隧道磁共振旋轉探測二維成像方法
2023-08-12 07:25:44梁文婧徐奡澍
隧道建設(中英文) 2023年7期
刁 庶, 梁文婧, 徐奡澍
(1. 無錫職業技術學院控制技術學院, 江蘇 無錫 214121; 2. 吉林大學儀器科學與電氣工程學院, 吉林 長春 130061; 3. 重慶電子工程職業學院, 重慶 401331)
0 引言
磁共振探測技術是一種能夠直接定量探測地下水的地球物理方法[1]。與其他隧道超前探測技術相比,其具有直接、分辨率高等特點[2-5]。由于該方法能夠快速準確地定位水源位置和評估水量大小,近年來被廣泛應用于水資源勘探、水文環境監測以及地下工程水害預警等領域。
隨著磁共振探測技術在一維空間數據解釋研究方面的日趨穩定,2005年,Braun等[6]第1次引入了二維核函數的概念,得到了二維磁共振探測結果,分辨率良好,為后續二維反演方案的擬定提供了理論基礎。隨后,Hertrich等[7]研究了一種快速二維磁共振成像反演方法,并通過試驗數據驗證了該方法的有效性,仿真結果表明該方法能夠準確還原原始模型的重要特征。林君等[8]提出了基于優化Block反演的地面磁共振成像方法,反演結果滿足精度和穩定性要求。林婷婷等[9]引入橫向約束反演思想,提高了磁共振解釋結果的準確性,加強了剖面地質結構和含水模型探測的連續性。Jiang等[10]研究了一種基于QT反演方法的磁共振層析數據二維成像技術,通過分辨率分析可知,使用復雜層析數據不僅可以提高分辨率,還可以增加穿透深度,且得出了該方法對不斷增加的噪聲條件不太敏感的結論。進一步,蔣川東[11]采用初始振幅反演方法對德國Einersberge湖進行了三維地下水成像和含水量估計,完成了三維高精度成像。Legchenko等[12]、Vincent等[13]對法國阿爾卑斯山脈魯塞冰川的溶洞進行了三維磁共振成像,并通過20個鉆孔數據對探測結果進行了驗證。Costabel等[14]利用磁共振含水率和弛豫時間的巖性指標,識別出薄含水層、細砂土含水層和粗砂土含水層,利用磁共振技術估算的巖性信息補充了現有的鉆孔數據,極大地改善了Langeoog島的水文地質模型成像精度。由以上文獻可知,地面磁共振探測數據反演方法已經可以對三維數據進行解釋,并向高分辨率、高精細方向發展。
針對地下探測工程中的磁共振數據解釋,顧漢明等[15]提出了通過增加隧道探測天線匝數來提高信號強度進而提高反演效果的方法;Girard等[16]研究了礦井下磁共振探測突水,并進行了正演計算,得出未獲得磁共振信號難以對含水體成像的結論;林君等[17]深入研究了地下水超前探測理論、準全空間模型建立與反演方法,實現了對隧道工程和煤礦開采等地下狹窄空間極端環境的探測;Lin等[18]初步開展了地下磁共振探測準全空間的一維正反演解釋;林君等[19]在地面磁共振探測理論的基礎上,建立地下全空間模型,推導直立線圈的磁共振響應信號表達式,可以獲得一維成像結果;Diao等[20]提出了基于2 m探測線圈扇形掃描形式的磁共振旋轉探測方法,能夠獲得二維成像結果。
上述反演解釋方法已在地面工程的應用中取得了較好的效果,可以實現三維空間成像,能夠觀測到分辨率清晰的含水體。然而,地下工程中的磁共振信號,由于受探測空間復雜、地下水文地質環境及場效性等影響較大,其反演解釋方法目前還停留在一維空間。本文利用磁共振旋轉探測方法對隧道空間非層狀水的二維分布情況展開研究,針對一維成像無法定位和定量評估的問題,提出基于復包絡反演的旋轉探測二維成像方法,建立隧道空間二維反演目標函數。通過引入吉洪諾夫正則化因子和平滑約束條件,提高反演結果的穩定性和分辨率,解決一維探測方法探測盲區的問題,在掌子面附近的左右側壁及頂板、底板位置分別獲得溶洞及含水通道的含水量與弛豫時間高精度二維成像結果。
1 隧道磁共振旋轉探測系統

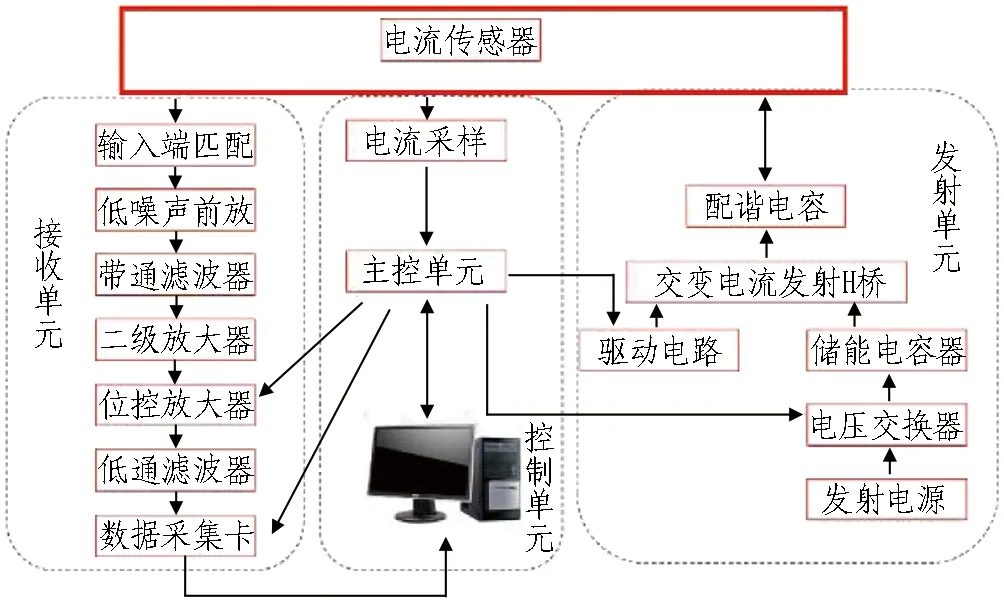
圖1 隧道超前探測儀系統結構框圖Fig. 1 Tunnel detection instrument system
2 隧道磁共振復包絡二維反演方法
復包絡反演方法是由Müller-Petke等[21]提出的,該方法使用1組脈沖矩完整的磁共振信號進行反演解釋,能夠得到含水量、平均弛豫時間隨深度的變化情況。由于其將全部的測量包絡數據一次性代入反演計算中,避免了重復計算帶來的誤差,從而提高了反演精度,優于目前常用的方法。


(1)
式中:q為激發脈沖矩;t為感應信號接收時間;K(q,r)為核函數;r為地下某一空間位置;w(r)為地下體積單元d3r的含水量。
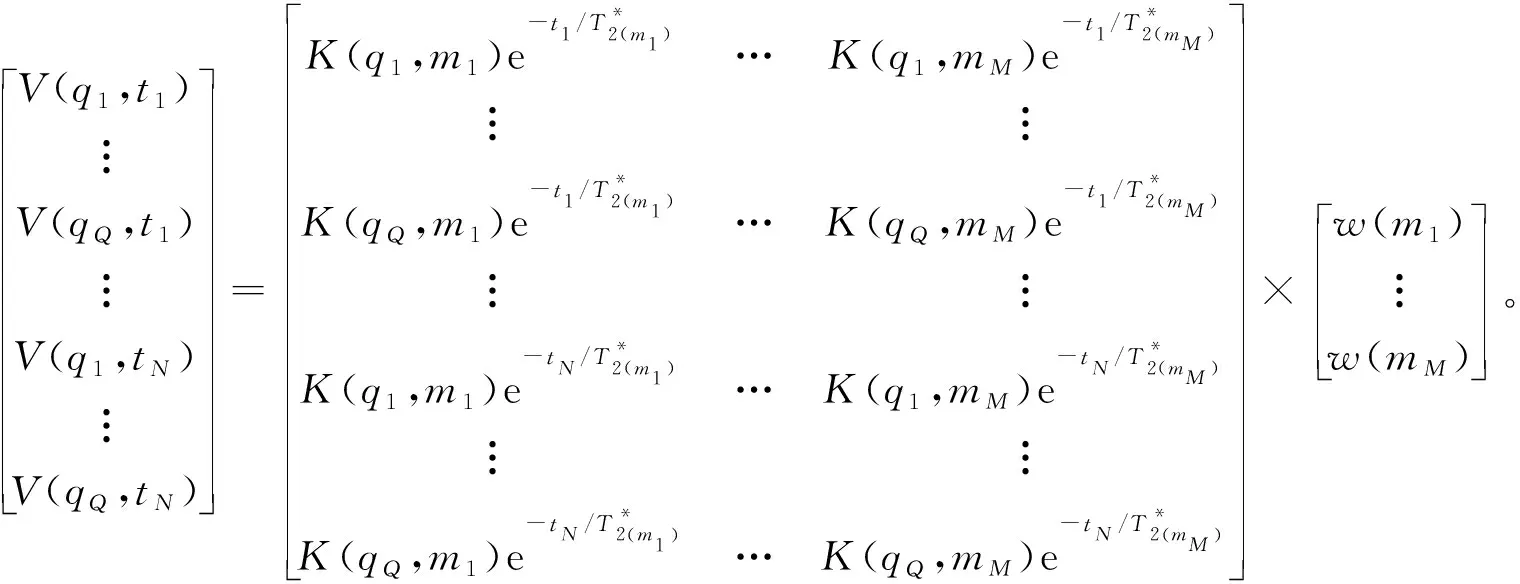
(2)
式中:Q為脈沖矩個數;N為抽道數;mi(i=1,2,3,…,M)為地下剖分單元,M為剖分單元個數。
式(2)可用于推導二維反演的雅克比轉換矩陣。針對同一目標體不同脈沖矩及探測角度獲取的信號同時進行復包絡反演,可以提高反演二維成像結果的分辨率,提高目標體邊界清晰度。旋轉天線反演的目標函數為

(3)

設平滑度矩陣C的單元邊界是b,rb為權重因子,根據文獻[25]可知其計算公式如式(4)所示。
rb=I+(rz-1)nb·ez。
(4)
式中:nb為模型平滑度矩陣C的單元邊界b的法向向量;ez為z方向的單位向量;rz為含水模型權值,其值限制在[0,1];I為單位矩陣。
則具有約束條件目標函數的最優解即含水量的解,利用高斯牛頓迭代方程求解正則化標準方程,可以得到
(JTDTDJ+λCTC)Δwk=JTDTD(V-K·wk)-λCTCwk。
(5)
式中:J為雅克比矩陣;C=[1,-1];k為當前的迭代次數;wk為當前迭代次數下的含水量值; Δwk為第k次迭代時含水量的增加值;V為接收天線中弛豫信號的感應電動勢V(q,t)的矩陣形式;K為核函數的矩陣形式。
3 模型仿真與反演結果
3.1 模型建立與仿真
建立的探測模型如圖2所示。在右側壁上,距離中心位置5 m處有一含水通道模型,尺寸為4 m×4 m,含水量為50%(如圖2(a)所示),弛豫時間為0.5 s(如圖2(c)所示);左側壁無含水構造;在頂板上方和底板下方,距離中心位置5 m處分別存在橢圓形溶洞,溶洞內的含水量為50%(如圖2(b)所示),弛豫時間為0.5 s(如圖2(d)所示),外部為無水區。設定仿真數據的噪聲水平為100 nV,脈沖矩為0.04~4 As。
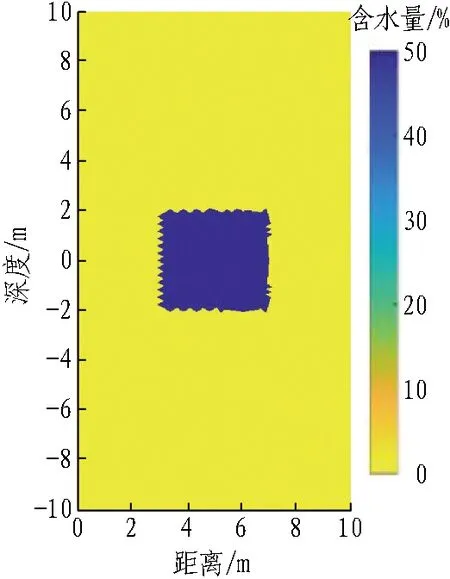
(a) 右側壁含水通道含水量模型
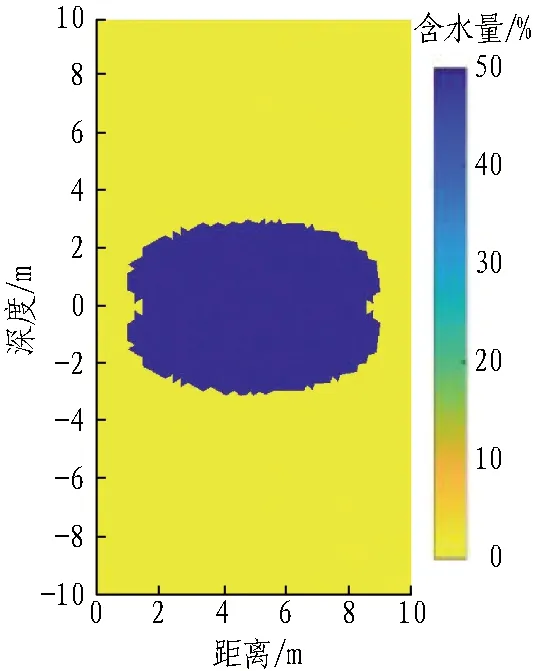
(b) 頂板、底板溶洞含水量模型
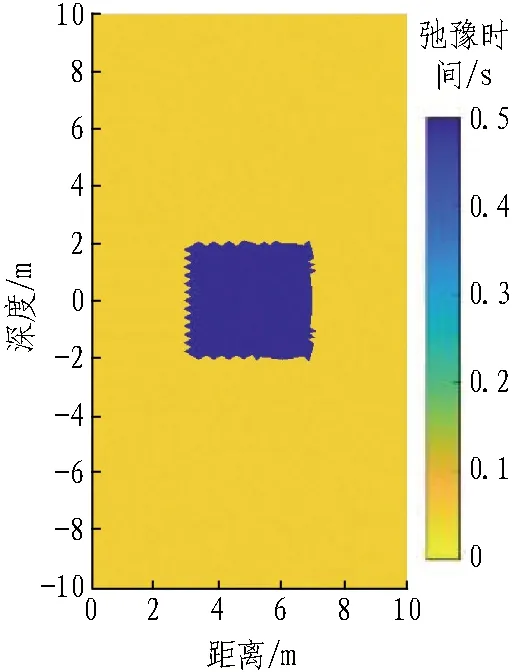
(c) 右側壁含水通道弛豫時間模型

(d) 頂板、底板溶洞弛豫時間模型圖2 隧道全空間旋轉探測水害隱患含水量及弛豫時間正演模型Fig. 2 Forward modeling of water content and relaxation time for tunnel full-space rotation detection of water hazards
旋轉探測隧道全空間示意如圖3所示。首先,使探測線圈平面平行于掌子面,對掌子面前方含水體進行仿真(如圖3(a)所示),旋轉天線以水平方向x軸為旋轉軸,繞z方向每隔22.5°逆時針旋轉1次,共旋轉8次,旋轉180°,即可完成對掌子面前方含水體的探測。然后,將旋轉天線水平移動至左側壁,對左側壁含水體進行仿真(如圖3(b)所示),探測天線以水平方向y軸為旋轉軸,繞z方向每隔22.5°逆時針旋轉1次,共旋轉8次,即可完成對左側壁含水體的探測;同理,移動天線至右側壁,即可完成對右側壁含水體的探測。最后,將探測天線平行于地面,探測天線以水平方向z軸為旋轉軸,繞y方向每隔22.5°逆時針旋轉1次,共旋轉8次,即可完成對隧道頂板含水體的探測;同理,反方向即可完成對底板含水體的探測。
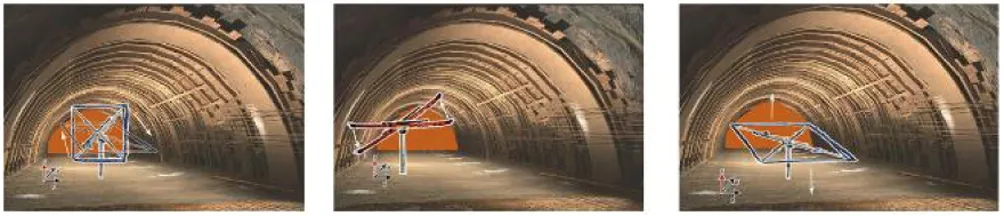
(a) 掌子面(b) 側壁(c) 頂板及底板圖3 旋轉探測隧道全空間示意圖Fig. 3 Tunnel full-space schematic of rotation detection
3.2 反演結果與分析
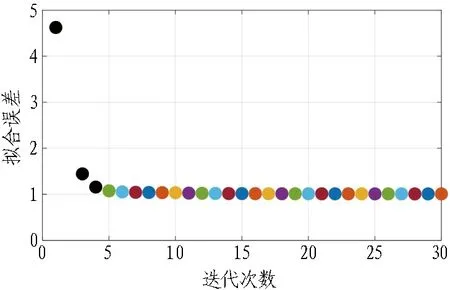
(a) 觀測數據集合
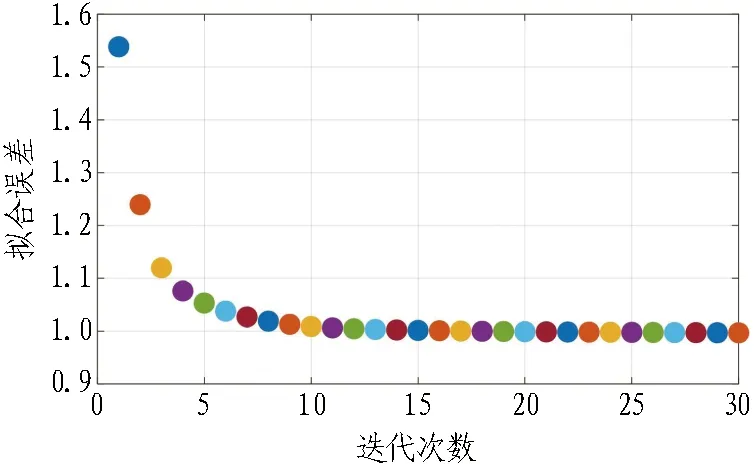
(b) 噪聲水平加權的觀測數據與計算數據不吻合度圖4 觀測數據結果Fig. 4 Analysis of observational data results
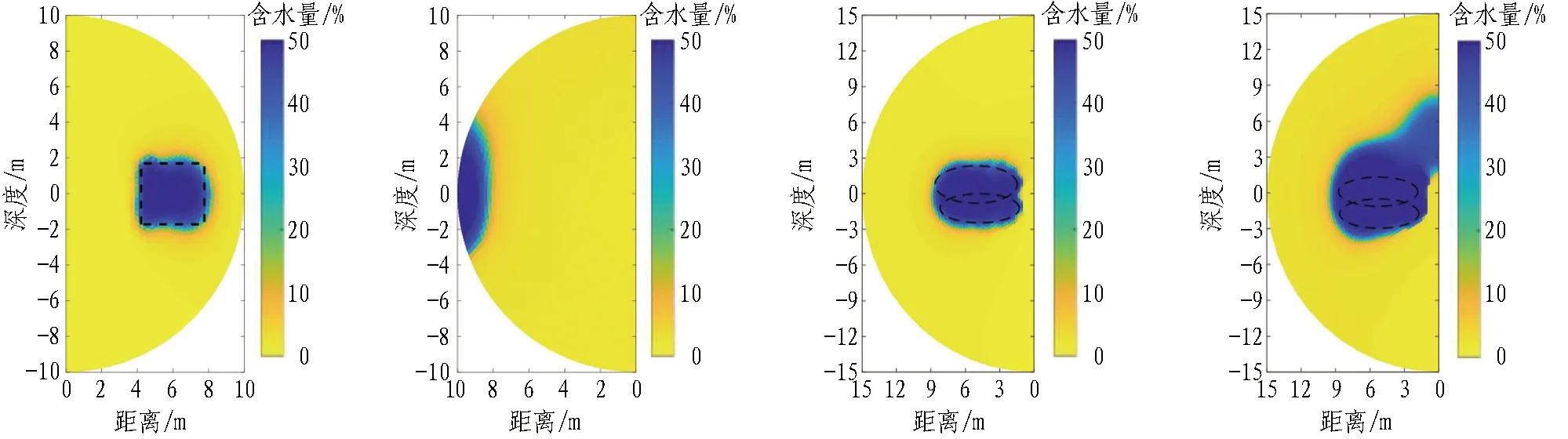
(a) 右側壁含水通道含水量模型(b) 左側壁含水量模型(c) 頂板溶洞含水量模型(d) 底板溶洞含水量模型
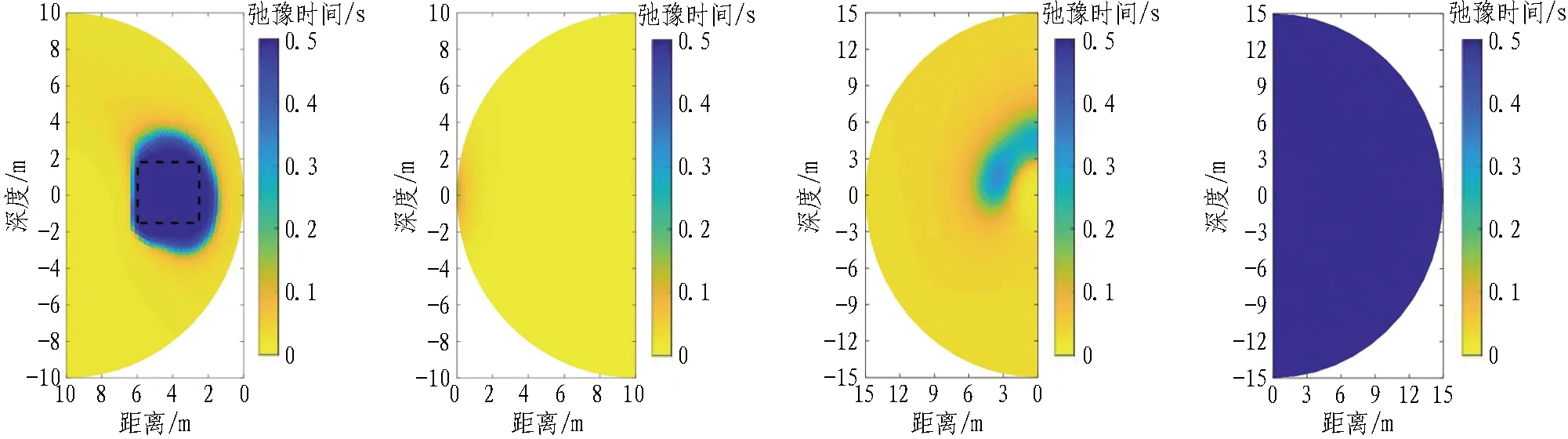
(e) 右側壁含水通道弛豫時間模型(f) 左側壁弛豫時間(g) 頂板溶洞弛豫時間模型(h) 底板溶洞弛豫時間模型圖5 隧道全空間旋轉探測水害隱患含水量及弛豫時間分布情況Fig. 5 Distribution of water content and relaxation time for tunnel full-space rotation detection of water hazard hazards

4 結論與建議
本文采用磁共振旋轉探測方法對隧道水害隱患進行準確定位及二維高精度成像,并建立了隧道空間二維反演目標函數,最后對隧道3種水害隱患模型進行了驗證,得到的主要結論如下:
1)針對一維成像難以定位和定量評估的問題,提出基于復包絡反演的旋轉探測二維成像方法,通過引入吉洪諾夫正則化因子和平滑約束條件,提高了反演結果的穩定性和分辨率。
2)針對隧道空間狹小無法移動探測線圈的問題,設計了旋轉探測系統,通過分析采集數據中的地下磁共振信號,定量估計目標水體的位置、含水量大小、弛豫時間、含水體所賦存的結構等水文地質信息。
3)采用磁共振旋轉探測技術在隧道超前探測中進行了模擬試驗,利用復包絡反演方法實現了隧道水害隱患的二維高精度成像,分別得到了右側壁上距離中心位置5 m處、頂板上方距離中心位置5 m處和底板下方距離中心位置5 m處存在含水結構的結果,實現了溶洞、含水通道的水害隱患高精度二維含水體重構。
下一步,建議通過改進隧道磁共振二維正演計算方法,提高反演計算效率,實現隧道水害隱患現場的快速成像。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56