基于改進(jìn)松鼠算法的光伏多峰MPPT 控制方法研究*
2023-07-21 10:36:36白玉婷黃政雨
南方農(nóng)機(jī) 2023年15期
白玉婷 ,黃政雨
(1.黔南民族師范學(xué)院計算機(jī)與信息學(xué)院,貴州 黔南州 558000;2.杭州電子科技大學(xué)經(jīng)濟(jì)學(xué)院,浙江 杭州 310018)
0 引言
傳統(tǒng)化石燃料不可再生,且直接向環(huán)境排放溫室氣體,造成了嚴(yán)重的環(huán)境問題。太陽能光伏與其他可再生能源相比,因發(fā)電更可靠、使用更安全、價格更便宜而受到人們的關(guān)注[1-2]。而單塊太陽能光伏板功率有限,人們往往同時使用多塊太陽能光伏板組成太陽能光伏陣列對太陽能電池充電。由于各太陽能光伏板所受照度及環(huán)境遮擋情況不同,各太陽能光伏板內(nèi)阻和產(chǎn)生的功率也不同,導(dǎo)致太陽能光伏陣列產(chǎn)生多個峰值的電壓-電流特性[3-4]。
傳統(tǒng)的MPPT 技術(shù),如擾動和觀測(P&O)方法、爬山(H&C)算法等無法區(qū)分局部最優(yōu)和全局最優(yōu),難以解決失配現(xiàn)象下的最大功率點(diǎn)追蹤問題[5-6]。現(xiàn)有文獻(xiàn)提出了一系列啟發(fā)式算法,如粒子群算法(PSO)、蟻群算法(ACO)等追蹤失配現(xiàn)象下的最大功率點(diǎn)[7]。這些方法雖然可以追蹤到最大功率點(diǎn),但追蹤振蕩多、追蹤速度慢、動態(tài)性能差。部分學(xué)者提出了一系列混合啟發(fā)式算法,如杜鵑螢火蟲混合算法(CFF)、混合蛙跳算法(SFLA)、光伏熱電混合算法(PV-TEG)等,這些算法動態(tài)性能和穩(wěn)態(tài)性能優(yōu)于傳統(tǒng)啟發(fā)式算法,但算法結(jié)構(gòu)復(fù)雜,難以應(yīng)用于一般工業(yè)場景下的光伏控制系統(tǒng)。本研究提出了一種改進(jìn)松鼠算法(Improved Squirrel Search Algorithm)進(jìn)行最大功率點(diǎn)追蹤,并進(jìn)行了仿真實(shí)驗,驗證算法性能。
1 光伏系統(tǒng)數(shù)學(xué)模型
太陽能光伏系統(tǒng)可以通過電流源、二極管和電阻進(jìn)行建模[8-9],數(shù)學(xué)模型如式(1)所示。
式中,Iph為光伏電流,I0為電池反向飽和電流或二極管泄漏電流,Vc(t)為模塊輸出電壓,Ic(t)為模塊輸出電流,e 為自然對數(shù)。為了產(chǎn)生更大的功率,往往將多個太陽能光伏板通過串并聯(lián)組成太陽能光伏板陣列。在理想情況下,多塊太陽能光伏板內(nèi)阻相同,通過調(diào)整負(fù)載電阻Rs可使每一塊太陽能光伏板均實(shí)現(xiàn)最大功率發(fā)電。但太陽能光伏系統(tǒng)往往運(yùn)行在復(fù)雜的環(huán)境中,如不同的陰影遮擋、不同的電氣特性和部分電氣故障,這些不匹配現(xiàn)象會產(chǎn)生反向電流燒毀電池,使用旁路二極管解決這些問題,特征曲線也變?yōu)榱硕喾迩€。失配現(xiàn)象下的太陽能光伏陣列電壓-功率曲線如圖1 所示。
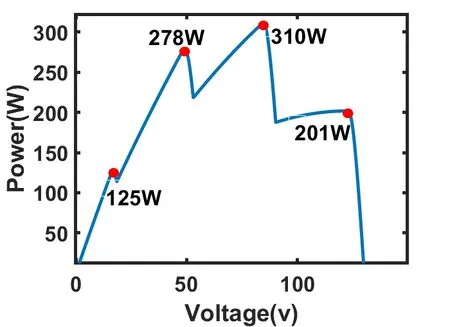
圖1 失配現(xiàn)象下的太陽能光伏陣列電壓-功率曲線
2 改進(jìn)松鼠算法
松鼠搜索算法靈感來源于飛行松鼠的生存習(xí)性[10]。假設(shè)森林中存在三種樹,山核桃樹、橡子樹和普通樹,山核桃樹、橡子樹均為松鼠食物來源。松鼠可在樹間滑翔覓食,在夏季,松鼠會向橡子樹、山核桃樹遷徙以獲得食物,并盡可能找到山核桃以儲備過冬。在冬季,由于被捕食風(fēng)險過高,松鼠遷徙減少。在覓食過程中,松鼠有被捕殺的可能。
松鼠搜索算法的初始解隨機(jī)選擇,設(shè)N代表松鼠的數(shù)量,則第i只松鼠可表示為Si=[Si1,Si2,Si3,...,SiD],其中N和D是算法的搜索維度,初始位置由式(2)隨機(jī)確定。
松鼠覓食過程有以下幾種可能:在沒有遇到捕食者的情況下,若松鼠當(dāng)前位置為普通樹,則可能向山核桃樹或橡子樹移動;若松鼠當(dāng)前位置為橡子樹,則向山核桃樹移動;若松鼠當(dāng)前位置為山核桃樹,則不移動;若松鼠遇到捕食者,則隨機(jī)移動,松鼠位置迭代如式(3)所示。
式中,Snt為當(dāng)前松鼠位置,Sat為目標(biāo)松鼠位置,dg為隨機(jī)滑翔距離,G為滑動常數(shù),Pr為遇到捕食者的概率,R為[0,1]的隨機(jī)數(shù),k為迭代次數(shù)。在冬季,松鼠將停止覓食。如果季節(jié)檢測條件成立,則無法獲得食物的松鼠將隨機(jī)遷移。為季節(jié)常數(shù),為常數(shù)最小值,可通過式(4)、(5)計算。
式中,km是最大迭代次數(shù)。當(dāng)季節(jié)檢測條件滿足后,普通樹和橡子樹上的松鼠開始積極覓食,此時隨機(jī)遷移公式如式(6)所示。
Levy表示列維飛行。針對松鼠搜索算法收斂速度慢的特點(diǎn),本研究改進(jìn)了松鼠覓食過程的位置迭代公式,使用Levy列維飛行公式迭代松鼠覓食過程,如式(7)所示。
這樣就使得松鼠在覓食過程中向當(dāng)前最優(yōu)值更快速移動,縮短了算法的收斂時間。
3 數(shù)值仿真
利用MATLAB 建立了太陽能光伏系統(tǒng)動力學(xué)模型,并利用Runge-Kutta 方法求數(shù)值解。PWM 頻率設(shè)置為100 kHz,采樣頻率為0.001 s。算法仿真結(jié)果如圖2 所示,傳統(tǒng)SSA 算法在0.1 s 仍未收斂,而本研究提出的ISSA 算法在0.049 3 s 處實(shí)現(xiàn)收斂,且傳統(tǒng)SSA 算法振蕩遠(yuǎn)多于本研究提出的ISSA 算法。因此,本研究提出的ISSA算法具有更好的動態(tài)性能。
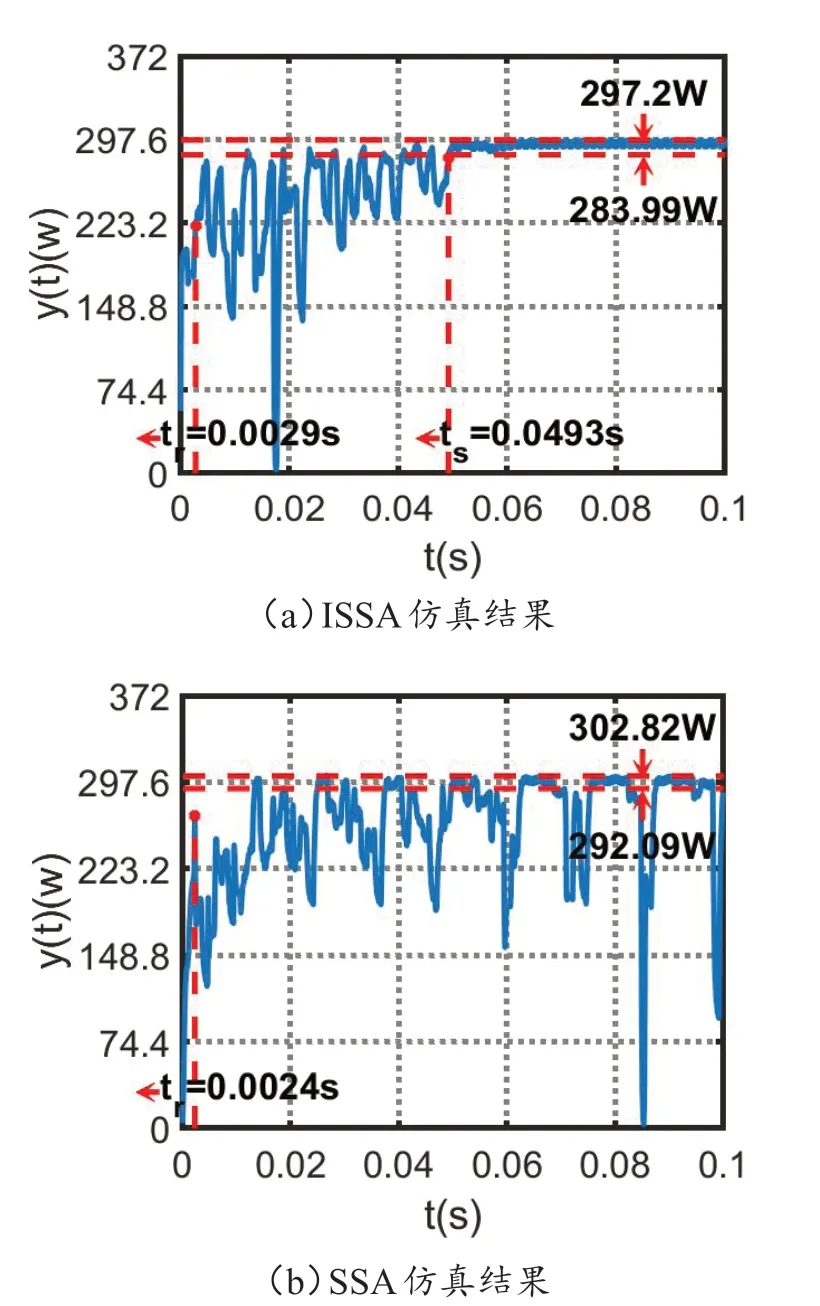
圖2 算法仿真結(jié)果
4 結(jié)語
綜上所述,本研究提出了一種基于改進(jìn)松鼠算法(ISSA)的光伏MPPT 控制算法,通過MATLAB 仿真,在失配現(xiàn)象下將提出的算法與原始SSA 算法進(jìn)行比較,證明ISSA 算法性能優(yōu)于SSA 算法,ISSA 算法具有更好的動態(tài)性能。