轉(zhuǎn)角脈沖試驗(yàn)中橫擺角速度誤差注入與模擬
2023-08-27 09:57:16鄒安幫李鵬吳婷婷熊威
農(nóng)業(yè)裝備與車輛工程 2023年8期
鄒安幫,李鵬,吳婷婷,熊威
(210037 江蘇省 南京市 南京林業(yè)大學(xué) 汽車與交通工程學(xué)院)
0 引言
隨著計(jì)算機(jī)技術(shù)的發(fā)展,虛擬樣機(jī)技術(shù)在汽車試驗(yàn)中得到廣泛應(yīng)用,如ADAMS、CarSim 等[1]。虛擬樣機(jī)技術(shù)通過車輛動(dòng)力學(xué)模型進(jìn)行仿真,可以仿真車輛對駕駛員、路面及空氣動(dòng)力學(xué)輸入的響應(yīng),也可用來預(yù)測和仿真汽車整車的操縱穩(wěn)定性、制動(dòng)性、平順性、動(dòng)力性和經(jīng)濟(jì)性等試驗(yàn)。
虛擬樣機(jī)中動(dòng)力學(xué)模型輸出的數(shù)據(jù)是理想化的,不存在傳感器等設(shè)備的誤差,而在實(shí)車試驗(yàn)測量中,由于外界條件、儀器設(shè)備等因素的影響,測量所得到的的數(shù)值與被測參數(shù)的真實(shí)值之間總會(huì)有所不同,二者之間存在誤差。目前有關(guān)動(dòng)力學(xué)模型輸出數(shù)據(jù)注入誤差的文獻(xiàn)較少,多為針對提升測量單元的精度進(jìn)行傳感器的標(biāo)定和補(bǔ)償。如賈浩男等[2]分析MEMS 慣性測量單元的誤差原理以提高M(jìn)EMS-IMU 傳感器精度,建立微陀螺儀和微加速度計(jì)的誤差模型,并對其進(jìn)行標(biāo)定和補(bǔ)償實(shí)驗(yàn)來提高導(dǎo)航與定位的精度;馬亞平等[3]針對傳統(tǒng)的正交補(bǔ)償方法難以保證慣性測量單元具有較高正交補(bǔ)償精度的問題,提出了一種改進(jìn)的適用于大角度和小角度安裝誤差角情形的正交補(bǔ)償方法;楊莉等[4]對慣性傳感器的誤差來源進(jìn)行了分析,建立了精簡后向傳播神經(jīng)網(wǎng)絡(luò)來表征環(huán)境溫度、機(jī)械安裝誤差、機(jī)械振動(dòng)與電磁干擾因素對誤差的影響模型,并利用該方法對慣性傳感器誤差進(jìn)行了標(biāo)定。
為了使操縱穩(wěn)定性試驗(yàn)數(shù)據(jù)接近實(shí)車試驗(yàn)數(shù)據(jù),本文采用ADAMS/Car 軟件建立整車模型進(jìn)行操縱穩(wěn)定性中的轉(zhuǎn)角脈沖試驗(yàn),建立傳感器誤差模型,對試驗(yàn)數(shù)據(jù)進(jìn)行誤差注入與模擬。
1 整車模型的建立
在ADAMS 中搭建一個(gè)完整的車輛模型,需要包括車輛的車輪、懸架、轉(zhuǎn)向以及車身子系統(tǒng)[2]。ADAMS/Car 仿真軟件自帶各個(gè)系統(tǒng)的模板,在模板的基礎(chǔ)上加上各系統(tǒng)的屬性文件,最后裝配組合成整車模型[3]。整車建模的順序如圖1 所示。ADAMS/Car 仿真軟件中的整車模型如圖2 所示。

圖1 整車模型的建立過程Fig.1 The process of building vehicle model

圖2 ADAMS/Car 中的整車模型Fig.2 Full vehicle model in ADAMS/Car
2 誤差理論簡介
在所有的測量環(huán)節(jié)中,由于儀器自身原因和外界影響都會(huì)影響測量數(shù)據(jù)的準(zhǔn)確性,被測量參數(shù)的真實(shí)值會(huì)和測量值有一定的偏差,即測量誤差。測量誤差可分為以下3 類。
(1)系統(tǒng)誤差。系統(tǒng)誤差可分為固定系統(tǒng)誤差和變化系統(tǒng)誤差。變化系統(tǒng)誤差會(huì)具有一定的規(guī)律性,如累進(jìn)系統(tǒng)誤差為每次測量都成倍增加或減少一個(gè)固定誤差。比如,測量儀器在制造時(shí),指針沒有精確指在零位;加速度傳感器設(shè)計(jì)時(shí)3 個(gè)軸沒有正交產(chǎn)生的誤差,此時(shí)加速度傳感器每個(gè)軸都會(huì)有一個(gè)零漂值。
(2)隨機(jī)誤差。在相同條件下,對同一個(gè)被測參數(shù)進(jìn)行多次重復(fù)性測量,可能會(huì)得到不完全相同的測量數(shù)據(jù),得到的測量數(shù)據(jù)存在的誤差在數(shù)值和符號(hào)方面可能各不相同,這些誤差稱為隨機(jī)誤差。隨機(jī)誤差是由于一些因素產(chǎn)生細(xì)微變化時(shí)對測量數(shù)據(jù)產(chǎn)生的影響,且這些因素相互獨(dú)立。如電阻產(chǎn)生感應(yīng)信號(hào)的傳感器會(huì)因?yàn)榄h(huán)境溫度的細(xì)微波動(dòng)產(chǎn)生誤差。隨機(jī)誤差由于影響因素相互獨(dú)立,且沒有規(guī)律性,所以對于個(gè)體的隨機(jī)誤差沒有規(guī)律且無法避免,但是對于總體而言,隨機(jī)誤差在測量次數(shù)達(dá)到一定程度后會(huì)服從正態(tài)分布的統(tǒng)計(jì)學(xué)規(guī)律[4]。
(3)過失誤差。造成過失誤差的原因可能是在測量工作時(shí)疏忽大意或者錯(cuò)誤使用儀器。隨著目前科學(xué)技術(shù)的進(jìn)步,傳感器多是帶有數(shù)字輸出功能,不會(huì)出現(xiàn)操作錯(cuò)誤和疏忽大意的情況,所以過失誤差不再過多討論。
3 陀螺儀誤差模型
陀螺儀的基本原理為:在經(jīng)典哥氏慣性力理論的基礎(chǔ)上,利用哥氏效應(yīng)得到角速度值。陀螺儀產(chǎn)生的誤差主要分為系統(tǒng)誤差和隨機(jī)誤差。
3.1 陀螺儀系統(tǒng)誤差
陀螺儀的系統(tǒng)誤差主要有零偏與標(biāo)度因素誤差、安裝誤差以及比力有關(guān)項(xiàng)誤差[5]。
(1)零偏與標(biāo)度因素誤差。由于傳感器內(nèi)部器件會(huì)有干擾力矩,相應(yīng)產(chǎn)生的誤差即為傳感器的零偏誤差。當(dāng)傳感器零輸入時(shí),對其進(jìn)行多次測量,求得輸出值的平均值即為零偏值。在陀螺儀的量程內(nèi),對輸入和輸出值進(jìn)行擬合,傳感器的輸出值與輸入值的斜率偏差即為標(biāo)度因素。標(biāo)度因素包括標(biāo)度因素的重復(fù)性、非線性、不對稱性等多項(xiàng)指標(biāo)[6]。
(2)安裝誤差。指傳感器中各元件安裝時(shí)會(huì)產(chǎn)生安裝誤差角,主要是由于六面體安裝不正交引起的。
(3)比力有關(guān)項(xiàng)誤差。主要成因有兩方面:①由于本身原理以及工藝不完善;②由于過載的角運(yùn)動(dòng)等力學(xué)因素[7]。所以由力學(xué)引起的誤差均為比力有關(guān)項(xiàng)誤差。
由以上系統(tǒng)誤差的組成得到陀螺儀的系統(tǒng)誤差模型為
式中:ωtx,ωty,ωtz——軸陀螺儀輸出值,(°)/s;ωx0,ωy0,ωz0——軸陀螺儀的零偏漂移值,(°)/s;Sgx,Sgy,Sgz——軸陀螺儀的標(biāo)度因素;δij——i 軸偏向j 軸的安裝誤差系數(shù);ωlx,ωly,ωlz——陀螺儀輸入值(°)/s;dij——i 軸陀螺儀輸出與向j 軸比力有關(guān)系數(shù),即與g有關(guān)項(xiàng);ax,ay,az——各軸非引力加速度。
3.2 陀螺儀隨機(jī)誤差
陀螺儀在車載運(yùn)動(dòng)時(shí),處于振動(dòng)狀態(tài),傳統(tǒng)的誤差分析方法無法分析出誤差的種類、幅值和比重等信息。本文采用Allen 方差分析法來確定誤差的類型、大小和比重,并據(jù)此建立陀螺儀的隨機(jī)誤差模型。
Allen 方差分析的各種誤差源如圖3 所示,特征參數(shù)指標(biāo)如表1 所示。不同指標(biāo)對應(yīng)不同的斜率。

表1 Allan 標(biāo)準(zhǔn)差分析曲線中各種誤差源Tab.1 Various error sources in collimation analysis curves

圖3 曲線斜率與誤差成分關(guān)系Fig.3 Relation between curve slope and error component
則陀螺儀的Allen 方差為
式中:σQ——量化噪聲標(biāo)準(zhǔn)誤差;σN——隨機(jī)游走標(biāo)準(zhǔn)誤差;σB——零偏不穩(wěn)定性標(biāo)準(zhǔn)誤差;σK——速率隨機(jī)游走標(biāo)準(zhǔn)誤差;σR——速率斜坡標(biāo)準(zhǔn)誤差。
4 陀螺儀誤差注入與模擬
由于轉(zhuǎn)角脈沖試驗(yàn)中需要對橫擺角速度進(jìn)行測量,而橫擺角速度由陀螺儀的Z 軸測量得到,且陀螺儀包含系統(tǒng)誤差和隨機(jī)誤差,可得陀螺儀誤差注入模型為
式中:ωt——加入誤差后輸出值;ω0——?jiǎng)恿W(xué)模型輸出值;fω——系統(tǒng)誤差;Δω——隨機(jī)誤差;ωi=ω0+fω——?jiǎng)恿W(xué)模型輸出值與系統(tǒng)誤差的和。
陀螺儀誤差模型的系數(shù)可根據(jù)具體傳感器標(biāo)定系數(shù)進(jìn)行設(shè)置,誤差模型系數(shù)如表2 和表3 所示。
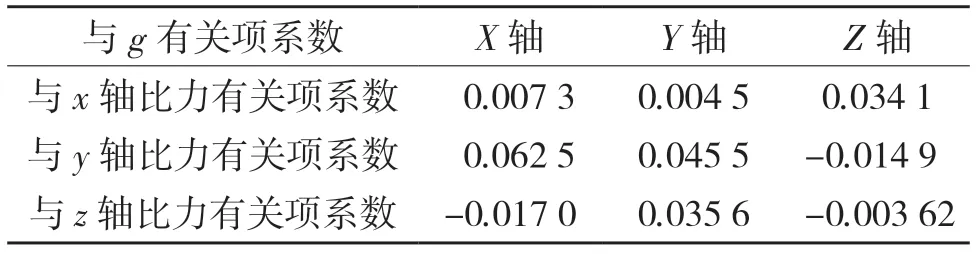
表2 陀螺儀與g 有關(guān)項(xiàng)系數(shù)Tab.2 Coefficients of gyroscope and g-related term

表3 陀螺儀的系統(tǒng)誤差模型系數(shù)Tab.3 Systematic error model coefficients of gyroscope
則陀螺儀的系統(tǒng)誤差模型為
將式(4)和陀螺儀Z 軸Allen 方差帶入式(3)得
式中:ωlx,ωly,ωlz——?jiǎng)恿W(xué)模型中3 個(gè)方向的角速度輸出值;ax,ay,az——各軸非引力加速度;Δω——服從均值是0、方差是σωtotal的正態(tài)分布隨機(jī)數(shù),由MATLAB 中normrnd()函數(shù)生成。
設(shè)置的陀螺儀傳感器的Allen 方差如表4 所示。

表4 陀螺儀Allen 方差Tab.4 Gyroscope Allen variance
由式(2)可得陀螺儀的橫擺角速度(Z 軸)隨機(jī)誤差的方差為σωtotal=0.073 376°。
4.1 陀螺儀誤差注入實(shí)例
本文針對轉(zhuǎn)向盤轉(zhuǎn)角脈沖試驗(yàn)得到的橫擺角速度進(jìn)行誤差注入與模擬。采用GB/T 6323-2014《汽車操縱穩(wěn)定性試驗(yàn)方法》[8]進(jìn)行試驗(yàn),本文車輛模型設(shè)計(jì)最高車速為174.2 km/h,則試驗(yàn)車速為V=174.2×70%=120 km/h;方向盤轉(zhuǎn)角脈寬輸入為0.5 s;最大轉(zhuǎn)角需使側(cè)向加速度達(dá)到4 m/s2。
通過試驗(yàn)得到的側(cè)向加速度隨時(shí)間變化曲線如圖4 所示,表明本次試驗(yàn)符合國家標(biāo)準(zhǔn)規(guī)定的試驗(yàn)工況。根據(jù)陀螺儀誤差模型式(5)可知,比力有關(guān)項(xiàng)還需要輸出縱向加速度和垂向加速度,如圖5 和圖6 所示。

圖4 側(cè)向加速度隨時(shí)間變化曲線Fig.4 Curve of lateral acceleration with time

圖5 縱向加速度隨時(shí)間變化曲線Fig.5 Curve of longitudinal acceleration with time

圖6 垂向加速度隨時(shí)間變化曲線Fig.6 Curve of vertical acceleration with time
根據(jù)陀螺儀誤差模型式(5)可知,還需要?jiǎng)恿W(xué)模型中三個(gè)方向的陀螺儀輸出值。轉(zhuǎn)角脈沖試驗(yàn)三個(gè)方向的角速度隨時(shí)間變化曲線如圖7、圖8、圖9 所示。

圖7 橫擺角速度隨時(shí)間變化曲線Fig.7 Curve of yaw angular velocity with time

圖8 側(cè)傾角速度隨時(shí)間變化曲線Fig.8 Curve of roll angular velocity with time

圖9 俯仰角速度隨時(shí)間變化曲線Fig.9 Curve of pitch angular velocity with time
根據(jù)陀螺儀誤差注入模型即式(5),通過誤差計(jì)算并對注入誤差后的橫擺角速度進(jìn)行模擬,可得到注入誤差后的橫擺角速度隨時(shí)間變化的曲線如圖10 所示。

圖10 橫擺角速度隨時(shí)間變化曲線Fig.10 Curve of yaw angular velocity with time
4.2 誤差注入驗(yàn)證
判斷誤差時(shí),測量數(shù)據(jù)需滿足一定的數(shù)量要求,所以在原試驗(yàn)基礎(chǔ)上再進(jìn)行9 次轉(zhuǎn)角脈沖試驗(yàn),提取所有試驗(yàn)的橫擺角速度峰值,如表5 所示。由表5 測量數(shù)據(jù)可得正態(tài)分布概率圖如圖11 所示。使用MATLAB 中l(wèi)illietest()函數(shù)對數(shù)據(jù)進(jìn)行正態(tài)分布檢驗(yàn),lillietest()函數(shù)返回值H 為假設(shè),只有0 和1 兩種情況,H=0 假設(shè)符合正態(tài)分布,H=1 假設(shè)不符合正態(tài)分布。返回值P 為方差概率,即事情的發(fā)生概率:P<0.05 為不可能事件,拒絕假設(shè);P>0.05,接受假設(shè)。對表5 中的數(shù)據(jù)進(jìn)行正態(tài)分布檢驗(yàn)返回結(jié)果H=0,P=0.211 5>0.05,表示其符合正態(tài)分布。說明存在隨機(jī)誤差。

表5 10 次試驗(yàn)的橫擺角速度峰值Tab.5 Peak yaw rate for 10 trials

圖11 正態(tài)分布概率圖Fig.11 Normal distribution probability plot
為了檢驗(yàn)傳感器的系統(tǒng)誤差,需要改變試驗(yàn)條件,即對陀螺儀的系統(tǒng)誤差系數(shù)重新設(shè)置。重新設(shè)置的系統(tǒng)誤差系數(shù)如表6、表7 所示。

表6 重新設(shè)置后陀螺儀系統(tǒng)誤差系數(shù)Tab.6 Error coefficient of gyroscope system after reset

表7 重新設(shè)置后陀螺儀與g 有關(guān)項(xiàng)系數(shù)Tab.7 Coefficients of gyroscope and g-related term after reset
根據(jù)式(1)可得到重新安裝后的陀螺儀誤差模型為
式中:Δω——服從均值是0、方差是σωtotal=0.073 376 °的正態(tài)分布隨機(jī)數(shù);其余變量含義與式(5)相同。
將重新設(shè)置系統(tǒng)誤差系數(shù)的誤差模型進(jìn)行轉(zhuǎn)角階躍試驗(yàn)10次,提取橫擺角速度峰值如表8所示。

表8 陀螺儀重新設(shè)置后注入誤差后的橫擺角速度峰值Tab.8 Peak yaw rate after injecting error after gyro remount
由表8 數(shù)據(jù)可得正態(tài)分布概率圖,如圖12所示,數(shù)據(jù)符合正態(tài)分布,且使用MATLAB 中l(wèi)illietest()函數(shù)對數(shù)據(jù)進(jìn)行正態(tài)分布檢驗(yàn),返回結(jié)果H=0,P=0.145 8>0.05,表示其符合正態(tài)分布,說明存在隨機(jī)誤差。

圖12 重新設(shè)置后橫擺角速度峰值正態(tài)分布概率圖Fig.12 Probability map of normal distribution of peak yaw rate after reset
將表5 和表8 中的數(shù)據(jù)繪制于一張正態(tài)分布概率圖,如圖13 所示。由圖13 可知,數(shù)據(jù)不符合正態(tài)分布,且使用MATLAB 中l(wèi)illietest()函數(shù)對數(shù)據(jù)進(jìn)行正態(tài)分布檢驗(yàn),返回結(jié)果H=1,表示其不符合正態(tài)分布。

圖13 正態(tài)分布概率圖Fig.13 Normal distribution probability plot
根據(jù)分布檢驗(yàn)法,若隨機(jī)誤差服從正態(tài)分布,則包含隨機(jī)誤差的測量值也服從正態(tài)分布。所以,測量列若服從正態(tài)分布,則測量列含有隨機(jī)誤差,反之,若測量列不服從正態(tài)分布,則有理由懷疑測量列中含有系統(tǒng)誤差[9]。
綜上,根據(jù)分布檢驗(yàn)法,重新設(shè)置系統(tǒng)誤差系數(shù)前后的數(shù)據(jù)分別符合正態(tài)分布,表明其各含有隨機(jī)誤差,而重新設(shè)置系統(tǒng)誤差系數(shù)前后所有測量數(shù)據(jù)不服從正態(tài)分布,則表明陀螺儀含有系統(tǒng)誤差。由上文可知給陀螺儀注入了系統(tǒng)誤差和隨機(jī)誤差,與誤差判別的結(jié)論一致,所以傳感器誤差模型與誤差注入方法可行。
5 結(jié)語
(1)本文根據(jù)陀螺儀傳感器的構(gòu)造與誤差產(chǎn)生機(jī)理,對陀螺儀系統(tǒng)誤差和隨機(jī)誤差的數(shù)學(xué)特性進(jìn)行分析,建立了相應(yīng)的誤差模型。
(2)本文提出一種隨機(jī)誤差注入方法,對車輛動(dòng)力學(xué)模型輸出的橫擺角速度數(shù)據(jù)進(jìn)行誤差注入模擬,由分布檢驗(yàn)法驗(yàn)證了誤差注入方法的有效性。
(3)本研究存在一定的局限性,由于傳感器需要經(jīng)過實(shí)驗(yàn)標(biāo)定才能確定誤差的具體數(shù)值,所以本文驗(yàn)證方法只能確定誤差的類型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03