一種改進的永磁同步電機有限集模型預測控制方案設計與實施
2023-08-01 05:50:12吳景紅
西安科技大學學報 2023年4期
吳景紅
(國能神東煤炭集團有限責任公司,陜西 榆林 719315)
0 引 言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)有著功率密度高、結(jié)構簡單等優(yōu)點,被廣泛應用于電力機車、航空航天等領域[1]。這些領域?qū)τ赑MSM的控制精度有著更高要求[2]。為了提高PMSM的控制性能,一些學者提出更高性能的控制策略,其中最受關注的是有限集模型預測控制(Finite Control Set Model Predictive Control,FCS-MPC)。
FCS-MPC通過計算代價函數(shù)獲得最優(yōu)電壓矢量從而實現(xiàn)對PMSM的控制[3]。根據(jù)控制目標的不同,代價函數(shù)中可以包含多種限制條件[4]。由于FCS-MPC方案存在依賴精確的PMSM數(shù)學模型、無法調(diào)整控制側(cè)重等問題,導致電流和轉(zhuǎn)速脈動較大、動態(tài)響應慢、開關次數(shù)高[5-7]。LIU等設計了比例積分形式的代價函數(shù)用于消除參數(shù)不匹配帶來的穩(wěn)態(tài)誤差,但是積分系數(shù)的設計需要大量試驗經(jīng)驗[8]。LI等對控制集中的電壓矢量進行擴張以提高控制精度,該策略并未降低FCS-MPC對參數(shù)依賴,還帶來了計算量大的問題[9]。
FCS-MPC方案的代價函數(shù)通常由參考電流和實際電流的偏差組成[10]。提升參考電流預測精度可以有效降低電流與轉(zhuǎn)速脈動[11]。FCS-MPC方案對下一時刻所需要的參考電流進行預測時,通常僅考慮當前時刻PMSM的實際運行狀態(tài)。灰色預測(Grey Model,GM)可以利用系統(tǒng)歷史信息進行建模,將控制系統(tǒng)中的灰色部分進行白化[12-13]。孫波等將灰色預測運用于軌道電路紅光帶現(xiàn)象的預測,起到降低相對誤差、提高預測精度的作用[14]。灰色預測與控制對象的參數(shù)無關,因此不會受到參數(shù)擾動的影響[15]。文中建立灰色預測模型,針對因參數(shù)擾動而產(chǎn)生的電流偏差進行預測,從而實時補償。
代價函數(shù)中各項權重系數(shù)的不同組合會影響系統(tǒng)的控制性能[16-18]。因此權重系數(shù)的確定對于控制效果的優(yōu)劣有著重要影響。傳統(tǒng)的FCS-MPC方案通過大量仿真與試驗確定一組最優(yōu)的固定權重因子[19]。固定的權重因子無法同時實現(xiàn)較好的動態(tài)性能與穩(wěn)態(tài)性能[20]。若不能根據(jù)電機運行工況及時調(diào)整權重系數(shù),還會導致逆變器開關次數(shù)多的問題。過高的開關次數(shù)會導致逆變器發(fā)熱嚴重、引發(fā)電流諧振。一些學者設計新的權重系數(shù)調(diào)優(yōu)方案。LIU等提出一種通過數(shù)學推導計算權重因子的方案,無需通過大量對比仿真即可尋找到最優(yōu)權重因子[21]。WANG等設計了一種粒子群尋優(yōu)算法以根據(jù)d軸和q軸電流穩(wěn)態(tài)誤差動態(tài)調(diào)整代價函數(shù)各項權重系數(shù)的控制策略[22]。這2種方案均存在計算量大的問題,不利于算法的在線實施。文中針對FCS-MPC開關次數(shù)多的問題,提出將模糊算法應用于動態(tài)調(diào)整代價函數(shù)各項權重系數(shù)的方案。
主要貢獻可總結(jié)如下:①針對FCS-MPC方案受參數(shù)擾動影響較大的問題,在其電流內(nèi)環(huán)中引入GM方案,通過分析系統(tǒng)歷史信息,獲得不受參數(shù)擾動影響的參考電流;②設計可根據(jù)PMSM運行工況動態(tài)調(diào)整代價函數(shù)各項權重的模糊控制器,形成動態(tài)代價函數(shù)以選出更符合期望的電壓矢量。
1 FCS-MPC控制方案
1.1 PMSM數(shù)學模型
PMSM是一個強耦合、多輸入的非線性系統(tǒng)。根據(jù)永磁體在轉(zhuǎn)子上安裝方式的不同,三相永磁同步電機可分為表貼式永磁同步電機和內(nèi)置式永磁同步電機。表貼式永磁同步電機多應用于高功率密度場合,選取表貼式永磁同步電機作為研究對象,其d-q坐標系下的數(shù)學模型為
(1)
(2)
式中ud,uq分別為對應的d軸、q軸電壓,V;ωe為電角速度,ωe=pωr,rad/s;ωr為轉(zhuǎn)子角速度,rad/s;p為轉(zhuǎn)子極對數(shù);ψd,ψq分別為d軸、q軸磁鏈,Wb,其中ψd=Ldid+ψf,ψq=Lqiq;ψf為永磁體磁鏈,Wb;id,iq分別為對應的d軸、q軸電流,A;R為定子電阻,Ω。文中的研究對象為表貼式永磁同步電機,因此有Ld=Lq=L,H。
運用三相兩電平逆變器為PMSM供電,拓撲結(jié)構如圖1所示。該逆變器共包含3個橋臂,分別代表ABC三相,每個橋臂上有2個開關,共有6個開關,分別定義為SAp、SBp、SCp、SAn、SBn和SCn。為避免短路,同一橋臂上的2個開關不能同時導通。用數(shù)字“1”和“0”分別代表開關的導通與關斷。這些開關狀態(tài)組成8種可能的電壓矢量,其中包含6個非零電壓矢量與2個零電壓矢量。這些電壓矢量對應的相電壓可以由式(3)計算得出

圖1 兩電平饋電的PMSMFig.1 Two level fed PMSM
uaO,i=SAp,iUdc;i=0,1,…,7
ubO,i=SBp,iUdc;i=0,1,…,7
ucO,i=SCp,iUdc;i=0,1,…,7
(3)
式中uaO,i,ubO,i,ucO,i分別為ABC三相的相電壓,V;Udc為直流母線電壓,V。當?shù)趇個電壓矢量作用于逆變器時,其輸出電壓Vi如下式
(4)

1.2 FCS-MPC方案
PAN等提出在速度環(huán)引入MPC控制器可以有效消除轉(zhuǎn)速超調(diào),研究重點集中在電流內(nèi)環(huán),因此不再詳細論述[23]。電流內(nèi)環(huán)MPC控制器根據(jù)PMSM數(shù)學模型和當前時刻的系統(tǒng)狀態(tài)可預測出下一時刻的期望電流。對定子電流的求導采用歐拉近似法可得
(5)
式中T為采樣時間,s。預測定子電流表達式如下

=F(k)x(k)+G(k)u(k)+H(k)
(6)

利用上式可分別預測出8種電壓矢量在下一時刻可能產(chǎn)生的定子電流。電流控制的目標是最小化參考電流與實際電流間的偏差。根據(jù)這一目標可以構建代價函數(shù)如下

(7)

n=|SAp(k)+SAp,i(k+1)|+|SBp(k)+
SBp,i(k+1)|+|SCp(k)+SCp,i(k+1)|
(8)
式中SAp(k),SAp,i(k+1)分別為當前時刻和下一時刻逆變器A相上半橋臂開關狀態(tài)。為了確保設備安全,設計非線性方程以限制定子電流幅值,如下式
(9)
現(xiàn)將FCS-MPC方案總結(jié)如下,該方案控制框如圖2所示。

圖2 FCS-MPC方案控制框Fig.2 Strategy control of FCS-MPC
方案1
離線階段:
2)設定模型參數(shù):母線電壓Udc、極對數(shù)p、定子電阻R、d軸與q軸電感Ld,Lq。
在線階段:
2)根據(jù)式(5)~(7)計算出8個候選電壓的代價函數(shù)值;
3)選擇代價函數(shù)值最小的候選電壓矢量作為最優(yōu)電壓矢量;
4)將最優(yōu)電壓矢量對應開關狀態(tài)輸送給逆變器。
FCS-MPC方案的控制精度依賴PMSM數(shù)學模型的參數(shù)準確性。但是在實際運行中,這些參數(shù)容易受到溫度、工況的變化而產(chǎn)生改變,從而使得 FCS-MPC方案的控制效果變差。GM方案是根據(jù)系統(tǒng)的歷史信息進行預測的,不受電機參數(shù)變化的影響。引入GM方案可有效降低電流脈動,減少參數(shù)變化對控制精度帶來的影響。
2 改進控制方案
2.1 基于灰色預測的PMSM控制方案
GM將混亂、沒有規(guī)律的歷史信息通過累加、累減等手段生成有規(guī)律的數(shù)列,對系統(tǒng)擾動進行預測并有針對性地對其補償。FCS-MPC方案確定最優(yōu)電壓矢量時僅考慮當前時刻的狀態(tài),對電機參數(shù)準確度要求較高,未對歷史信息進行充分利用。GM通過在計算參考電流時引入歷史信息,減少對PMSM數(shù)學模型的依賴,從而選擇出更準確的最優(yōu)電壓矢量,避免MPC中因為參數(shù)擾動帶來的誤差。
灰色預測模型的建立首先需要獲得一組歷史序列,如下式
(10)
式中n為所取歷史序列的長度,上標“(0)”代表未經(jīng)處理的歷史序列;ki為控制系統(tǒng)所處時刻。利用式(11)對該序列的元素進行累加并組成見式(12)的新序列,可以消除數(shù)據(jù)的隨機性和波動性。
(11)
(12)
式中 上標“(1)”代表經(jīng)過累加的序列。
白化方程組如下式所示
(13)
式中a,b為待估參數(shù)。
通過最小二乘法可得待估參數(shù)a,b滿足
(14)

解微分方程可得
(15)
(16)
根據(jù)式(16)可以得出,GM方案輸出的q軸參考電流如下
(17)
灰色預測的引入可以有效提高PMSM抗干擾能力,減少電流脈動。將代價函數(shù)中q軸參考電流改為灰色預測得到更精確的電流,代價函數(shù)可以改寫為
(18)
基于灰色預測補償?shù)目刂品桨缚煽偨Y(jié)如下。
方案2
離線階段:
2)設定模型參數(shù):母線電壓Udc、極對數(shù)p、定子電阻R、d軸與q軸電感Ld,Lq。
在線階段:
3)根據(jù)式(5),(6),(18)計算8個候選電壓的代價函數(shù)值;
4)選擇代價函數(shù)值最小的候選電壓矢量作為最優(yōu)電壓矢量;
5)將最優(yōu)電壓矢量對應開關狀態(tài)輸送給逆變器。
引入灰色預測方案對參考電流進行補償可以有效減少參數(shù)擾動引起的電流脈動。雖然解決了方案1對參數(shù)依賴的問題,但是代價函數(shù)中固定的權重系數(shù)依然無法應對永磁同步電機復雜多變的工況,導致開關次數(shù)上升。過高的開關次數(shù)會導致逆變器發(fā)熱嚴重,降低電能利用效率。但是傳統(tǒng)方案存在無法根據(jù)電機工況動態(tài)調(diào)整權重系數(shù)、權重系數(shù)的確定依賴經(jīng)驗等缺點。為了解決這些問題,設計了模糊控制器以動態(tài)調(diào)整代價函數(shù)中各項權重系數(shù)。
2.2 基于模糊的動態(tài)代價函數(shù)
代價函數(shù)中每一項都有著不同的物理意義,對其分配不同的權重會影響最優(yōu)電壓矢量的選擇,從而影響系統(tǒng)的動靜態(tài)性能。權重系數(shù)的設置要求設計者在大量試驗的基礎上綜合考慮系統(tǒng)的整體性能。固定的權重因子無法應對PMSM復雜多變的工況。為解決這一問題,設計了可以根據(jù)PMSM當前運行工況動態(tài)調(diào)整代價函數(shù)各項權重系數(shù)的模糊控制器。
模糊控制器輸入變量為轉(zhuǎn)速偏差Δω及轉(zhuǎn)速偏差變化率Δδ,輸出變量為代價函數(shù)各項權重系數(shù)Q1、Q2、Q3。轉(zhuǎn)速偏差范圍設為[-500,500],轉(zhuǎn)速偏差變化率范圍為[-5 000,5 000]。對輸入變量和輸出變量分別進行分級離散化可得,輸入變量模糊集合為{NB,NM,NS,ZE,PS,PM,PB},輸出變量模糊集合為{ZE,PS,PM,PB},模糊論域定義見表1。

表1 模糊論域Table 1 Fuzzy domains
可以將整體的調(diào)整策略總結(jié)如下:當轉(zhuǎn)速偏差和轉(zhuǎn)速偏差變化率較大時,適當減小Q3,增大Q1,Q2;當轉(zhuǎn)速波動值較大時,適當減小Q3,增大Q1,Q2;當轉(zhuǎn)速偏差和轉(zhuǎn)速偏差變化率均較小時,適當增大Q3,減小Q1,Q2。
根據(jù)上述調(diào)整策略設計的模糊推理規(guī)則詳見表2。獲取PMSM當前時刻的轉(zhuǎn)速偏差和轉(zhuǎn)速偏差變化率后即可進行權重系數(shù)的計算。根據(jù)模糊論域和模糊推理表即可設計對應的模糊控制器,實現(xiàn)對權重系數(shù)的動態(tài)調(diào)整。考慮到MPC會產(chǎn)生較大的計算量,研究選擇計算量較小的重心法解模糊來計算輸出量的精確值,其公式如下。
(19)
式中Qk為模糊控制器輸出的精確值,k=1,2,3;MΔωe,i為根據(jù)隸屬度函數(shù)計算出的Δω屬于該等級的概率,i=1,2;MΔδ1為根據(jù)隸屬度函數(shù)計算出的Δδ屬于該等級的概率,i=1,2;Fx為根據(jù)Δω和Δδ在表2中選出的權重系數(shù)可能的4個取值,x=a,b,c,d。
基于灰色預測補償和動態(tài)代價函數(shù)的PMSM控制框圖如圖3所示,該方案可以總結(jié)如下。

圖3 控制方案框Fig.3 Control strategy
方案3
離線階段:
2)設定模型參數(shù):母線電壓Udc、極對數(shù)p、定子電阻R、d軸與q軸電感Ld,Lq。
在線階段:
3)根據(jù)模糊控制器計算并更新代價函數(shù)各項權重系數(shù)Q1、Q2、Q3;
4)計算8個候選電壓的代價函數(shù)值;
5)選擇代價函數(shù)值最小的候選電壓矢量作為最優(yōu)電壓矢量;
6)將最優(yōu)電壓矢量對應開關狀態(tài)輸送給逆變器。
3 仿真與試驗
3.1 仿真結(jié)果與分析
為驗證所提方案的有效性,在Matlab中搭建仿真模型,電機仿真參數(shù)見表3。在初始時刻,電機由靜止空載啟動,設定目標轉(zhuǎn)速為500 r/min,電機穩(wěn)定運行后,在0.2 s突加2.4 N·m負載。3種方案的仿真結(jié)果如圖4~6所示,具體的數(shù)據(jù)對比見表4。

表3 仿真參數(shù)Table 3 Simulation indicators

表4 仿真結(jié)果對比Table 4 Comparison of simulation results

圖4 3種方案轉(zhuǎn)速仿真結(jié)果Fig.4 Simulation results of speed with three strategies

圖5中展示的是3種方案的A相電流波形對比。可以看到方案2中A相電流諧波含量少于方案1,方案3的A相電流諧波含量最少。方案3的電機啟動電流也比前2種方案小,在 0.005 4 s達到穩(wěn)定。當突加 2.4 N·m的負載轉(zhuǎn)矩后,三相電流能夠最快地恢復穩(wěn)定狀態(tài)。
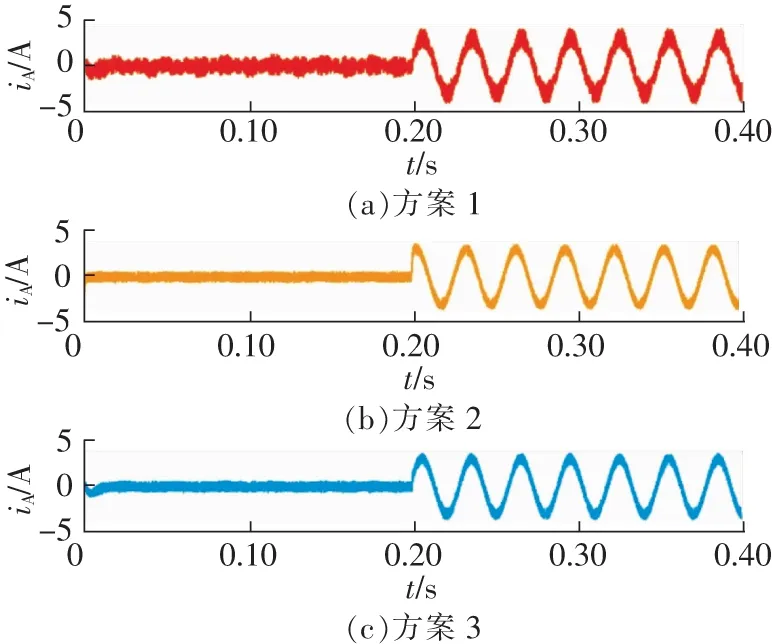
圖5 3種方案A相電流仿真結(jié)果Fig.5 Simulation results of A phase current with three strategies


圖6 3種方案q軸電流仿真結(jié)果 Fig.6 Simulation results of q axis current with three strategies
綜上所述,灰色預測補償方案可以有效降低q軸電流諧波含量,提高A相電流正弦度;引入模糊動態(tài)代價函數(shù)可以在較低開關次數(shù)的狀態(tài)下實現(xiàn)較好的電流與轉(zhuǎn)速控制效果。
3.2 試驗結(jié)果與分析
為進一步驗證所提方案的有效性,搭建了基于TMS320F28335的硬件試驗平臺,如圖7所示。試驗參數(shù)與表3保持一致。在硬件試驗平臺上分別測試3種方案的空載啟動和突加負載時的控制效果。

圖7 試驗平臺Fig.7 Experimental platform
圖8為3種方案的轉(zhuǎn)速試驗波形。從圖8可以看出,當電機空載啟動時,3種方案均不會產(chǎn)生超調(diào)。表5為試驗結(jié)果的數(shù)值對比,通過對比可得,方案2和方案3的上升時間比方案1分別減少了16.7%和38.1%。當電機平穩(wěn)運行后,利用磁粉制動器突加2.4 N·m負載。可以看到3種方案均產(chǎn)生轉(zhuǎn)速波動。相比于方案1,方案2和方案3的速度恢復時間分別縮短12.1%和48.5%。試驗結(jié)果表明與傳統(tǒng)的FCS-MPC方案相比,文中所提的2種控制方案有更好的動態(tài)響應,方案3在速度響應時間和速度恢復時間方面明顯優(yōu)于方案1和方案2。

圖8 3種方案轉(zhuǎn)速試驗結(jié)果Fig.8 Experimental results of speed with three strategies
圖9為3種方案q軸電流試驗波形對比。從圖9可以看出,在突加負載后,3種控制方案的q軸電流都能很快地達到新的穩(wěn)定值。而文中所提方案2與方案3由于采用灰色預測減小了參數(shù)擾動對控制效果的影響,所以電流波動呈現(xiàn)逐漸減小的趨勢。具體的,取0.3~0.4 s的試驗數(shù)據(jù)計算q軸電流波動可得,方案3的q軸電流脈動最小,相較于方案1和方案2分別減少了74.7%和17.6%。

圖9 3種方案q軸電流試驗結(jié)果Fig.9 Experimental results of q axis current with three strategies
對比表5中開關次數(shù)的試驗數(shù)據(jù)可得,方案3的開關次數(shù)是3種方案中最少的,相較方案1減少了16.5%。這是由于模糊動態(tài)代價函數(shù)中對開關項進行了優(yōu)化。由上述控制效果的對比可以看出,方案3對開關次數(shù)的優(yōu)化并未導致控制性能的降低。
進行試驗時,參數(shù)擾動、電能質(zhì)量等因素不可避免地會增大諧波含量,這些諧波與所提方案無關。
4 結(jié) 論
1)提出的改進FCS-MPC方案利用灰色預測算法可對系統(tǒng)中的歷史信息進行充分利用的優(yōu)點,提高了參考電流預測精度,降低了系統(tǒng)對參數(shù)的依賴;引入基于模糊的動態(tài)代價函數(shù),避免了復雜的參數(shù)調(diào)優(yōu)工作。
2)所提改進方案可選出更符合期望的電壓矢量,從而降低電流脈動。模糊控制器可根據(jù)PMSM當前工況獲取對應權重系數(shù),實現(xiàn)控制性能和開關次數(shù)間較好的平衡。
3)永磁同步電機運行工況復雜多變,工況的變化不僅會影響控制側(cè)重,而且會帶來參數(shù)擾動。所提控制方案可有效縮短系統(tǒng)動態(tài)響應時間、降低逆變器開關次數(shù)。