激光雷達技術在葉面積指數提取中的研究進展
2023-07-31 16:08:14丁銘銘包廣道劉婷禹東彬林燦姜雪菲翟暢
安徽農業科學 2023年13期
關鍵詞:方法
丁銘銘 包廣道 劉婷 禹東彬 林燦 姜雪菲 翟暢
摘要 葉面積指數(LAI)是觀測植被生態的重要參數之一,快速、精準獲取大尺度的LAI對發展精準林業至關重要。激光雷達技術(LiDAR)能夠準確探測植被空間和地形的三維結構,特別是對植被垂直信息分布的獲取,具有傳統光學遙感技術無法比擬的優勢,在森林參數的測量與反演上已經取得了成功的應用。介紹了激光雷達技術原理、傳統測量LAI的技術方法及LiDAR反演LAI的優勢,重點分析了LiDAR反演LAI的關鍵技術研究和LiDAR在反演LAI應用中的研究進展,并對LiDAR存在的問題和未來的發展趨勢進行了分析總結。
關鍵詞 葉面積指數;星載激光雷達;機載激光雷達;地基激光雷達;激光雷達處理技術
中圖分類號 S771.8? 文獻標識碼 A? 文章編號 0517-6611(2023)13-0001-07
doi:10.3969/j.issn.0517-6611.2023.13.001
Research Progress of Lidar Technology in Leaf Area Index Extraction
DING Ming-ming1,2,BAO Guang-dao2,LIU Ting2 et al
(1.Changchun University,Changchun,Jilin 130022;2.Jilin Academy of Forestry Science,Changchun,Jilin 130031)
Abstract Leaf area index (LAI) is one of the important parameters for observing vegetation ecology,how to quickly and accurately obtain large-scale LAI is crucial to the development of precision forestry. Light Detection And Ranging (LiDAR) can accurately detect the three-dimensional structure of vegetation space and terrain,especially the acquisition of vertical information distribution of vegetation, has incomparable advantages over traditional optical remote sensing technology,it has been successfully applied in the measurement and inversion of forest parameters.This paper introduces the principle of lidar technology, traditional measurement LAI techniques and advantages of LiDAR LAI inversion,the key techniques of LiDAR LAI inversion and research progress of LiDAR in LAI inversion were analyzed.Finally, the existing problems and future development trends of LiDAR are analyzed and summarized.
Key words Leaf area index;Terrestrial laser scanning;Airborne laser scanning;Spaceborne laser scanning;Lidar technology
基金項目 吉林省自然科學基金項目(YDZJ202201ZYTS446);吉林省發改委創新能力建設項目(2021C044-9);吉林省科技發展計劃項目(YDZJ202102CXJD046);吉林省自然科學基金項目(202201-01315JC);吉林省科技廳重點研發項目(20230202098NC);吉林省科技發展計劃項目(20200602006ZP)。
作者簡介 丁銘銘(1998—),男,吉林四平人,碩士研究生,研究方向:森林生態。
通信作者,講師,從事森林生態研究。
收稿日期 2022-12-30;修回日期 2023-02-21
葉面積指數(leaf area index,LAI)是定量表征植物冠層結構的重要參數,在衡量宏觀森林健康狀態、估算森林生態參量等方面具有關鍵作用[1]。研究表明,LAI對植被的光合、呼吸以及碳循環等生物物理過程存在決定影響[2],通過LAI的異質性差異及變化規律,能夠反映森林的生態條件,植物的生長趨勢、狀態,并以此評價森林光照、水分、土壤、植物之間能量的平衡狀況。因此,準確、快速、宏觀地獲取森林LAI空間分布格局及其周期性變化態勢,對準確還原森林碳水循環過程、探測擾動因子位置及程度、評估森林生態服務功能具有重大意義。
葉面積指數這一概念最早由英國作物學家Watson在20世紀40年代提出[3],當時被定義為“單位面積土地上單面植被光合作用的綜合”[4]。但由于只考慮了葉片平整的情況,對葉片特性描述欠缺合理性,難以體現葉片的結構作用,局限性較大[5]。在此之后的近80年里,很多學者提出了新的定義,大致可以分為4種:①地表單位面積上冠層葉片垂直投影到水平面上的面積總和[6]。但這一定義忽略了植被冠層葉傾角不同的問題。②地表單位面積上冠層葉片垂直投影到水面上的最大投影面積[7]。該定義會因消光系數而使結果受影響。③單位地面面積總截面積的一半[8]。該定義只適合非平面的葉子。④地表單位面積上總葉片表面積的一半[9]。該定義考慮了多個方面,可以用于各種樹種,包括針葉的不規則形狀,是目前接受度最高、應用最廣泛的定義。值得注意的是,以上不同的定義都有其本身意義,所以使用不同的定義去計算LAI會導致計算結果存在著較大差異[2],應用者需依據研究目的選擇合適的定義。
目前,針對葉面積指數的測定方法很多[10-11],但均受不同條件的限制。仍然沒有一項技術可以在無損的情況下實現對LAI的精準測量,而激光雷達作為一種新型的主動遙感技術,不僅能夠直接、快速、精準地獲取研究對象的三維結構坐標信息,還具備對植被的空間結構和地形的偵測功能,尤其是對森林高度和垂直結構的檢測能力,是傳統光學遙感無法比擬的[12]。因此,通過激光雷達獲取森林結構的精確三維點云信息,再對點云數據進行處理、分析,可以有效地估測森林的垂直結構信息以及植被的冠層信息等,既提高了葉面積指數估算的準確性,也避免了葉面積指數估測中存在的飽和效應。
該研究通過整理國內外激光雷達技術的發展及分類、LAI的測量方法、激光雷達數據的處理方法,梳理了激光雷達技術在葉面積指數反演研究中的發展脈絡,包括現有的點云的去噪、分類技術等,并在此基礎上,歸納了當前仍存在的技術問題,對未來激光雷達技術在LAI測量方面的應用提出了展望,旨在對未來開展高精度LAI測定研究以及區域高分辨率葉面積指數產品生產提供參考。
1 激光雷達技術
激光雷達技術(light detection and ranging,LiDAR)是一種新型主動探測與測距技術。相比于傳統雷達,它結合了激光技術和雷達技術,具有分辨率高、易攜帶、探測能力強等優點。而且不受地面回波的影響,具有微小物體探測能力[13]。自20世紀60年代問世以來,已經被諸多領域廣泛應用[5]。直到20世紀80年代,有研究人員嘗試將LiDAR用于獲取三維點云數據上,結果達到了傳統技術難以達到的高度,尤其是對目標細節的獲取更是傳統技術無法比擬的[10]。此后,LiDAR也成為諸多行業的熱門研究。
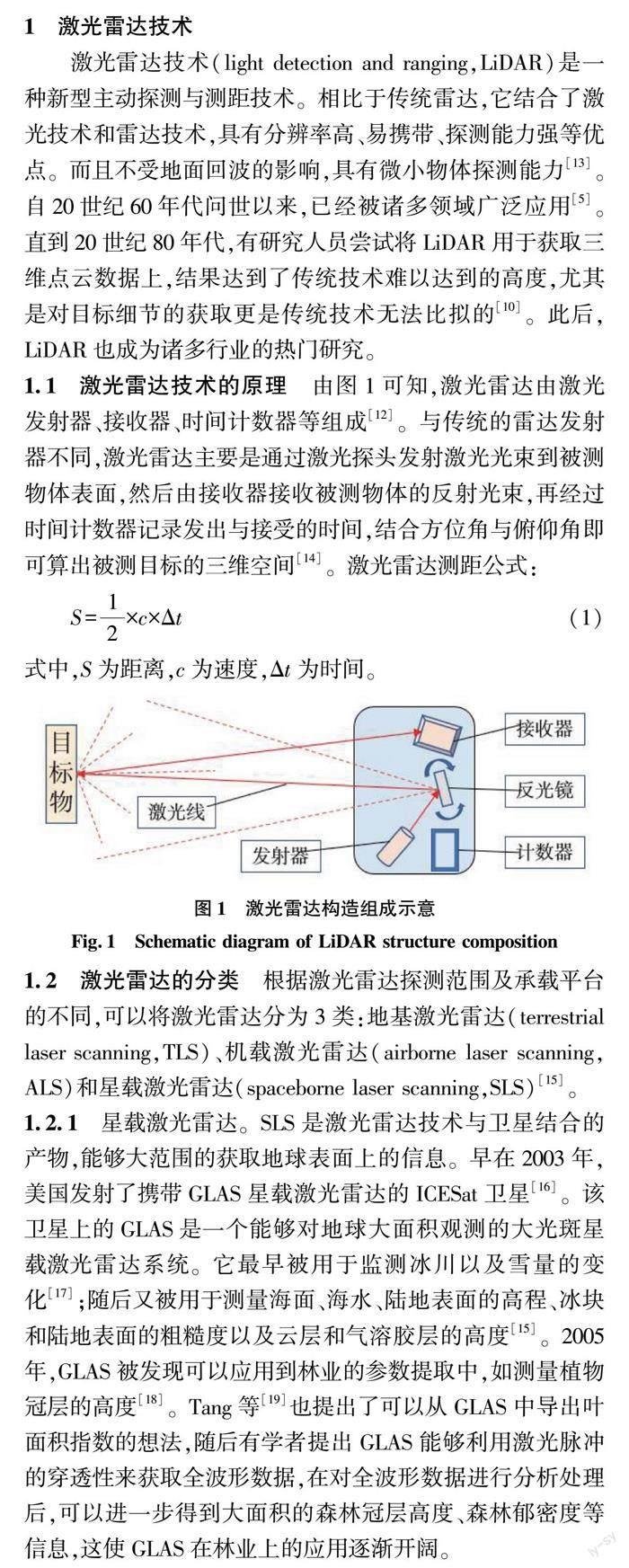
1.1 激光雷達技術的原理
由圖1可知,激光雷達由激光發射器、接收器、時間計數器等組成[12]。與傳統的雷達發射器不同,激光雷達主要是通過激光探頭發射激光光束到被測物體表面,然后由接收器接收被測物體的反射光束,再經過時間計數器記錄發出與接受的時間,結合方位角與俯仰角即可算出被測目標的三維空間[14]。
激光雷達測距公式:
S=12×c×Δt(1)
式中,S為距離,c為速度,Δt為時間。
1.2 激光雷達的分類
根據激光雷達探測范圍及承載平臺的不同,可以將激光雷達分為3類:地基激光雷達(terrestrial laser scanning,TLS)、機載激光雷達(airborne laser scanning,ALS)和星載激光雷達(spaceborne laser scanning,SLS)[15]。
1.2.1 星載激光雷達。
SLS是激光雷達技術與衛星結合的產物,能夠大范圍的獲取地球表面上的信息。早在2003年,美國發射了攜帶GLAS星載激光雷達的ICESat衛星[16]。該衛星上的GLAS是一個能夠對地球大面積觀測的大光斑星載激光雷達系統。它最早被用于監測冰川以及雪量的變化[17];隨后又被用于測量海面、海水、陸地表面的高程、冰塊和陸地表面的粗糙度以及云層和氣溶膠層的高度[15]。2005年,GLAS被發現可以應用到林業的參數提取中,如測量植物冠層的高度[18]。Tang等[19]也提出了可以從GLAS中導出葉面積指數的想法,隨后有學者提出GLAS能夠利用激光脈沖的穿透性來獲取全波形數據,在對全波形數據進行分析處理后,可以進一步得到大面積的森林冠層高度、森林郁密度等信息,這使GLAS在林業上的應用逐漸開闊。
1.2.2 機載激光雷達。
ALS是目前主流的一種主動遙感技術,它是由激光、全球定位系統(GPS)以及慣性導航系統(INS)組成的[20]。它不僅能夠快速、精準地獲取地面上的三維信息,并且還具有穿透性,可以穿透林分冠層并獲得高精度的森林冠層以及林分內部結構信息。與傳統攝影相比,ALS不受日光條件的限制,即使在夜晚也能不停作業,因此,在20世紀末迅速發展起來,并已經被應用到地形考察、林業調查、道路規劃等各個領域[21],進入21世紀,在林業上的應用也逐漸變得成熟、完整,龐勇等[22]利用機載激光雷達提取出林分的平均樹高;付甜等[23]利用機載激光雷達估測出森林生物量等。
1.2.3 地基激光雷達。
TLS技術產生于20世紀90年代[2],是傳統雷達與現代激光技術結合的產物,通過位置、距離、角度等觀測數據直接獲取目標表面點的三維坐標[5],使其在高精度三維冠層信息的實時獲取方面有極大的優勢,并且可以高效地建立起被測物的三維模型。TLS起初更多地被應用于地形的勘測、文物保護、建筑物建模等方面[24],而在2002 年,Lefsky等[25]首次提出地基激光雷達可無破壞地獲取森林的三維結構,尤其是垂直結構信息,TLS在林業內得到飛速地發展。
2 傳統的葉面積指數測定
近年來,隨著國際社會對全球變暖的關注度不斷提升,針對植被碳水循環模型的研究逐漸深入,作為定量刻畫植被冠層特征的關鍵指數之一,準確獲取不同尺度LAI具有重要意義,使得針對LAI測定的研究逐漸增加,推進了LAI測定的發展。由于LAI的重要性及準確獲取的困難性,使如何高精準地測定LAI成為研究的熱門。傳統的葉面積指數的測量方法大致可分為直接法與間接法[2]。
2.1 直接測量法
直接測量法是一種經典成熟的測量LAI的方法,主要是指通過測量儀器與手動測量目標對象部分葉片的表面積,在根據公式計算出葉面積指數。直接測量法具體分為:
①直接收獲法,該方法是直接收獲植物的葉片,并將其烘干稱重,在通過測量出葉片的表面積,最后計算得出LAI[6]。
②異速生長方程法,該方法是2003年Bréda[26]提出的,主要通過建立 LAI 與樹高、胸徑的關系,再根據葉的比葉面積來估算 LAI。
③凋落物法,在針闊混交林樣地中放收集網收集落葉,并稱其葉片的干重,再通過測量其表面積,計算得出LAI[27]。
④破壞性采樣法,此方法是典型的破壞性收集葉片的方法,它通過選取目標樣地中有代表性的樹木,對其葉片進行分層采樣、計算LAI,以代表整個樣地[20]。
直接測量的各個方法雖然有所差異,但本質上都是完全的人工測量,過程煩瑣而且復雜,所以只適合用在單株或樣地水平上的測量。而且在測量的過程中不僅需要耗費大量的人力物力,對植物更具有一定的破壞性,所以直接測量法更多是被用于間接方法的驗證[28]。
2.2 間接測量法
間接測量法指的是無破壞地收集目標數據,再根據收集到的數據進行分析、計算,進而推出葉面積指數的一種方法。該方法不僅可以高效、無破壞地獲取LAI,而且還能夠用于檢測不同類型森林的LAI的季節動態變化[8]。光學儀器法是目前使用最廣泛的間接測量LAI的方法,主要分為:
①半球攝影法,半球攝影法是通過數碼相機從底向上拍攝植被,對得到的圖像進行處理、計算,得到冠層的間隙率,進而計算LAI的一種方法。該方法的關鍵在于提取的間隙率精度,精度越高,LAI越準確[28]。
②LAI-2200c植物冠層分析法,LAI-2200c通過測量冠層上下方的太陽輻射強度可以直接獲取冠層的間隙率信息,這種方法相比于半球攝影速度更快,但受天氣的影響較大[27]。
③TRAC冠層輻射分析儀,它通過記錄太陽光線穿過植被冠層的過程,得出冠層孔隙率以及分布,進而計算出LAI[1]。
④HemiView 冠層分析儀,該方法與半球攝影法的原理相似,不同的是該方法可以收集彩色圖像進行數據處理,進而得到LAI[29]。
然而,間接測量法雖然可以快速獲取LAI,但是由于天頂角、木質部、聚集指數等因素的影響[30],導致測量結果會產生一定的誤差,如羅光浪等[20]采用半球攝影與LAI-2200c對不同林齡的馬尾松人工林估測LAI,結果顯示半球攝影法測定的LAI平均低估50%,LAI-2200測定值低估41%,所以間接測量結果不能被定義為實際值,而是有效值[31]。
傳統測量方法固然有很多,但卻始終無法滿足LAI測定的需求,而激光雷達的出現使LAI的測量有了新的方向。激光雷達技術作為一種主動的遙感技術,也屬于間接測量法中的一種,它通過獲取植被的精準三維信息,可以有效地評估樹冠特征、植被的垂直結構信息,不僅提高了葉面積指數估算的準確性,也避免了葉面積指數較高樹冠的飽和效應。
3 激光雷達反演葉面積指數的關鍵技術
在使用激光雷達收集數據時,特別是在野外的天然林,森林中有很多的昆蟲、鳥類和其他非目標物也會被收集,同時林中的地形不一也會影響最終結果。因此,有必要對采集的點云數據進行預處理,以獲得高精度的模型。在激光雷達的發展進程中,點云數據的處理方法不斷更新和改進,旨在更快、更準確地提取森林參數。其中最為關鍵的就是點云的配準、去噪以及分類技術。
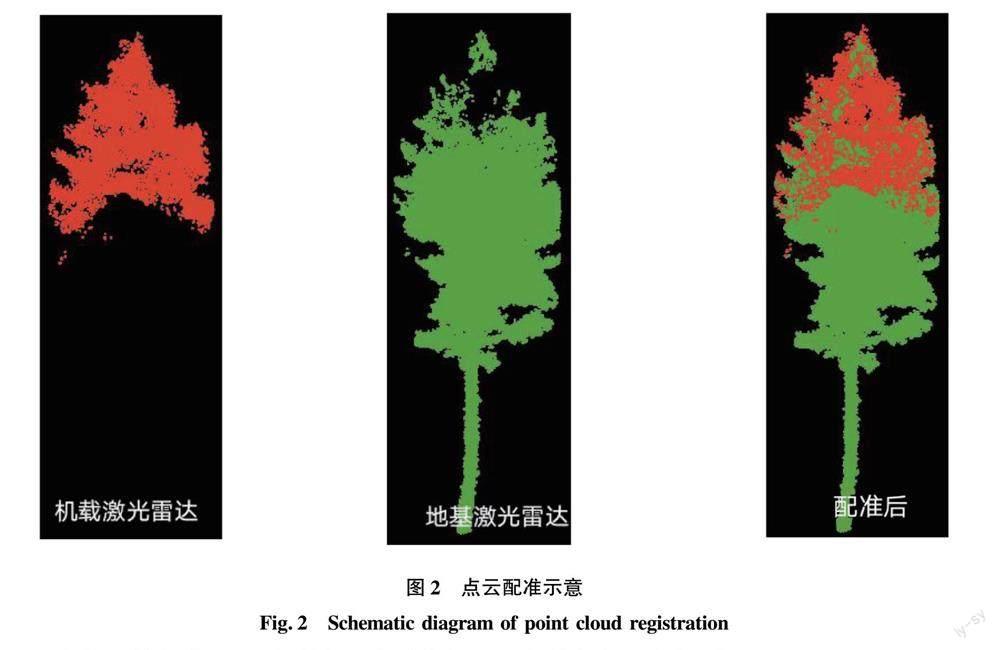
3.1 點云的配準
在激光雷達掃描樣地的過程中,由于植被之間相互遮擋以及掃描儀器掃描范圍的限制,會造成掃描信息的缺失。因此,為了獲得完整的目標樣地,需要從不同的角度對樣地進行多次掃描,然后將多次掃描的數據進行組合,形成完整的目標樣地,該過程就被稱作配準(圖2)。點云的配準尤為關鍵,匹配不準確會直接影響最終的結果。Besl等[32]在1992年首次提出了一種高層次的基于自由形態曲面的配準方法,即迭代最近點法(iterativeclosestpoint,ICP),它是一種精確配準算法。該算法的配準精度和運行速度取決于點云的初始位姿和數量大小,在初始位姿相近且點數數量少時,ICP的算法就越精準和快速,反之,則計算時間較長。隨后又有一些學者在此基礎上相繼提出了EM-ICP算法[33]、基于特征點的ICP算法[34]、基于主成分分析法的ICP算法等[35],使ICP算法不斷發展與優化,但配準速率與精度仍有不足。直到2020年,楊玉澤等[36]提出了基于特征直方圖的初始配準與正態分布變換(normal distributions transform,NDT)精確配準相結合的配準方法,并與ICP、NDT、FPFH-ICP做比較,結果顯示FPFH-ICP精確度最高,NDT算法運行速度最快,FPFH-NDT綜合情況最優。
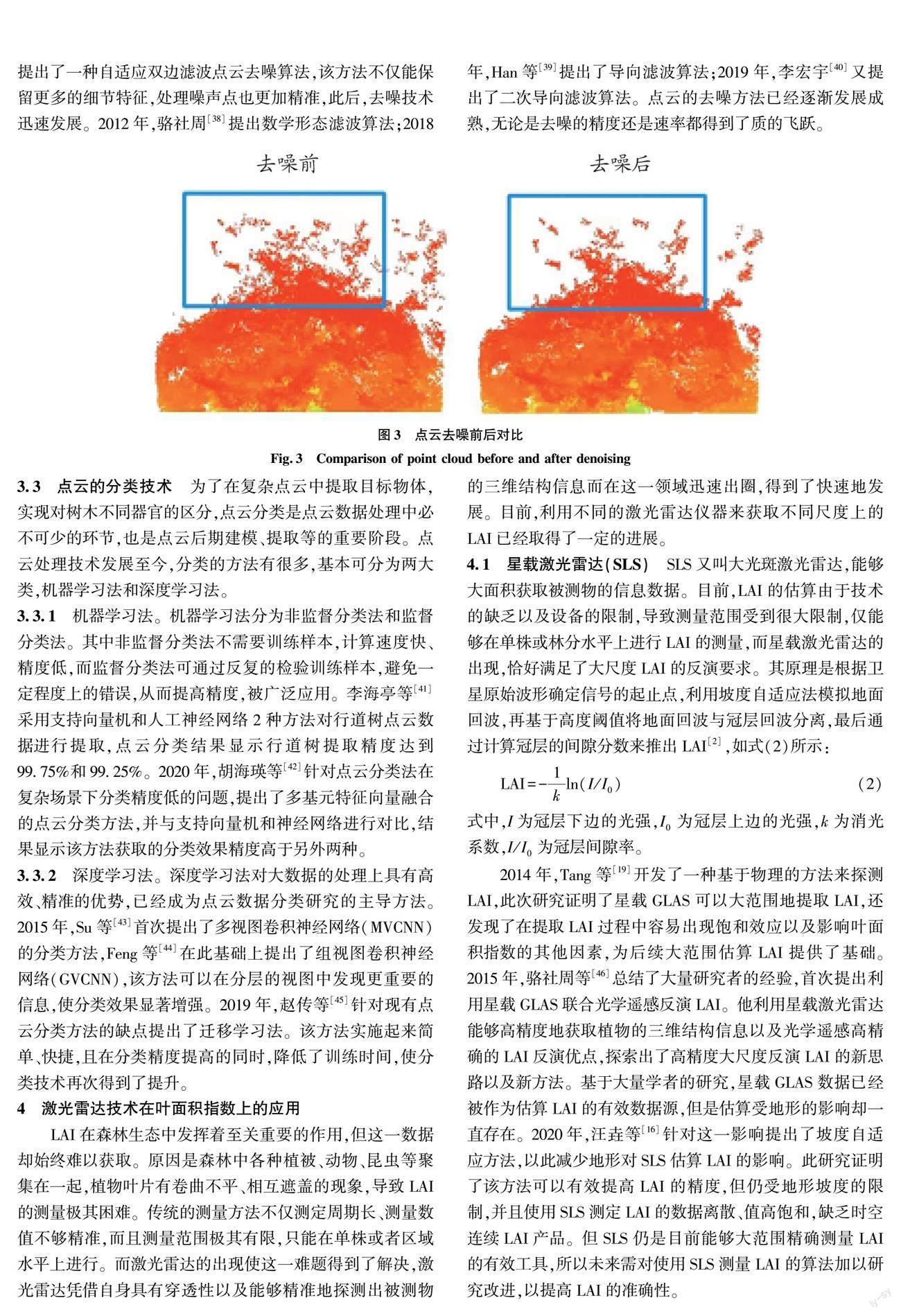
3.2 點云的去噪
在使用激光雷達對目標數據進行采集的過程中,由于環境和自身的影響,如激光雷達掃描儀的聲音、天空中突然飛過來的鳥、森林中昆蟲的叫聲等因素,都會成為掃描過程中不可控的噪聲點,噪聲點一般為孤立點,通常會明顯高于地面或者物體。這些噪聲點的存在會極大地影響試驗的結果,因此為了保證后續三維點云的建模,需要對這些不應該存在的噪聲點進行處理。這個過程也稱為點云去噪或點云濾波(圖3)。
學者提出了不同的點云去噪方法,以便能夠更好地處理點云數據。有研究者提出了中值濾波的去噪算法,該方法是通過影像的處理技術來實現點云的去噪,但只適用于有序點云的去噪,并且在去噪的同時,對點云的有用信息也會造成丟失。此后,越來越多的學者進行了試驗,但點云噪聲點的自動識別和完全去除還沒有取得很大的進展,肖國新等[37]提出了一種自適應雙邊濾波點云去噪算法,該方法不僅能保留更多的細節特征,處理噪聲點也更加精準,此后,去噪技術迅速發展。2012年,駱社周[38]提出數學形態濾波算法;2018年,Han等[39]提出了導向濾波算法;2019年,李宏宇[40]又提出了二次導向濾波算法。點云的去噪方法已經逐漸發展成熟,無論是去噪的精度還是速率都得到了質的飛躍。
3.3 點云的分類技術
為了在復雜點云中提取目標物體,實現對樹木不同器官的區分,點云分類是點云數據處理中必不可少的環節,也是點云后期建模、提取等的重要階段。點云處理技術發展至今,分類的方法有很多,基本可分為兩大類,機器學習法和深度學習法。
3.3.1 機器學習法。
機器學習法分為非監督分類法和監督分類法。其中非監督分類法不需要訓練樣本,計算速度快、精度低,而監督分類法可通過反復的檢驗訓練樣本,避免一定程度上的錯誤,從而提高精度,被廣泛應用。李海亭等[41]采用支持向量機和人工神經網絡2種方法對行道樹點云數據進行提取,點云分類結果顯示行道樹提取精度達到99.75%和99.25%。2020年,胡海瑛等[42]針對點云分類法在復雜場景下分類精度低的問題,提出了多基元特征向量融合的點云分類方法,并與支持向量機和神經網絡進行對比,結果顯示該方法獲取的分類效果精度高于另外兩種。
3.3.2 深度學習法。
深度學習法對大數據的處理上具有高效、精準的優勢,已經成為點云數據分類研究的主導方法。2015年,Su等[43]首次提出了多視圖卷積神經網絡(MVCNN)的分類方法,Feng等[44]在此基礎上提出了組視圖卷積神經網絡(GVCNN),該方法可以在分層的視圖中發現更重要的信息,使分類效果顯著增強。2019年,趙傳等[45]針對現有點云分類方法的缺點提出了遷移學習法。該方法實施起來簡單、快捷,且在分類精度提高的同時,降低了訓練時間,使分類技術再次得到了提升。
4 激光雷達技術在葉面積指數上的應用
LAI在森林生態中發揮著至關重要的作用,但這一數據卻始終難以獲取。原因是森林中各種植被、動物、昆蟲等聚集在一起,植物葉片有卷曲不平、相互遮蓋的現象,導致LAI的測量極其困難。傳統的測量方法不僅測定周期長、測量數值不夠精準,而且測量范圍極其有限,只能在單株或者區域水平上進行。而激光雷達的出現使這一難題得到了解決,激光雷達憑借自身具有穿透性以及能夠精準地探測出被測物的三維結構信息而在這一領域迅速出圈,得到了快速地發展。目前,利用不同的激光雷達儀器來獲取不同尺度上的LAI已經取得了一定的進展。
4.1 星載激光雷達(SLS)
SLS又叫大光斑激光雷達,能夠大面積獲取被測物的信息數據。目前,LAI的估算由于技術的缺乏以及設備的限制,導致測量范圍受到很大限制,僅能夠在單株或林分水平上進行LAI的測量,而星載激光雷達的出現,恰好滿足了大尺度LAI的反演要求。其原理是根據衛星原始波形確定信號的起止點,利用坡度自適應法模擬地面回波,再基于高度閾值將地面回波與冠層回波分離,最后通過計算冠層的間隙分數來推出LAI[2],如式(2)所示:
LAI=-1kln(I/I0)(2)
式中,I為冠層下邊的光強,I0為冠層上邊的光強,k為消光系數,I/I0為冠層間隙率。
2014年,Tang等[19]開發了一種基于物理的方法來探測LAI,此次研究證明了星載GLAS可以大范圍地提取LAI,還發現了在提取LAI過程中容易出現飽和效應以及影響葉面積指數的其他因素,為后續大范圍估算LAI提供了基礎。2015年,駱社周等[46]總結了大量研究者的經驗,首次提出利用星載GLAS聯合光學遙感反演LAI。他利用星載激光雷達能夠高精度地獲取植物的三維結構信息以及光學遙感高精確的LAI反演優點,探索出了高精度大尺度反演LAI的新思路以及新方法。基于大量學者的研究,星載GLAS數據已經被作為估算LAI的有效數據源,但是估算受地形的影響卻一直存在。2020年,汪垚等[16]針對這一影響提出了坡度自適應方法,以此減少地形對SLS估算LAI的影響。此研究證明了該方法可以有效提高LAI的精度,但仍受地形坡度的限制,并且使用SLS測定LAI的數據離散、值高飽和,缺乏時空連續LAI產品。但SLS仍是目前能夠大范圍精確測量LAI的有效工具,所以未來需對使用SLS測量LAI的算法加以研究改進,以提高LAI的準確性。
4.2 機載激光雷達(ALS)
ALS是目前被應用到葉面積指數反演最多的一項主動技術。機載激光雷達又稱小光斑激光雷達,與星載激光雷達不同的是,它能夠忽視地形,更加準確地收集目標數據,并且能夠穿過冠層,獲得更精準地目標三維結構,雖然范圍相比有所限制,但是能夠更加準確地反演出LAI(圖4)。機載激光雷達通過發射激光掃描植被信息,在穿過冠層時,一部分激光能量反射回來,另一部分激光能量會通過冠層間隙直至地面,進而計算出間隙率[47],從而推算出LAI。其中間隙率是由比爾朗伯定律表示的:
P(θ)=e-G(θ)·LAI/cosθ(3)
式中,P(θ)為天頂角θ的冠層間隙率,G(θ)為單位植物面積投影到垂直于角度θ方向。
2016年,劉婷等[48]嘗試機載激光雷達應用于農業上的LAI測定,以玉米為研究對象,成功研究出了適用于中等高度的農作物的LAI反演的方法,并將結果與實際值做對比,誤差均小于10%。2021年,Song等[49]使用機載激光雷達成功精準地測定出溫帶混交林的LAI,并且精度達到了傳統間接法難以達到的高度。機載激光雷達發展至今,大量的研究都表明了它在LAI反演中的實用性與準確性,不過目前的反演方法與技術還存在諸多的爭議,例如,很多研究者發現在使用機載激光雷達反演LAI時,冠層以下的結構信息會獲取不全,并且結果的精度也會受飛行的高度、掃描的范圍、角度的影響[47]。而且不同的林分、農作物等LAI的反演方法也有所不同,目前機載激光雷達反演葉面積指數的方法包括2種,一種是經驗模型反演法,一種方法是基于比爾朗博定律物理模型法[30],后者是在經驗模型反演的基礎上實現的,它不僅彌補了經驗模型法的弊端,還被挖掘出了巨大的潛力,所以該方法也被廣泛應用,但需要注意的是,不同的林分仍然不可以通用該方法[23]。
4.3 地基激光雷達(TLS)
TLS近年才開始應用到LAI的反演當中,相比星載激光雷達、機載激光雷達,地基激光雷達最適用于LAI的反演,原因在于它能夠準確探測林分的三維結構以及垂直結構,尤其是在森林的垂直結構的探測上具有巨大的優勢[25],機載雖然也能穿過樹冠探測到垂直結構,但遇到樹干、聚集葉片等遮擋,垂直結構仍有缺失,地基激光雷達則在很大程度上避免了該問題(圖5)。TLS中最常用是手持激光雷達和背包激光雷達,兩者不同于其他TLS,如在采20 m×20 m的數據時,單人5~10 min就能夠完成,并且無須后續拼接就能形成完整的地塊[50],是其他TLS無可比擬的。利用TLS提取LAI是根據計算激光束與植被冠層的接觸頻率,公式為:
N(s)=n1(s)/na(s)(4)
式中,N(s)為第s層激光的接觸頻率,n1為第s層的激光點的網格數量,na為第s層的三維網格數量。然后再根據第s層的接觸頻率計算該層的LAI:
L(s)=α(θ)×N(s)(5)
式中,α(θ)為葉片傾斜度校正因子,一般為1.1。最后將所有層的LAI進行累加,即得到區域內的LAI:
LAI=ss=1L(s)=1.1×ss=1n1(s)na(s)(6)
自2002年Lefsky等[25]首次發現了地基激光雷達在LAI反演中具有巨大優勢以來,大量的學者也投入到了地基激光雷達反演LAI的研究當中,截至目前,地基激光雷達在LAI的測定中也有了一定的研究成果,同時在研究過程中也發現了諸多問題。巴比爾江·迪力夏提等[9]使用地基激光雷達測定胡楊的LAI,研究證明地基激光雷達能夠實現快速獲取植被的三維以及垂直結構信息,但由于葉片間的相互遮擋,獲取的點云信息仍會出現缺失;2021年,黃蘭鷹等[5]利用地基激光雷達對毛竹林LAI進行提取,并且評估了噪音與體元大小對LAI的影響,試驗最終表明,有效的去噪以及合適的體素大小會提高LAI的精度;楊玉澤[36]利用地基激光雷達對常綠樹種的LAI進行反演,并使用不同的算法來計算LAI,結果發現不同的算法得到LAI不盡相同,因此,不同樹種選擇合適的算法來計算LAI更加準確。地基激光雷達在LAI的反演中雖然存在很多問題,但對目標物的數據采集卻是現代技術的前沿,隨著研究的推進,后期點云數據的一些處理問題將得以有效解決,未來TLS將會被更加廣泛地應用于LAI的反演。
5 存在問題
激光雷達技術已經越來越成熟,尤其是在LAI反演的應用上,學者們早以不再局限于傳統的方法,而是進入了三維時代,激光雷達技術不僅能夠滿足LAI指數提取的需要,而且相比于傳統測量,完全不需要特定的時間以及特定的天氣就能夠收集大量精準的森林三維數據。但在激光雷達技術的處理上,目前仍存在很多難點。例如,大量的研究[9,23-24,38]發現,現在的技術仍不能滿足激光雷達收集的點云數據后期的處理,并且,在LAI反演中的葉傾角、聚集指數以及體素大小等影響因素也難以徹底解決,雖然激光雷達技術是目前最先進的探測技術,但在LAI的反演中受木質部及葉片間相互遮擋的影響仍會出點云丟失的現象。
5.1 點云的分類體系有待完善
目前的點云分類技術有很多種方法,但大都是種類間的區分(表1),植物、街道、建筑物的區分,更細化也只能達到植物中低矮植物與高等植被的區分,而對于需要更加細化的分類卻難以達到,如木質部與葉片的區分、不同樹種的區分等。
5.2 點云的去噪精度有待提高
點云的去噪方法在不斷更新、優化,去噪的效果也更加精細化,但值得注意的是目前仍然沒有一個完整而統一的去噪體系可以應用于各種林型。
5.3 自動化木質部的提取技術有待研發
如今的木質部的提取都建立在單木的基礎上,對于細枝的處理仍不完全,尤其是針葉樹種,更是無法準確地提取出一棵樹的完整木質部。而對于區域植被木質部的提取更加不準確,并且只能提取出有缺失的樹干。
5.4 區域森林參數的提取精度有待提升
在區域水平上,利用一些點云處理軟件在對點云進行預處理以后,針對大范圍的樹木參數的提取結果誤差仍然與實際差值較大,不能夠應用到實際。
6 激光雷達技術在LAI測量中的展望
6.1 促進多平臺LiDAR數據整合優化
受不同LiDAR平臺獲取信息角度及激光傳統能力的限制,無論是使用SLS、ALS還是TLS,對目標物的掃描信息都有丟失的現象發生。對此通過整合地基與機載激光雷達的點云數據,并打通SLS與其他2種平臺的尺度壁壘,能夠使目標的三維結構信息得到有效互補,取得針對森林冠層的多尺度、高精度空間細節特征,這種SLS、TLS、ALS的結合將會給未來森林LAI的獲取帶來新的思維模式。
6.2 探索光譜特征與雷達點云數據融合
與其他地物不同,植被的生長所依賴的光合作用導致植被葉片具有獨特的光譜特征,并且在光學遙感領域得到了深度的應用,但目前針對LiDAR點云的研究多集中在三維空間內的位置信息的整合與提取。隨著攜帶RGB相機的新型激光雷達出現[10],空間點云已經能夠攜帶XYZ以外的少量光譜特征,研發融合空間和光譜特征的點云分類技術,獲取更為精細的樹木各類型器官的空間信息,將對林學和生態方向的科學研究產生重要影響。
6.3 建立LiDAR在林業領域標準化技術
目前LiDAR技術在國內尚處于新興階段,雖然已經涌現了諸多應用的成功案例[12],但距產生行業影響仍有巨大差距。其原因除LiDAR設備成本較高外,規范化的作業流程和完善的技術細節要求缺失均影響著LiDAR的大規模應用,未來隨著LiDAR設備普及程度提高,林業工作中豐富的應用場景和長周期標準化的數據需求,勢必會推動相關技術規范和行業標準的出臺,并繼續推動LiDAR技術在林業行業中的深入發展。
參考文獻
[1] 趙傳燕,沈衛華,彭煥華.祁連山區青海云杉林冠層葉面積指數的反演方法[J].植物生態學報,2009,33(5):860-869.
[2] FANG H L,BARET F,PLUMMER S,et al.An overview of global leaf area index(lai):Methods,products,validation,and applications[J].Reviews of geophysics,2019,57(3):739-799.
[3] 蔣麗偉,張家琦,趙一臣,等.北京山區典型林分生長季葉面積指數動態變化[J].林業資源管理,2019(2):132-136.
[4] WATSON D J.Comparative physiological studies on the growth of field crops:II.The effect of varying nutrient supply on net assimilation rate and leaf area[J].Annals of botany,1947,11(4):375-407.
[5] 黃蘭鷹,鄭亞雄,張美曼,等.應用地基激光雷達對毛竹林有效葉面積指數的提取及敏感性分析[J].東北林業大學學報,2021,49(9):67-71,118.
[6] CHEN J M,RICH P M,GOWER S T,et al.Leaf area index of boreal forests:Theory,techniques,and measurements[J].Journal of geophysical research,1997,102(D24):29429-29443.
[7] MYNENI R B,RAMAKRISHNA R,NEMANI R,et al.Estimation of global leaf area index and absorbed par using radiative transfer models[J].IEEE transactions on geoscience and remote sensing,1997,35(6):1380-1393.
[8] 劉志理.東北典型森林葉面積指數的時空動態[D].哈爾濱:東北林業大學,2015.
[9] 巴比爾江·迪力夏提,玉米提·哈力克,艾薩迪拉·玉蘇甫,等.應用地基激光雷達數據估算塔里木河下游胡楊葉面積指數[J].東北林業大學學報,2020,48(11):46-50.
[10] 劉斌,張軍,魯敏,等.激光雷達應用技術研究進展[J].激光與紅外,2015,45(2):117-122.
[11] 駱社周,王成,張貴賓,等.機載激光雷達森林葉面積指數反演研究[J].地球物理學報,2013,56(5):1467-1475.
[12] 韓婷婷.激光雷達數據在森林垂直結構參數反演中的應用綜述[J].北京測繪,2020,34(8):1061-1065.
[13] 李丹,岳彩榮.激光雷達在森林參數反演中的應用[J].測繪與空間地理信息,2011,34(6):54-58.
[14] WULDER M A,BATER C W,COOPS N C,et al.The role of LiDAR in sustainable forest management[J].Forestry chronicle,2008,84(6):807-826.
[15] 岳春宇,鄭永超,邢艷秋,等.星載激光遙感林業應用發展研究[J].紅外與激光工程,2020,49(11):105-114.
[16] 汪垚,方紅亮,張英慧,等.基于機載LVIS和星載GLAS波形LiDAR數據反演森林LAI[J].遙感技術與應用,2020,35(5):1004-1014.
[17] DEEMS J S,PAINTER T H,FINNEGAN D C.Lidar measurement of snow depth:A review[J].Journal of glaciology,2013,59(215):467-479.
[18] LEFSKY M A,HARDING D J,KELLER M,et al.Estimates of forest canopy height and aboveground biomass using ICESat[J].Geophysical research letters,2005,32(22):1-4.
[19] TANG H,BROLLY M,ZHAO F,et al.Deriving and validating Leaf Area Index(LAI)at multiple spatial scales through lidar remote sensing:A case study in Sierra National Forest,CA[J].Remote sensing of environment,2014,143:131-141.
[20] 羅光浪,何世強,譚偉,等.不同林齡馬尾松人工林葉面積指數的測定[J].中南林業科技大學學報,2022,42(2):55-64.
[21] 劉魯霞,龐勇.機載激光雷達和地基激光雷達林業應用現狀[J].世界林業研究,2014,27(1):49-56.
[22] 龐勇,趙峰,李增元,等.機載激光雷達平均樹高提取研究[J].遙感學報,2008,21(1):152-158.
[23] 付甜,黃慶豐.基于機載激光雷達數據的森林生物量估測研究進展[J].林業勘查設計,2010(4):86-89.
[24] 張穎,賈煒瑋.基于地基激光雷達的落葉松人工林 枝條因子提取和建模[J].應用生態學報,2021,32(7):2505-2513.
[25] LEFSKY M A,COHEN W B,PARKER G G,et al.Lidar remote sensing for ecosystem studies:Lidar,an emerging remote sensing technology that directly measures the three-dimensional distribution of plant canopies,can accurately estimate vegetation structural attributes and should be of particular interest to forest,landscape,and global ecologists[J].BioScience,2002,52(1):19-30.
[26] BRDA N J J.Ground-based measurements of leaf area index:A review of methods,instruments and current controversies[J].Journal of experimental botany,2003,54(392):2403-2417.
[27] 王寶琦,劉志理,戚玉嬌,等.利用不同方法測定紅松人工林葉面積指數的季節動態[J].生態學報,2014,34(8):1956-1964.
[28] 周星.基于半球冠層攝影法的葉面積指數測量算法研究[D].成都:電子科技大學,2021.
[29] 李慧,陳少雄.基于兩種冠層分析儀的桉樹葉面積指數測算[J].桉樹科技,2014,31(1):16-22.
[30] GEORGE J P,YANG W,KOBAYASHI H,et al.Method comparison of indirect assessments of understory leaf area index(LAIu):A case study across the extended network of ICOS forest ecosystem sites in Europe[J/OL].Ecological indicators,2021,128[2022-09-21].https://doi.org/10.1016/j.ecolind.2021.107841.
[31] 劉婷,陳晨,范文義,等.基于不同空間尺度遙感影像估算 森林葉面積指數的差異[J].應用生態學報,2019,30(5):1687-1698.
[32] BESL P J,MCKAY N D.Method for registration of 3-D shapes[C]//Proceedings of the sensor fusion IV:Control paradigms and data structures.Boston,MA,United States:SPIE,1992.
[33] GRANGER S,PENNEC X.Multi-scale EM-ICP:A fast and robust approach for surface registration[C]//Proceedings of the 7th European conference on computer vision.Copenhagen,Denmark:Springer-Verlag,2002.
[34] 戴靜蘭,陳志楊,葉修梓.ICP算法在點云配準中的應用[J].中國圖象圖形學報,2007,12(3):517-521.
[35] 朱新宇,萬劍華,劉善偉,等.改進的ICP點云配準算法[J].海洋測繪,2015,35(2):77-79.
[36] 楊玉澤.基于地基激光雷達的樹木點云數據處理及三維建模[D].哈爾濱:東北林業大學,2020.
[37] 肖國新,于輝,周曉輝.一種自適應雙邊濾波點云去噪算法[J].信息技術,2017,41(10):118-120.
[38] 駱社周.激光雷達遙感森林葉面積指數提取方法研究與應用[D].北京:中國地質大學(北京),2012.
[39] HAN X F,JIN J S,WANG M J,et al.Guided 3D point cloud filtering[J].Multimedia tools & applications,2018,77(13):17397-17411.
[40] 李宏宇.激光雷達的點云數據處理研究[D].長春:長春理工大學,2019.
[41] 李海亭,肖建華,李艷紅,等.機器學習在車載激光點云分類中的應用研究[J].華中師范大學學報(自然科學版),2015,49(3):460-464.
[42] 胡海瑛,惠振陽,李娜.基于多基元特征向量融合的機載LiDAR點云分類[J].中國激光,2020,47(8):237-247.
[43] SU H,MAJI S,KALOGERAKIS E,et al.Multi-view convolutional neural networks for 3D shape recognition[C]//2015 Proceedings of the IEEE international conference on computer vision.Santiago,Chile:IEEE,2015.
[44] FENG Y F,ZHANG Z Z,ZHAO X B,et al.GVCNN:Group-view convolutional neural networks for 3D shape recognition[C]//2018 IEEE/CVF conference on computer vision and pattern recognition.Salt Lake City,UT,USA:IEEE,2018.
[45] 趙傳,張保明,余東行,等.利用遷移學習的機載激光雷達點云分類[J].光學精密工程,2019,27(7):1601-1612.
[46] 駱社周,王成,習曉環,等.星載激光雷達GLAS與TM光學遙感聯合反演森林葉面積指數[J].紅外與毫米波學報,2015,34(2):243-249.
[47] TIAN L,QU Y H,QI J B.Estimation of forest LAI using discrete airborne LiDAR:A review[J].Remote sensing,2021,13(12):1-17.
[48] 劉婷,蘇偉,王成,等.基于機載LiDAR數據的玉米葉面積指數反演[J].中國農業大學學報,2016,21(3):104-111.
[49] SONG J L,ZHU X A,QI J B,et al.A method for quantifying understory leaf area index in a temperate forest through combining small footprint full-waveform and point cloud LiDAR data[J].Remote sensing,2021,13(15):1-17.
[50] ASCHOFF T,THIES M,SPIECKER H.Describing forest stands using terrestrial laser-scanning[J].Int Arch Photogramm Remote Sens Inf Sci,2004,35:237-241.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
