長測程機載激光雷達系統在線性工程地形圖測繪中的應用
2023-09-06 06:17:37董明輝
現代信息科技 2023年14期
摘 ?要:隨著測繪新技術的不斷發展,傳統測量手段已經不適應當前線性工程大比例地形圖測繪需求,在此背景下,長測程機載激光雷達系統憑借其自動化程度高、受天氣影響小、數據生產周期短、精度高等特點,在線性工程地形圖測繪中起到越來越重要的作用。文章以廣西線性工程項目為例,研究長測程機載激光雷達系統在1:1 000地形圖測繪中的應用,以供同類項目提供借鑒和參考。
關鍵詞:長測程;激光雷達系統;線性工程;1:1 000測圖
中圖分類號:TP39 ? ? 文獻標識碼:A ? 文章編號:2096-4706(2023)14-0094-05
Application of Long Range Airborne Lidar System in Linear Engineering Topographic Mapping
DONG Minghui
(Guangxi Zhuang Autonomous Region Institute of Land Surveying and Mapping, Nanning ?530023, China)
Abstract: With the continuous development of new surveying and mapping technologies, the traditional surveying methods have not adapted to the current needs of large-scale topographic mapping of linear engineering. In this context, the long range airborne lidar system plays an increasingly important role in the mapping of linear engineering topographic maps by characteristic of its high degree of automation, small weather impact, short data production cycle and high accuracy. Taking the Guangxi Linear Engineering Project as an example, this paper studies the application of long range airborne lidar system in 1:1 000 surveying and mapping of topographic map to provide reference for similar projects.
Keywords: long range; lidar system; linear engineering; 1:1 000 mapping
0 ?引 ?言
機載激光雷達系統是一種主動式對地觀測系統,它集成激光測距技術、攝影測量技術、計算機技術、慣性測量單元(IMU)、差分全球定位系統技術于一體,已經成為地形圖測繪的主要手段之一。近年來隨著機載激光雷達系統不斷發展,其有效測程可達到千米級,已廣泛應用于公路測量、電力測量、三維數字城市建設、海洋測繪、森林植被勘測、自然環境與災害監測等領域。本文以廣西線性工程項目為例,研究長測程機載激光雷達系統在1:1 000比例尺地形圖測繪中的應用,其作業方法具有極大的推廣應用價值。
1 ?測區概況
本測區為G75蘭海高速(欽州至北海段),起點為欽州市欽南區,終點為北海市合浦縣(如圖1所示),項目全長110 km,地形主要為丘陵山地,最低海拔為2 m,最高海拔為81 m。項目應用了中海達ARS-1000L長測程機載激光雷達系統,進行1:1 000比例尺數字高程模型(DEM)、數字正射影像圖(DOM)、數字線劃圖(DLG)生產,飛行平臺為曜宇Yunux-Long 120 Pro電動六旋翼無人機,最大續航可達120 min,最高升限4 000 m,巡航速度50 km/h,激光雷達系統最大測程為1 350 m,最大掃描頻率820 kHz,可支持無限次回波,系統精度可達5 cm,集成4 240萬像素高清數碼相機。
2 ?技術流程
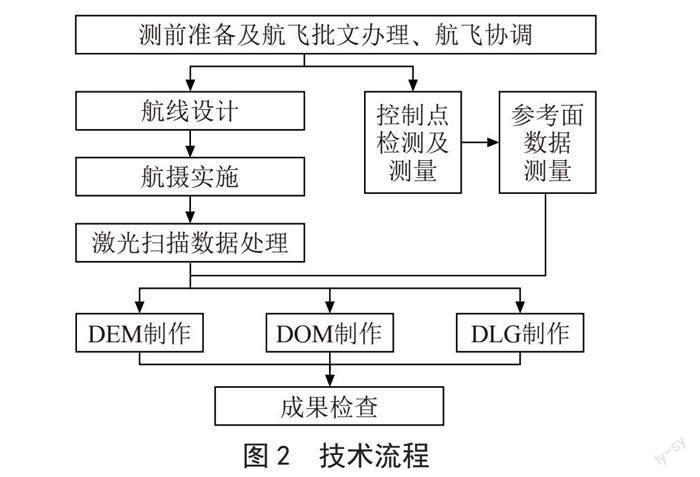
項目各項工作均按照技術規范規定的流程進行作業,主要包括測前準備、航線設計、航拍實施,同時進行控制點檢測及測量、參考面數據測量,最終制作出數字高程模型(DEM)、數字正射影像(DOM)、數字線劃地圖(DLG)成果并進行質量檢查(如圖2所示)。
2.1 ?航線設計
因項目區為線性工程,無人機航線平行于道路主干道進行設計,根據地形起伏、飛行安全條件、道路彎曲程度,將項目區劃分為多個航攝分區,分區間在保障重疊度的同時,完整覆蓋整個攝區。項目測量范圍為道路征地紅線外擴20 m,每個航攝分區布設2條航線即可,根據項目精度要求及規范要求,無人機參數設計為:巡航速度10 m/s,相對航高300 m,激光脈沖頻率100 kHz,激光點密度50點/平方米,航向影像重疊度設置為65%,旁向影像重疊度設置為30%。
2.2 ?基站架設
激光雷達系統采用了DGPS差分定位技術,需在項目區沿線布設一定數量的地面基站,通過計算基準站至衛星的距離改正數,可以提高激光雷達系統的定位精度。本項目各地面基站間的距離約為15 km左右,能夠滿足航飛時的要求,架設流程為先將腳架架設在已知點上方固定腳架并對中,隨后觀察基座上的水準氣泡判斷基座的平整程度,通過調整三腳架高度、旋轉微調螺旋使水準氣泡居中整平,再用卷尺測量已知點到儀器測量線的斜距并做記錄,最后設置好基站采集參數、連接上電子手簿即可開始數據采集。
2.3 ?參考面數據測量
在項目區均勻每隔10~15 km均勻布設一定數量的參考面,可以消除系統誤差,改正激光點云的平面及高程精度,每個參考面的平面主要采集高速路的道路邊線、涵洞口、路口拐角等明顯分界線處,高程主要采集主干道路面、路邊停車場等堅硬、寬闊無地形起伏的區域,參考面的點間距保持在2 m左右,總點數不少于30個。另外每隔一定間距建立一個檢查參考面,每個參考面采集10個點間距超2 m的檢查點,參考面平面測量相對于鄰近基本平面控制點的點位中誤差控制在±0.1 cm以內。
2.4 ?航攝實施
飛行前首先選擇視野開闊,空曠平整,上方無遮擋物的起飛場地,保障起飛場地內無行人通過、無信號干擾。在狹窄的區域,主觀上無法判定安全距離時,應提前使用小旋翼機巡查起降航線,確認安全飛行空間,如單測區過大或多測區連續作業,還須考慮飛機最大航程的限制,選擇最優的起降位置,保證飛行的安全與效率。到達起飛場地由地勤人員組裝飛機,組裝順序為先將各連接部件安裝上,然后是作業設備,最后是動力和電源裝置,安裝過程中必須輕拿輕放,完畢后檢查各連接部件是否牢固,電源及動力是否充足,根據作業內容與實地天氣條件設置作業設備參數,隨后進行起飛前檢查調試,重點測試螺旋槳、電機等有潛在危險的環節,檢查正常即可開展航攝作業。
無人機在起降和巡航階段,地面站人員應時刻注意地面站飛機飛行的各項指標與參數。如飛行高度、平飛與轉彎的姿態、電壓穩定性、通信狀況、偏航情況等;同時地勤人員需注意觀察現場天氣變化,不得擅離崗位,以備突發狀況及時處理。航攝作業完畢,立即檢查航片質量,若出現絕對漏洞、相對漏洞及其他缺陷,采用相同激光掃描參數進行補攝。
2.5 ?激光掃描數據處理
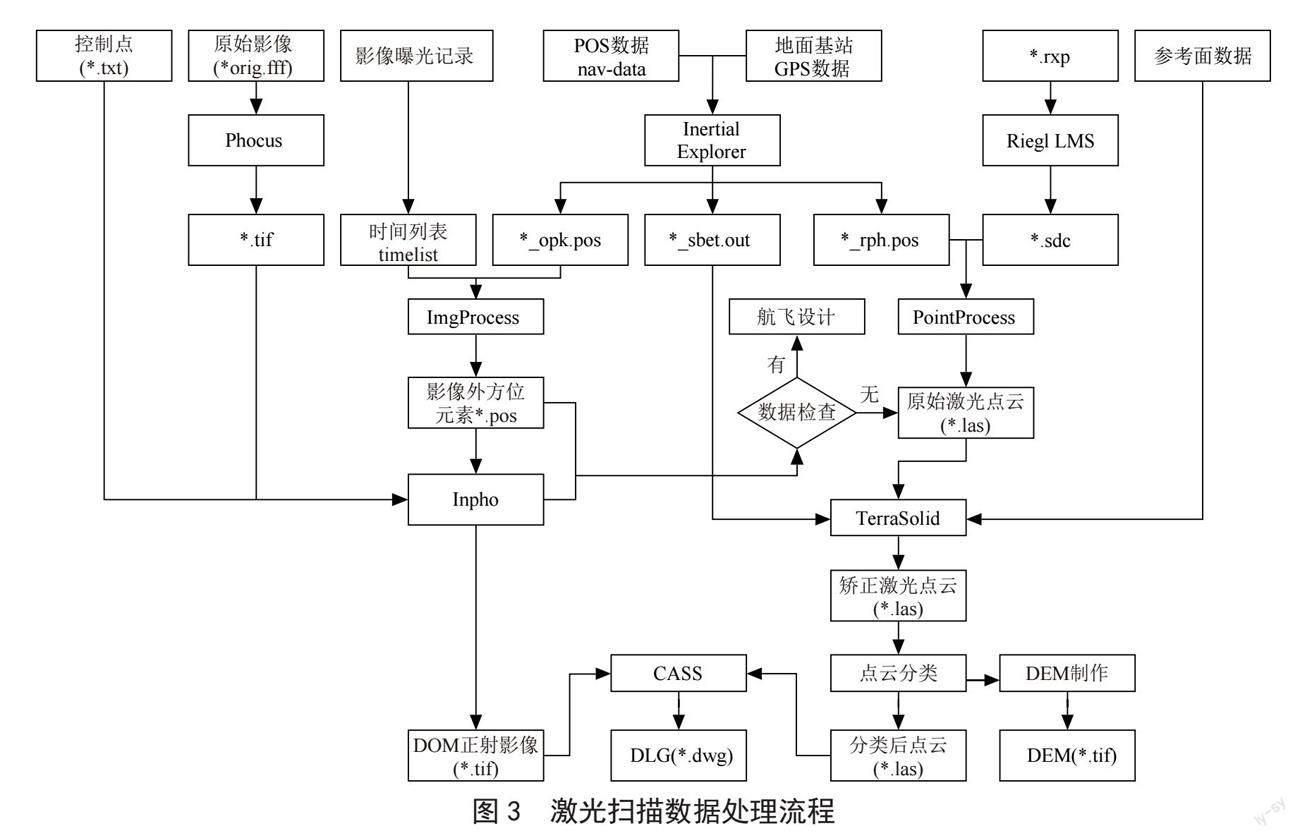
準備好格式轉換后的激光數據、影像數據、導航文件、飛行日志、平面參考面數據、高程參考面數據、飛行測區范圍數據后,即可開展激光掃描數據的處理(如圖3所示)。本項目采用NovAtel公司研制的Inertial Explorer軟件進行GPS/INS組合導航解算,導航文件位置精度達到0.05 m,姿態角中俯仰/翻滾角精度達到0.002 5°,航偏角精度達到0.005°。
數據解算主要包括數據模式轉換、添加數據、數據處理和數據導出。數據模式轉換階段過程中將基站數據轉換為靜態模式、移動站數據轉換為動態模式,隨后完成Inertial Explorer工程創建,添加轉換后數據進行緊耦合解算,完成慣導類型選擇、IMU設置、慣導陀螺儀參數設置、桿壁值設置即可進行正向、反向數據處理、融合解算即可獲取特定格式的軌跡文件和點云數據(如圖4所示)。
在獲取點云數據后,為保障點云精度,需利用TerraSolid軟件進行機載航帶校正,先將點云按航帶分類,只分地面點即可,隨后進行初始航帶誤差檢查,軟件生成的誤差報告只能做參考,實際誤差仍需對點云拉剖面檢查,利用tieline工具計算點云改正數,最后進行整體誤差改正與單航帶誤差改正可獲取更高精度的點云成果。
利用激光點云進行后續生產的關鍵技術是點云分類,通過編寫自動分類宏命令可完成點云自動分類,當點云重疊度很大,且點云密度很大時,需進行去重疊,裁掉邊緣的點云,分類順序為先分地面點再分植被點、建筑點,分類過程中根據測區實際情況設置合理的最大建筑尺寸、迭代角度、迭代距離等參數進一步提高分類精度,若自動分類效果仍不理想可通過Terrascan工具進行手動分類,若因水面鏡面反光出現點云空洞,還需進行點云補充。
2.6 ?數字高程模型(DEM)制作
在對采集的激光點云數據經過數據預處理、激光點云分類處理、激光點坐標系統轉換等一系列處理操作后,即可開展數字高程模型制作,利用激光點云分類獲取的地面激光點數據,根據約束條件使用Delaunay三角剖分算法可構建不規則三角網(TIN),對不規則三角網進行高程重采樣便可制作出數字高程模型(DEM),如圖5所示。根據實際情況需要和激光點云密度不足體現地表地區生成時,需加入特征線數據來配合生成DEM,如圖6所示。
2.7 ?數字正射影像(DOM)制作
在經過導航文件制作、DEM制作之后,可以獲取航攝影像的外方位元素以及測區地形數據,結合航攝影像進行圖像連接點提取、光束法平差、影像單張正射糾正、正射影像拼接,便可制作出DOM(如圖7所示)。
在圖像連接點提取過程中,本項目采用了基于DEM輔助的圖像連接點提取算法。利用原始激光點云數據,經過點云分類處理,過濾植被、建筑點,從而獲取地面點,在此基礎上,生成較高精度的數字地面模型,作為測區初始地形,縮小連接點匹配的搜索范圍,降低茂密植被重復紋理區的誤匹配概率,提高連接點在每層金字塔影像匹配的質量和精度,通過逐層控制與光束法平差,提高連接點在初始金字塔影像層的匹配精度,為最小二乘匹配法提供了良好的匹配初值。
利用在測區均勻分布的地面實測檢查點來檢查光束法平差精度,在圖像上人工刺出檢查點,利用光束法平差求解得到的外方位元素求解出檢查點的三維坐標,通過比較檢查點的實測坐標與求解坐標,便可以得到光束法平差精度。在圖像外方位元素精度較高、連接點分布均勻密集的條件下,光束法平差精度能達到0.07 m以內。
平差后需對影像進行單張糾正,實現兩個二維圖像之間的幾何變換,本項目采用數字微分糾正法進行單張糾正,該方法優點在于可以很好的消除由于像片傾斜、地形起伏引起的像點位移同時將影像歸化為成圖比例尺,其基本過程為確定原始影像與糾正后影像之間的幾何關系、求解對應像素的位置、進行灰度內插與賦值運算,設任意像元在原始圖像和糾正后圖像中的坐標分別為(x,y)和(X,Y)。它們之間存在著映射關系:
x = fx (X, Y );y = fy (X, Y )
X = φx (x, y);Y = φy(x, y)
在開展正射影像拼接前,先在單張糾正的影像中,挑選一張色調合適、明暗均勻的圖像作為模板圖像,將非正常影像以此圖像為基準就行修整,使所有圖像色調明暗盡量一致。對于圖像拼接線兩邊色調明暗不一致的,通過圖像編輯、羽化來改善拼接圖像的視覺效果,以此來避免航空影像在拍攝過程中,由于光照、陰影的變化,導致圖像的色調、明暗不同。對于拉花的情況,可以通過編輯拼接線,選擇圖像,利用沒有拉花的圖像用于拼接。對于無法通過編輯拼接線來進行修整的拉花區域,采用Photoshop軟件來進行編輯,最終可得到測區24位RGB彩色模式的全局正射影像(如圖8所示)。
2.8 ?1:1 000數字線劃地圖(DLG)制作
項目采用“激光點云輔助正射影像進行矢量化法”進行1:1 000比例尺全要素數字地形圖測繪,即利用正射影像圖采集地形要素,利用激光點云數據采集地貌要素。
利用正射影像圖采集交通及附屬設施、居民地及垣柵、管線及附屬設施、水系及附屬設施、植被等要素。準確繪制陸地上的道路及與道路相鄰的附屬設施,標注準確道路材質及其名稱,若多條道路相交時,需處理好相交關系,道路交叉口、公路路中、涵洞、隧道都需測注高程;在居民地及垣柵繪制過程中應能準確測繪房屋的外圍輪廓,反映出建筑的結構特征,當多間房屋或構筑物并連時需根據房屋結構及樓層數分開表示,按圖式規范表示房屋結構,圍墻用不依比例圍墻符號表示;管線及附屬設施主要包括通信線、電力線、鐵塔、電桿等要素,所有管線均需連線表示,管線密集部分可適當進行取舍;水系及附屬設施主要包括河流、湖泊、坑塘、水庫、水渠等要素,所有面狀要素繪制到水涯線,水渠寬度小于1 m時用單線繪制,同時要測標渠底高程、流向;植被主要包括耕地、園地及林地等要素,當同一地塊混種多種植被時,按經濟價值及種植數量進行取舍,每一地塊均應標繪植被符號。
利用點云數據生成等高線,繪制人工修筑或天然形成的陡坎、斜坡等地貌要素,繪制過程中需注意斜坡底需加繪地類界,人工整理過的邊坡用斜坡表示,挖掘地用坎或斜坡并配合地類界繪制其范圍表示,同時標注“掘”或根據實地注植被符號,施工地、平整地等均不繪制等高線,充分使用軟件的捕捉功能,各類地物相交的需捕捉到節點或線上,與坎或斜坡為分界的地物線應捕捉到坎線或斜坡線,不能只到坎牙,坎頭的坎上坎下需標注高程,坎長達30 m左右適當標注坎上坎下高程,高程點在30 m左右保留一個即可,地形特征點、邊坡位置應有高程點。
對于點云及影像圖上無法識別或分不清楚的各類井蓋、路標等獨立地物、建筑物屬性(層數)、材質、各類地理名稱和工礦企業名稱、植被名稱等開展外業實地調繪或實測。利用外業調繪或實測數據對地形圖成果進行更新,即可制作最終的DLG數據。
3 ?精度分析
依據《1:500、1:1 000、1:2 000地形圖航空攝影測量內業規范》的要求,1:1 000比例尺地形圖平面中誤差在平地、丘陵地區應小于等于0.5 m,高程中誤差在平地、丘陵地區應小于0.2 m。本項目平面檢測采用千尋CORS測量和全站儀測量相結合的方式進行,利用千尋CORS直接測量道路及橋梁的邊線、拐角等明顯特征點作為檢查點,另外用千尋CORS測量部分圖根點,然后結合全站儀測量房角點作為房屋平面檢查點;高程精度檢查采用RTK測量方法進行,采集道路面、坎上、坎下等地作為高程檢查點。通過對全線87個平面點、76個高程點進行檢測,平面中誤差為0.09 m、高程中誤差為0.12 m。從檢測結果來看,利用長測程機載激光雷達系統在線性工程中的應用,其數學精度能滿足相關規范要求。
4 ?結 ?論
公路、鐵路、石油與燃氣管道、城市綜合管網等線性工程建設是國民經濟發展的基礎和命脈,但其勘察設計、項目建設、確權等級周期往往受限于航測攝影條件所限,時間成本較高。長測程機載激光雷達系統采用主動激光測量,較常規攝影測量受到的天氣影響小、數據生產周期短、精度高等特點,通過機載激光雷達傳感器發射的激光脈沖能部分穿透樹林遮擋,直接獲取高精度三維地表地形數據,結合集成的高分辨率相機可以同時獲取地面高清影像,通過點云數據與影像數據的融合處理,即可獲取高精度的數字正射影像圖。根據數字正射影像和激光點云成果可獲得線性工程的大比例尺地形圖、影像圖及各類專題數據成果,從而極大簡化了攝影測量處理的工作流程,使處理結果更加精確可靠。隨著長測程機載激光雷達系統技術的不斷發展,其在線性工程大比例尺地形圖測繪的應用必將越來越廣泛。
參考文獻:
[1] 張小紅.機載激光雷達測量技術理論與方法 [M].武漢:武漢大學出版社,2007.
[2] 黃克城,宋時文,閻鳳霞.機載LiDAR技術在地形圖測繪中的應用 [J].地理空間信息,2016,14(4):99-101+12.
[3] 熊登亮,柯尊杰,陳舫益,等.機載LiDAR技術在測制城市1:1000地形圖中的應用 [J].勘察科學技術,2015(1):44-46+58.
[4] 黃華平,李永樹.機載激光雷達測量技術在鐵路勘測中的應用 [J].測繪,2010,33(5):216-217+228.
[5] 王應新.基于機載激光雷達的電力線路工程測量研究 [J].勘測測繪,2016,10:252-254.
作者簡介:董明輝(1989—),男,漢族,湖北武漢人,工程師,本科,主要研究方向:無人機低空攝影測量、實景三維模型建設、激光雷達系統測繪、自然資源調查。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
