BIM 技術引入對建筑腳手架不安全行為識別的研究
2023-08-10 04:29:24馬昊源潘永剛
中國建設信息化 2023年14期
馬昊源 潘永剛
(新疆大學)
腳手架被大量應用于建筑工程的各個階段,無論是基坑開挖、主體修建還是裝飾裝修都有腳手架的使用,建筑腳手架安全是建筑工程中必須重視的問題,通過對國家應急管理部網站、各省市自治區生產監管部門網站及其他相關網站收集到的數百起腳手架安全事故報告進行統計分析,可知,腳手架不安全行為主要引發高空墜落、物體打擊和架體失穩三種安全事故,其所占比例已超總事故數的66.5%,而腳手架安全事故主要引發腳手架損壞、傷人、損毀等問題,因此快速準確識別腳手架存在的不安全行為是迫切的。腳手架主要分為扣件式腳手架、門市鋼管腳手架、碗扣式腳手架、盤扣式腳手架以及鋁合金腳手架,使用過程分為搭設、使用和拆除三個階段,在三個階段中影響腳手架安全因素主要有人、環境、工藝和管理四個方面,通過合理、便利的管理方式能夠降低人、環境和工藝帶來的不良影響。目前關于腳手架安全管理的研究主要有,吳必龍[1]從腳手架構造研究與標準化設計上對腳手架安全性進行了論證。Wu 等[2]提出了基于 RFID 技術的自組織實時追蹤系統的框架,用于對潛在安全事故的分析與預警。Pisheh[3]通過對腳手架坍塌原因的分析,運用信息科技提高腳手架現場的安全性。Zhang[4]等提出在 BIM 模型的基礎上自動分析檢查安全隱患并完成防護措施設置。郭紅領等[5]針對作業人員的不安全行為,提出 BIM 和 PT 技術結合的不安全行為預警系統,通過獲取、處理和反饋工人位置和行為信息,實現現場事故的預防。趙江平等[6]基于圖像識別技術對作業人員在有限空間中作業發生的跌倒事故進行識別。張偉勝[7]探索了基于規范標準的安全規則的價值,在設計-安全理論的支持下,集成 BIM技術自動識別設計不安全因素。
基于以上分析,本文通過調研分析腳手架搭設、使用、拆除時的安全現狀,針對出現的不同安全影響因素通過構建BIM 仿真模型對其存在的不安全行為進行識別預警,并提供相應的措施建議,以達到降低安全事故、減少經濟損失、提高施工效率的作用。
1.腳手架不安全行為現狀與問題
1.1 不安全行為現狀分析
腳手架中的不安全行為可能會引發安全事故的發生,通過文獻分析、專家訪談及問卷調查的方式發現現階段腳手架中不安全行為主要分為人的不安全行為和由物不安全狀態引發的不安全行為。本文將通過采集人和物的實時數據與仿真BIM 模型比對識別,并對識別的人和物所引發的不安全行為進行分析研究。
1.1.1 人的不安全行為
建筑工程由不同工種的工人通力合作共同完成,在建筑腳手架工程中,人全程參與到腳手架的搭設、使用和拆除過程中,人的因素將是腳手架工程中必須考慮的重要因素之一。在腳手架全生命周期內存在安全區和非安全區(即施工區域),當腳手架處于搭設和拆除階段時,無關人員未經允許進入非安全區(即施工區域)時將可能發生安全事故,如物體打擊、高空墜落等問題;當施工人員進入非安全區(即施工區域)時未按規定使用安全措施,如佩戴安全帽、懸掛安全繩等;施工人員在非安全區域活動時易發生高空墜落的風險;施工人員違規操作,如搭設不規范、地基處理不當等。以上因人的不安全行為都可能引發安全事故,造成人員傷亡和經濟損失。
1.1.2 物引發的不安全行為
在腳手架工程中物引發的不安全行為往往可能引發影響更大的安全事故。物的不安全行為主要指人不易發現和察覺的安全隱患,當物已存在安全隱患時還被認為處于安全狀態,并繼續正常使用,最終引發安全事故,造成人員傷亡和經濟損失。通過調研分析,物所引發的不安全行為主要有以下問題。
(1)架體失穩。腳手架在使用過程中受到不同大小和不同方向的荷載作用,如風荷載、永久荷載和施工荷載等。在不同時間段內不同荷載作用于架體可能導致架體偏移,造成架體失穩問題,最終導致腳手架坍塌。如受到風荷載造成架體整體偏移或局部偏移,但因為偏移程度不易通過肉眼發現,架體長時間使用將導致架體整體倒塌,造成人員傷亡。
(2)荷載超標。在腳手架使用過程中架體上堆積的物體和人員的重量超出腳手架規定的允許荷載值。在《建筑施工扣件式鋼管腳手架安全技術規范》JGJ-130-2011 中對不同結構腳手架的荷載承受值有相關的設計要求。在腳手架的實際使用中施工人員往往忽視腳手架架體所能承受的最大荷載值,肆意的使用腳手架,堆積各種材料和雜物,隨意的在架體上行走和施工,最終可能導致其所承受荷載值遠遠超過腳手架允許的最大荷載,從而引發腳手架的整體倒塌,造成人員的損失和物資的損失。
(3)部件損壞。腳手架搭設、使用和拆除時,腳手架的固定點是保證腳手架整體穩定性的有利保障。但在腳手架工程中腳手架固定點狀態識別監測是比較困難的,施工管理人員無法時刻監督固定點的狀態,導致不能實時了解固定點的受力情況,保證架體的穩定性,引發腳手架桿件斷裂,固定點松動等問題,造成工期拖延、人和物的損失。
1.2 腳手架安全狀態實時判別難
在建筑工地中腳手架安全狀態的判別主要通過為人工判別的方式進行判斷,但判別時間往往是階段式的,只有在特定的時間內才會對腳手架的安全狀態進行檢查。人的不安全行為和物所引發的不安全行為不能夠達到實時識別和實時預警功能。以上不安全行為問題的識別發現和問題解決都主要依賴于人,而人是施工作業中的最不可控因素之一,因此,只有盡量減少人的影響才能確保安全狀態的正常識別和預警,引入BIM 技術識別建筑腳手架工程安全狀態是有必要的,能夠有效減少不可控因素的影響,最大限度的保證建筑腳手架的安全狀態。
1.3 腳手架安全識別預警難
建筑腳手架的安全問題十分重要,如何避免腳手架安全事故是安全管理的重中之重,但目前腳手架安全識別在建筑工程中沒有系統性的識別預警機制,建立覆蓋建筑腳手架全生命周期及系統性的識別預警機制是解決這一問題的關鍵。在腳手架的全過程中沒有統一的識別標準對腳手架工程中人和物所引發的不安全行為進行識別預警,建立標準化的虛擬仿真腳手架BIM 模型作為識別基礎,能夠起到快速識別的作用,避免腳手架安全事故的發生。
綜上所述,為解決建筑腳手架全過程的安全問題,應減少人為因素的影響,并對腳手架工程進行安全狀態實時識別監測。一是要準確分析收集腳手架工程不安全行為影響因素;二是準確識別不安全行為因素;三是及時提供識別預警和補救措施。
2.腳手架工程不安全行為識別
2.1 仿真模擬識別系統的構建
仿真模型識別系統將基于BIM 技術搭建仿真模型,實現仿真模型數據化、可視化和模擬化,利用仿真模型與實際數據進行比對識別,仿真模擬系統將分為數據采集、數據識別、比對分析和預警方案四部分,仿真模擬識別系統如圖1所示。
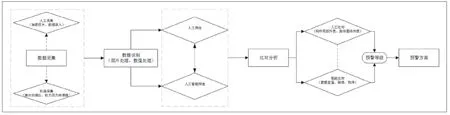
圖1 仿真模擬識別系統
(1)數據采集。腳手架工程中人和物實際狀態的記錄是極其重要的,通過人工采集和機器采集兩種方式采集腳手架工程現場人和物的具體情況,以此作為與仿真模型比對的基礎數據。如通過手持設備拍照記錄腳手架結構和構件外表狀況;通過定位器記錄人員軌跡和所出區域;通過激光掃描儀掃描架體的整體結構;通過拉力、壓力傳感器記錄固定點受力情況等;通過人工和機器相結合的方式,保證腳手架工程區域內人和物數據的連續性,確保采集的數據具有準確性和實時性,為仿真模擬識別系統提供有利的數據支持。
(2)數據識別。將采集到的數據進行處理分析以達到能與仿真BIM 模型進行比對的目的。如利用人工篩選處理的方式剔除模糊不清和拍攝不完整的圖片,保證拍攝圖片的完整性和有效性;利用人工智能篩選識別腳手架各對應位置記錄的數值情況,并對數值進行統計分析和預測;利用人工與人工智能相結合的方式處理收集到的復雜數據,將圖片和數值數據化,便于與仿真BIM 模型進行比對。確保腳手架工程現場實時情況在第一時間進行處理和傳輸,能夠準確有效及時的與虛擬仿真模型進行比對識別,以此達到對建筑腳手架工程不安全行為的識別預警。
(3)比對分析。以腳手架工程虛擬仿真BIM 模型為參照,將引發不同危險類型相關數據與虛擬仿真模型進行人工或人工智能算法比對識別,如數值比對識別、外形外貌識別等,最終形成不同等級的提示預警,提供對應等級的提示預警,避免不安全行為發生,預防安全事故。
(4)預警及方案提供。主要包括不安全行為識別預警和方案提供兩個功能,以終端和平臺預警的方式進行提示預警和方案提供,在預警的同時提供解決方案以供施工管理人員選擇。預警將安全等級分為綠色預警(D1)、黃色預警(D2)和紅色預警(D3),綠色預警表示腳手架為安全狀態符合使用規定;黃色預警表示腳手架存在安全隱患,需檢修后使用;紅色預警表示架體危險需立即檢修或拆除。
2.2 不安全行為比對識別
在建筑腳手架搭設前,通過腳手架的高度、跨度等具體數據利用Revit 對腳手架的結構進行BIM 模型模擬搭設,形成立體可視的標準腳手架仿真BIM 模型。對建筑腳手架中不安全行為的識別,將利用實際數據加入人工或算法識別,得出結果再與仿真BIM 模型進行比對分析,能夠一定程度識別出腳手架工程中人的不安全行為和物所引發的不安全行為,從而減少建筑腳手架工程中不安全行為的發生,避免發生安全事故,起到提前預警的作用,具體比對識別流程如圖2 所示。
2.2.1 人員識別
建筑工地人員眾多,安全環境復雜,往往不能實時掌握施工現場的具體情況,通常只能通過人工巡檢的方式進行檢查識別,容易出現識別不及時和檢查不全面的情況。通過在虛擬仿真模型中劃分安全區與非安全區,設立電子圍欄,按危險程度不同利用紅色、黃色和綠色在模型中表示不同的區域,與預警提示等級的顏色相對應,形成可視化的仿真BIM 模型。利用傳感設備(如電子身份標識、定位裝置等)和高清攝像機實時記錄施工人員的具體位置,通過圖像算法識別出非正常許可進入危險區的人員,并在仿真BIM 模型中進行標注,當標注位置位于黃色和紅色區域時,識別系統通過手持終端(如手機、平板等)進行提示預警,及時提醒施工人員注意安全,使管理人員及時掌握施工作業人員所處的施工環境安全狀態,使其能夠及時做出相應調整,保障施工作業人員時刻處于安全環境中。
2.2.2 架體識別
(1)架體失穩。確保腳手架的整體穩定是避免腳手架發生坍塌事故的有利保證,利用BIM 技術建立的仿真模型是腳手架穩定性的最優狀態。第一,通過利用激光掃描儀將按標準建成后的腳手架立桿、橫桿和整體進行定位掃描,通過掃描得到的立桿橫桿位置圖及腳手架整體結構圖與腳手架標準仿真BIM 模型中相應位置進行一一比對,如圖3 和圖4 為腳手架局部和整體仿真BIM 模型,通過與仿真BIM模型比對得出各個立桿、橫桿的位移偏差數值和架體的整體偏移值。第二,通過人工拍照和安裝拉力、壓力傳感器的方式,分別作為腳手架固定點構件外表記錄和固定點內部受力情況記錄,將記錄到的實際信息與腳手架仿真BIM 模型對應固定點處的預設標準值進行比對。收集數據的同時在仿真BIM 模擬中針對不同位置預設不同的允許偏差數值,以不同數值的偏差數據作為安全等級的劃分標準,以此將腳手架的安全狀態分為不同等級進行預警(如綠色預警(D1)、黃色預警(D2)和紅色預警(D3))進行預警提示,針對不同的預警等級提供相應的對策建議,從而避免因腳手架失穩所引發的不安全行為發生,減少安全事故發生概率。

圖3 腳手架局部BIM模型
(2)構件損壞。腳手架仿真模型能夠形象的展示出各桿件及連接構建的具體標準模型,通過人工利用手持終端(如手機、平板等)對腳手架各個構件進行拍攝記錄,將拍攝記錄的實際腳手架構件與仿真BIM 模型構件庫中對應的構件,進行形態改變、是否開裂、是否銹蝕和結構是否完整等細節比對,來鑒定構件的完整性、損壞程度和桿件非正常連接方式等,如圖5 所示為比對腳手架仿真BIM 模型中架體搭設完整性,比對發現實際腳手架缺少掃地桿,可能影響架體穩定性。因此可以通過實際情況與虛擬仿真模型比對識別腳手架中的安全隱患,按易引發安全事故的大小,將腳手架不安全行為分為不同安全等級進行提示預警,能夠起到對腳手架部構件的安全識別作用,避免因腳手架構架損壞或缺失引起的腳手架坍塌安全事故。

圖5 腳手架固定點BIM模型與架體實拍
(3)荷載識別。腳手架工程的允許荷載是按照實際工程情況和現場所需計算后得出的,腳手架的允許荷載應滿足《建筑施工扣件式鋼管腳手架安全技術規范》JGJ-130-2011中的相關規定。通過在腳手架立桿底座和跨度較大橫桿中段安裝荷載感應裝置(如壓力應片等)記錄腳手架受力情況,同時在腳手架標準仿真BIM 模型中相應構件和桿件處設置預設允許荷載數值等屬性信息,通過比對采集數值和預設數值兩組數據的大小,區分偏差值大小來識別架體的安全狀態。將允許偏差數值大小按不同等級進行劃分,即綠色預警(D1)、黃色預警(D2)和紅色預警(D3),進行預警提示和措施建議提供,避免因荷載過大導致架體失穩坍塌,引發安全事故。
2.3 不安全行為比對識別的應用場景
引入BIM 技術建立的腳手架不安全行為比對識別能及時有效的識別腳手架中人的不安全行為和物的不安全狀態,減少腳手架安全事故發生的概率。本研究可應用于腳手架搭設、使用和拆除全過程,識別腳手架局部和整體的實時狀態,通過仿真BIM 模型可視化展示腳手架安全隱患和具體位置,為安全管理人員及時提供腳手架數據信息,便于查找腳手架安全隱患并進行整改,避免安全事故發生。
3.結論
目前,針對建筑腳手架不安全行為的研究較少,將BIM技術引入建筑腳手架不安全行為識別中能夠一定程度解決人和物所引發的安全問題。本文通過專家訪談、文獻閱讀和問卷調查的方式收集分析建筑腳手架中的主要不安全行為和影響不安全行為的重要因素,通過人工采集和機器采集的方式實時、不間斷采集建筑腳手架局部和整體的外部狀態數據及內部受力數據,利用采集到的實時實際數據與腳手架標準模型預設值數據進行具體比對,從而識別出腳手架工程中的安全隱患和問題,最終識別出腳手架工程全周期內人和物所引發的不安全行為,提前避免安全事故的發生。以Revit 建立的仿真BIM 模型能夠及時、準確比對識別出建筑腳手架中出現的不安全行為,減少腳手架中安全事故的發生,對BIM 技術今后的推廣使用具有一定意義。今后,應進一步完善腳手架標準數據庫的建設和數據庫與仿真模型的交互功能實施,助力改善建筑腳手架的安全隱患問題,減少因建筑腳手架不安全行為引發的安全事故和人員的傷亡。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2022年10期)2022-07-28 03:04:16
建材發展導向(2021年20期)2021-11-20 05:43:16
建材發展導向(2021年6期)2021-06-09 05:57:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
新課程研究(2016年2期)2016-12-01 05:53:17
光學精密工程(2016年6期)2016-11-07 09:07:19
太空探索(2016年6期)2016-07-10 12:09:06
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
