模值觀(guān)測(cè)IMU零偏快速標(biāo)定技術(shù)
2023-08-03 08:29:48馬國(guó)駒劉鵬嬌邢博文
兵器裝備工程學(xué)報(bào) 2023年7期
關(guān)鍵詞:方法
馬國(guó)駒,劉鵬嬌,邢博文
(中國(guó)電子科技集團(tuán)公司第五十四研究所, 石家莊 050081)
0 引言
捷聯(lián)慣性導(dǎo)航系統(tǒng)(strap-down inertial navigation system,SINS)能夠自主實(shí)時(shí)高輸出頻率地為運(yùn)載體提供包括速度、位置和姿態(tài)在內(nèi)的導(dǎo)航信息,廣泛應(yīng)用于軍事和民用領(lǐng)域[1-4]。慣組,又被稱(chēng)為慣性測(cè)量單元(inertial measurement unit,IMU),是SINS的核心慣性敏感部件,具體的由三軸正交安裝的陀螺儀和加速度計(jì)組成,慣組的誤差包括零偏、刻度因數(shù)、安裝誤差角和高階誤差項(xiàng)。由于SINS基于航位推算原理的導(dǎo)航解算方式,SINS的導(dǎo)航誤差隨時(shí)間增加而增加且主要取決于慣組的零偏[5-7]。基于六面體、分度頭或轉(zhuǎn)臺(tái)的慣組室內(nèi)標(biāo)定是確定慣組誤差和保證SINS導(dǎo)航精度的重要手段。然而,慣組內(nèi)的陀螺和加速度計(jì)特性會(huì)隨著時(shí)間和環(huán)境的變化而變化,其中,慣組零偏是變化最大的標(biāo)定參數(shù)。若在慣組使用現(xiàn)場(chǎng)沿用室內(nèi)標(biāo)定的零偏結(jié)果,將導(dǎo)致SINS導(dǎo)航精度的嚴(yán)重降低,因此,慣組零偏的現(xiàn)場(chǎng)標(biāo)定是慣組現(xiàn)場(chǎng)使用的一個(gè)重要步驟。然而,慣組零偏的現(xiàn)場(chǎng)標(biāo)定面臨著時(shí)間短和不具備室內(nèi)標(biāo)定條件的挑戰(zhàn)[8],為滿(mǎn)足外場(chǎng)試驗(yàn)對(duì)慣組零偏標(biāo)定提出的時(shí)間短、精度高的要求,需要對(duì)慣組零偏的現(xiàn)場(chǎng)快速標(biāo)定方法進(jìn)行研究。許多學(xué)者將慣組零偏標(biāo)定與SINS初始對(duì)準(zhǔn)相結(jié)合,在SINS精對(duì)準(zhǔn)階段借助轉(zhuǎn)位機(jī)構(gòu)進(jìn)行SINS轉(zhuǎn)位以實(shí)現(xiàn)慣組全零偏的完全可觀(guān)測(cè),通過(guò)濾波方法實(shí)現(xiàn)慣組全零偏的估計(jì),即基于靜基座多位置對(duì)準(zhǔn)方法的慣組零偏標(biāo)定[2,7]。然而,這類(lèi)慣組零偏估計(jì)方法需要借助轉(zhuǎn)位機(jī)構(gòu)且濾波需較長(zhǎng)時(shí)間以保證零偏收斂精度,不太適用于外場(chǎng)慣組零偏標(biāo)定時(shí)間短以及無(wú)轉(zhuǎn)位設(shè)備的背景。為此,李建利等[9]根據(jù)解析粗對(duì)準(zhǔn)原理,研究了歐拉角對(duì)慣性傳感器零偏的敏感性,分析地球自轉(zhuǎn)角速度在載體系誤差與粗對(duì)準(zhǔn)姿態(tài)間的關(guān)系,建立了任意兩位置三軸陀螺零偏標(biāo)定關(guān)系式,實(shí)現(xiàn)了慣組三軸陀螺零偏的標(biāo)定;然而該方法沒(méi)有標(biāo)定慣組三軸加速度計(jì)零偏;盧家振等[10]基于解析粗對(duì)準(zhǔn)原理分析了重力加速度計(jì)誤差與粗對(duì)準(zhǔn)姿態(tài)誤差間的關(guān)系,提出了改進(jìn)三位置慣組全零偏標(biāo)定及解析粗對(duì)準(zhǔn)算法,但需要對(duì)慣組零偏標(biāo)定位置進(jìn)行編排設(shè)計(jì)。王歲兒等[11]通過(guò)構(gòu)建解析式初對(duì)準(zhǔn)捷聯(lián)矩陣非正交、非單位化誤差與北向、天向陀螺及天向加速度計(jì)零偏關(guān)系,提出了一種三位置慣組全零偏快速標(biāo)定方法,但只對(duì)戰(zhàn)術(shù)級(jí)慣組進(jìn)行驗(yàn)證。
現(xiàn)有方法還無(wú)法很好地解決慣組零偏現(xiàn)場(chǎng)標(biāo)定中時(shí)間與精度的矛盾,模觀(guān)測(cè)標(biāo)定方法基于當(dāng)SINS處于靜態(tài)時(shí),三軸陀螺測(cè)量地球轉(zhuǎn)角速度而三軸加速度計(jì)測(cè)量當(dāng)?shù)刂亓铀俣?利用測(cè)量值的模進(jìn)行標(biāo)定,具有速度快、不需要依賴(lài)標(biāo)定設(shè)備精度的優(yōu)點(diǎn)[12]。因此,針對(duì)外場(chǎng)試驗(yàn)對(duì)慣組零偏標(biāo)定提出的時(shí)間短、精度高的要求,提出了一種基于模觀(guān)測(cè)法的慣組零偏快速標(biāo)定方法,建立慣組零偏模值觀(guān)測(cè)標(biāo)定非線(xiàn)性方程,通過(guò)最優(yōu)化非線(xiàn)性函數(shù)求解工具完成慣組零偏參數(shù)的選取得到標(biāo)定結(jié)果,通過(guò)任意三位置即可實(shí)現(xiàn)慣組6個(gè)零偏參數(shù)標(biāo)定,每個(gè)位置采集數(shù)據(jù)一分鐘,整體標(biāo)定時(shí)間3 min,具有快速標(biāo)定的突出優(yōu)勢(shì)。同時(shí),無(wú)需考慮方程求解奇異,也不需要進(jìn)行標(biāo)定位置編排,該方法同時(shí)適用于低精度和高精度慣組的零偏標(biāo)定。通過(guò)不同精度慣組的零偏標(biāo)定仿真驗(yàn)證了所提出方法的有效性,并基于提出的方法用實(shí)際低、中、高精度慣組的標(biāo)定試驗(yàn)驗(yàn)證了所提出方法的正確性和可行性。
1 基于姿態(tài)矩陣IMU零偏標(biāo)定方法

1.1 二位置陀螺零偏標(biāo)定方法

(1)


消元dφ,可得到2個(gè)IMU陀螺零偏計(jì)算方程:
1.2 三位置加速度計(jì)零偏標(biāo)定

對(duì)上面三式,消元dθ、dγ并化簡(jiǎn)整理,可得加速度計(jì)零偏標(biāo)定公式:
通過(guò)3個(gè)位置可對(duì)三軸加速度計(jì)零偏進(jìn)行求解。
1.3 二位置陀螺、三位置加速度計(jì)零偏標(biāo)定方法不足
以三位置加速度計(jì)零偏標(biāo)定為例,將其零偏標(biāo)定計(jì)算式改寫(xiě)成非齊次線(xiàn)性方程的形式如下:
Ax=B
(8)
其中A、x、B分別為
條件數(shù)是線(xiàn)性方程組Ax=B的解對(duì)B中誤差或不確定度的敏感性的度量,條件數(shù)較小的方程組解的精度較高,反之條件數(shù)越大表明方程解中誤差越大。在加速度計(jì)零偏標(biāo)定中,當(dāng)水平姿態(tài)θ、γ均為45°時(shí),A矩陣的條件數(shù)為3.6,此時(shí)加速度計(jì)零偏標(biāo)定精確;當(dāng)水平姿態(tài)θ、γ均為85°時(shí),A矩陣的條件數(shù)為12.8,此時(shí)加速度計(jì)零偏標(biāo)定含有較大的誤差;當(dāng)水平姿態(tài)θ、γ均為89°時(shí),A矩陣的條件數(shù)為56.2,此時(shí)不能得到有效的零偏標(biāo)定結(jié)果,這種零偏標(biāo)定方法不可用。此外,當(dāng)水平姿態(tài)角都為0°時(shí)無(wú)法對(duì)z軸加速度計(jì)零偏進(jìn)行標(biāo)定。因此,基于解析粗對(duì)準(zhǔn)的慣組零偏標(biāo)定方法存在著需要規(guī)劃標(biāo)定路徑、時(shí)間長(zhǎng)的問(wèn)題。
2 基于模觀(guān)測(cè)IMU零偏標(biāo)定方法
基于解析粗對(duì)準(zhǔn)慣組零偏標(biāo)定方法存在需要對(duì)SINS位置編排,且慣組零偏精度受解析粗對(duì)準(zhǔn)姿態(tài)精度的影響,最終導(dǎo)致慣組零偏標(biāo)定精度不高。當(dāng)SINS靜態(tài)時(shí),三軸陀螺儀、三軸加速計(jì)所測(cè)量的地球自轉(zhuǎn)角速度與當(dāng)?shù)刂亓铀俣葹槟V涤^(guān)測(cè),建立模值觀(guān)測(cè)標(biāo)定非線(xiàn)性方程,慣組零偏模值標(biāo)定方法減少了對(duì)SINS位置要求,且不會(huì)將解析粗對(duì)準(zhǔn)姿態(tài)誤差引入到慣組零偏標(biāo)定中。
SINS處于靜態(tài)條件時(shí),不考慮慣組的安裝誤差及標(biāo)度系數(shù)誤差,加速度計(jì)理想測(cè)量模值為當(dāng)?shù)刂亓铀俣戎?而陀螺理想測(cè)量值是地球自轉(zhuǎn)角速度值,對(duì)加速度計(jì)及陀螺的測(cè)量信息分別取模,得到:
對(duì)三軸加速度計(jì)組件:
對(duì)三軸陀螺組件:

通過(guò)增加SINS位置可以增加非線(xiàn)性方程組的個(gè)數(shù),慣組零偏標(biāo)定求解參數(shù)陀螺和加速度計(jì)均為3個(gè),即需要3個(gè)位置模值觀(guān)測(cè)就可實(shí)現(xiàn)慣組零偏的標(biāo)定,進(jìn)而也將IMU零偏標(biāo)定轉(zhuǎn)換為非線(xiàn)性方程組求解的問(wèn)題。將上式等效為如下最小損失函數(shù):
代價(jià)函數(shù)分別為
具體的方法為:將慣組3個(gè)敏感軸分別朝天1 min,采集慣組靜態(tài)三軸陀螺、加速度計(jì)數(shù)據(jù),將數(shù)據(jù)代入式(13)—(15)中,進(jìn)行遺傳算法最小值尋優(yōu)獲得零偏。具體地,目標(biāo)函數(shù)為式(13),變異參數(shù)為0.2。
3 測(cè)試結(jié)果及分析
模觀(guān)測(cè)IMU零偏標(biāo)定方法既不需要轉(zhuǎn)位機(jī)構(gòu)提供準(zhǔn)確的姿態(tài),也不需要進(jìn)行零偏標(biāo)定位置編排,且適用于低精度和高精度慣組零偏標(biāo)定。為了驗(yàn)證所提出方法的有效性及標(biāo)定精度,開(kāi)展了仿真及實(shí)際系統(tǒng)零偏標(biāo)定測(cè)試。此外,為了進(jìn)一步驗(yàn)證該零偏標(biāo)定方法的普適性,分別對(duì)低精度、中精度、高精度的3種精度等級(jí)的光學(xué)陀螺IMU零偏標(biāo)定實(shí)驗(yàn)。
3.1 仿真試驗(yàn)
模觀(guān)測(cè)慣組零偏標(biāo)定仿真從低精度到高精度SINS選擇6組不同零偏陀螺和加速度計(jì)組合,仿真設(shè)置參數(shù)如表1所示,以相同量級(jí)的加速度計(jì)、陀螺組成慣組并添加相應(yīng)的數(shù)值10%為隨機(jī)白噪聲。選SINS每個(gè)敏感大致朝上3個(gè)位置IMU測(cè)量可實(shí)現(xiàn)零偏標(biāo)定,仿真生成不同精度IMU三個(gè)位置1 min靜態(tài)數(shù)據(jù),數(shù)據(jù)更新頻率設(shè)為200 Hz。
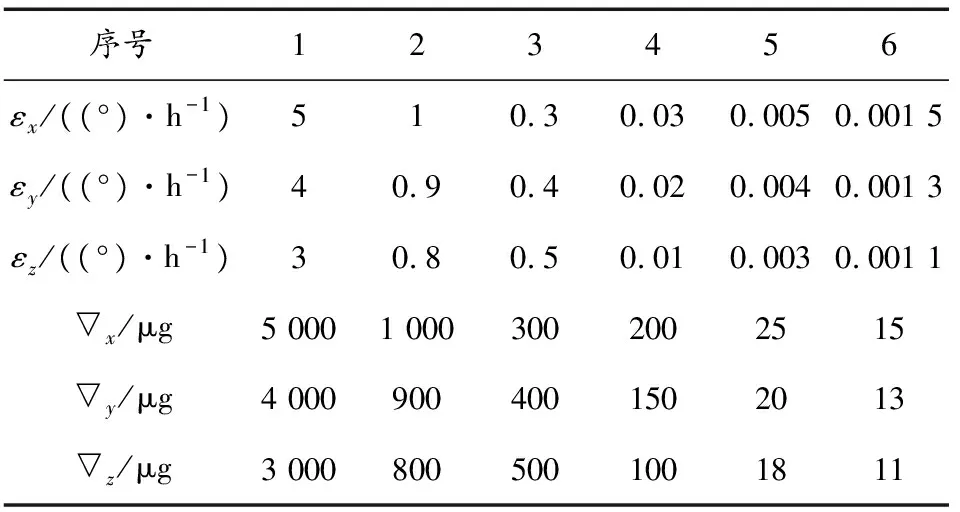
表1 仿真設(shè)置IMU零偏表
對(duì)采集的IMU三位置靜態(tài)數(shù)據(jù)采用模值觀(guān)測(cè)零偏標(biāo)定方法計(jì)算零偏。以表1中序號(hào)4仿真精度IMU為例,其IMU三軸陀螺零偏、三軸加速度計(jì)零偏迭代收斂曲線(xiàn)如圖1所示,從圖1中看出經(jīng)過(guò)15次迭代后趨于穩(wěn)定εx、εy、εz計(jì)算值分別為0.029 8(°)/h、0.021 2(°)/h、0.009 2(°)/h,而▽x、▽y、▽z計(jì)算值分別為199.2、151.4、100.6 μg,計(jì)算的IMU零偏計(jì)算與仿真設(shè)置的零偏誤差非常小,其他精度級(jí)別IMU零偏計(jì)算結(jié)果統(tǒng)計(jì)見(jiàn)表2。從表2中結(jié)果看出,表2所列出幾種不同精度IMU計(jì)算陀螺零偏誤差均小于仿真設(shè)置零偏的10%,而計(jì)算的加速度計(jì)零偏誤差均小于仿真設(shè)置的1%,基于模值觀(guān)測(cè)IMU零偏仿真標(biāo)定結(jié)果符合預(yù)期,驗(yàn)證了該方法有效性和正確性。
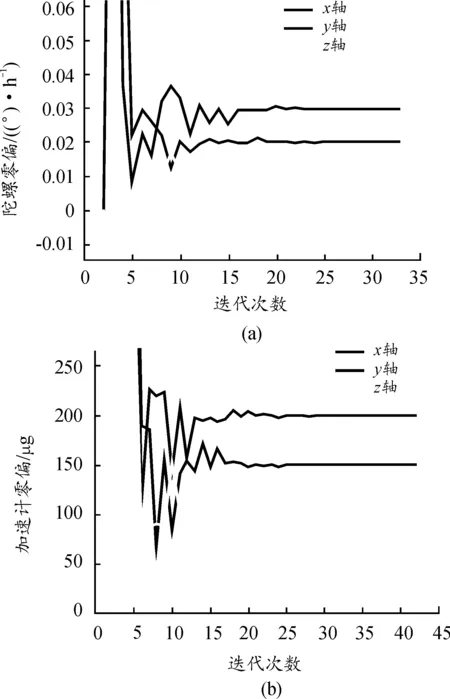
圖1 陀螺零偏、加速計(jì)零偏迭代收斂曲線(xiàn)
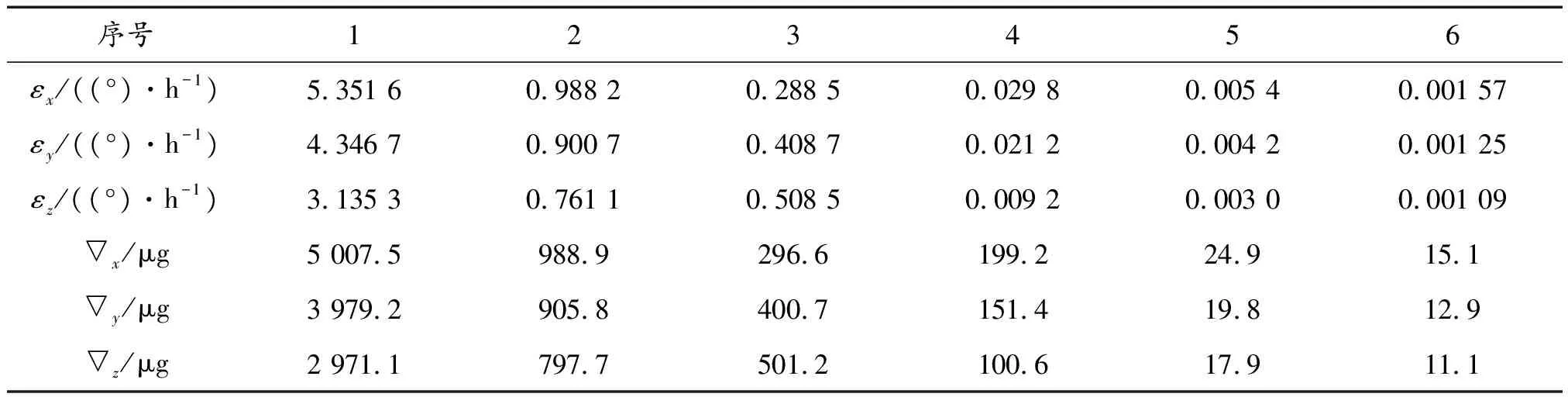
表2 仿真計(jì)算IMU零偏結(jié)果表
3.2 實(shí)際系統(tǒng)試驗(yàn)
為了進(jìn)一步驗(yàn)證所提出的標(biāo)定方法有效性,以3種不同精度等級(jí)的光學(xué)陀螺慣導(dǎo)系統(tǒng)進(jìn)行了慣組零偏標(biāo)定驗(yàn)證實(shí)驗(yàn)。圖2為戰(zhàn)術(shù)級(jí)光纖陀螺慣導(dǎo)系統(tǒng)在轉(zhuǎn)臺(tái)測(cè)試圖,陀螺零偏穩(wěn)定性約為0.5(°)/h,加速度計(jì)零偏穩(wěn)定性約為200 μg,圖3為2套激光陀螺慣導(dǎo)系統(tǒng)轉(zhuǎn)臺(tái)測(cè)試圖,其中軍綠色為50型激光陀螺慣導(dǎo)系統(tǒng),陀螺零偏穩(wěn)定性?xún)?yōu)于0.01(°)/h,加速度計(jì)零偏穩(wěn)定性?xún)?yōu)于100 μg;而淺灰色為90型激光陀螺慣導(dǎo)系統(tǒng),陀螺零偏穩(wěn)定性?xún)?yōu)于0.005(°)/h,加速度計(jì)零偏穩(wěn)定性?xún)?yōu)于50 μg。
圖2 戰(zhàn)術(shù)級(jí)光纖陀螺慣導(dǎo)系統(tǒng)轉(zhuǎn)臺(tái)測(cè)試

圖3 2臺(tái)激光陀螺慣導(dǎo)系統(tǒng)轉(zhuǎn)臺(tái)測(cè)試圖
考慮實(shí)際系統(tǒng)的真實(shí)零偏難以獲得,所以在以分立式標(biāo)定的零偏值作為參考值,慣導(dǎo)系統(tǒng)溫?zé)岱€(wěn)定工作不斷電短時(shí)間其零偏變化量可忽略不計(jì),系統(tǒng)不斷電的條件下進(jìn)行模值觀(guān)測(cè)慣組零偏標(biāo)定實(shí)驗(yàn)。轉(zhuǎn)動(dòng)轉(zhuǎn)臺(tái)使得SINS三個(gè)敏感軸分別在朝上的位置保持靜止1分鐘,數(shù)據(jù)更新率為200 Hz,對(duì)采集IMU三個(gè)靜態(tài)位置數(shù)據(jù)進(jìn)行零偏計(jì)算并將結(jié)果統(tǒng)計(jì)在表3中。

表3 三套實(shí)際系統(tǒng)計(jì)算IMU零偏結(jié)果
通過(guò)對(duì)3臺(tái)不同精度級(jí)別慣導(dǎo)系統(tǒng)模值觀(guān)測(cè)IMU零偏標(biāo)定實(shí)驗(yàn),從表3可以看出,計(jì)算值與參考值的偏差均比對(duì)應(yīng)精度的慣組精度高一個(gè)數(shù)量級(jí),即IMU零偏模標(biāo)定計(jì)算結(jié)果與參考值相差在可容許的范圍內(nèi),結(jié)合仿真及實(shí)際系統(tǒng)的IMU零偏標(biāo)定實(shí)驗(yàn),驗(yàn)證了模值觀(guān)測(cè)IMU零偏標(biāo)定方法的正確性與可行性。
4 結(jié)論
針對(duì)外場(chǎng)試驗(yàn)對(duì)慣組零偏標(biāo)定提出的時(shí)間短、精度高的要求,提出了一種基于模觀(guān)測(cè)法的慣組零偏快速標(biāo)定方法,獲得的結(jié)論如下:
1) 所提出的基于模觀(guān)測(cè)法的慣組零偏快速標(biāo)定方法基于慣組三軸測(cè)量信息模值,通過(guò)將慣組3個(gè)敏感軸分別大致朝上3個(gè)位置,實(shí)現(xiàn)慣組所有零偏的解耦求解,完成慣組零偏標(biāo)定。
2) 整個(gè)慣組零偏標(biāo)定僅需約3 min,而且不用借助轉(zhuǎn)位機(jī)構(gòu),僅需讓每個(gè)敏感軸大致朝上保持靜態(tài)1 min,適用于外場(chǎng)慣組零偏快速標(biāo)定。
3) 利用仿真和試驗(yàn)驗(yàn)證了所提出方法的有效性,計(jì)算值與參考值的偏差均比對(duì)應(yīng)精度的慣組精度高一個(gè)數(shù)量級(jí),即慣組零偏模標(biāo)定計(jì)算結(jié)果與參考值相差在可容許的范圍內(nèi)。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫(huà)報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56