一種阻隔板結合烘干功能的多功能掃地機器人
2023-08-01 03:28:32王云通桑俊垚薛凱峰顧宗磊
現代信息科技 2023年11期
王云通 桑俊垚 薛凱峰 顧宗磊

摘? 要:針對目前掃地機器人普遍存在價格高、功耗大、無法合理解決地面水漬等問題,提出一種阻隔板結合烘干功能的多功能掃地機器人設計,對相關掃地機器人進行了改良。綜合效率、功率等因素,選用2HB064M混合式驅動器和86BYG2503的步進電機;對出水裝置進行了改良,采用阻隔板控制并用卡扣固定;采用小功率烘干裝置來清除地面水漬,該設計主要解決的是地面水漬問題。并對樣機試驗的結果分析,校核了部件參數,讓整機的結構更符合真實環境使用。
關鍵詞:掃地機器人;調節出水量;小功率;烘干
中圖分類號:TP242;TH122? 文獻標識碼:A? 文章編號:2096-4706(2023)11-0179-04
A Multifunctional Sweeping Robot with Barrier Plate and Drying Function
WANG Yuntong, SANG Junyao, XUE Kaifeng, GU Zonglei
(School of Mechanical and Vehicle Engineering, Linyi University, Linyi? 276000, China)
Abstract: Aiming at the general problems of high price, high power consumption, and inability to solve the problem of water stains on the ground, a multifunctional sweeping robot design with barrier plate and drying function is proposed, and the relevant sweeping robots are improved. Considering efficiency, power and other factors, 2HB064M hybrid driver and 86BYG2503 stepping motor are selected. The water outlet device has been improved, which is controlled by a barrier plate and fixed by a clip. The design uses a small power drying device to remove water stains on the ground and the design mainly solves the problem of water stains on the ground. The results of the prototype test are analyzed, and the parameters of the components are checked to make the structure of the whole machine more suitable for the real environment.
Keywords: sweeping robot; regulation of water output; miniwatt; drying
0? 引? 言
隨著社會的發展,人們生活節奏逐漸變快,工作壓力持續增大,從繁重的家務勞動中解脫出來成為多數人的迫切需要,而傳統方式上聘請家政人員不僅價格昂貴,而且效率低下。這都為人工智能領域提供發展契機,尤其在家居方面的清潔一體化設備如雨后春筍般出現。
早在20世紀90年代,瑞典率先提出了一種清潔機器人并小規模量產,隨后美國、英國等發達國家也進軍該領域,掃拖一體機器人也正朝著精巧化、智能化方向發展。國內掃地機器人技術研究起步較晚,存在許多問題,比如功耗較大、無法合理解決濕地面清掃問題而帶來二次污染、現有技術中的掃地機器人采用固定抹布的方式工作居多、以及在拖地時抹布很容易出現變干或水分過多等問題。
為了滿足清潔機器人市場的需求,有效清潔。本文綜合國內外清潔機器人的優劣,針對掃拖一體機機器人作出改進并給出具體方案,提出一種阻隔板結合烘干功能的多功能掃地機器人設計,并通過樣機測試實驗校核,確保符合設計要求。
1? 總體方案設計
1.1? 整體組成
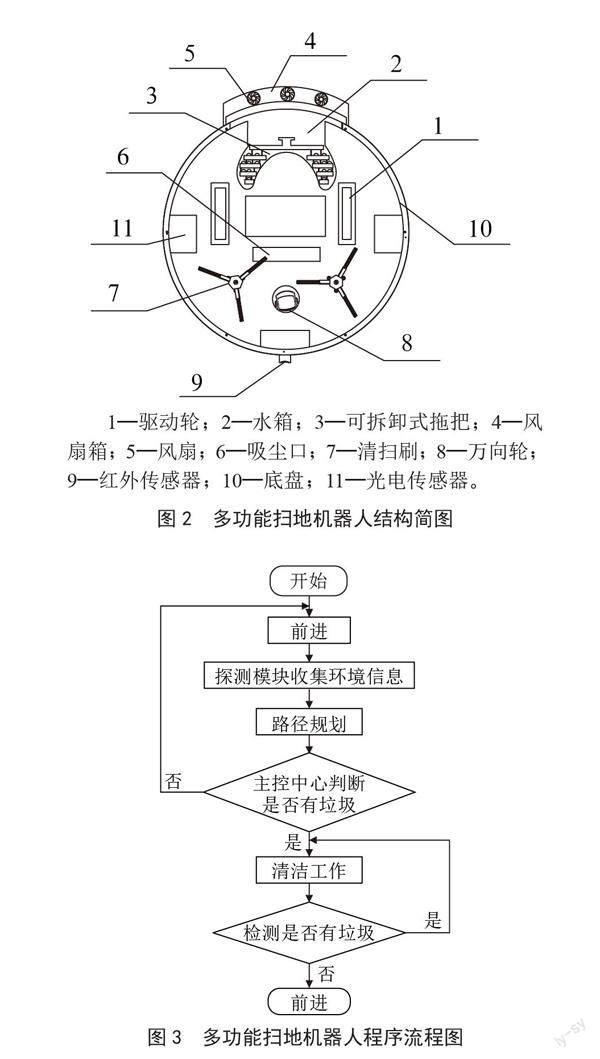
本設計的目的是設計一種可靠、清潔效率高、具備烘干等多功能掃地機器人,具體組成是由探測模塊、清掃模塊、拖地模塊、行走模塊、風干模塊、主控模塊組成,主要部件包括:驅動輪、光電編碼盤、水箱、可拆卸式拖把、風扇箱、風扇、清掃刷、萬向輪、紅外傳感器、光電傳感器、阻隔板、電熱絲等裝置,其三維模型如圖1所示,其結構簡圖如圖2所示。
1.2? 工作原理
本文設計的多功能掃地機器人程序流程圖,如圖3所示。基本工作原理如下:打開電源后,掃地機器人在行駛過程中由探測模塊收集周圍環境信息,傳輸給STM32F103zet6單片機進行清掃判定,隨后清掃模塊、拖地模塊對清潔區域內的垃圾清除并完成拖洗,風干模塊開始工作,通過風干模塊對清掃區域進行烘干,最后由主控中心判斷已清掃區域是否仍有垃圾,如有則繼續清掃工作,無則完成整個工作程序。
2? 關鍵部件結構設計
2.1? 探測模塊
探測模塊直接與主控中心相連,將收集的環境信息轉換成電信號傳輸給主控模塊,實現信息傳遞。
探測模塊包括三個光電傳感器和一個紅外線傳感器,光電傳感器分布在底盤的前部左部和右部,作為臺階檢測傳感器,防止跌落;紅外線傳感器安裝在前端,作為碰撞檢測傳感器,防止碰撞、實現精確定位和路徑規劃。
型號方面,光電傳感器選擇角度位移傳感器,其原理簡單,設計簡便,如果馬達角度傳感器構造運轉,而齒輪不轉證明遇到障礙物;紅外線傳感器方面,選用主動式紅外傳感器[1],當紅外線的發射和接受系統之間的不可見的光路被阻擋時,接收裝置迅速反應,發出電信號提示光路被阻礙,從而實現碰撞檢測作用。
2.2? 行走模塊
掃地機器人的正確行駛是一待解決的問題。為實現這一目的,本文設計采用驅動輪差速運動控制,在行走模塊上采用在驅動輪上安裝光電編碼盤[2],實現對輪速的控制、調節;驅動輪差速運動配合萬向輪實現任意方向轉向,確保在小距離內進行轉向,使掃地機器人更加靈活,能夠適應多樣環境。
由于掃地機器人整機安裝在底盤上面,所以底盤上的行走模塊應具有足夠的承載能力并能提供足夠動力。故本文設計的多功能掃地機器人采用選用型號為2HB064M兩相細分混合式步進電機驅動器[3],驅動電機選用的型號為86BYG2503的步進電機,與所用驅動器相適應匹配,能為掃地機器人提供更大扭矩,以此輸出更大動力。除此之外,在驅動輪最外圈設有橡膠花紋,以增強驅動輪抓地力,防止出現打滑失效現象,保證機器正常運轉。
2.3? 清掃模塊
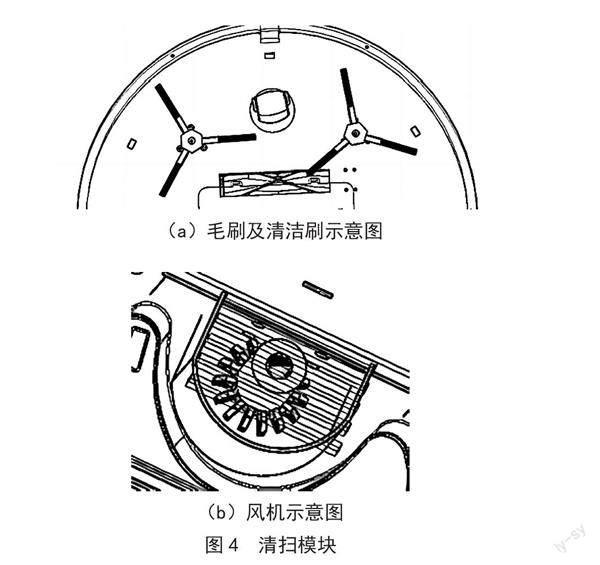
清掃模塊主要是完成清掃,為拖地前做預處理工作。清掃模塊由毛刷、清潔刷、電機、風機和灰塵盒組成,如圖4所示。在接到主控中心清掃判定之后,清掃模塊配合多個傳感器開始工作,兩個清掃刷電機采用150 r/min的9 V普通直流微型電機驅動,使左面清掃刷順時針轉動,右面清掃刷逆時針轉動,從而將灰塵集中于吸塵口處,再由毛刷和風機將垃圾吸入灰塵盒內,實現地面的預清理。
2.4? 拖地模塊
拖地模塊包括可拆卸式拖把和水箱,如圖5(a)所示。拖把連接水箱,在拖把上平面設有磁鐵,拖把下平面設有出水孔,阻隔板與出水孔配合,利用阻隔板擋住出水孔的大小,以達到控制出水量目的;為提高密封性、防止滲水,在拖把上固定有卡扣,卡扣與拖把連接處設有密封圈。阻隔板上設有海綿通過魔術貼連接,以方便拖地海綿拆卸清洗。
如圖5(b)和圖6所示,阻隔板上的連接柱與卡扣滑動連接,另設有調節推扭,調節推扭可以方便人員對阻隔板的上下移動,從而控制出水孔大小以實現出水量調節;在調節推扭上設有防滑條紋,增大摩擦力,方便控制。
外殼內部固定有一塊鐵板,利用拖把上平面固定的磁鐵,與外殼內部的鐵板配合,固定拖把和水箱。
2.5? 風干模塊
為了合理解決濕地面清掃問題帶來二次污染,以及濕地面帶來的諸多問題,本文設計了風干模塊[4],實現對清潔區域的烘干。風干模塊固定在外殼上,主要是風扇箱。風扇箱內設有三個風扇,均勻分布在風扇箱上。風干模塊的主要作用是烘干地面,合理解決濕地面帶來的問題,為了更好實現這一目的,在風扇箱內還設有電熱絲,電熱絲用來加熱空氣,風扇將加熱的空氣持續吹出,達到烘干地面的效果。
工作中可能會有溫度過高造成機器損壞,烘干工作效率下降,為了避免這種情況,采用型號為DS18B20的溫度傳感器,設定溫度閾值對工作溫度進行有效監測。溫度超過設定閾值則會發出提醒,主控中心判定暫停工作。
2.6? 控制系統
本文設計的阻隔板結合烘干功能的多功能掃地機器人的主控模塊,采用 STM32F103zet6單片機[5],其作用主要是對探測模塊所收集的環境信息進行運算、判斷,完成對機器人控制。
為了更好控制輪速、自動調整行走軌跡,行走模塊中采用86BYG2503的步進電機和2HB064M兩相細分混合式步進電機驅動器;控制系統選用PID算法,其算法的控制參數相互獨立,參數的選定簡單,結構簡單、穩定性好、工作可靠、調整方便能夠完成連續狀態進程校正,根據對收集的信息與預先給定的數值之間的誤差比例,進行運算、微分、積分,得出結果,通過結果分析,從而達到調整姿態的目的[6]。
2.7? 本章小結
本章節通過對掃地機器人的設計要求分析,最終確定設計方案。考慮到拖地時出水量問題,采用阻隔板對出水量進行控,并由卡扣進行固定;設計中為了滿足小距離內靈活轉向,行動部分采用差速裝置;為確保正確行進,采用PID算法分析運算,實現行進姿態調整;針對地面水漬問題,采用風干模塊來清除地面水漬。
3? 樣機及調試
本文設計的具有可拆卸拖把的多功能掃地機器人主要參數如表1所示。
對本文設計的具有可拆卸拖把多功能掃地機器人對調試,主要針對是否按照規定路線、清潔后地面有無水漬、各模塊正確工作、主控正確判斷四個方面各進行了30次試驗,試驗結果如表2所示。
其中是否按照規定路線受到多方面影響,比如探測模塊傳感器收集的信息是否全面、光電編碼盤檢測輪速是否正確、PID算法運算是否正確、主控判斷是否去除無關影響等;試驗結果顯示,在試驗中出現一次偏差,經過分析確定為主控中心受到探測模塊所收集到的環境信息及光電編碼盤檢測輪速錯誤導致誤判,經過對主控的調試后恢復正常工作,后續試驗中未再出現。
在檢測清潔后地面有無水漬時,結果顯示出現兩次偏差,經過調試分析確認為兩個方面原因:一是風干模塊在長時間連續工作后,機身溫度升高導致加熱效率下降;二是與出現路徑偏差試驗原因一樣,光電編碼盤檢測輪速出現誤差、主控對環境信息判斷錯誤。具體解決是線路改用更阻熱材料,減小線路升溫,在參數分析方面將程序進行優化,改進上下機位連接方式。在針對以上兩個問題調整后,后續多功能掃地機器人試驗成功率達到100%。
4? 結? 論
本文主要完成了多功能掃地機器人的設計和結構改良,本設計主要為了解決機器人出水量過多、拖地過后地面潮濕的問題。通過對國內外已有掃地機器人綜合分析,結合低成本、高效率的設計要求,本文對多功能掃地機器人進行整體設計,并通過樣機實驗分析,得出以下結論:
1)本文設計的一種阻隔板結合烘干地面的多功能掃地機器人,改良設計,新增加烘干地面功能,能夠合理解決濕地面帶來的二次污染、細菌滋生等問題。
2)清潔刷采用對稱逆向設計,最大程度上擴大清潔區域,提高清掃效率。拖把設計可拆卸式采用魔術貼連接,結構簡單,安裝和拆卸方便。
3)設計阻隔板來控制出水箱水量,為了加固連接,設計卡扣固定連接拖把,并有調節推扭對阻隔板上下調節,控制出水量,使水箱出水量平穩。
4)光電編碼盤對輪速的檢測會偶爾出現偏差,在后續的研究需要針對探測和主控的判斷進行優化。
5)在材料選擇方面,應優先選擇耐溫材料,防止因溫度升高造成工作效率下降或機器故障。
6)由于無線通信板傳遞信息時存在延遲,探測信息無法及時傳遞至主控中心導致誤判。在后續研究中,應在電氣元件方面進行優化,并提高程序判斷能力,減少誤判。
參考文獻:
[1] 羅慶生,韓寶玲.一種基于超聲波與紅外線探測技術的測距定位系統 [J].計算機測量與控制,2005(4):304-306+334.
[2] 王鑫,徐鑫,魏強,等.基于DSP和光電編碼器的永磁同步電機速度檢測系統 [J].信息技術與信息化,2011(5):56-58.
[3] 郝新源.兩相混合式步進電機智能驅動器的研究與設計 [D].濟南:山東師范大學,2022.
[4] 王星宇,孫京誥.自清潔掃拖烘掃地機器人的設計與實現 [J].現代信息科技,2021,5(17):155-157+161.
[5] 王瑾,王峰圖,范華,等.基于STM32掃地機器人的設計與實現 [J].國外電子測量技術,2018,37(11):100-103.
[6] 趙佳媞.掃地機器人的電路設計及路徑規劃算法優化 [D].昆明:昆明理工大學,2021.
作者簡介:王云通(2003—),男,漢族,山東曹縣人,本科在讀,研究方向:機械設計制造及其自動化;桑俊垚(2001—),男,漢族,山東桓臺縣人,本科在讀,研究方向:機械設計制造及其自動化;薛凱峰(1981—),男,漢族,山東莒南人,副教授,博士研究生,研究方向:微機電系統設計;顧宗磊(1980—),男,漢族,山東泰安人,講師,碩士研究生,研究方向:計算機輔助設計。
收稿日期:2023-01-10
基金項目:山東省大學生創新創業訓練計劃(S202210452082)
