
3 000 t全回轉起重船動力定位能力分析
2023-08-18 05:36:22周喜寧褚繼壯彭方華
船海工程 2023年4期
周喜寧,褚繼壯,彭方華
(招商局重工(江蘇)有限公司,江蘇 南通 226000)
目前,市場上的風電安裝船一般配備動力定位系統,使安裝船可以在風場內完成快速遷移,定位,提高工作效率。動力定位系統的設計需要在項目設計初期,依據給定的環境條件和總布置計算環境載荷,求解推進器推力方程,繪制動力定位曲線,從而確定推進器的選型和布置。考慮以3 000 t全回轉起重船為研究對象,通過模塊法計算該船各個方向下的風載荷和流載荷,利用三維勢流軟件計算二階波浪漂移力,依據動力定位系統原理,建立橫向力、縱向力和垂向力矩推力方程,使用規劃求解法和全局變量法求解推進器推力分配數學模型,計算得到完整狀態和單一推進器失效,以及帶有推進器限制角狀態下的推力分配方案[1],繪制該船的動力定位曲線。
1 環境載荷
確定坐標原點,建立統一的坐標系,該坐標系以船舯與水線面和中縱剖面的交點為原點,沿船艏方向為X的正方向,從左舷往右舷方向Y的正方向,垂直向上為Z軸正方向,迎浪方向為0°,順時針為正,見圖1。

圖1 坐標系及環境載荷方向
進行動力定位分析,按照行業常規做法,假設風浪流同向,并且互不干擾[2],即風浪流載荷在同一方向為船舶承受的最惡劣環境載荷。計算風載荷時,依據美國石油協會(API)規范或者挪威石油標準化(NOSOK)規范,采用模塊法對船體各部件進行建模求解[3],并進行無因次化,得到各方向上的風載荷系數。對于流載荷,各船級社也給出了相應的經驗公式。特別的,國際石油海運協會(OCIMF)提供了不同長寬比下,常規船艏型和圓柱型船艏的大型油輪,在不同的水深條件下的流載荷系數[4]曲線。而對于二階波浪漂移力常規的做法是采用成熟的勢流軟件進行計算,其理論有遠場法和近場法,同時APR2P給出了不同排水量鉆井船和半潛平臺在不同吃水下的二階波浪漂移力系數[5],可直接用于該類船型的漂移力計算。
2 推力分配
2.1 推力估算
在項目設計初期,一般只能確定推進器的類型和功率大小,推進器廠家可通過調節螺旋槳的槳距和葉片攻角得到相應的推力。對于常規船舶,由于艏部線型變化大,空間狹小等因數,推進器一般采用側推形式,在艏側推能力不夠的情況下,可增加1臺伸縮推或者全回轉推進器進行補償。不同推進器推力與功率的關系,可依據IMCA中的規定進行計算,不同推進器推力和功率換算見表1。
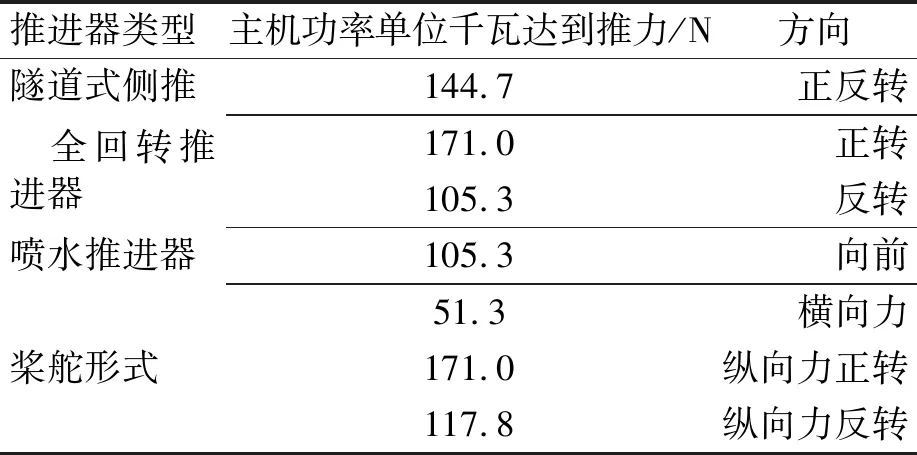
表1 不同推進器推力-功率換算表
2.2 推進器效率
影響推進器效率的因素包括船體寬度、水流速度、推進器的俯仰角度、推進器與推進器之間的距離等。其中推進器間距影響最大,位于同一直線上的兩個推進器,尾部推進器效率可通過下述公式計算得到[6]。
(1)
式中:x為兩個推進器的間距,m;D為推進器的直徑,m。
由式(1)可知,當推進器之間距離減少時,靠后的推進效率成指數形式下降,特別是位于尾部的推進器,由于推進器之間距離較近,當推進器旋轉方向一致時,會導致位于尾流中的推進器的效率大大降低。因此,為了提高船舶的定位能力,一般對該類推進的旋轉角度規定1個限制區域,防止在實際運營過程中低效率定位。同時,改變推進器的俯仰角度也能有效提高推進效率,并且在俯仰角度為0°時推進效率越低,改變俯仰角度之后,推進效率提高越明顯。船體的寬度和水流速度的影響,也可依據ABS船級社規定的DPS指南進行計算,通常按最大推力的20%作為冗余度進行設計。
2.3 數學模型
動力定位的基本原理是通過優化方法求解一組能耗最小推力分布,用來平衡規定條件下的環境載荷,并使船舶保持一定的位置和方向。基于該原理,將動力定位能力計算轉化一個單目標多約束的優化問題,其目標函數是所有的推進器推力總和最小,為了便于求解,其目標函數設定如下。
(2)
式中:Ti為單個推進器的推力。
同時,為了保證推進器推力與環境載荷平衡,其需要滿足如下約束條件。
(3)
式中:Fx、Fy、Mz為對應方向的環境總載荷;xi、yi為單個推進器坐標;αi為單個推進器推力方向。
求解過程中,為防止推力計算結果超過其推進器的能力,需要對推力進行約束,同時按照2.2規定推力的冗余度,保證定位能力,其推力約束如下。
0≤Ti≤0.8Tmax
(4)
對于隧道式推進器,其產生的推力只能沿著推進器軸線方向,當推進器位置確定時,其約束條件定義如下。
Ti=Tmax×sinαi
(5)
式中:αi=90°或αi=180°。
相對于隧道式推進器,全回轉推進器可提供360°方向推力,對于尾部相鄰的全回轉推進器,需要設定回轉禁止角,防止推進器效率過低,約束條件如下。
(6)
式中:αup和αdn為全回轉推進器的回轉限制角的上、下限。
2.4 動力定位曲線求解邏輯
對于上述推力分配數學模型,采用規劃求解和全局變量法兩種優化方法分別對目標船進行求解,并對比兩種優化方法的計算結果。
由于規劃求解的結果與初值的選取有很大關系,若初始值不在全局最優解的鄰域內,優化結果得到的將是局部最優解,見圖2。對應的推力分配,會出現部分推進器滿載,部分推進器空載的現象,在實際定位過程中,為保護設備安全運行,需避免出現這種工況。

圖2 不同優化方法最優解展示
為了解決規劃求解得到局部最優解的問題,需要對計算過程進行調整。第一步,需要每隔10°計算該方向的環境載荷,包括風載荷、流載荷和二階波浪漂移力。第二步,固定一個環境方向,設定推進器的旋轉范圍,調整推進器的角度,每隔10°求解一組推力和方向,直至初始角度覆蓋所有方向。第三步,比較該環境方向下,各初始角度下總的推進器推力最小值,選取該組數據為該方向下最優的推力和方向分配方案。第四步,改變環境方向,輸入下一組環境載荷,按照相同流程計算,直至求解所有的環境方向。具體實現流程見圖3。
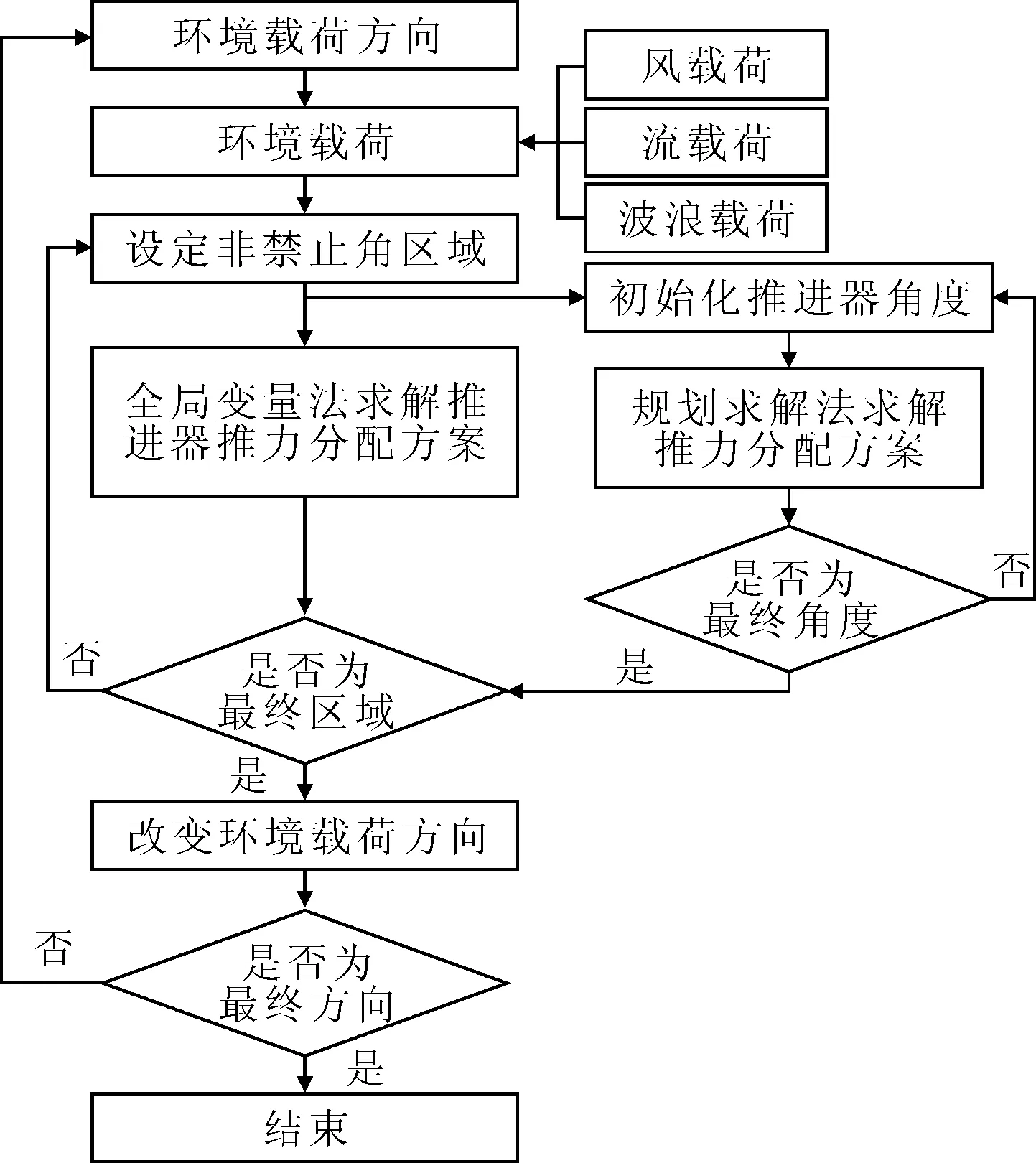
圖3 規劃求解和全局變量法求解流程
全局變量法的優化結果與初始值的選取無關,采用該方法求解時增加了推進器限制角,其約束條件的設置方式見式(6),然后比較選取推力總額較小的推力分配方案。相比于規劃求解法,全局變量法的優點是邏輯較為簡單,不會因為初始值得不同而導致結果不同,但是在實際運行過程中,時間較長,效率較低,不能進行實時計算。
在進行動力定位失效分析時,倘若某一組或者某一個推進器失效時,可將該推進器的最大推力設定為0,然后依據上述流程進行求解,即可得到失效模式下的動力定位變化值。
3 算例分析
為了驗證上述方法的正確性,選取某3 000 t全回轉起重船進行分析,該船的主尺度見表2。
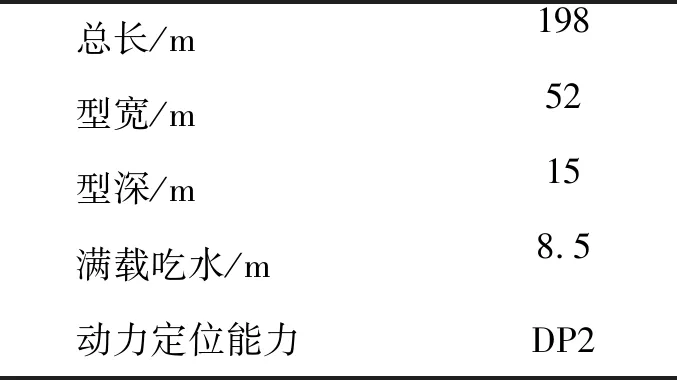
表2 3 000 t全回轉起重船主尺度
該船艏部配備2臺隧道式推進器和1臺伸縮式全回轉推進器,尾部配備3臺全回轉推進器,其動力定位系統配備兩種類型的推進器,具有一般性。該船各推進器的布置及性能指標見表3。
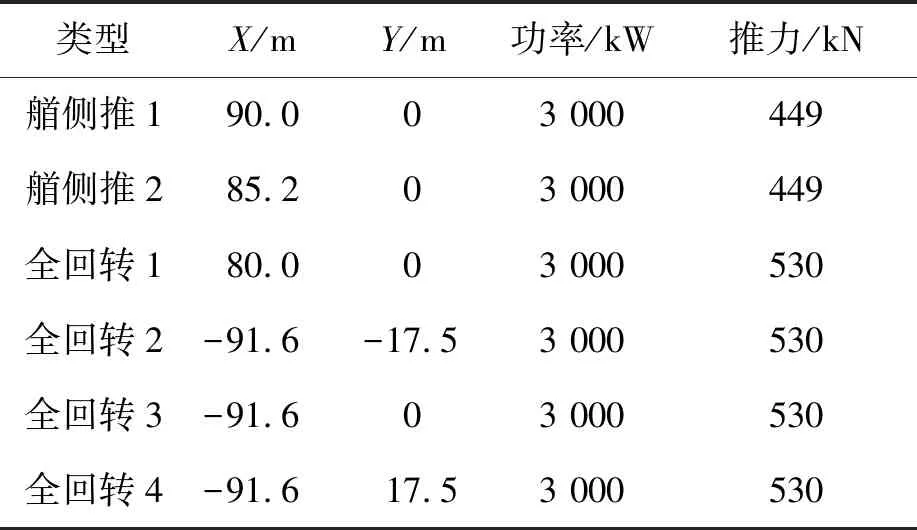
表3 全回轉起重船推進器布置及性能指標
由于該船尾部配備的3臺全回轉推進器距離較近,為了提高推力效率,對尾部的全回轉推進器設定一個相應的旋轉限制角,3個推進器的旋轉角度范圍見表4。

表4 尾部全回轉推進器旋轉域 (°)
采用規劃求解法和全局變量法分別求解帶限制角和不帶限制角的推力方程,得到各推進器動力分配方案,并繪制各方向下推進器功率消耗曲線,結果見圖4和圖5。

圖4 不同優化方法動力定位能力(不帶限制角)

圖5 不同優化方法動力定位能力(帶限制角)
由圖4可知,對于全回轉推進在不設置推進器旋轉限制角的情況下,兩種優化方法計算的結果基本一致,且定位能力曲線左右對稱,與實際情況相符;由圖5可知,當設定旋轉限制角以后,部分角度下的推進器的推力有所增加,這是由于在該環境載荷方向下,推力分配方案中推進器最優的旋轉角度位于限制角以內,當改變推進器角度時,推進功率也會相應增加。
相比于規劃求解法,采用全局變量法在帶有推進器旋轉限制角的情況下,得到的定位能力曲線左右對稱,比規劃求解法更加符合實際;而采用規劃求解法在環境載荷0°~180°之間的定位能力優于180°~360°,偏差產生的原因可能是初始角度步長過大的,導致在180°~360°之間得到的推力分配為局部最優分配方案。
對比全局變量法得到的定位能力與Kongsberg提供的曲線,見圖6。
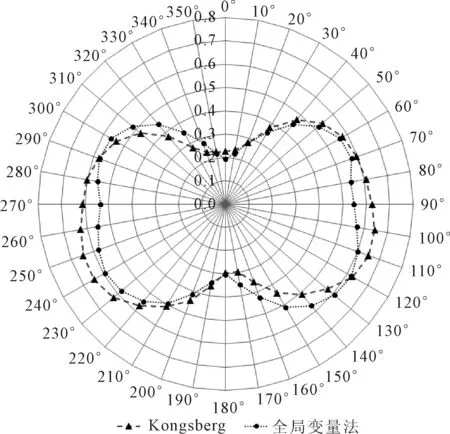
圖6 完整模式下動力定位能力對比
由圖6可知,在推進器完整模式下,采用本文計算方法得到的推力分配方案整體優于Kongsberg提供的數據,但是在部分角度Kongsberg還有具備一定的優勢。
假定2號全回轉推進失效,采用本文所述全局變量法計算動力定位能力曲線,并與Kongsberg提供的數據對比,見圖7。結果表明,采用本文方法得到推力配置方案,與Kongsberg提供數據在各方向總體趨勢保持一致,且在各方向上的推力配置明顯優于Kongsberg;特別是,在環境載荷在70°~130°和240°~290°之間,其最大推力功率小于Kongsberg提供數據的10%以上。

圖7 單一推進器失效模式下動力定位能力對比
4 結論
1)不考慮推進器限制角,采用規劃求解和全局求解法均能得到較好的推力分配方案,判斷推進器選型和布置是否合理。
2)增加推進器旋轉限制角的約束后,規劃求解法解計算得到的推力分配方案不能在所有方向上求解出最優解,可通過修改初始推力值或推力方向重新計算得到最優解。
3)在單一推進器失效模擬下,全局變量法得到的推力分配方案在各方向上與Kongsberg的結果保持一致,能夠滿足設計需求。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
甘肅教育(2020年14期)2020-09-11 07:57:42
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
時代英語·高二(2015年1期)2015-03-16 00:08:11
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
