芹菜收獲機切割機構的設計及性能分析
2023-08-31 16:28:27杜成成林致聞王錫瑋王偉偉葉秉良
浙江理工大學學報 2023年6期
杜成成 林致聞 王錫瑋 王偉偉 葉秉良

摘 要: 針對中國南方芹菜收獲機械缺乏以及人工作業效率低、成本高等問題,在研究芹菜根部的機械物理特性基礎上,結合芹菜種植農藝要求,提出了一種手扶式芹菜收獲機用直動平底推桿凸輪式雙動刀往復切割機構。采用幾何方法和動態靜力分析法對切割機構進行運動學和動力學分析,建立以凸輪轉動中心的受力方差為評價指標的優化設計模型,并運用遺傳算法對切割機構參數進行優化。通過切割機構虛擬樣機進行仿真驗證,并研制芹菜收獲機樣機,進行工作性能測試試驗。試驗結果顯示:芹菜切割成功率為82%,驗證了切割機構設計的可行性,表明該機器在南方芹菜的收獲作業中具有較高應用價值。該研究可為芹菜收獲機切割機構的研發提供理論和試驗依據。
關鍵詞: 芹菜收獲機;切割機構;凸輪;運動學分析;動力學分析
中圖分類號: S225.91
文獻標志碼: A
文章編號: 1673-3851 (2023) 07-0533-08
引文格式:杜成成,林致聞,王錫瑋,等. 芹菜收獲機切割機構的設計及性能分析[J]. 浙江理工大學學報(自然科學),2023,49(4):533-540.
Reference Format: DU Chengcheng, LIN Zhiwen, WANG Xiwei, et al. Design and performance analysis of the cutting mechanism of celery harvesters[J]. Journal of Zhejiang Sci-Tech University,2023,49(4):533-540.
Design and performance analysis of the cutting mechanism of celery harvesters
DU Chengchenga, LIN Zhiwena, WANG Xiweia, WANG Weiweia, YE Binglianga,b
(a.School of Mechanical Engineering; b.Key laboratory of Transplanting Equipment and Technology of Zhejiang Province, Zhejiang Sci-Tech University, Hangzhou 310018, China)
Abstract:? In response to the lack of celery harvesting machinery, as well as low labor efficiency and high cost in the artificial harvesting in southern China, a cam-style double-knife reciprocating cutting mechanism with a straight moving flat bottom push rod for walking celery harvesters was proposed based on the study of the physical and mechanical characteristics of celery roots and combined with the agronomic requirements of celery planting. The kinematics and dynamics of the cutting mechanism were analyzed by using the geometric method and the dynamic static analysis method. The optimization design models of the cutting mechanism were established with the force variance of cam rotation center as the evaluation index. The parameters of the cutting mechanism were optimized by genetic algorithm. The simulation verification was conducted by virtual prototype of the cutting mechanism, and a celery harvester prototype was developed for working performance tests. The test results show that the success rate of celery cutting is 82%, verifying the feasibility of the cutting mechanism design and showing high application value in the harvesting operation of celery in southern China. The research can provide theoretical and experimental basis for the cutting mechanism development of celery harvesters.
Key words: celery harvester; cutting mechanism; cam; kinematics analysis; dynamics analysis
0 引 言
芹菜種植產業是中國蔬菜產業重要的組成部分,對發展中國農村經濟、促進鄉村共富具有重要的促進作用。中國芹菜種植面積常年保持在55萬hm2左右,總產量約2000萬t[1];2021年中國芹菜出口總量高達2.42萬t,總金額達1.41億元人民幣【數據來源于海關總署官方網站:http://stats.customs.gov.cn/。】。目前芹菜收獲主要以人工收獲為主,但人工作業勞動強度高、效率低,導致芹菜生產成本上升,阻礙芹菜種植產業發展[2-3]。芹菜收獲機械可以解決人工作業的弊端,因此研發芹菜收獲機械是一項緊迫的課題。
切割機構是芹菜收獲機械的核心機構。目前,國內外對葉菜類蔬菜收獲機及其切割機構進行了許多研究,有些機器已應用于實際收獲作業。Shin等[4]設計了自走式玉米收獲機,采用盤式平面割刀,切割效率高,但切割范圍與圓盤的直徑相關,通常需要并聯多個盤式平面割刀,導致機構結構復雜。伍淵遠等[5]設計了一種三行溫室芹菜收獲機,采用往復式切割機構為結構簡單的偏置曲柄塊機構,但傳動效率較低。張貝貝等[6]設計的油菜循環鏈式切割器工作時振動小,但不適合入土切割,因此不適合用于芹菜收割。由于中國芹菜品種眾多,各個品種的機械物理特性和種植農藝不同,如根莖粗壯程度、畦寬和定植株行距等[7-9],目前在實際生產中還沒有適?? 合南方芹菜收獲作業的機器。
本文研究了芹菜的機械物理特性和種植農藝,在此基礎上提出了一種適用于手扶式芹菜收獲機的直動平底推桿凸輪式雙動刀往復切割機構。開展切割機構運動學和動力學建模,分析其運動特性,并應用遺傳算法對切割機構參數進行優化;通過切割機構虛擬仿真得到其運動特性仿真曲線,通過理論曲線和仿真曲線的比較和分析驗證機構運動學和動力學模型及機構設計的正確性。開展機構樣機切割性能測試試驗,得到芹菜切割成功率和分析切割效果驗證機構的應用可行性。本文設計了芹菜收獲機的切割機構,以促進芹菜收獲機械的研發工作,為芹菜收獲機的實際應用提供依據。
1 切割機構的方案設計
1.1 芹菜根部的機械物理特性
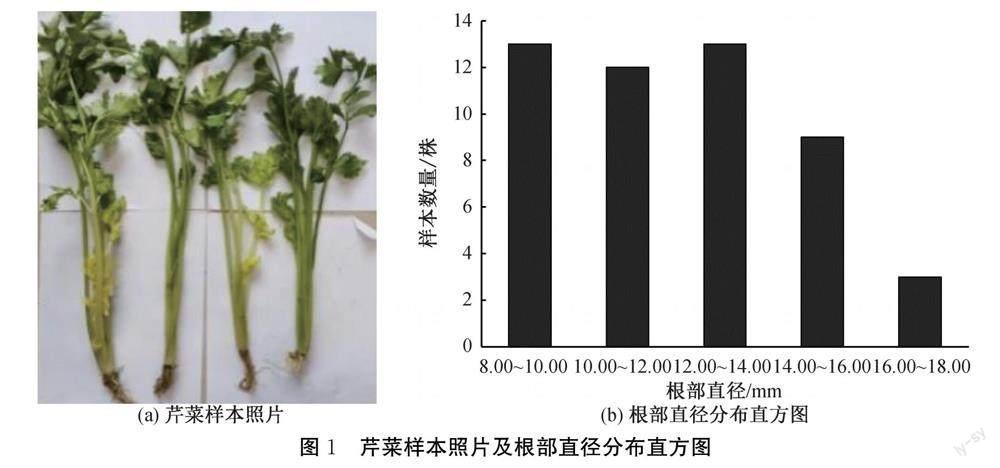
芹菜根部直徑和割刀切割力是芹菜收獲機切割機構設計的重要參數,因此需要測量統計芹菜根部直徑并開展根部切割力測試試驗[10-14]。本文選取杭州市種植的津南實芹一號芹菜為試驗對象,樣本50株,芹菜樣本照片如圖1(a)所示。采用游標卡尺對芹菜樣本根部的直徑進行測量,芹菜根部直徑分布直方圖如圖1(b)所示。芹菜根部直徑范圍為8.29~17.71 mm,主要集中在8.00~14.00 mm,平均直徑為12.32 mm。
采用LDW-1萬能材料試驗機進行芹菜根部切割力試驗,切割力試驗平臺照片如圖2所示。選? 取10株根部直徑不同的芹菜樣本進行測試并作記錄。試驗時,先用夾具夾緊芹菜,割刀上升的速度為?? 10 mm/s。切割部位為芹菜根莖結合點下方10 mm處的根部,記錄切斷根部所需的切割力值,切割力統計見表1。由表1可知,芹菜根部的直徑越大,所需切割力越大,最大切割力為29.40 N。
1.2 芹菜收獲機的整體結構
中國南方芹菜的種植農藝要求:溫室大棚的畦寬為1000~1200 mm,芹菜定植株行距為90 mm。根據該種植農藝要求,本文提出了一種四行手扶式芹菜收獲機。該機器的裝置示意圖如圖3所示,主要由撥禾輪1、傳動系統2、車輪3、車架4、電動推桿5、行程開關6、輸送帶7、收集箱8、控制箱9、電機10、切割機構11組成。
在芹菜收獲作業時,首先啟動電機10,同時按下控制箱9的啟動按鈕,電動推桿5開始回縮,割臺高度隨之下降,當行程開關6接觸到地面,電動推桿停止運動,此時切割機構11到達土下切割工作位置;然后人工推動芹菜收獲機前進,當切割機構11對芹菜根部進行切割后,撥禾輪1把芹菜壓向輸送帶7上,再通過輸送帶7運送到收集箱8,完成收獲作業。
1.3 切割機構的結構和工作原理
芹菜收獲機采用直動平底推桿凸輪式雙動刀往復切割機構,由下刀片1、上刀片2、上刀桿3、下刀桿4、上邊框5、下邊框6、下凸輪7、上凸輪8部件組成。為實現4行芹菜收獲作業,下刀片與上刀片的最大距離應不小于4倍的芹菜定植行距,因此上下刀桿分別布置4個刀片,刀片間隔為90 mm。切割機構結構示意圖如圖4所示。
收獲機電機動力經由齒輪和鏈傳動將動力傳遞到切割機構的偏心凸輪軸,再傳給雙凸輪。上凸輪8作用于上邊框5,帶動上刀桿3和上刀片2作往復移動運動;下凸輪7作用于下邊框6,帶動下刀桿4和下刀片2作往復移動運動。上凸輪7和下凸輪8的相位差為180°,因此,在任意時刻兩動刀的移動方向是相反的,從而完成芹菜切割作業。
2 切割機構運動學和動力學分析
芹菜切割機構要入土切斷芹菜根部,必須滿足一定的運動和動力要求。因此,本文對切割機構進行運動學和動力學分析,建立其運動學和動力學模型,為后續機構優化設計提供依據。
2.1 切割機構運動學分析
切割機構為直動平底推桿凸輪機構,其運動示意圖如圖5所示。采用反轉法對切割機構進行運動學分析。偏心圓凸輪1以等角速度ω逆時針轉動,推桿2(即割刀)的初始位置是Ⅰ;凸輪反轉過角度φ時,割刀處于位置Ⅱ。
分析圖5中構件運動位置關系可知,
e/sin90°=L1/sin(90°-φ),
L1+L2+S=R1,
L2=R2(1)
其中:e為凸輪的偏心距,mm;φ為凸輪的轉角,(°);L1為OC的長度,mm;L2為CD的長度,mm;S為割刀的位移,mm;R1為凸輪的半徑,mm;R2?? 為基圓的半徑,mm。
割刀的位移為
S=R1-R2-ecosφ(2)
對式(2)求導,得到割刀速度
v=eωsinφ(3)
其中:v為割刀的速度,mm/s;ω為凸輪的角速度,(°)/s。
對式(3)求導,得到割刀加速度
a=eω2cosφ(4)
其中:a為割刀的加速度,mm/s2。
2.2 切割機構動力學分析
應用動態靜力分析法對芹菜切割機構進行動力學分析,建立機構動力學模型。切割機構受力分析如圖6所示。
以割刀為研究對象,動力學平衡方程為
Ff1-FN2-4FN3cosθ+4Ff3sinθ+ Ff4-m1a=0,
Ff2+4FN3sinθ-4Ff3cosθ-FN4=0,
F2N3+F2f3=F23(5)
其中:Ff1為地面對割刀的阻力,N;FN2為凸輪對割刀的支持力,N;FN3為芹菜對割刀的壓力,N;Ff3為芹菜對割刀的摩擦力,N;Ff4為車架對割刀的摩擦力,N;θ為割刀的切割角,(°);m1為凸輪的質量,kg;Ff2為凸輪對割刀的阻力,N;FN4為車架對割刀的支持力,N;F3為芹菜對割刀的反力,N。
以凸輪為研究對象,動力學平衡方程為
∑Fx=FN2-FX1=0,
∑Fy=Ff2-FY1=0,
∑MO1=M-Ff2(e-cosφ)=0(6)
其中:FX1為凸輪在O1點受到X方向的力,N;FY1為凸輪在O1點受到Y方向的力,N;M為凸輪在O1點受到的力矩,N·m。
各摩擦力為
Ff1=μ1G1,
Ff2=μ2FN2,
Ff3=μ3FN3,
Ff4=μ4FN4(7)
其中:G1為割刀的重力,N;μ1、μ2、μ3、μ4分別為割刀和地面的滑動摩擦因素、割刀和凸輪的滑動摩擦因素、割刀和芹菜的滑動摩擦因素、割刀和車架的滑動摩擦因素。
根據文獻[15-17]可知,割刀和土壤的滑動摩擦因素為0.30~0.65,鋼與軟鋼的滑動摩擦因素為0.10~0.20;動刀片對蔬菜莖稈的摩擦角為23°~35°,為防止莖稈沿割刀滑移,切割角要小于等于動刀片對蔬菜莖稈的摩擦角。為保證芹菜能被成功切斷切割力要大于29.40 N。切割機構動力學的有關參數值見表2。
根據式(5)—(7)和表2數據可以求得
FX1=FN2=140.83+1.25R1ω2cosφ,
FY1=28.166+0.25R1ω2cosφ,
M=(28.166+0.25R1ω2cosφ)(R1-ecosφ)(8)
3 切割機構的優化設計
根據切割機構的運動學和動力學分析建立切割機構優化設計模型,并應用Matlab 2019b中遺傳算法工具箱和GUI開發平臺,對切割機構參數進行優化與分析[18-20]。
3.1 優化設計模型及約束條件
凸輪受力波動越小,機構運行就越平穩、使用壽命就越長。因此,將凸輪機構運轉一周其轉動中心受力的方差值Fe最小作為目標函數,即
minFe=1n∑ni=1(FRi-FR)2(9)
其中:FRi(φ)=F2Xi(φ)+F2Yi(φ),為任意位置凸輪轉動中心受力,N;FR=1n∑ni=1FRi,為凸輪機構運轉一周其轉動中心受力的平均值,N。
根據切割機構的運動學和動力學模型,取偏心圓凸輪的半徑R1和偏心距e為優化設計變量;為便于凸輪制造加工,兩個參數取值均為整數。
根據切割機構的設計要求,確定以下約束條件:
a)割刀行程大于芹菜根部的最大直徑。由于芹菜根部存在根須,芹菜根部最大直徑約為17 mm,且割刀行程不超過芹菜根部直徑的1.50倍,故可得
17.00≤2e≤25.50(10)
b)凸輪通過鍵與凸輪軸連接,凸輪基圓直徑應大于或等于凸輪軸直徑的1.60~2.00倍,即:
R2=R1-e,
0.8d≤R2≤d(11)
其中:d為凸輪軸半徑,本文取為8 mm。則有
6.40≤R1-e≤8.00(12)
3.2 優化結果與分析
本文應用Matlab 2019b的遺傳算法工具箱對機構參數進行優化。以上文運動學和動力學分析為基礎建立凸輪半徑R1、偏心距e和目標函數的關系方程,使用Matlab 2019b軟件編寫目標函數關系方程。將建立的目標函數m文件導入Matlab 2019b應用程序的優化界面,根據式(10)和式(12)添加約束條件后運行遺傳算法,得到參數優化結果。再將最優解參數輸入優化軟件交互界面的參數輸入區,得到切割機構的運動特性[21-25]。
遺傳算法迭代了74次后得到最優解:R1=19 mm,e=12 mm。將最優解參數輸入優化軟件交互界面的參數輸入區,得到切割機構割刀的位移、速度和加速度變化曲線圖,以及凸輪受力變化曲線,分別如圖7和圖8所示。
從圖7(a)可知,割刀的最大位移為24.00 mm,符合設計要求。從割刀的速度曲線可知,割刀的最大速度為0.23 m/s左右。從割刀的加速度曲線可知,割刀的最大加速度以及最小加速度在凸輪機構的極限位置,最大加速度約為4.80 m/s2。由于加速度曲線連續,機構不會產生沖擊。
從圖8(a)可知,凸輪轉動中心X方向受力最大值約為149.10 N,最小值約為132.50 N;從圖8(b)可知,凸輪轉動中心Y方向受力最大值約為29.90 N,最小值約為26.50 N。從圖8(c)可知,凸輪軸所受力矩最大值約為0.83 N·m,最小值約為0.24 N·m。
4 切割機構仿真分析
根據優化切割機構優化后的參數完成機構結構設計,應用Solidworks 2018建立了切割機構的三維實體模型,并導入Adams中,添加各個零件間的相應約束和作用力,建立切割機構運動學和動力學仿真模型,對機構的運動學和動力學特性進行仿真分析,機構虛擬樣機仿真界面如圖9所示。
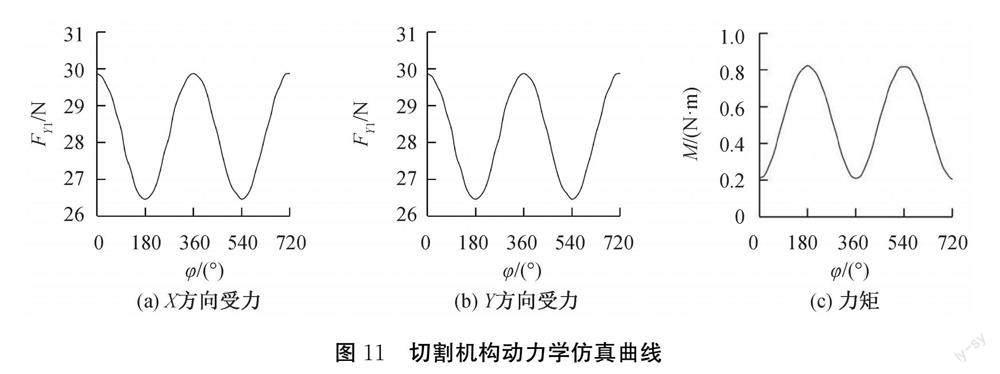
通過Adams軟件進行切割機構的運動學和動力學仿真分析,得到割刀的位移、速度、加速度變化曲線,如圖10所示;凸輪轉動中心X方向和Y方向的受力變化曲線和力矩變化曲線如圖11所示。
由切割機構運動學和動力學仿真結果可知:割刀最大位移、速度和加速度值分別約為24.00 mm、0.23 m/s和4.80 m/s2;凸輪轉動中心X方向和Y方向的最大受力分別約為149.10 N和29.90 N,凸輪軸所受力矩最大值約為0.83 N·m。
通過比較理論計算和仿真分析的結果可以發現,兩種方法所得到的運動學和動力學曲線的幅值大小、曲線形狀都基本一致,這表明切割機構運動學和動力學模型及優化設計結果是正確的。
5 樣機切割性能試驗
制造加工出芹菜收獲機零件并裝配樣機,樣機照片如圖12所示。開展樣機芹菜切割性能試驗。通過實驗室土壟試驗模擬田間作業,土壟長、寬、高分別為500、300、60 mm,試驗本芹50株,高度約為400 mm,行距為100 mm,株距為90 mm,種植深度約為50 mm,試驗土壟與芹菜照片如圖13所示。
在切割性能測試試驗時,先啟動電源,調整割刀位置至土下10 mm,再推著收獲機樣機以0.32 m/s左右的速度前進。切割完成之后,通過觀察芹菜根部切割情況分析切割性能。
試驗結果表明,芹菜切割成功率為82%。篩選出兩種切割效果具有代表性的芹菜,切割效果相對較好的芹菜照片如圖14(a)所示,芹菜根莖結合處被成功切斷且其莖稈無切散現象。切割效果較差的芹菜照片如圖14(b)所示,芹菜的莖稈被切散或者芹菜根部未被切斷。由試驗結果可知,切割機構能夠較好地切斷芹菜。但由于芹菜是種在試驗土壟而非田間,根系附著力不夠,造成芹菜根部未切斷;另外,芹菜種植深度不夠標準,存在莖稈進入土下的情況,切割時切到莖稈而非根部,造成芹菜莖稈分散。
6 結 論
本文為實現南方芹菜機械化收獲作業,基于南方芹菜的機械物理特性和種植農藝的研究,提出了一種手扶式芹菜收獲機的直動平底推桿凸輪式雙動刀往復切割機構。通過開展切割機構的運動學和動力學建模與分析、參數優化、虛擬仿真和樣機試驗等研究工作,得到的主要結論:影響切割機構割刀的位移和凸輪轉動中心受力的主要機構參數是偏心圓凸輪的半徑和偏心距;通過機構優化設計確定偏心圓凸輪的半徑為19 mm、偏心距為12 mm,割刀位移能夠滿足芹菜收獲作業要求,且凸輪轉動中心受力的方差最小,機構運轉平穩性好。通過切割機構虛擬樣機仿真,驗證了機構理論模型和設計的正確性。當芹菜收獲機樣機以0.32 m/s速度前進時,芹菜切割成功率為82%,這表明所提出的切割機構具有應用于芹菜收獲機的可行性。本文可為芹菜收獲機切割機構的研發提供理論和試驗依據,從而推動芹菜收獲機械的研發工作,提升芹菜機械化收獲水平。
參考文獻:
[1]楊玥,馮顧城,李炘燁,等.芹菜產品“互聯網+”銷售模式[J].長江蔬菜,2020(20):24-27.
[2]李蜀予,王艷梅,張清林.牽引式芹菜自動收獲機的研究設計[J].農業技術與裝備,2020(11):35-36.
[3]王偉,呂曉蘭,王士林,等.莖葉類蔬菜機械化收獲技術研究現狀與發展[J].中國農業大學學報,2021,26(4):117-127.
[4]Shin C S, Yun T Y, Choi H, et al. Experimental study on the structural safety of the corn harvester attached to a tractor[J]. The Korean Society of Manufacturing Process Engineers, 2020, 19(2): 24-29.
[5]伍淵遠. 溫室芹菜收獲機的設計[D]. 銀川: 寧夏大學,2018: 15-16.
[6]張貝貝,羅海峰,肖霄,等.油菜循環鏈式切割器的設計與試驗[J].湖南農業大學學報(自然科學版), 2019, 45(4): 440-443.
[7]黃凱美,趙捷,顏韶兵,等.杭州秋冬季芹菜品種篩選試驗[J].浙江農業科學,2019,60(9):1561-1562.
[8]汪李平.長江流域塑料大棚芹菜栽培技術: 上[J].長江蔬菜,2018(22):15-20.
[9]賈麗麗,沈迪,陳龍正,等.蘇南地區秋冬茬移栽芹菜農藝性狀的比較與評價[J].上海農業學報,2021,37(1):1-7.
[10]姚森,張健飛,肖宏儒,等.4GYZ-1200甘藍收獲機的設計與試驗[J].農機化研究,2021,43(3):52-57.
[11]張燕青,崔清亮,郭玉明,等.谷子莖稈切割力學特性試驗與分析[J].農業機械學報,2019,50(4):146-155.
[12]Song S Y, Zhou H P, Xu L Y, et al. Cutting mechanical properties of sisal leaves under rotary impact cutting[J]. Industrial Crops and Products, 2022, 182: 114856.
[13]李天華,孟志偉,丁賀賀,等.甘藍切根作業力學分析與參數優化[J].農業工程學報,2020,36(7):63-72.
[14]王偉偉. 芹菜收獲機的設計與試驗研究[D].杭州:浙江理工大學,2021:12-14.
[15]施印炎,章永年,汪小旵,等.基于Pro/E的莖葉類蔬菜有序收獲機設計[J].農機化研究,2017,39(3):139-143.
[16]沈亮,楊華,安紅宇,等.胡蘿卜收獲機的設計[J].農機化研究,2015,37(11):71-76.
[17]廖慶喜,王乾祥,萬星宇,等.自走式油菜薹收獲機設計與試驗[J].農業機械學報,2023,54(3):126-138.
[18]魏天路,杜爽,葛宜元,等.青飼料收獲機切碎輥刀具的優化設計及試驗[J].中國農業科技導報,2020,22(12):77-87.
[19]王佳,李紹波,陳春皓,等.葡萄莖稈切割裝置作業參數優化與試驗[J].中國農機化學報,2023,44(2):37-45.
[20]韓余,宋志禹,陳巧敏,等.弧型往復雙動式采茶切割器優化與試驗[J].農業工程學報,2022,38(24):35-43.
[21]何小晶,孫新城,陳建能,等.雙曲柄五桿栽植機構運動學分析[J].浙江理工大學學報(自然科學版),2016,35(2):198-204.
[22]Ye B L, Zeng G J, Deng B, et al. Design and tests of a rotary plug seedling pick-up mechanism for vegetable automatic transplanter[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(3): 70-78.
[23]Yu Y X, Liu J K, Ye B L, et al. Design and experimental research on seedling pick-up mechanism of planetary gear train with combined non-circular gear transmission[J]. Chinese Journal of Mechanical Engineering, 2019, 32(3): 54-66.
[24]施印炎,陳滿,汪小旵,等.蘆蒿有序收獲機切割器動力學仿真與試驗[J].農業機械學報,2017,48(2):110-116.
[25]Tong Z P, Yu G H, Zhao X, et al. Design of vegetable pot seedling pick-up mechanism with planetary gear train[J]. Chinese Journal of Mechanical Engineering, 2020, 33(1): 63.
(責任編輯:康 鋒)
收稿日期: 2023-03-23? 網絡出版日期:2023-06-07網絡出版日期
基金項目: 國家自然科學基金項目(32171899)
作者簡介: 杜成成(1998— ),男,浙江東陽人,碩士研究生,主要從事農業機械設計方面的研究。
通信作者: 葉秉良,E-mail:zist_ybl@zstu.edu.cn