳感器輸出電壓Vx的關系如式(1)所示:
系統采用單電源供電,RP3為基準電壓VREF調節器,調節使得VREF≈=0.6 V,作用是調節放大器輸出的電壓偏移量,將信號電壓調節至適合STM32單片機內部ADC采集的范圍。同時放大電路將霍爾輸出變化電壓放大約20倍,以提高檢測靈敏度。
2.1.3? ? H橋驅動電路設計
本設計選取TI公司的DRV8870獨立H橋驅動芯片,該芯片由4個N溝道半導體場效應晶體管組成H橋,能夠雙向控制負載,峰值電流最高可達3.6 A。驅動電路如圖8所示。
線圈最大電流Imax可由式(2)估算,通過PR1調節4引腳電壓VREF。利用R23和R24并聯分流,減少單個電阻的發熱量,從而提高系統穩定性。
2.2? ? 關鍵程序設計
2.2.1? ? 懸浮體檢測控制程序設計
懸浮體檢測控制程序如圖9所示,檢測控制程序設在定時器中斷服務程序里進行。
數據采集:利用STM32片內的12位ADC對信號進行采集,為了減輕處理器負擔以提高處理效率,開啟DMA傳輸。DMA傳輸可將數據搬運至指定地址的內存,并不需要占用CPU。
數據處理:對采集的數據進行排列,去除最大、最小值,取剩余數據的均值。
懸浮體檢測控制:首先通過采集Z軸的霍爾電壓來檢測是否存在懸浮體;然后調用PID函數計算,檢測出懸浮體的水平方向位置,并控制輸出PWM信號改變X、Y軸的電磁線圈電流,從而調整懸浮體至平衡位置。
2.2.2? ? 位置式PID算法程序設計
PID控制算法是由比例、積分和微分三項結合的控制算法。比例調節作用:控制系統一旦出現偏差,比例項會立即參與調節,減小偏差[4]。比例調節的作用越大,調節速度越快,但是過大的比例調節,超出原有誤差,會導致系統出現不穩定。積分調節作用:消除穩態誤差,使其絕對差值接近于0。微分調節作用:微分項可以反映偏差信號的變化率。由于其計算方式特殊,對誤差有預見性,能對偏差變化的趨勢做出判斷,即能產生提前的控制作用。添加微分項參與調節,能改善系統的動態性能。
本文采用位置式PID算法,程序流程如圖10所示。首先,計算ADC采集的電壓與系統設定的中心位置數值之差,得出比例項。其次,每次計算均對誤差進行累加,累加數值即為積分項,需將積分項限制在適宜的范圍內。然后,微分項為當前誤差值與上一次誤差的差值。最后,將PID的各項數值分別與相應的系數相乘之后求和得PID輸出,限制輸出誤差于適宜范圍,并更新存儲誤差。
3? ? 實驗結果及分析
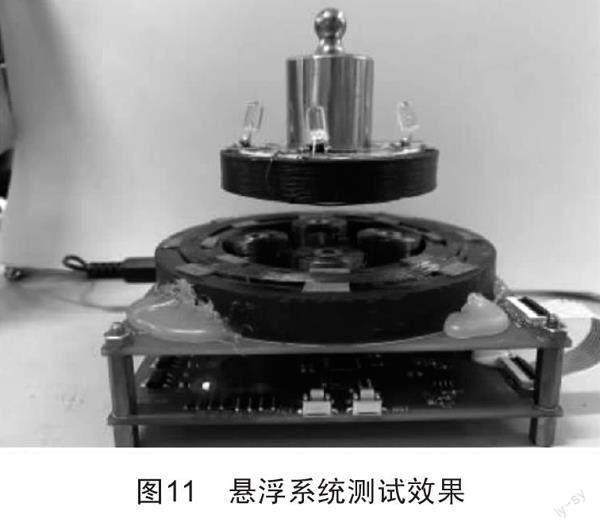
經測試,磁懸浮系統實現了穩定平衡的效果。圖11為懸浮系統測試效果圖。
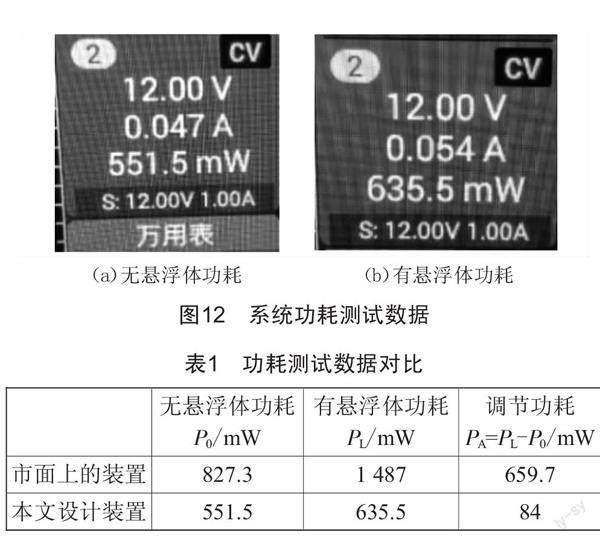
為了驗證所設計系統為低功耗系統,對系統進行了功耗測試,圖12為功耗測試數據。當無懸浮體時,系統功耗僅為551.5 mW;當有懸浮體時,系統功耗僅為635.5 mW。
為了進一步驗證效果,與市面上購買的裝置進行了同等條件下的測試數據對比,如表1所示。由測試數據可知,本文設計的磁懸浮控制系統具有明顯的功耗優勢。
4? ? 結束語
本文所設計的微型磁懸浮控制系統包含了單片機控制器、霍爾傳感器采集電路、H橋驅動電路等。基于PID控制算法和脈寬調制原理,通過霍爾傳感器檢測懸浮磁體的位置,再利用單片機控制電磁線圈將失去平衡狀態的懸浮磁體調整至平衡狀態。控制系統實現了快速穩定調節懸浮體,使其處于穩定平衡狀態,具有調節功耗低的優勢,對磁懸浮系統的進一步研究具有一定的參考意義。
[參考文獻]
[1] 朱佳濤,趙鴻霍,敖鑫,等.一個磁懸浮展示臺的設計[J].電腦知識與技術,2022,18(21):91-93.
[2] 胡帥,陳曉岑,張麗,等.下推式混合磁懸浮裝置的設計與仿真研究[J].數字制造科學,2019,17(1):45-48.
[3] 張維煜,朱熀秋,鞠金濤,等.磁懸浮軸承研究現狀及其發展[J].軸承,2016(12):56-63.
[4] 王長正.板球系統的PID控制器參數智能優化研究[D].昆明:昆明理工大學,2019.
收稿日期:2023-04-17
作者簡介:陳家棟(1986—),男,廣西合浦人,講師,研究方向:測試計量技術及儀器。
通信作者:劉顏明(1990—),男,遼寧沈陽人,專任教師,研究方向:工業先進過程控制。
