L3智能駕駛中駕駛員反應能力分析
2023-09-01 01:39:48葉國根侯立升李齊麗龔雪顏
北京汽車 2023年4期
葉國根,侯立升,李齊麗,龔雪顏
Ye Guogen,Hou Lisheng,Li Qili,Gong Xueyan
(寧波吉利汽車研究開發有限公司,浙江 寧波 315300)
0 引 言
2021 年8 月,國家市場監督管理總局正式發布GB/T 40429—2021《汽車駕駛自動化分級》[1],其中明確了駕駛自動化等級與劃分要素的關系以及用戶與駕駛自動化系統的角色分工,指出L3級[1]及以下自動駕駛車輛的駕駛員需關注周邊環境,且必須在系統發出介入請求后立刻接管車輛。在輔助駕駛系統激活條件下,駕駛員實際接管車輛的能力如何,目前相關分析數據較少。
本文針對不同駕齡、不同性別、不同年齡的駕駛員進行L3 智能駕駛實車測試,通過數據和視頻記錄不同駕駛員在系統隨機出現接管請求時的反應能力,為用于驗證車輛功能安全、預期功能安全的HARA (Hazard Analysis and Risk Assessment,危害分析和風險評估)[2]以及智能駕駛系統開發提供數據參考。
1 測試準備及過程
駕駛員反應能力測試的實車環境如圖1所示,為保證測試結果的準確性,測試車輛、數據采集設備、測試人員、測試環境等均處于良好狀態。
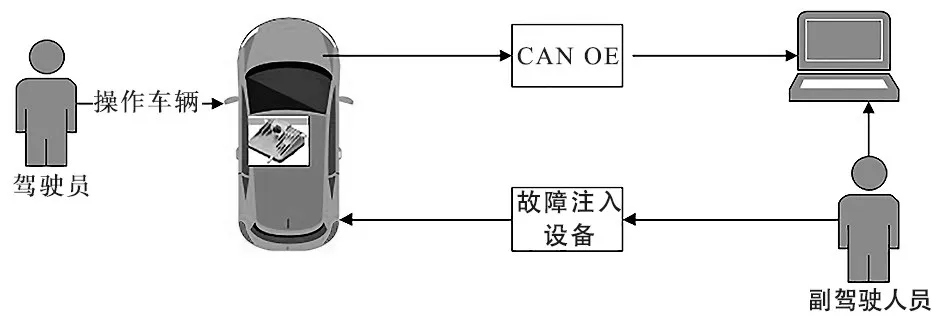
圖1 搭建駕駛員反應測試實車環境
1.1 測試資源
1.1.1 試驗樣車
試驗需要準備至少兩輛車,一輛車用于測試,需具備TJP(Traffic Jam Pilot,交通擁堵領航)功能,TJP 可實現在一定車速范圍內控制車輛橫向和縱向運動,當TJP 工作時,駕駛員可在短時間內松開轉向盤和轉移視線,當該功能退出時會發出語音及文字提醒駕駛員;另一輛車作為前方目標車,保障測試過程安全。用于測試的車輛進行簡單改制,屏蔽駕駛員監控功能,使測試過程可以模擬完全自動駕駛。
試驗樣車應保證儀表顯示正常,制動、轉向系統無故障也無性能衰減現象,喇叭、警示燈等均可正常工作。
1.1.2 測試數據采集
數據采集設備CAN OE (Controller Area Network Open Environment,控制器局域網絡開發環境)經診斷接口與車輛網絡相連,同時通過線纜與上位機連接。測試過程中,數據采集人員通過上位機進行數據實時監控和采集。
在進行故障注入時,除采集整車數據外,需通過視頻記錄設備同步記錄被測駕駛員的駕駛表現。
1.1.3 測試人員
共選取10名駕駛員進行測試。試驗開始前對駕駛員進行安全培訓,介紹TJP的具體作用,包括功能開啟、功能ODD(Operational Design Domain,設計運行范圍)、功能退出的提醒等。需要注意,試驗開始前不能提前告知駕駛員測試目的、測試方法以及故障注入方式。
考慮駕駛員年齡、駕駛風格、性別、駕齡的差異[3-4],被測人員分布情況如圖2所示。

圖2 被測人員分布情況
1.1.4 測試場地
智能駕駛測試路段需有高精地圖覆蓋,車流量適中,環境光線良好。
1.2 測試步驟
整個測試分為以下步驟:
(1)測試開始前,確認測試車輛狀態:油量/電量是否充足,輪胎胎壓是否正常,整車有無影響智能駕駛功能正常使用的故障,數據采集設備是否正常工作;
(2)確認車輛狀態良好后,將測試車行駛至測試路段,測試車與目標車相距20 m(最小跟車距離),前方目標車以50 km/h車速穩定行駛;
(3)被測駕駛員駕駛測試車輛,開啟TJP 功能,設置巡航車速為60 km/h;
(4)待測試車輛保持穩定跟車后,被測駕駛員模擬正常行車習慣,例如聽音樂、看電視、玩手機、與同乘人聊天、接打電話等,確保車輛處于完全自動駕駛狀態;
(5)副駕駛員實時關注車輛周邊環境,在適當時刻(駕駛員注意力不在正前方時)注入故障,故障注入方式為非預期激活EPB(Electrical Park Brake,電子駐車制動系統),促使車輛發出接管請求,觀察并記錄被測駕駛員的反應,計劃為每名駕駛員測試10次;
(6)測試數據需實時記錄和保存,主要記錄數據包括轉向盤扭矩、功能激活狀態位、制動踏板狀態位、加速踏板狀態位、駕駛員的基本信息包括年齡、駕駛風格、性別、駕齡、接管方式以及故障注入狀態位。
2 測試結果分析
2.1 測試結果
將測試中駕駛員可能出現的接管方式分為4類:轉向盤接管、加速踏板接管、制動接管以及未接管,測試結果見表1,其中測試人員3 在第3次測試時接打電話過于專注未及時接管車輛,車輛系統執行了安全停車策略。

表1 駕駛員接管行為統計
試驗中統計所有被測駕駛員各次測試的接管反應時間,以及接管時的轉向盤扭矩,如圖3、圖4所示。
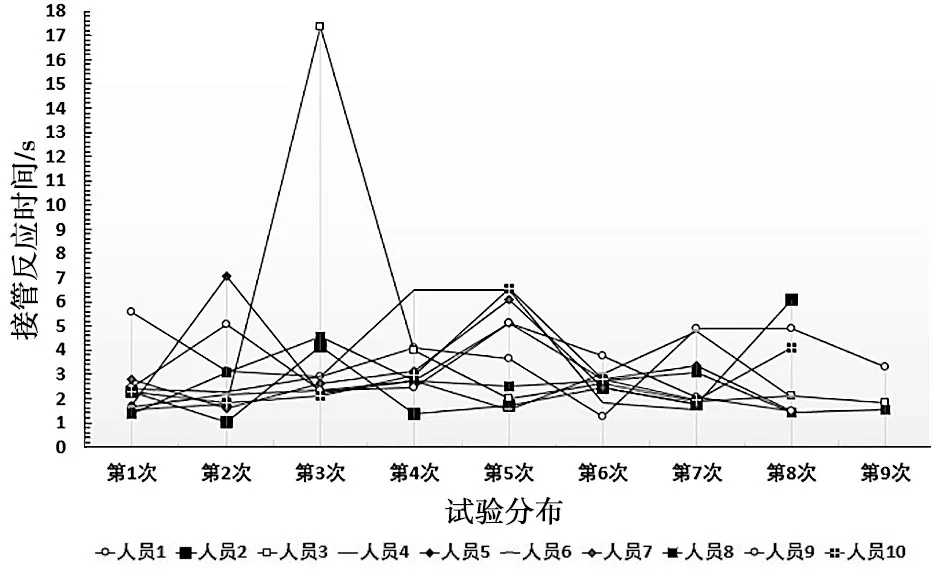
圖3 駕駛員接管車輛的反應時間
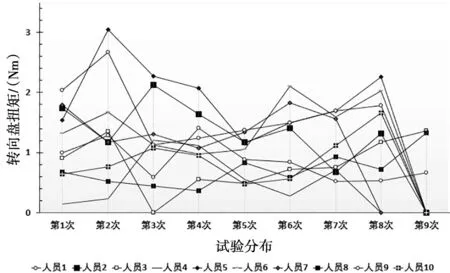
圖4 駕駛員接管轉向盤的扭矩分布
受測試路段里程、路況及駕駛員實際駕駛行為等因素影響,縮減每名駕駛員的測試次數,具體見表1。
2.2 結果分析
由表1 可知,被測駕駛員接收到車輛接管提示后,幾乎都采用轉向盤接管方式控制車輛,性別、年齡和駕齡對被測駕駛員的第一反應不產生影響,整個測試過程未出現誤踩加速踏板的情況。
由圖3 可知,在車輛完全自動駕駛過程中,被測駕駛員沒有關注周邊環境情況,接管反應時間基本在3~7 s,其中6.17%的駕駛員可以在小于1.5 s接管車輛,23.45%的駕駛員可以在1.5~ < 2 s接管車輛,35.82%的駕駛員可以在2~ < 3 s 接管車輛,20.98%的駕駛員可以在3~ < 5 s 接管車輛,13.58%的駕駛員接管車輛時間大于等于5 s,整個測試的平均接管反應時間為3.12 s[5]。僅從接管時間進行判定,由接管時間3.12 s 可判定駕駛員的可控性為不可控,對應可控性評級為C3[2];假設車輛開啟TJP 功能以80~100 km/h 車速行駛在彎道內(彎道半徑250 m),TJP 功能退出或發生非預期轉向后,車輛不再沿車道線行駛而是沿彎道切線方向行駛,與路沿發生碰撞的時間約為0.95~1.08 s,如果駕駛員在此時間內未接管車輛則可能發生較嚴重的交通事故。
由圖4 可知,被測駕駛員通過轉向盤接管車輛時,對轉向盤施加的扭矩幾乎都不超過3 Nm,其中38.75%的駕駛員接管力矩小于1 Nm,50%的駕駛員接管力矩為1~ < 2 Nm,10%的駕駛員接管力矩為2~ < 3 Nm,1.25%的駕駛員接管力矩大于等于3 Nm,整個測試的平均接管扭矩為1.18 Nm[6]。僅從駕駛員接管轉向盤的扭矩進行判定,與行業通用的駕駛員接管可控性標準(3 Nm)進行對比,駕駛員在TJP 功能退出時接管的手力矩基本在可控的度量范圍內,但不排除出現較大的非預期轉向。
3 智能駕駛系統改進建議
針對上述測試中環境因素(音樂/視頻聲音、聊天聲音、電話聲等)對駕駛員接收接管車輛提醒的影響,例如多媒體聲音過大掩蓋了車輛接管報警提醒,以及未接管時車輛進入功能安全狀態情況,提出以下改進建議:
(1)接管提醒的報警優先級定義為最高級別,觸發接管提醒時同步降低多媒體音量,盡可能地保證駕駛員及時接收到接管提醒;
(2)接管提醒的方式應至少包含文字/圖標彈窗、語音播報,同時通過安全帶預緊、座椅振動等方式進行,增加提醒信息傳輸的可靠性;
(3)采用階梯式安全設計,第1階段為接管提醒,第2階段觸發初級功能降級,即禁止橫向控制只保留縱向控制,第3階段全功能降級,即保持當前車道緩慢減速至停車,啟動EPB并點亮雙閃燈;
(4)實時在線監控駕駛員,保證駕駛員在環,可以及時接管車輛。
4 結束語
對L3智能駕駛車輛由完全自動駕駛狀態進入手動接管車輛過程進行測試,發現駕駛員的反應時間為3~7 s,駕駛員一旦接收到接管提醒,基本都會進行接管操作。
在后續試驗中,需不斷拓展測試樣本量,增加更多駕駛員以避免個別極端參數導致結果偏差,需增加不同提醒方式下駕駛員反應時間測試和不同失效工況時駕駛員的可控性測試等,為L3和更高級別自動駕駛功能開發提供數據支持。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車電器(2018年1期)2018-06-05 01:22:54
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
公民與法治(2016年4期)2016-05-17 04:09:26
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55